- Аттестационная робота. Проектирование и диагностирование легкотестируемых конечных автоматов

Содержание
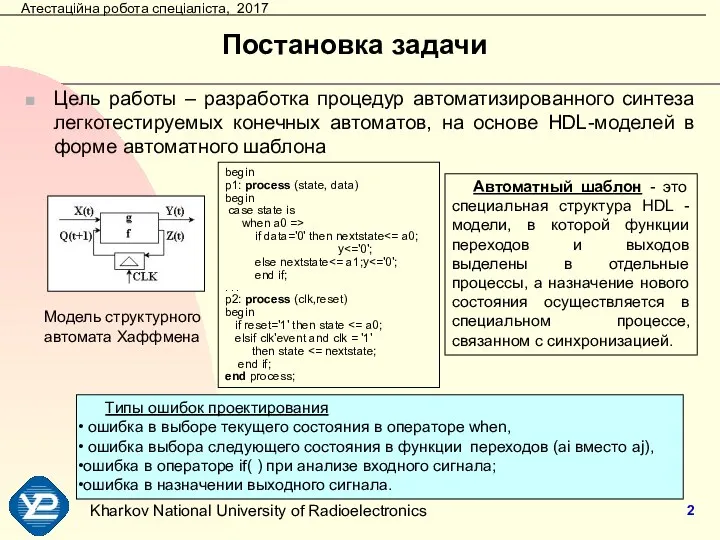
- 2. Постановка задачи Цель работы – разработка процедур автоматизированного синтеза легкотестируемых конечных автоматов, на основе HDL-моделей в
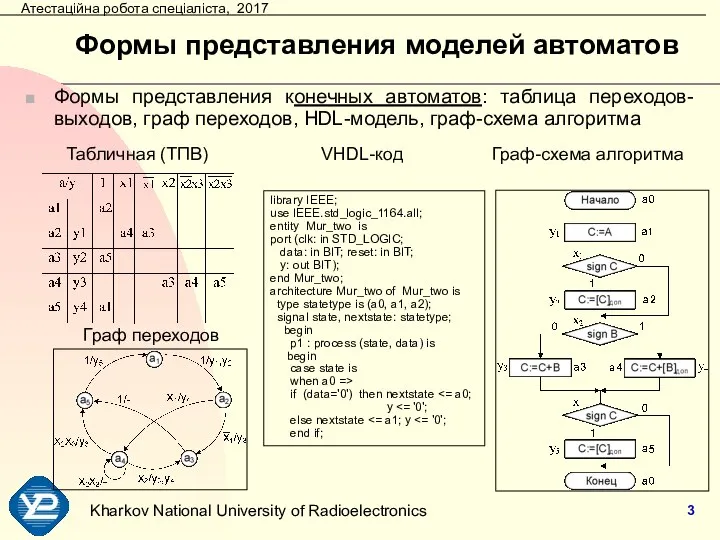
- 3. Формы представления моделей автоматов Формы представления конечных автоматов: таблица переходов-выходов, граф переходов, HDL-модель, граф-схема алгоритма library
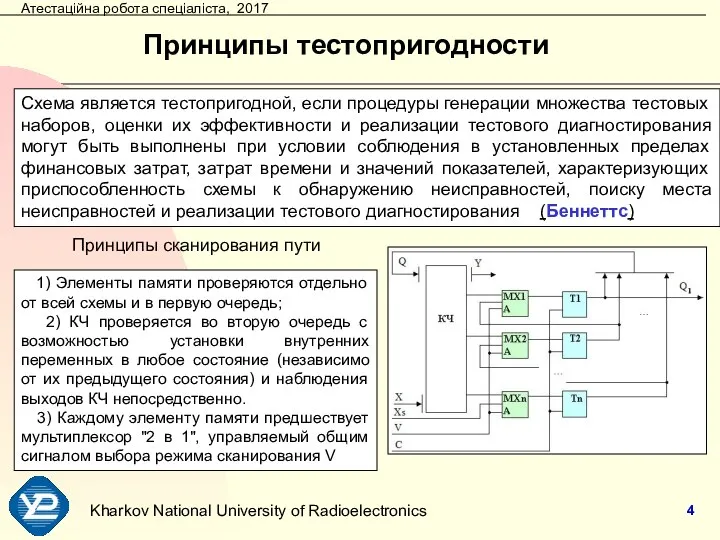
- 4. Принципы тестопригодности Схема является тестопригодной, если процедуры генерации множества тестовых наборов, оценки их эффективности и реализации
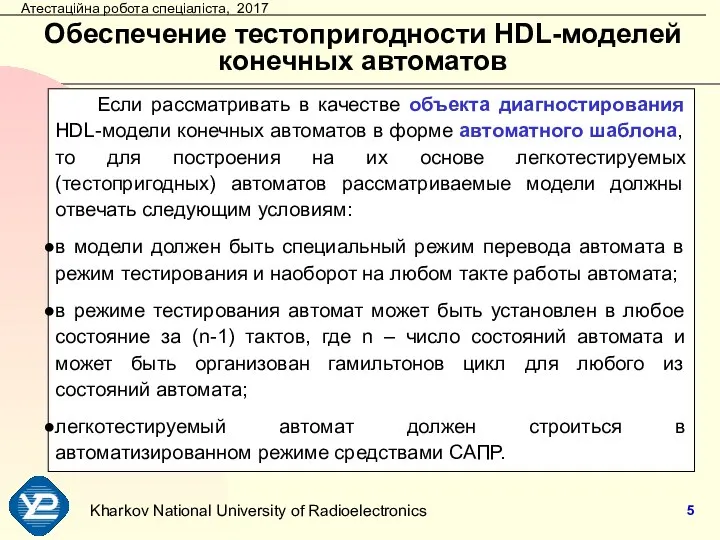
- 5. Обеспечение тестопригодности HDL-моделей конечных автоматов Если рассматривать в качестве объекта диагностирования HDL-модели конечных автоматов в форме
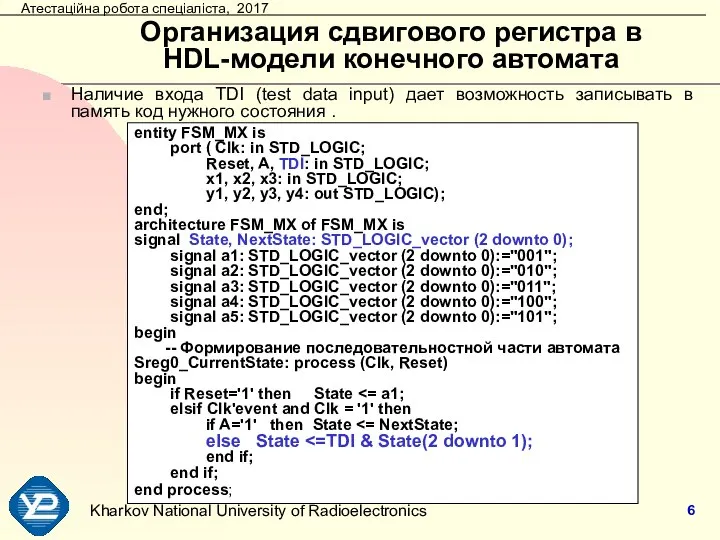
- 6. Организация сдвигового регистра в HDL-модели конечного автомата Наличие входа TDI (test data input) дает возможность записывать
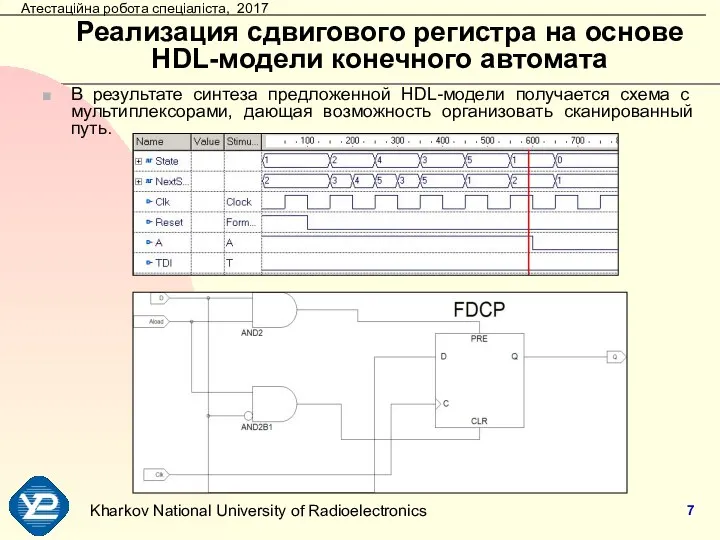
- 7. Реализация сдвигового регистра на основе HDL-модели конечного автомата В результате синтеза предложенной HDL-модели получается схема с
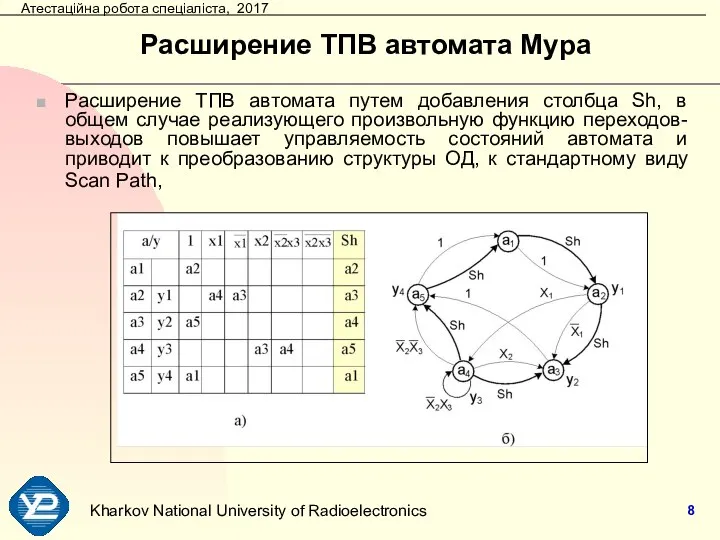
- 8. Расширение ТПВ автомата Мура Расширение TПB автомата путем добавления столбца Sh, в общем случае реализующего произвольную
