- Интерфейсы при потере подвижности (лекция 1)

Содержание
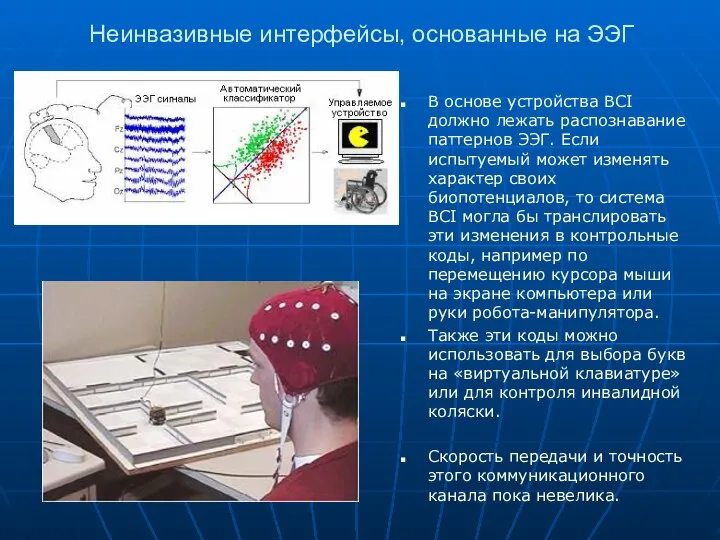
- 2. Неинвазивные интерфейсы, основанные на ЭЭГ В основе устройства BCI должно лежать распознавание паттернов ЭЭГ. Если испытуемый
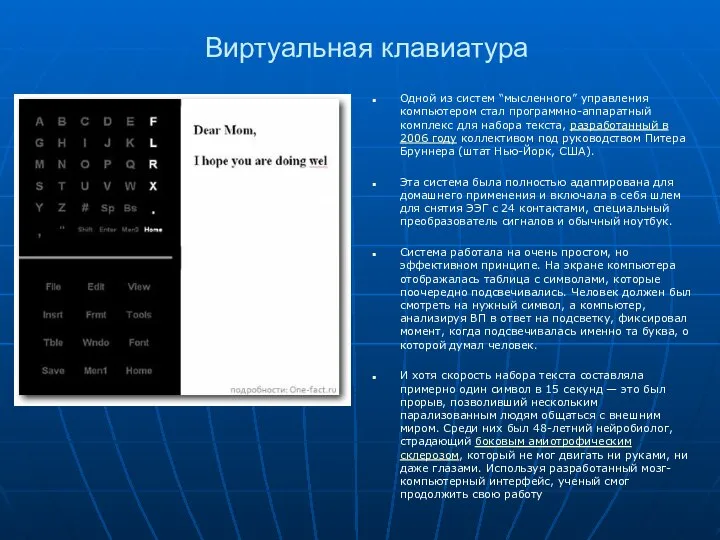
- 3. Виртуальная клавиатура Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для набора текста, разработанный в
- 4. Управление коляской http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
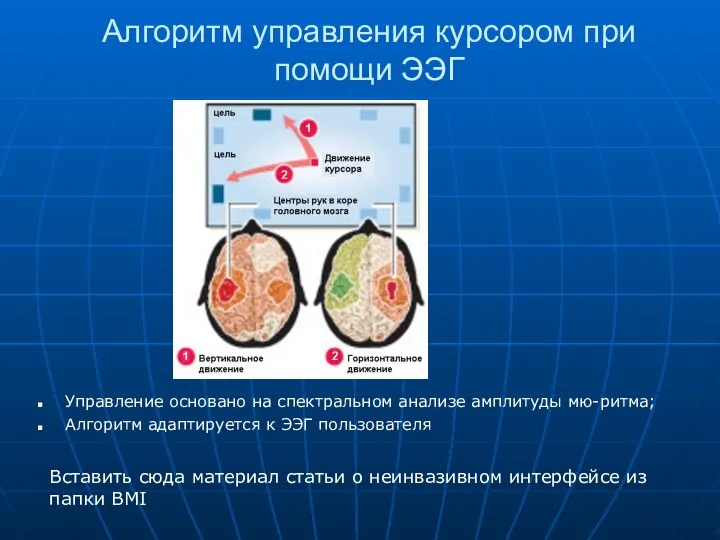
- 5. Алгоритм управления курсором при помощи ЭЭГ Управление основано на спектральном анализе амплитуды мю-ритма; Алгоритм адаптируется к
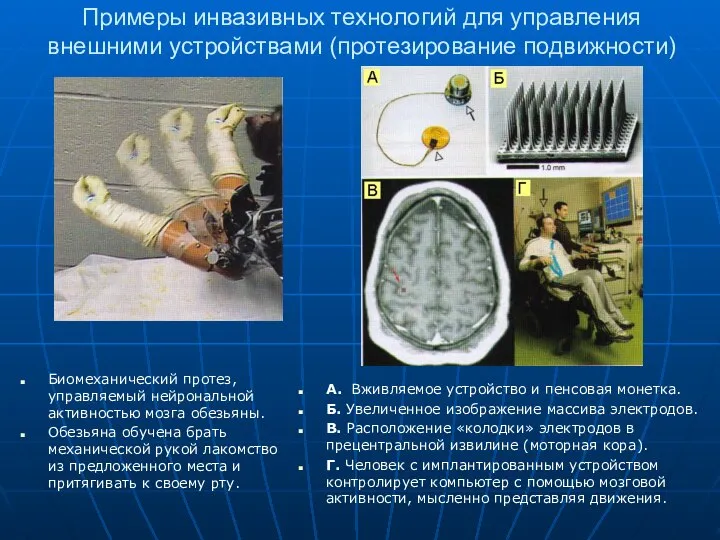
- 6. Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности) Биомеханический протез, управляемый нейрональной активностью мозга обезьяны.
