- Дискретизация. Антиалиасинг. Геометрические преобразования растровых изображений

Содержание
- 2. Содержание Дискретизация Частотная область Гребенчатый фильтр Теорема Найквиста-Котельникова Дискретизация аналогового сигнала Ряд Котельникова и Ряд Уиттакера
- 3. Дискретизация Этот раздел посвящен проблемам представления непрерывного двумерного цветового сигнала, которым является изображение, на дискретной растровой
- 4. Обработка сигналов Наиболее корректно рассматривать возникающие проблемы в рамках теории обработки сигналов (англ. signal processing). Двумерное
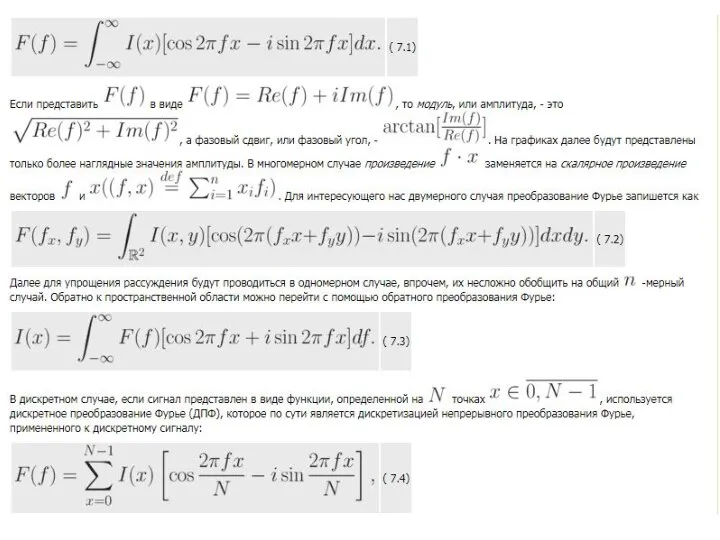
- 5. Частотная область Сигналы рассматривают как в пространственной области (англ. spatial domain) - это обычная область определения
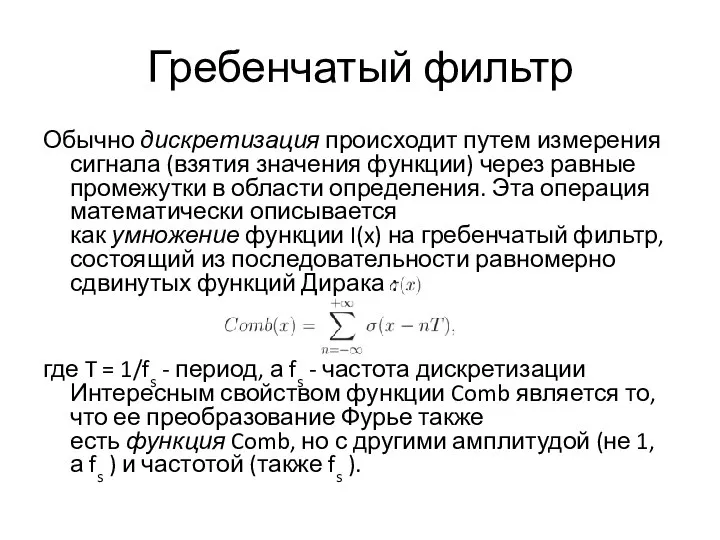
- 7. Гребенчатый фильтр Обычно дискретизация происходит путем измерения сигнала (взятия значения функции) через равные промежутки в области
