- Преобразования систем координат

Содержание
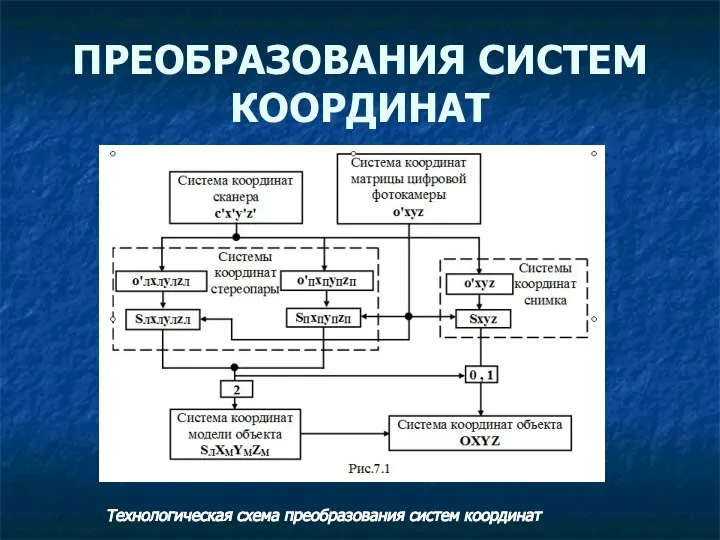
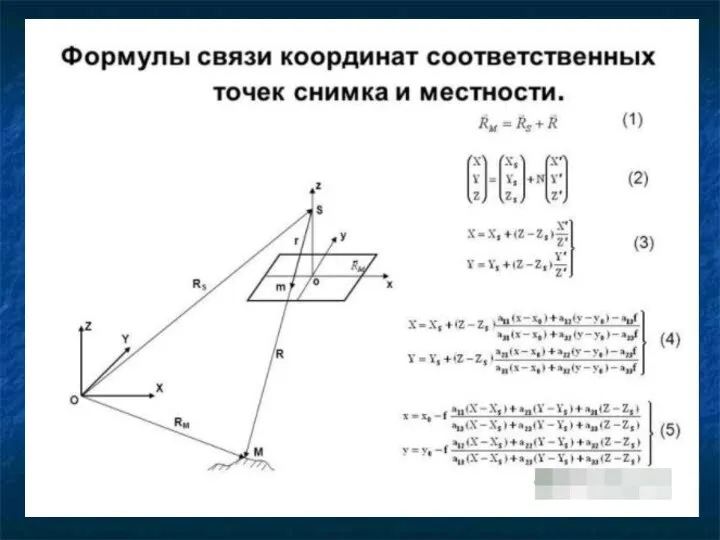
- 2. ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ Технологическая схема преобразования систем координат
- 3. Фотограмметрическая обработка снимков состоит из последовательных преобразований координат. На рис приведена цепочка таких преобразований координат при