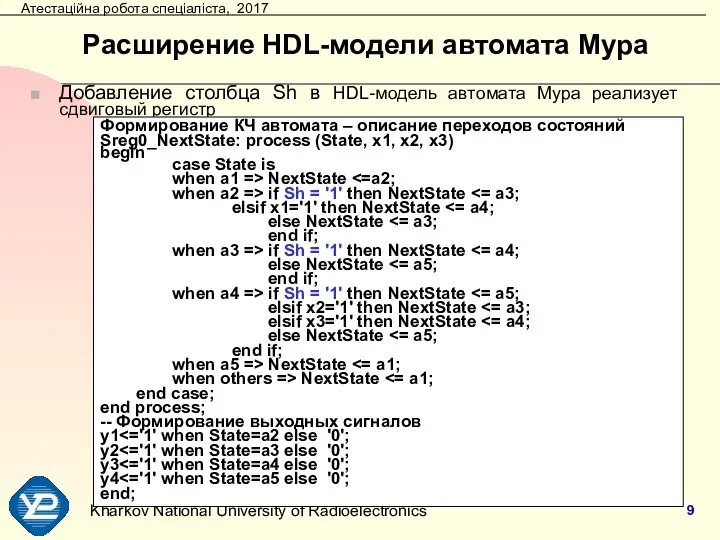
- 9. Расширение HDL-модели автомата Мура Добавление столбца Sh в HDL-модель автомата Мура реализует сдвиговый регистр Формирование КЧ
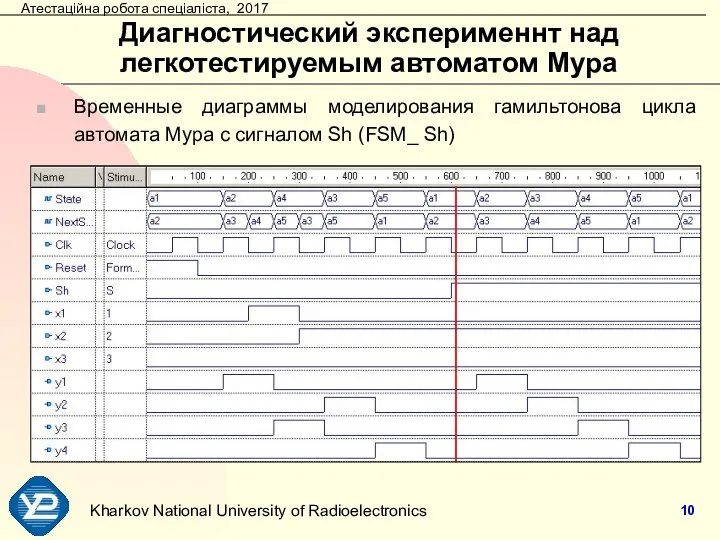
- 10. Диагностический эксперименнт над легкотестируемым автоматом Мура Временные диаграммы моделирования гамильтонова цикла автомата Мура с сигналом Sh
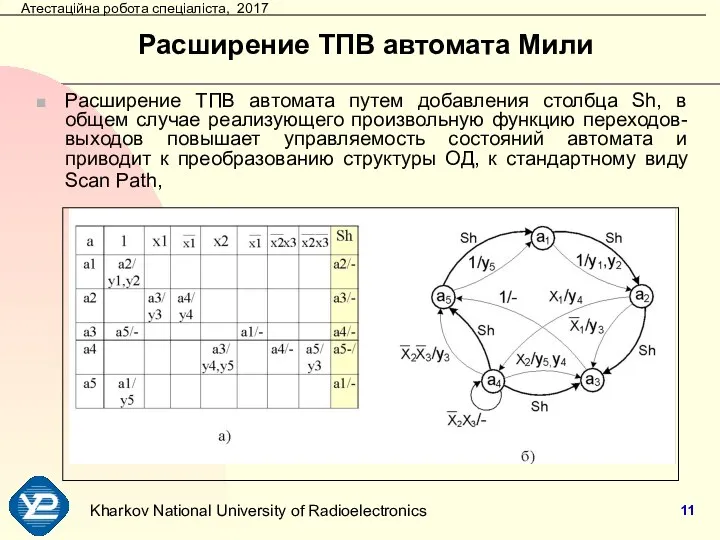
- 11. Расширение ТПВ автомата Мили Расширение TПB автомата путем добавления столбца Sh, в общем случае реализующего произвольную
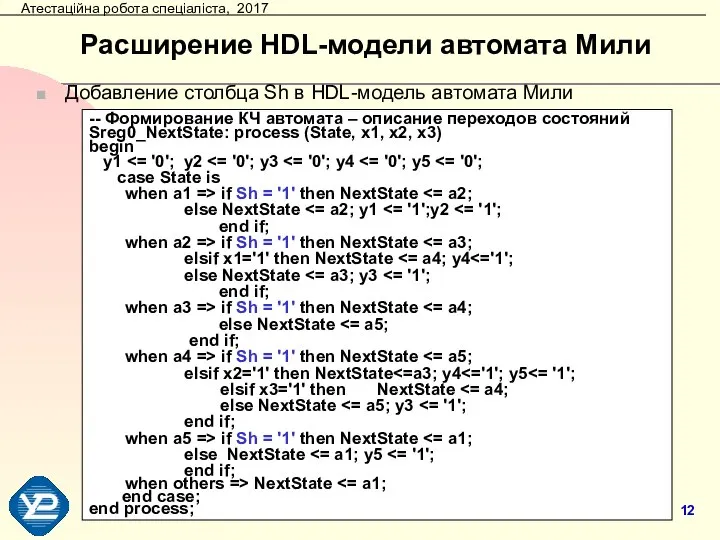
- 12. Расширение HDL-модели автомата Мили Добавление столбца Sh в HDL-модель автомата Мили -- Формирование КЧ автомата –
- 13. Схемная реализация легкотестируемого автомата Используемое устройство: плата Spartan 3E, микросхема FPGA XC3S500E, Package FG 320. Пакет
- 14. Диагностические эксперименты над автоматами Входная последовательность X называется отличительной для автомата A (X,Y,Z,δ,λ), если выходная последовательность
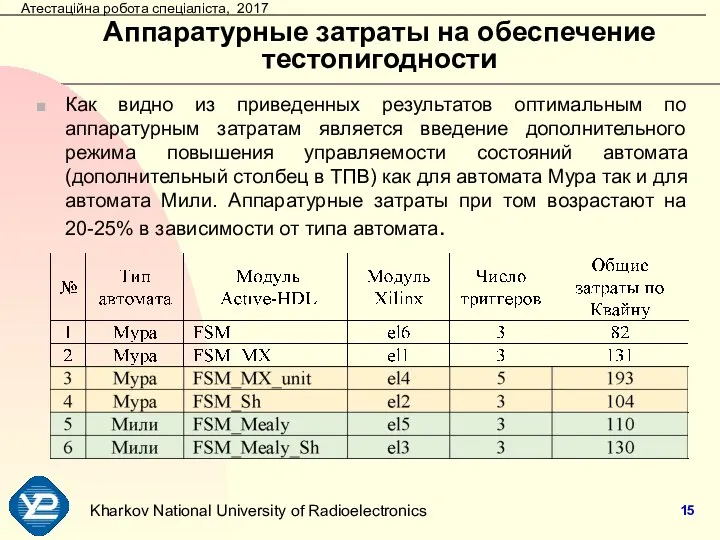
- 15. Аппаратурные затраты на обеспечение тестопигодности Как видно из приведенных результатов оптимальным по аппаратурным затратам является введение
- 17. Скачать презентацию
Слайд 2Постановка задачи
Цель работы – разработка процедур автоматизированного синтеза легкотестируемых конечных автоматов, на