- 8. Теорема Найквиста-Котельникова Теорема Найквиста-Котельникова дает ответ на вопрос, какой частоты дискретизации fs достаточно для того, чтобы
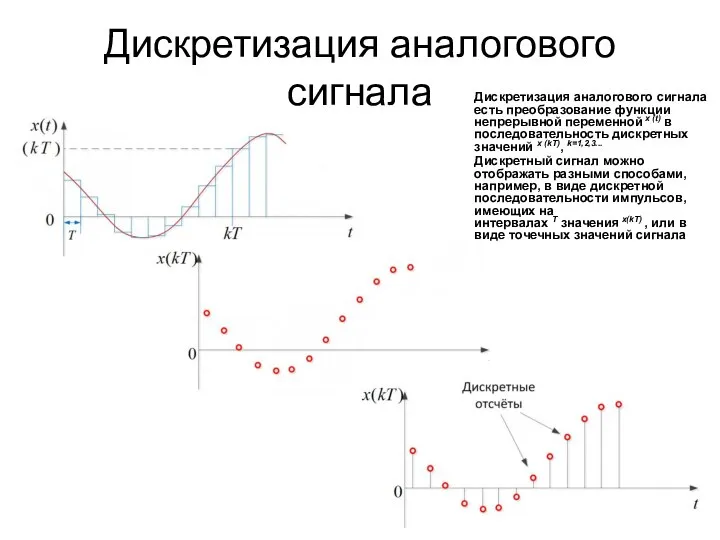
- 9. Дискретизация аналогового сигнала Дискретизация аналогового сигнала есть преобразование функции непрерывной переменной x (t) в последовательность дискретных
- 10. Ряд Котельникова Члены ряда Котельникова представляют собой функции отсчётов, сдвинутых друг относительно друга по времени на
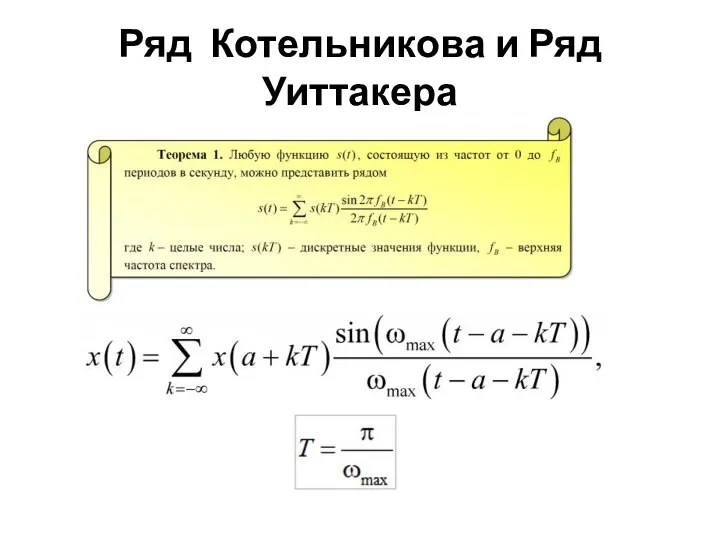
- 11. Ряд Котельникова и Ряд Уиттакера
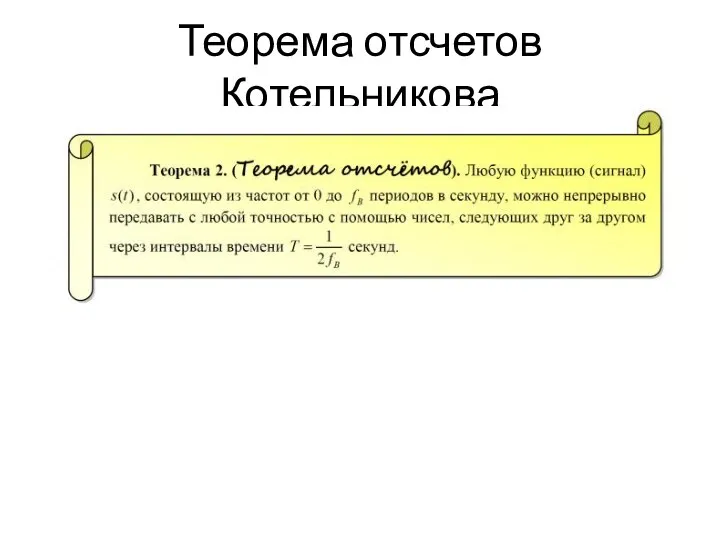
- 12. Теорема отсчетов Котельникова
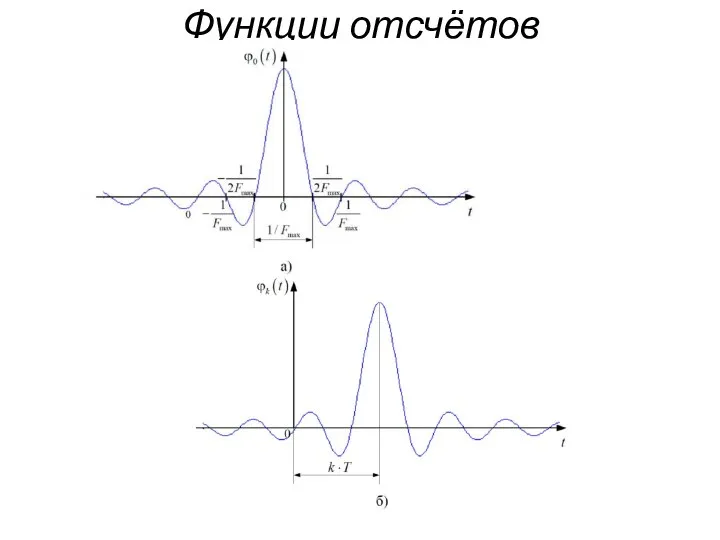
- 13. Функции отсчётов
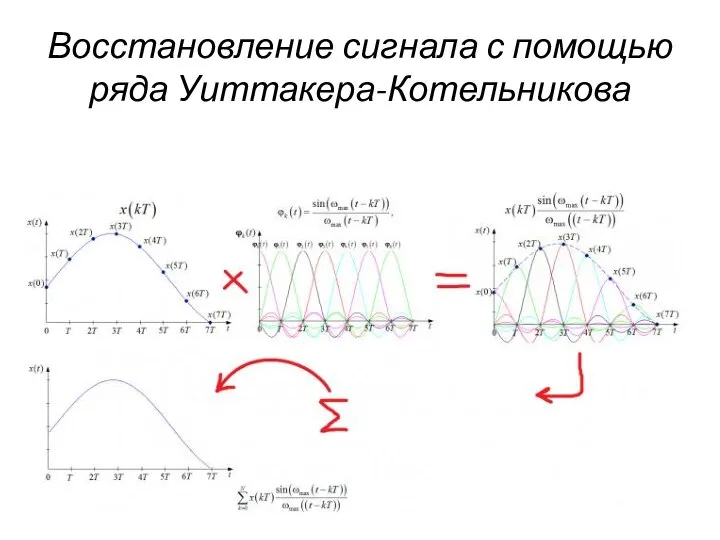
- 14. Восстановление сигнала с помощью ряда Уиттакера-Котельникова
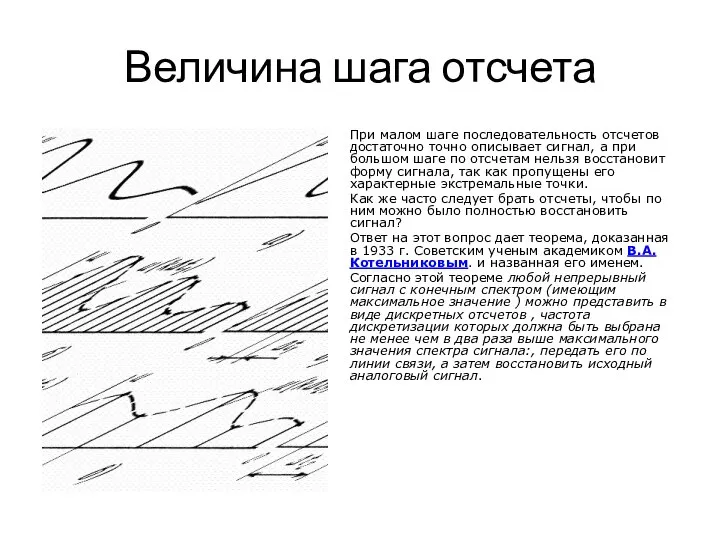
- 15. Величина шага отсчета При малом шаге последовательность отсчетов достаточно точно описывает сигнал, а при большом шаге