- 4. Координаты точек стереопары и снимка можно преобразовать сразу в систему координат OXYZ объекта, если известны с
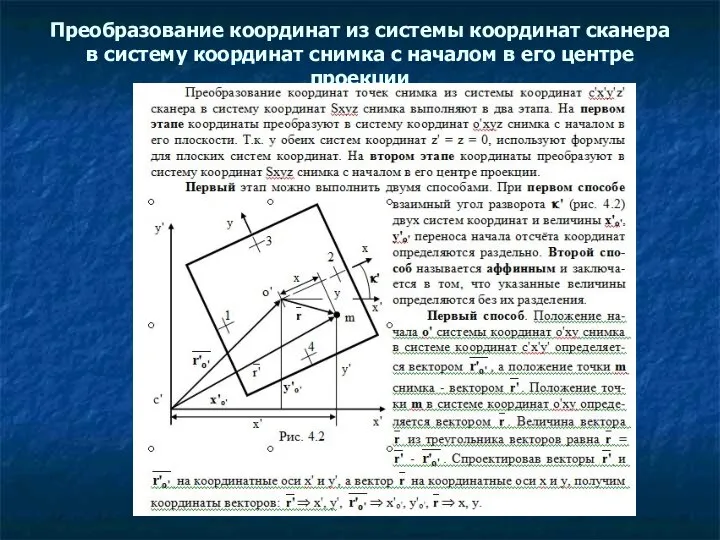
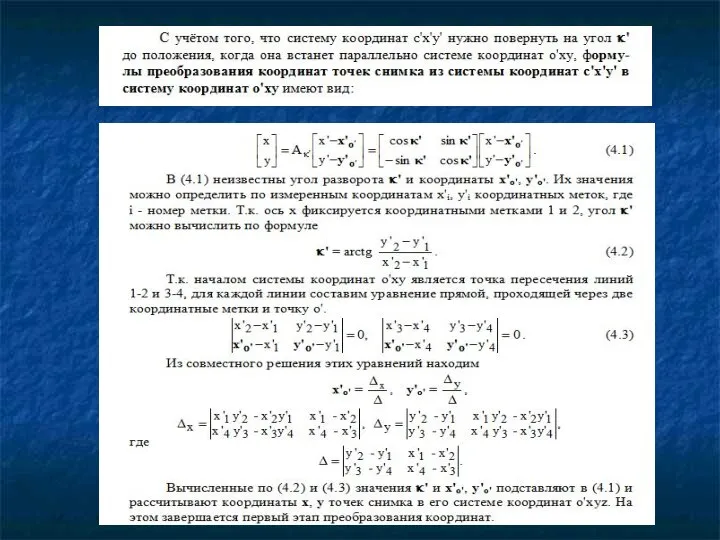
- 5. Преобразование координат из системы координат сканера в систему координат снимка с началом в его центре проекции
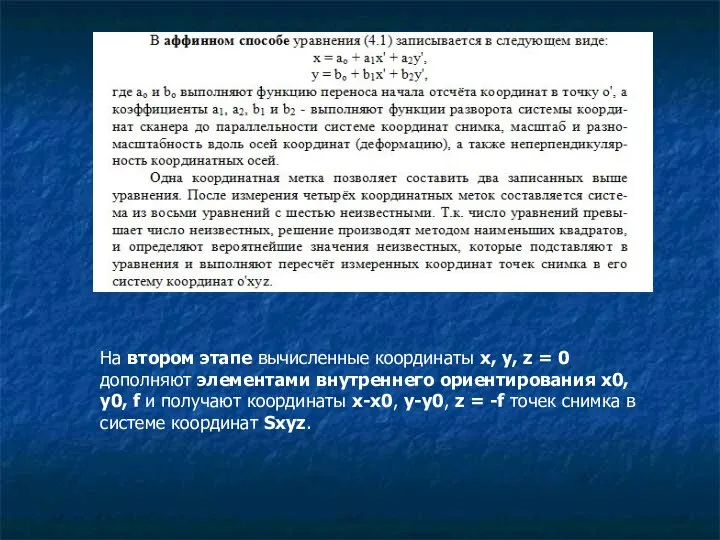