Постановка задачи
Цель работы – разработка процедур автоматизированного синтеза легкотестируемых конечных автоматов, на
Слайд 3Формы представления моделей автоматов
Формы представления конечных автоматов: таблица переходов-выходов, граф переходов, HDL-модель,
Формы представления моделей автоматов
Формы представления конечных автоматов: таблица переходов-выходов, граф переходов, HDL-модель,
Слайд 4Принципы тестопригодности
Схема является тестопригодной, если процедуры генерации множества тестовых наборов, оценки их
Принципы тестопригодности
Схема является тестопригодной, если процедуры генерации множества тестовых наборов, оценки их
Слайд 5Обеспечение тестопригодности HDL-моделей конечных автоматов
Если рассматривать в качестве объекта диагностирования
Обеспечение тестопригодности HDL-моделей конечных автоматов
Если рассматривать в качестве объекта диагностирования
Слайд 6Организация сдвигового регистра в HDL-модели конечного автомата
Наличие входа TDI (test data
Организация сдвигового регистра в HDL-модели конечного автомата
Наличие входа TDI (test data
Слайд 7Реализация сдвигового регистра на основе HDL-модели конечного автомата
В результате синтеза предложенной
Реализация сдвигового регистра на основе HDL-модели конечного автомата
В результате синтеза предложенной
Слайд 8Расширение ТПВ автомата Мура