- 16. Физический смысл теоремы Котельникова. Теорема Котельникова утверждает, что если требуется передать непрерывный сигнал с ограниченным спектром
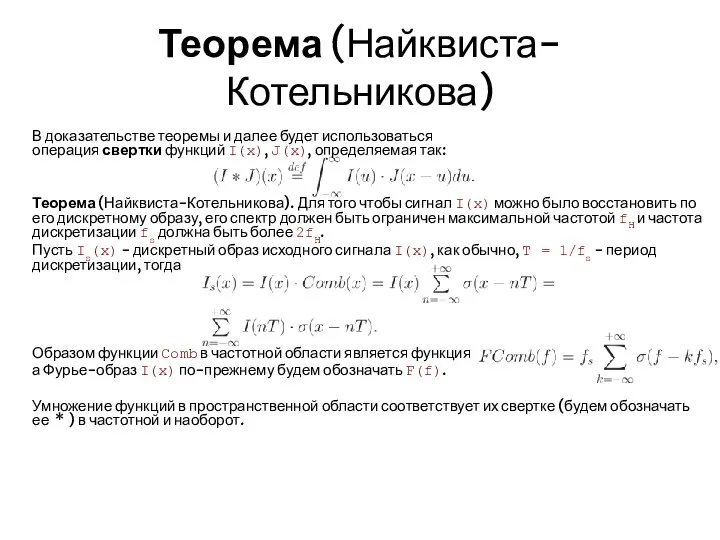
- 17. Теорема (Найквиста-Котельникова) В доказательстве теоремы и далее будет использоваться операция свертки функций I(x), J(x), определяемая так:
- 18. Теорема Соответственно, рассмотрим свертку F и FComb, являющуюся Фурье-образом Is(x) (обозначим его Fs(f) ): (*) где
- 19. Интерполяционная формула Найквиста-Шеннона Применив обратное преобразование Фурье к получим функцию Применив свертку с Is(x), получаем где
- 20. Пример Для завершения доказательства осталось показать, что невозможно однозначно восстановить сигнал при . Приведем соответствующий пример.
- 21. Пример не однозначности образа Рассмотрим две функции, Фурье-образы которых равны (функция однозначно задается своим Фурье-образом). При
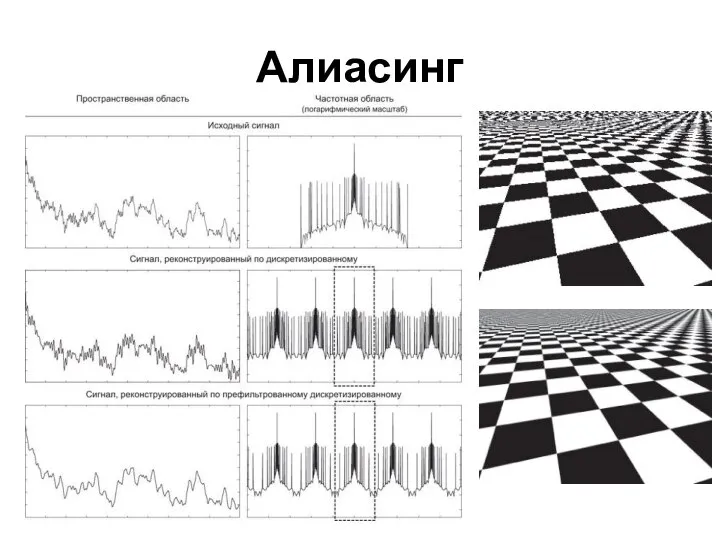
- 22. Искажение сигнала и борьба с этим эффектом Как было показано при доказательстве теоремы Найквиста-Котельникова, при недостаточной