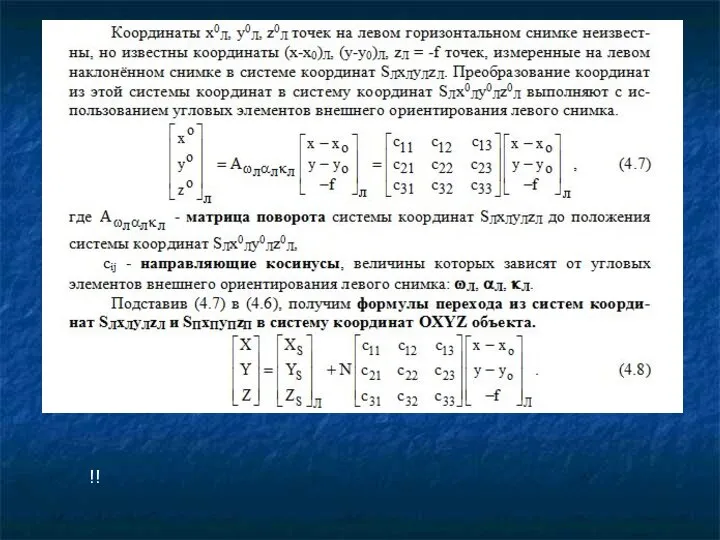
- 7. На втором этапе вычисленные координаты x, y, z = 0 дополняют элементами внутреннего ориентирования x0, y0,
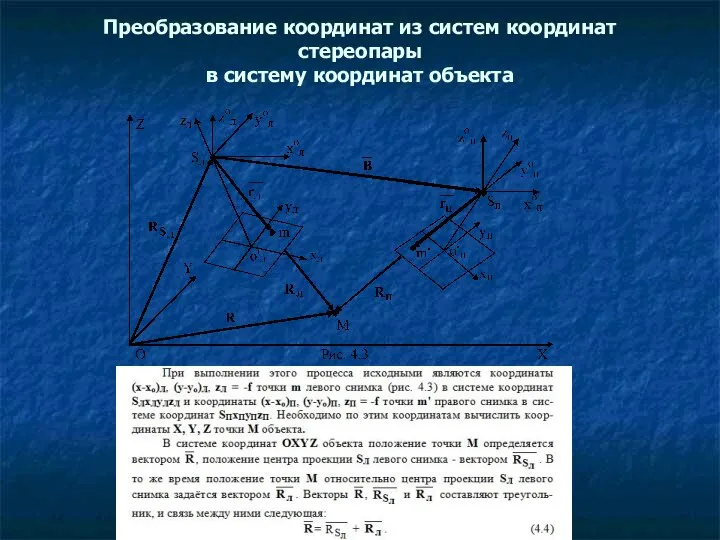
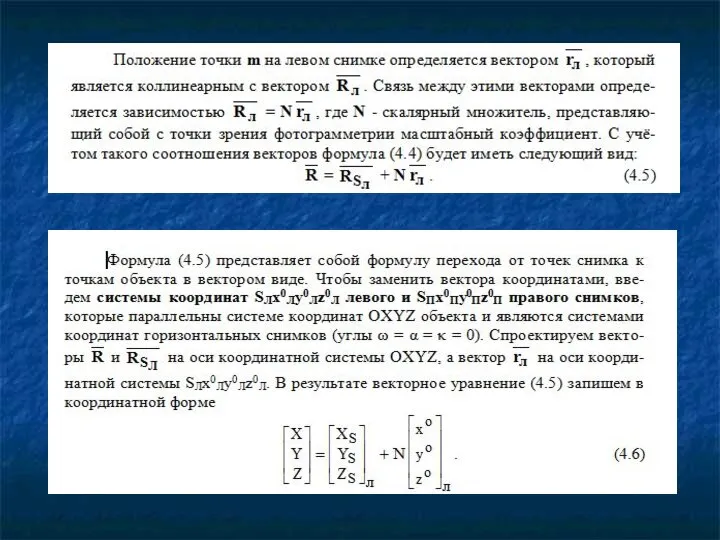
- 8. Преобразование координат из систем координат стереопары в систему координат объекта
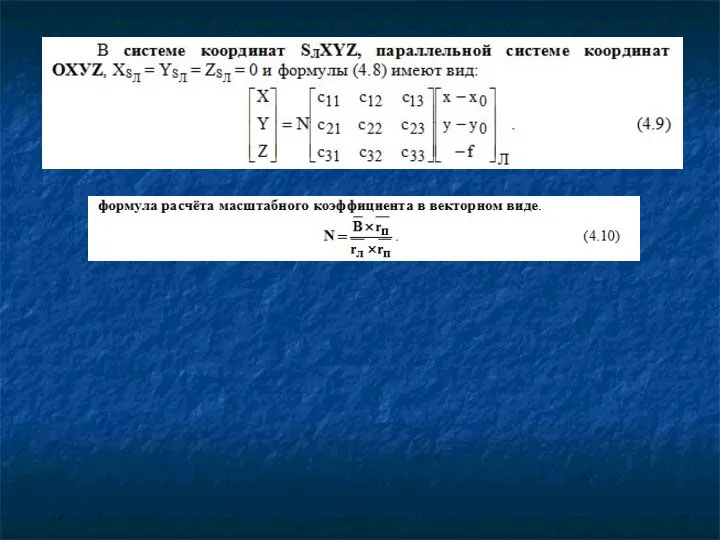
- 10. !!