- 7. Пациентка с роботизированной рукой http://science.compulenta.ru/728055/
- 8. Блок микроэлектродов с проводом на кончике указательного пальца Вставить сюда слайд о фирме Киберкинетикс
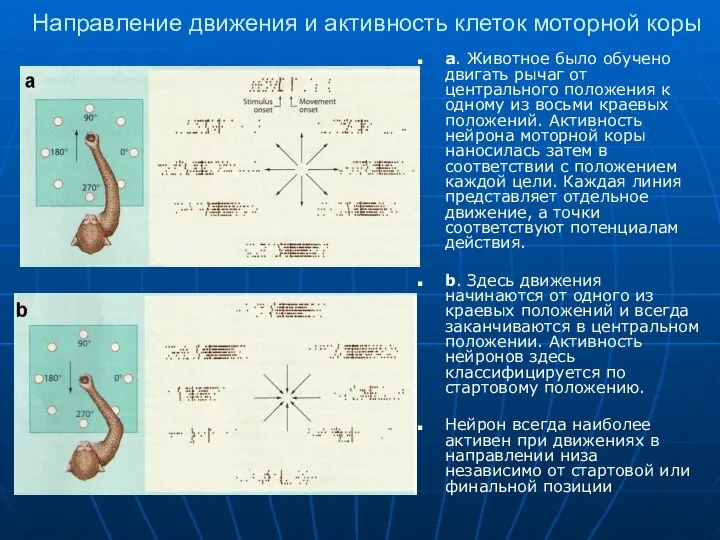
- 9. Направление движения и активность клеток моторной коры a. Животное было обучено двигать рычаг от центрального положения
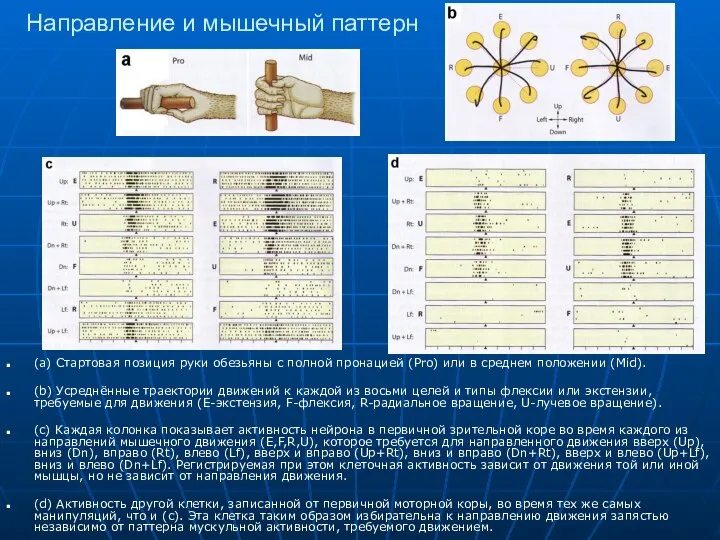
- 10. Направление и мышечный паттерн (a) Стартовая позиция руки обезьяны с полной пронацией (Pro) или в среднем
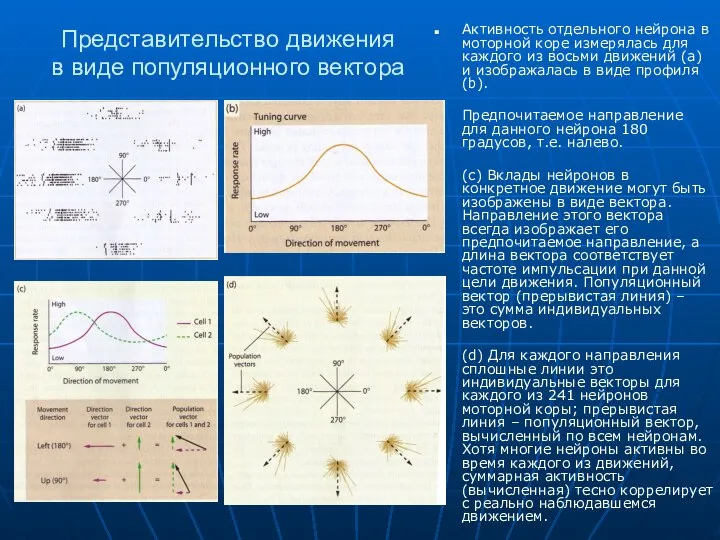
- 11. Представительство движения в виде популяционного вектора Активность отдельного нейрона в моторной коре измерялась для каждого из
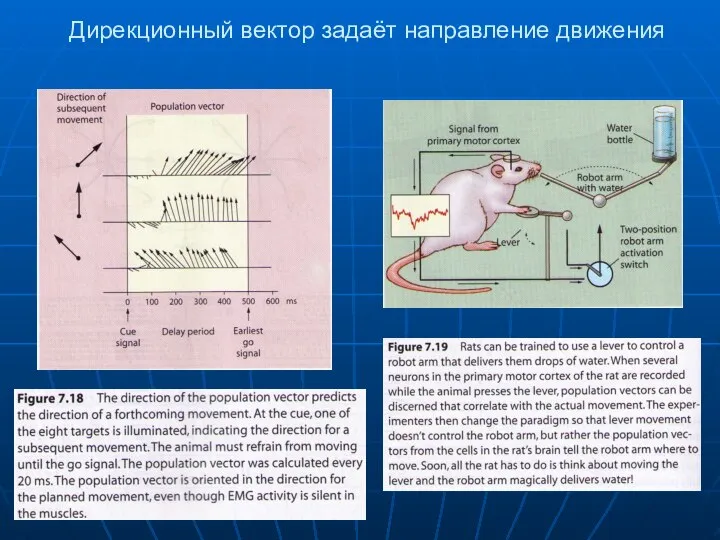
- 12. Дирекционный вектор задаёт направление движения
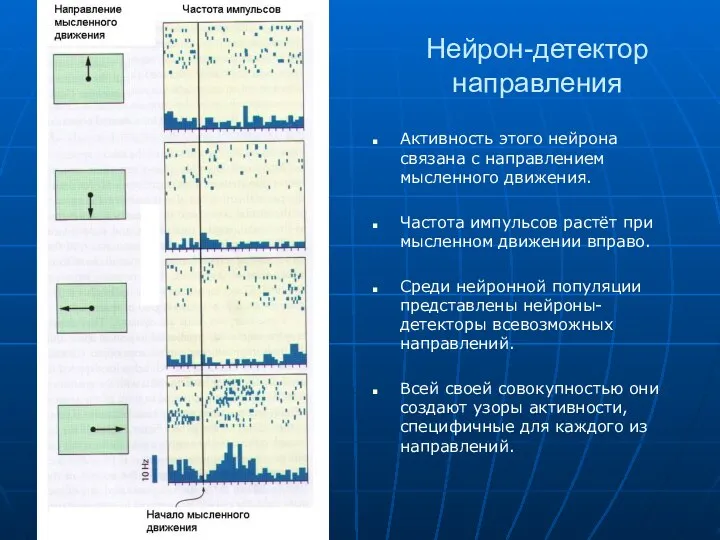
- 13. Нейрон-детектор направления Активность этого нейрона связана с направлением мысленного движения. Частота импульсов растёт при мысленном движении
- 15. Скачать презентацию
Слайд 2Неинвазивные интерфейсы, основанные на ЭЭГ
В основе устройства BCI должно лежать распознавание паттернов
Неинвазивные интерфейсы, основанные на ЭЭГ
В основе устройства BCI должно лежать распознавание паттернов
Слайд 3Виртуальная клавиатура
Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для набора
Виртуальная клавиатура
Одной из систем “мысленного” управления компьютером стал программно-аппаратный комплекс для набора
Слайд 4Управление коляской
http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
Управление коляской
http://one-fact.ru/1-human-fact/upravlenie-myslyu-ot-kompyutera-do-invalidnoj-kolyaski-i-robotov.html
Слайд 5Алгоритм управления курсором при помощи ЭЭГ
Управление основано на спектральном анализе амплитуды мю-ритма;
Алгоритм
Алгоритм управления курсором при помощи ЭЭГ
Управление основано на спектральном анализе амплитуды мю-ритма;
Алгоритм
Слайд 6Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности)