- 23. Алиасинг
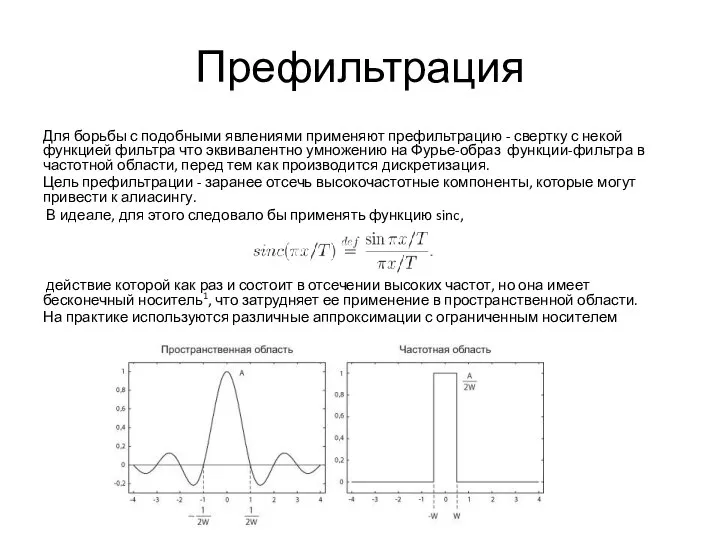
- 24. Префильтрация Для борьбы с подобными явлениями применяют префильтрацию - свертку с некой функцией фильтра что эквивалентно
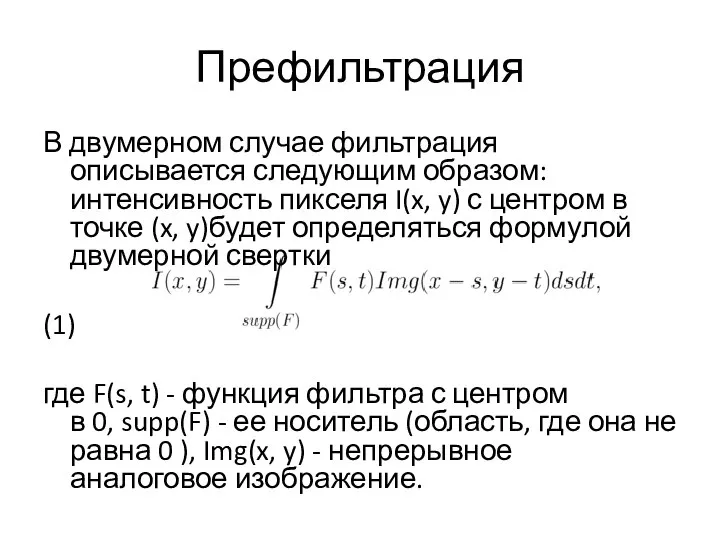
- 25. Префильтрация В двумерном случае фильтрация описывается следующим образом: интенсивность пикселя I(x, y) с центром в точке
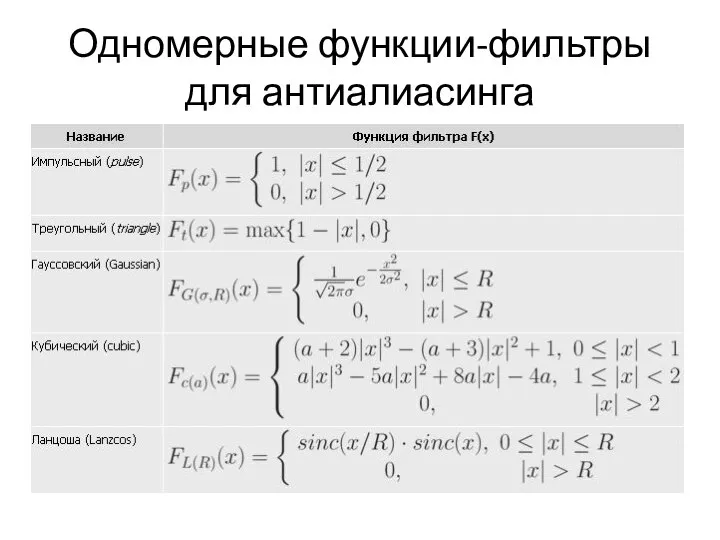
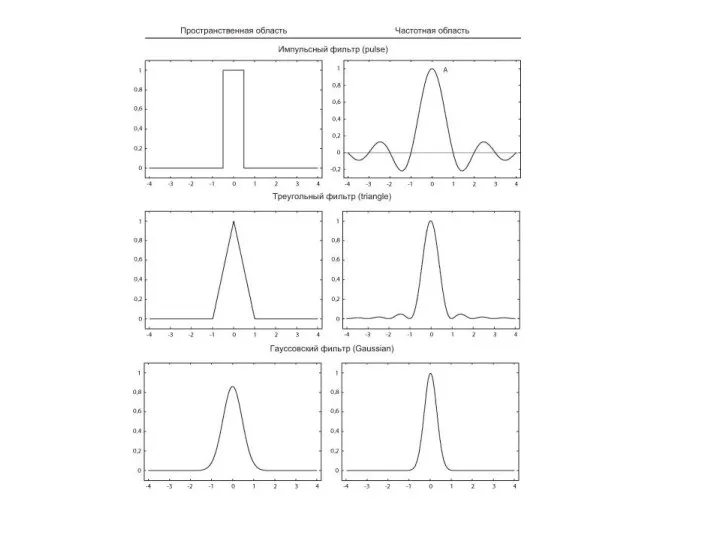
- 26. Одномерные функции-фильтры для антиалиасинга
- 27. Комментарий Гауссовский фильтр обычно применяется с (так он лучше всего приближает sinc в частотной области), R
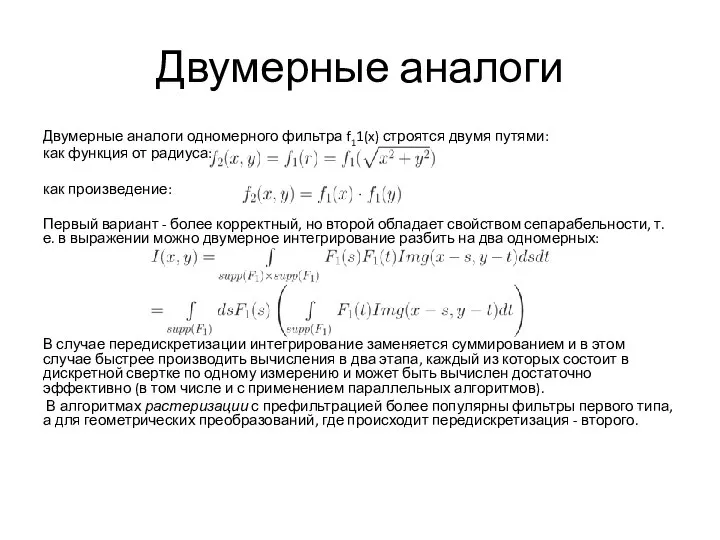
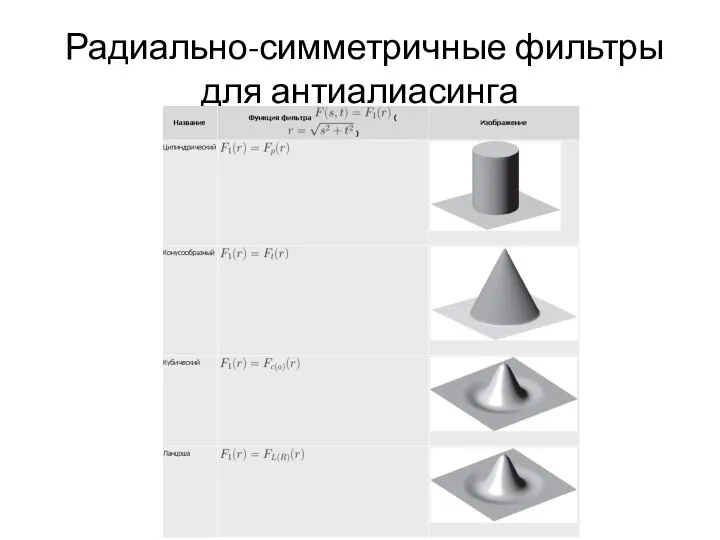
- 30. Двумерные аналоги Двумерные аналоги одномерного фильтра f11(x) строятся двумя путями: как функция от радиуса: как произведение:
- 31. Радиально-симметричные фильтры для антиалиасинга
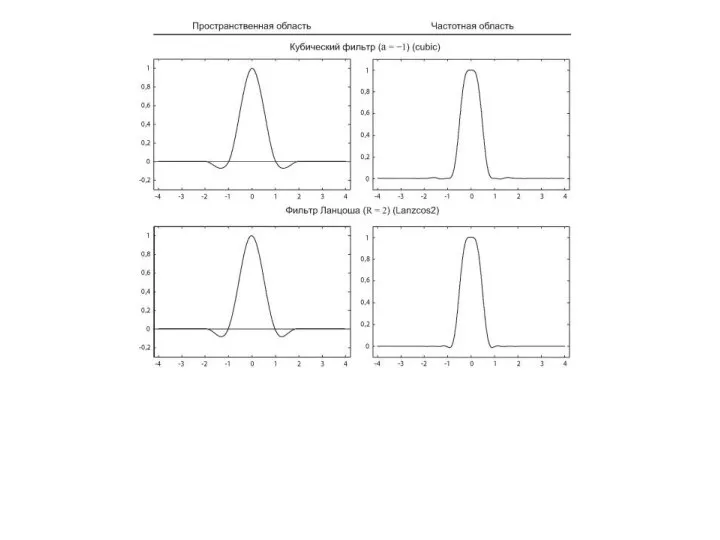
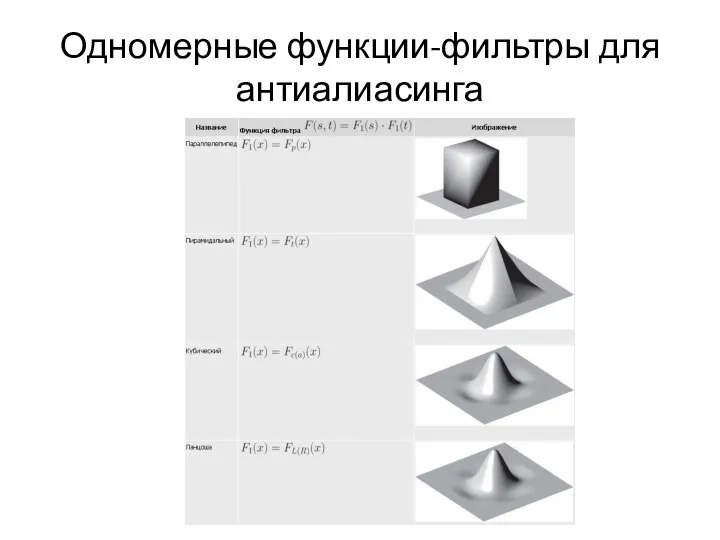