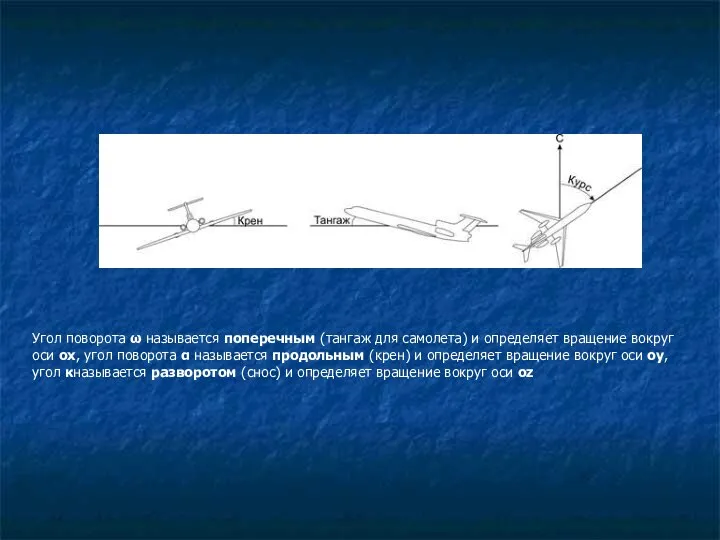
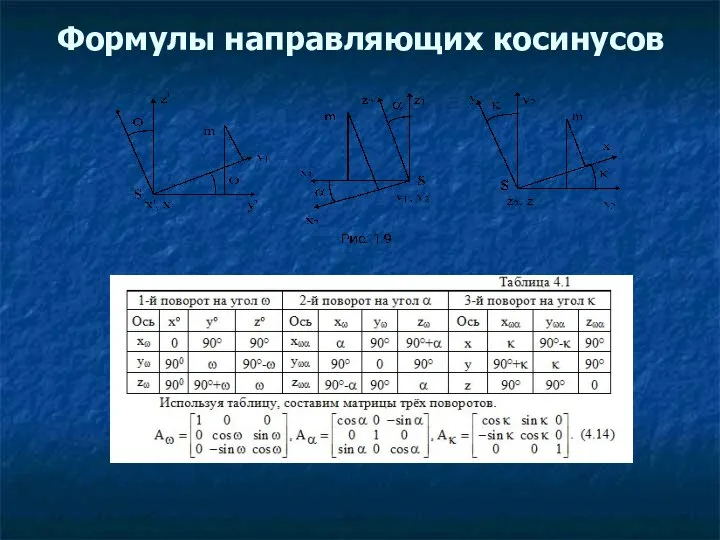
- 13. Угол поворота ω называется поперечным (тангаж для самолета) и определяет вращение вокруг оси ox, угол поворота
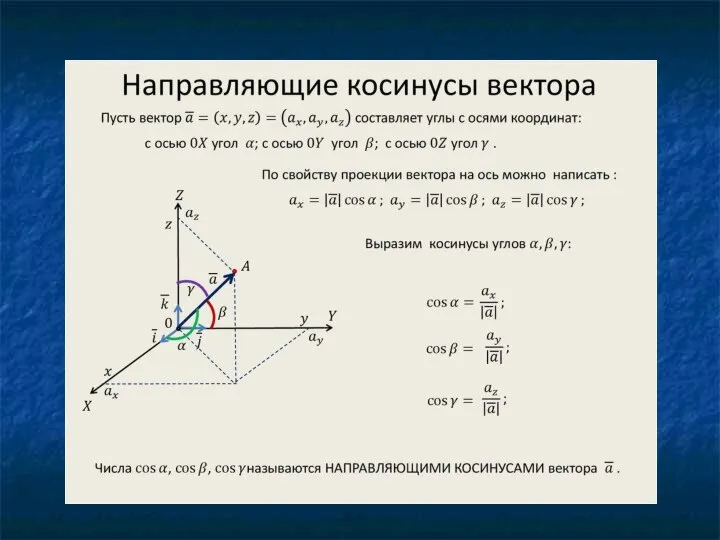
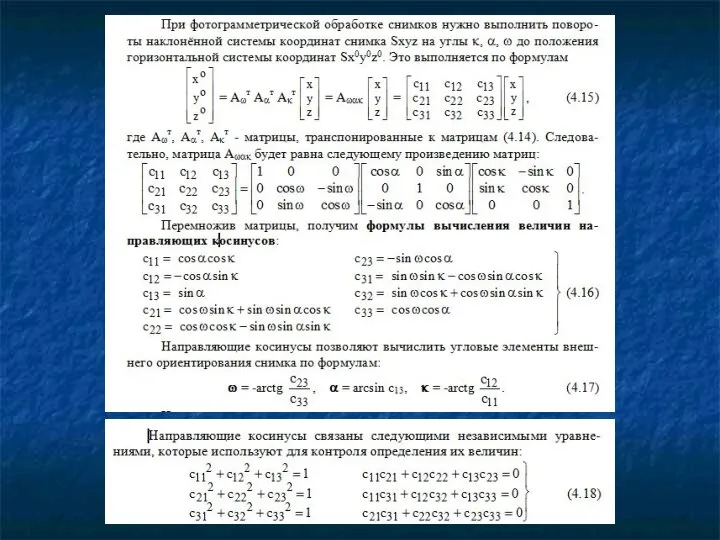
- 14. Формулы направляющих косинусов
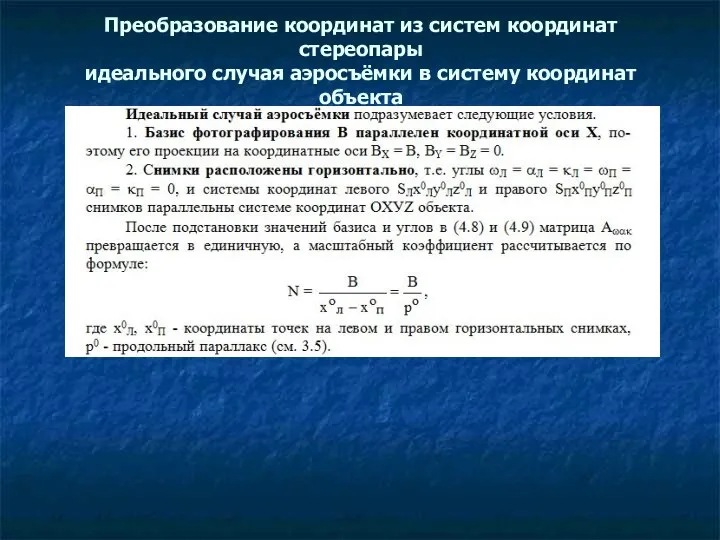
- 16. Преобразование координат из систем координат стереопары идеального случая аэросъёмки в систему координат объекта
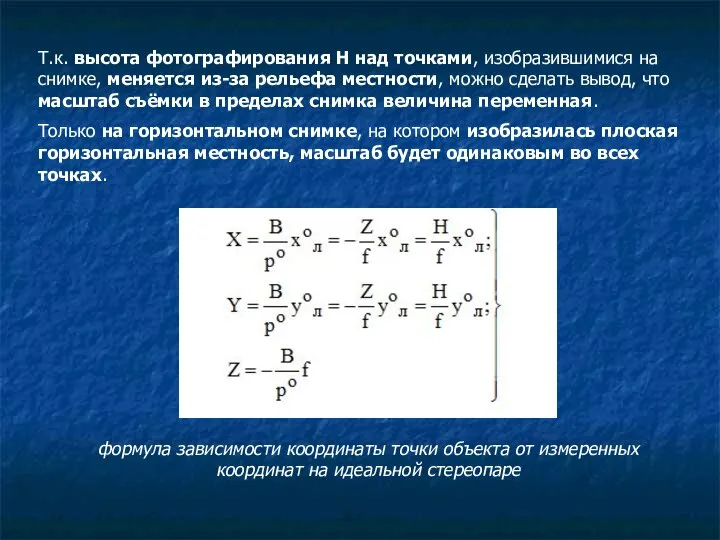
- 18. Т.к. высота фотографирования Н над точками, изобразившимися на снимке, меняется из-за рельефа местности, можно сделать вывод,