Биомеханический протез, управляемый нейрональной
Примеры инвазивных технологий для управления внешними устройствами (протезирование подвижности)
Биомеханический протез, управляемый нейрональной
Слайд 7Пациентка с роботизированной рукой
http://science.compulenta.ru/728055/
Пациентка с роботизированной рукой
http://science.compulenta.ru/728055/
Слайд 8Блок микроэлектродов с проводом на кончике указательного пальца
Вставить сюда слайд о фирме
Блок микроэлектродов с проводом на кончике указательного пальца
Вставить сюда слайд о фирме

Слайд 9Направление движения и активность клеток моторной коры
a. Животное было обучено двигать рычаг
Направление движения и активность клеток моторной коры
a. Животное было обучено двигать рычаг
Слайд 10Направление и мышечный паттерн
(a) Стартовая позиция руки обезьяны с полной пронацией (Pro)
Направление и мышечный паттерн
(a) Стартовая позиция руки обезьяны с полной пронацией (Pro)
Слайд 11Представительство движения
в виде популяционного вектора
Активность отдельного нейрона в моторной коре измерялась
Представительство движения
в виде популяционного вектора
Активность отдельного нейрона в моторной коре измерялась
Слайд 12Дирекционный вектор задаёт направление движения
Дирекционный вектор задаёт направление движения
Слайд 13Нейрон-детектор направления
Активность этого нейрона связана с направлением мысленного движения.
Частота импульсов растёт при
Нейрон-детектор направления
Активность этого нейрона связана с направлением мысленного движения.
Частота импульсов растёт при
 Potrebnost_v_pitanii_vode
Potrebnost_v_pitanii_vode Натуральное жаропонижающее Флю стоп+
Натуральное жаропонижающее Флю стоп+ Абсцессы и флегмоны ЧЛО
Абсцессы и флегмоны ЧЛО Научное обоснование ограничений жизнедеятельности инвалидов, страдающих офтальмопатологией
Научное обоснование ограничений жизнедеятельности инвалидов, страдающих офтальмопатологией Тірек-қимыл аппараты ісіктерінің сәулелік диагностикасы