- 32. Одномерные функции-фильтры для антиалиасинга
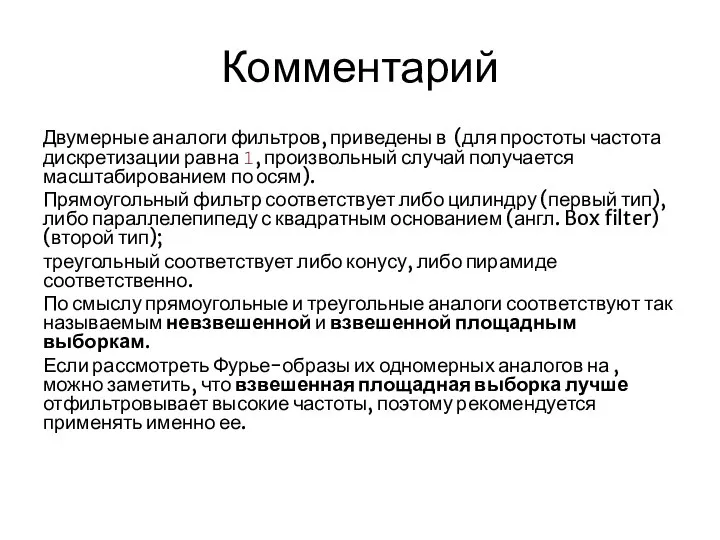
- 33. Комментарий Двумерные аналоги фильтров, приведены в (для простоты частота дискретизации равна 1, произвольный случай получается масштабированием
- 34. Антиалиасинг или Фильтрация-сглаживание (англ. antialiasing) - устранение видимых артефактов дискретизации, особенно для изображений линий или краев
- 35. Растеризация с антиалиасингом При растеризации абстрактно определенных примитивов (точек, линий, многоугольников) можно рассматривать их как двумерный
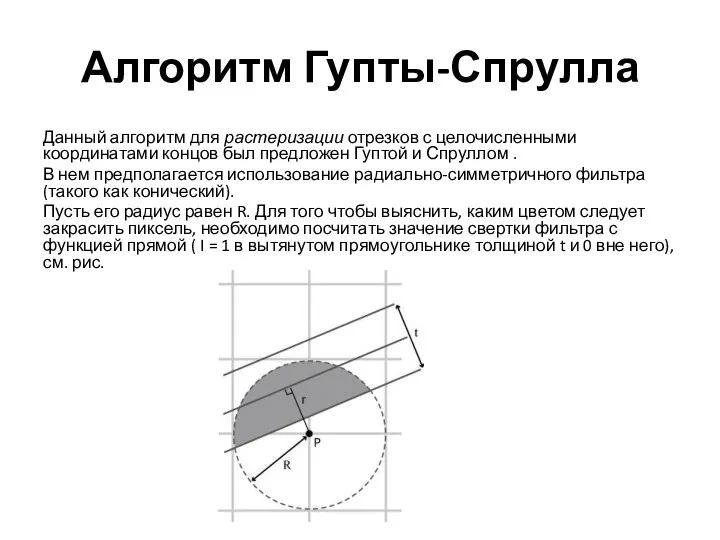
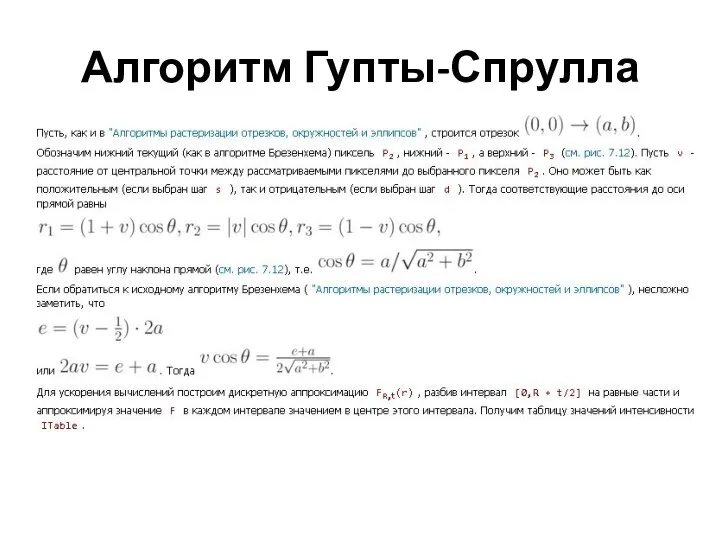
- 36. Алгоритм Гупты-Спрулла Данный алгоритм для растеризации отрезков с целочисленными координатами концов был предложен Гуптой и Спруллом
- 37. Алгоритм Гупты-Спрулла Обозначим результат этой операции FR,t(r), где r - расстояние от центра закрашиваемого пикселя до
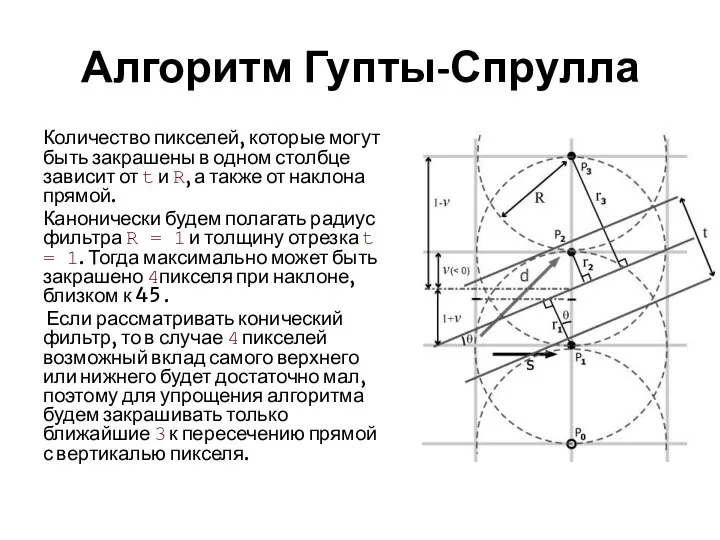
- 38. Алгоритм Гупты-Спрулла Количество пикселей, которые могут быть закрашены в одном столбце зависит от t и R,