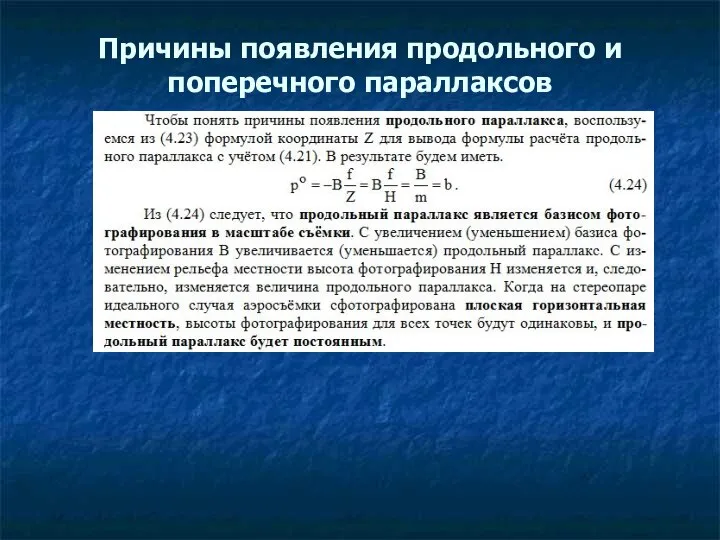
- 19. Причины появления продольного и поперечного параллаксов
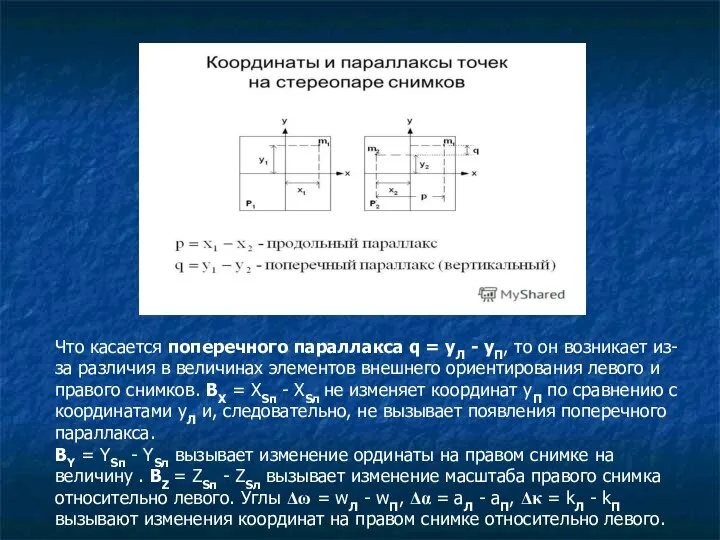
- 20. Что касается поперечного параллакса q = yЛ - yП, то он возникает из-за различия в величинах
- 24. Скачать презентацию
Слайд 3
Фотограмметрическая обработка снимков состоит из последовательных преобразований координат. На рис приведена цепочка
Фотограмметрическая обработка снимков состоит из последовательных преобразований координат. На рис приведена цепочка
Слайд 4Координаты точек стереопары и снимка можно преобразовать сразу в систему координат OXYZ
Координаты точек стереопары и снимка можно преобразовать сразу в систему координат OXYZ
Слайд 5Преобразование координат из системы координат сканера
в систему координат снимка с началом в
Преобразование координат из системы координат сканера в систему координат снимка с началом в
Слайд 7На втором этапе вычисленные координаты x, y, z = 0 дополняют элементами
На втором этапе вычисленные координаты x, y, z = 0 дополняют элементами
Слайд 8Преобразование координат из систем координат стереопары
в систему координат объекта
Преобразование координат из систем координат стереопары
в систему координат объекта
Слайд 10!!