Тірек-қимыл аппараты ісіктерінің сәулелік диагностикасы Лекарственный формуляр детского инфекционного отделения
Лекарственный формуляр детского инфекционного отделения Медицинская аптечка первой помощи
Медицинская аптечка первой помощи Эпидемии в мировой истории
Эпидемии в мировой истории Анализы крови
Анализы крови Теоретические основы психологии лиц с нарушениями опорно-двигательного аппарата
Теоретические основы психологии лиц с нарушениями опорно-двигательного аппарата ЗОЖ - здоровый образ жизни
ЗОЖ - здоровый образ жизни Профилактика плоскостопия
Профилактика плоскостопия Медициналық бикенің жеке бас гигиенасы. Қорғаныс киімдерін қолдану ережелері
Медициналық бикенің жеке бас гигиенасы. Қорғаныс киімдерін қолдану ережелері Вміст природних антиоксидантів у харчовому раціоні учнів середнього шкільного віку
Вміст природних антиоксидантів у харчовому раціоні учнів середнього шкільного віку Ауылдағы медицина дамыту бойынша негізгі проблемалары
Ауылдағы медицина дамыту бойынша негізгі проблемалары Поль Брегг. Герберт Шелтон. Лечебное голодание
Поль Брегг. Герберт Шелтон. Лечебное голодание ЗОЖ. Проблема здоровья дошкольников
ЗОЖ. Проблема здоровья дошкольников Нейротоксикология
Нейротоксикология Техника прокола рубца, сычуга и книжки у жвачных животных
Техника прокола рубца, сычуга и книжки у жвачных животных Гигиенические требования к организации, оборудованию и содержанию детских и подростковых учреждений
Гигиенические требования к организации, оборудованию и содержанию детских и подростковых учреждений Субъекты инклюзивного образования
Субъекты инклюзивного образования Пероксисомные болезни
Пероксисомные болезни Гнойные заболевания железистых органов
Гнойные заболевания железистых органов Гестозы
Гестозы Жарақаттың түрлері
Жарақаттың түрлері Травмы мочевого пузыря и уретры
Травмы мочевого пузыря и уретры Мочевыделительная система
Мочевыделительная система Бронхоэктатическая болезнь у детей
Бронхоэктатическая болезнь у детей