- 39. Алгоритм Гупты-Спрулла
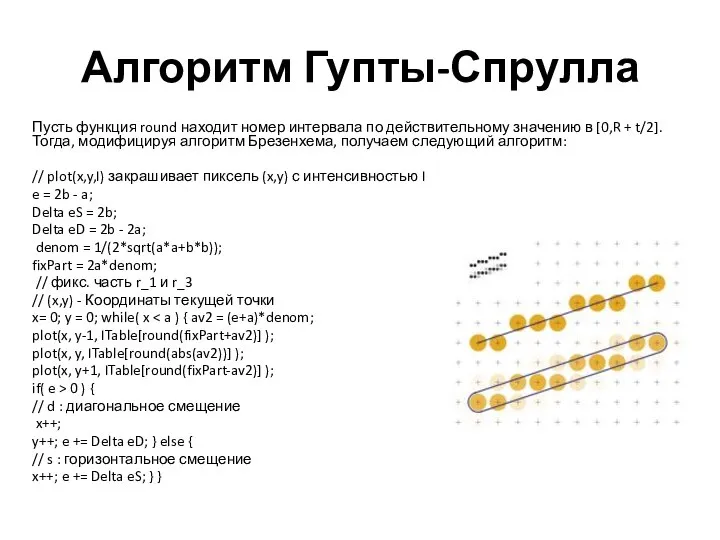
- 40. Алгоритм Гупты-Спрулла Пусть функция round находит номер интервала по действительному значению в [0,R + t/2]. Тогда,
- 42. Скачать презентацию
Слайд 2Содержание
Дискретизация
Частотная область
Гребенчатый фильтр
Теорема Найквиста-Котельникова
Дискретизация аналогового сигнала
Ряд Котельникова и Ряд Уиттакера
Теорема
Содержание
Дискретизация
Частотная область
Гребенчатый фильтр
Теорема Найквиста-Котельникова
Дискретизация аналогового сигнала
Ряд Котельникова и Ряд Уиттакера
Теорема
Слайд 3 Дискретизация
Этот раздел посвящен проблемам представления непрерывного двумерного цветового сигнала, которым
Дискретизация
Этот раздел посвящен проблемам представления непрерывного двумерного цветового сигнала, которым
Слайд 4Обработка сигналов
Наиболее корректно рассматривать возникающие проблемы в рамках теории обработки сигналов (англ. signal processing).