!!
Слайд 13Угол поворота ω называется поперечным (тангаж для самолета) и определяет вращение вокруг оси ox, угол поворота α называется продольным (крен) и
Угол поворота ω называется поперечным (тангаж для самолета) и определяет вращение вокруг оси ox, угол поворота α называется продольным (крен) и
Слайд 14Формулы направляющих косинусов
Формулы направляющих косинусов
Слайд 16Преобразование координат из систем координат стереопары
идеального случая аэросъёмки в систему координат объекта
Преобразование координат из систем координат стереопары идеального случая аэросъёмки в систему координат объекта
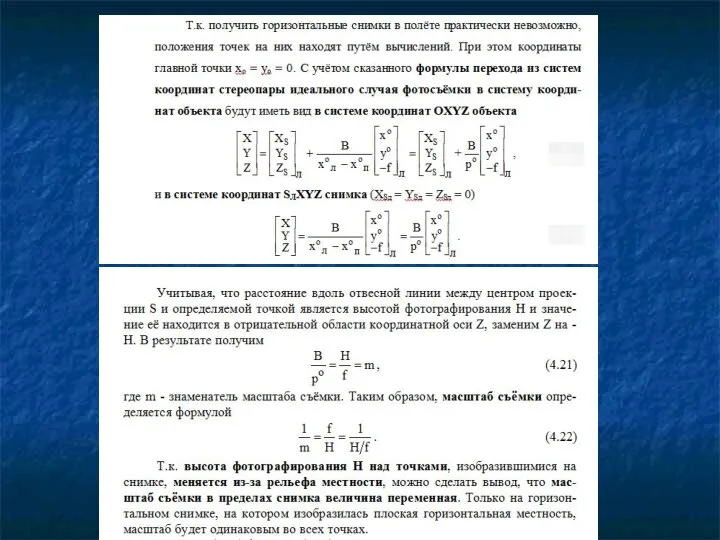
Слайд 18Т.к. высота фотографирования Н над точками, изобразившимися на снимке, меняется из-за рельефа
Т.к. высота фотографирования Н над точками, изобразившимися на снимке, меняется из-за рельефа
Слайд 19Причины появления продольного и поперечного параллаксов
Причины появления продольного и поперечного параллаксов
Слайд 20Что касается поперечного параллакса q = yЛ - yП, то он возникает
Что касается поперечного параллакса q = yЛ - yП, то он возникает
 Решение логических задач
Решение логических задач Prezentatsia_2
Prezentatsia_2 Теория вероятности в ЕГЭ . По математике примеры и решения
Теория вероятности в ЕГЭ . По математике примеры и решения Прямоугольник. Свойства. Признаки. Формулы. Определение. Тест. Задачи
Прямоугольник. Свойства. Признаки. Формулы. Определение. Тест. Задачи Математическая игра Петергофская мозаика 5 класс
Математическая игра Петергофская мозаика 5 класс Золотое сечение
Золотое сечение Решение иррациональных уравнений