Расширение TПB автомата путем добавления столбца Sh, в общем
Расширение ТПВ автомата Мура
Расширение TПB автомата путем добавления столбца Sh, в общем
Слайд 9Расширение HDL-модели автомата Мура
Добавление столбца Sh в HDL-модель автомата Мура реализует сдвиговый
Расширение HDL-модели автомата Мура
Добавление столбца Sh в HDL-модель автомата Мура реализует сдвиговый
Слайд 10Диагностический эксперименнт над легкотестируемым автоматом Мура
Временные диаграммы моделирования гамильтонова цикла автомата Мура
Диагностический эксперименнт над легкотестируемым автоматом Мура
Временные диаграммы моделирования гамильтонова цикла автомата Мура
Слайд 11Расширение ТПВ автомата Мили
Расширение TПB автомата путем добавления столбца Sh, в общем
Расширение ТПВ автомата Мили
Расширение TПB автомата путем добавления столбца Sh, в общем
Слайд 12Расширение HDL-модели автомата Мили
Добавление столбца Sh в HDL-модель автомата Мили
-- Формирование КЧ
Расширение HDL-модели автомата Мили
Добавление столбца Sh в HDL-модель автомата Мили
-- Формирование КЧ
Слайд 13Схемная реализация легкотестируемого автомата
Используемое устройство: плата Spartan 3E, микросхема FPGA XC3S500E, Package
Схемная реализация легкотестируемого автомата
Используемое устройство: плата Spartan 3E, микросхема FPGA XC3S500E, Package

Слайд 14Диагностические эксперименты над автоматами
Входная последовательность X называется отличительной для автомата A (X,Y,Z,δ,λ),