Двумерное
Обработка сигналов
Наиболее корректно рассматривать возникающие проблемы в рамках теории обработки сигналов (англ. signal processing).
Двумерное
Слайд 5Частотная область
Сигналы рассматривают как в пространственной области (англ. spatial domain) - это обычная область определения , так и
Частотная область
Сигналы рассматривают как в пространственной области (англ. spatial domain) - это обычная область определения , так и
Слайд 7Гребенчатый фильтр
Обычно дискретизация происходит путем измерения сигнала (взятия значения функции) через равные промежутки в
Гребенчатый фильтр
Обычно дискретизация происходит путем измерения сигнала (взятия значения функции) через равные промежутки в
Слайд 8Теорема Найквиста-Котельникова
Теорема Найквиста-Котельникова дает ответ на вопрос, какой частоты дискретизации fs достаточно для того,
Теорема Найквиста-Котельникова
Теорема Найквиста-Котельникова дает ответ на вопрос, какой частоты дискретизации fs достаточно для того,
Слайд 9Дискретизация аналогового сигнала
Дискретизация аналогового сигнала есть преобразование функции непрерывной переменной x (t) в последовательность
Дискретизация аналогового сигнала
Дискретизация аналогового сигнала есть преобразование функции непрерывной переменной x (t) в последовательность
Слайд 10Ряд Котельникова
Члены ряда Котельникова представляют собой функции отсчётов, сдвинутых друг относительно друга по
Ряд Котельникова
Члены ряда Котельникова представляют собой функции отсчётов, сдвинутых друг относительно друга по
Слайд 11Ряд Котельникова и Ряд Уиттакера
Ряд Котельникова и Ряд Уиттакера
Слайд 12Теорема отсчетов Котельникова
Теорема отсчетов Котельникова
Слайд 13Функции отсчётов
Функции отсчётов
Слайд 14Восстановление сигнала с помощью ряда Уиттакера-Котельникова
Восстановление сигнала с помощью ряда Уиттакера-Котельникова
Слайд 15Величина шага отсчета
При малом шаге последовательность отсчетов достаточно точно описывает сигнал, а
Величина шага отсчета
При малом шаге последовательность отсчетов достаточно точно описывает сигнал, а
Слайд 16Физический смысл теоремы Котельникова.
Теорема Котельникова утверждает, что если требуется передать непрерывный сигнал с
Физический смысл теоремы Котельникова.
Теорема Котельникова утверждает, что если требуется передать непрерывный сигнал с
Слайд 17Теорема (Найквиста-Котельникова)
В доказательстве теоремы и далее будет использоваться операция свертки функций I(x), J(x), определяемая так:
Теорема (Найквиста-Котельникова).
Теорема (Найквиста-Котельникова)
В доказательстве теоремы и далее будет использоваться операция свертки функций I(x), J(x), определяемая так:
Теорема (Найквиста-Котельникова).