Решение иррациональных уравнений Булева алгебра
Булева алгебра Функция
Функция Движение, 9 класс
Движение, 9 класс Проект по математике Задачи-расчеты из моей жизни
Проект по математике Задачи-расчеты из моей жизни Викторина по математике
Викторина по математике Цилиндр. Круговой цилиндр
Цилиндр. Круговой цилиндр Решение уравнений и неравенств с модулем
Решение уравнений и неравенств с модулем Квадратные неравенства (8 класс)
Квадратные неравенства (8 класс) Решение задач по теме Перпендикулярные прямые в пространстве
Решение задач по теме Перпендикулярные прямые в пространстве Кейс №2. Формализованные методы прогнозирования
Кейс №2. Формализованные методы прогнозирования Способы быстрого счета
Способы быстрого счета Дифференцирование функции y=f(kx+m)
Дифференцирование функции y=f(kx+m) Сложение и вычитание алгебраических дробей
Сложение и вычитание алгебраических дробей Полуправильные многогранники
Полуправильные многогранники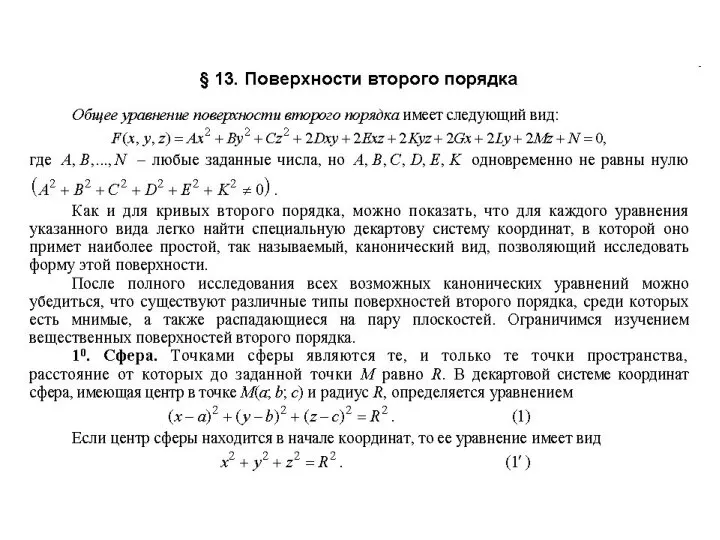 Поверхности второго порядка
Поверхности второго порядка Применение мультимедийных презентаций для организации устных упражнений на уроках математики в 5-6 классах. Модуль 1
Применение мультимедийных презентаций для организации устных упражнений на уроках математики в 5-6 классах. Модуль 1 Сравнение числовых выражений (Урок 30)
Сравнение числовых выражений (Урок 30) Понятие квадратного корня из неотрицательного числа
Понятие квадратного корня из неотрицательного числа Задачи с ветвлением. 8 класс
Задачи с ветвлением. 8 класс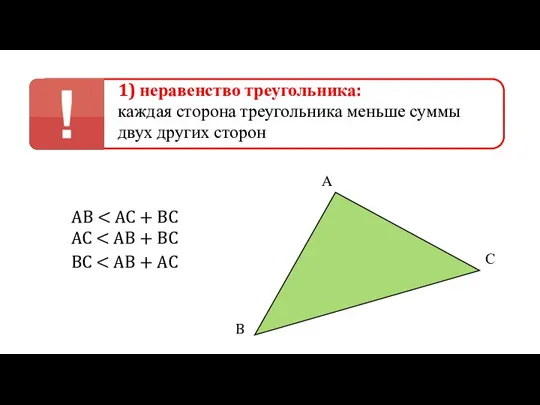 Трёхгранный угол
Трёхгранный угол Симметрия
Симметрия