Диагностические эксперименты над автоматами
Входная последовательность X называется отличительной для автомата A (X,Y,Z,δ,λ),
Слайд 15Аппаратурные затраты на обеспечение тестопигодности
Как видно из приведенных результатов оптимальным по аппаратурным
Аппаратурные затраты на обеспечение тестопигодности
Как видно из приведенных результатов оптимальным по аппаратурным
 Формирование и организация работы команды для решения профессиональных задач
Формирование и организация работы команды для решения профессиональных задач Когда учиться интересно?
Когда учиться интересно? Фокина Лидия Петровна. Общие сведения об учителе
Фокина Лидия Петровна. Общие сведения об учителе Повышение интереса у учащихся 6, 7 классов к истории народных кукол в кружке Кукольная мастерская
Повышение интереса у учащихся 6, 7 классов к истории народных кукол в кружке Кукольная мастерская Викторина Мульти-Пульти
Викторина Мульти-Пульти Муниципальный социальный проект Книги-юбиляры
Муниципальный социальный проект Книги-юбиляры Сделай сам. Кружок
Сделай сам. Кружок Окружающий мир
Окружающий мир Учебная компетентность
Учебная компетентность Жители зоопарка. Оригами
Жители зоопарка. Оригами Методы упорядочения и объединения объектов
Методы упорядочения и объединения объектов Презентация на тему Первые уроки школьной отметки (2 класс)
Презентация на тему Первые уроки школьной отметки (2 класс)  Я - исследователь
Я - исследователь Речевое развитие дошкольников в условиях реализации образовательной программы ДОУ
Речевое развитие дошкольников в условиях реализации образовательной программы ДОУ Лето
Лето Наше первое исследование: Овес на подоконнике
Наше первое исследование: Овес на подоконнике Внеклассное занятие
Внеклассное занятие Зимняя прогулка. 12 отличий
Зимняя прогулка. 12 отличий Решение проблемных задач с целью активизации познавательной деятельности на уроках истории
Решение проблемных задач с целью активизации познавательной деятельности на уроках истории Отчет-презентация о прогулке-походе в зимний лес Ах ты, зимушка-зима
Отчет-презентация о прогулке-походе в зимний лес Ах ты, зимушка-зима Проектная деятельность в школе. Часть 1
Проектная деятельность в школе. Часть 1 Педсовет под ключ
Педсовет под ключ Автоматизация звука [Р] в стихотворных текстах. Речевой материал в картинках
Автоматизация звука [Р] в стихотворных текстах. Речевой материал в картинках Наша дружная семья
Наша дружная семья Портфолио педагога-психолога Шишиной Анастасии Петровны
Портфолио педагога-психолога Шишиной Анастасии Петровны Буллинг в школьной сфере
Буллинг в школьной сфере Дидактическая игра в педагогическом процессе детского сада
Дидактическая игра в педагогическом процессе детского сада Цвета цветика
Цвета цветика