Слайд 18Теорема
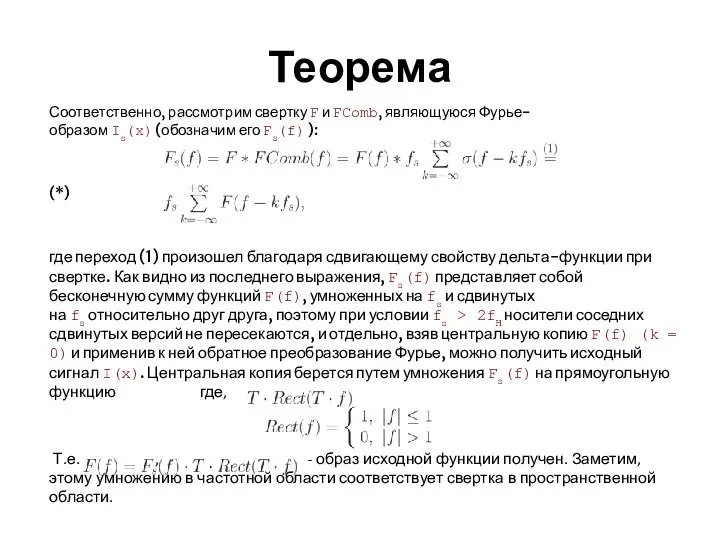
Соответственно, рассмотрим свертку F и FComb, являющуюся Фурье-образом Is(x) (обозначим его Fs(f) ):
(*)
где переход (1) произошел благодаря сдвигающему свойству
Теорема
Соответственно, рассмотрим свертку F и FComb, являющуюся Фурье-образом Is(x) (обозначим его Fs(f) ):
(*)
где переход (1) произошел благодаря сдвигающему свойству
Слайд 19Интерполяционная формула Найквиста-Шеннона
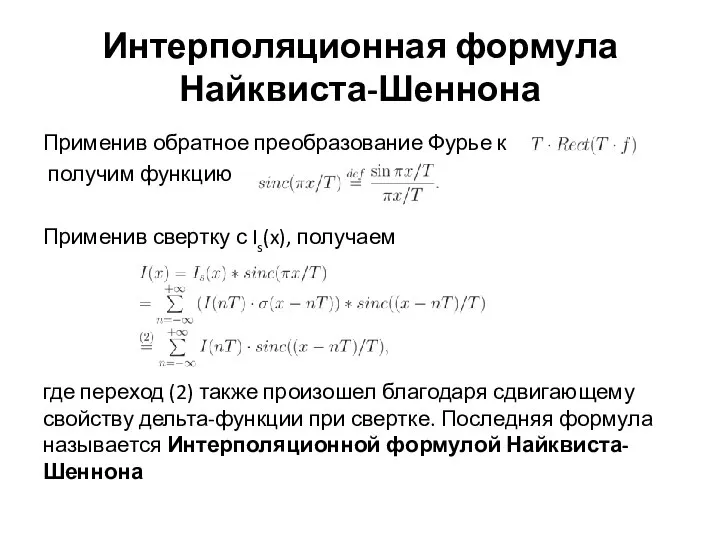
Применив обратное преобразование Фурье к
получим функцию
Применив свертку с Is(x), получаем
где переход
Интерполяционная формула Найквиста-Шеннона
Применив обратное преобразование Фурье к
получим функцию
Применив свертку с Is(x), получаем
где переход
Слайд 20Пример
Для завершения доказательства осталось показать, что невозможно однозначно восстановить сигнал при .
Приведем
Пример
Для завершения доказательства осталось показать, что невозможно однозначно восстановить сигнал при .
Приведем

Слайд 21Пример не однозначности образа
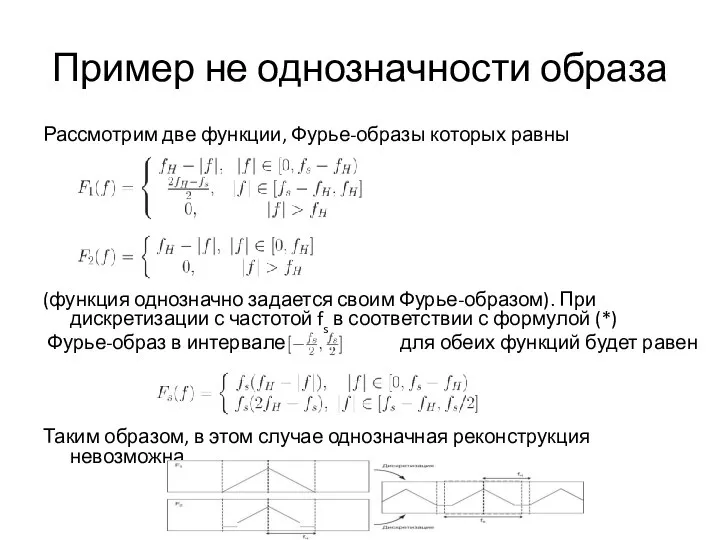
Рассмотрим две функции, Фурье-образы которых равны
(функция однозначно задается своим
Пример не однозначности образа
Рассмотрим две функции, Фурье-образы которых равны
(функция однозначно задается своим
Слайд 22Искажение сигнала и борьба с этим эффектом
Как было показано при доказательстве теоремы Найквиста-Котельникова,
Искажение сигнала и борьба с этим эффектом
Как было показано при доказательстве теоремы Найквиста-Котельникова,
Слайд 23Алиасинг
Алиасинг
Слайд 24Префильтрация
Для борьбы с подобными явлениями применяют префильтрацию - свертку с некой функцией
Префильтрация
Для борьбы с подобными явлениями применяют префильтрацию - свертку с некой функцией
Слайд 25Префильтрация
В двумерном случае фильтрация описывается следующим образом: интенсивность пикселя I(x, y) с центром в
Префильтрация
В двумерном случае фильтрация описывается следующим образом: интенсивность пикселя I(x, y) с центром в
Слайд 26Одномерные функции-фильтры для антиалиасинга
Одномерные функции-фильтры для антиалиасинга
Слайд 27Комментарий
Гауссовский фильтр обычно применяется с (так он лучше всего приближает sinc в частотной области), R берется
Комментарий
Гауссовский фильтр обычно применяется с (так он лучше всего приближает sinc в частотной области), R берется
Слайд 30Двумерные аналоги
Двумерные аналоги одномерного фильтра f11(x) строятся двумя путями:
как функция от радиуса:
как произведение:
Первый вариант
Двумерные аналоги
Двумерные аналоги одномерного фильтра f11(x) строятся двумя путями:
как функция от радиуса:
как произведение:
Первый вариант
Слайд 31 Радиально-симметричные фильтры для антиалиасинга
Радиально-симметричные фильтры для антиалиасинга
Слайд 32Одномерные функции-фильтры для антиалиасинга
Одномерные функции-фильтры для антиалиасинга
Слайд 33Комментарий
Двумерные аналоги фильтров, приведены в (для простоты частота дискретизации равна 1, произвольный случай получается
Комментарий
Двумерные аналоги фильтров, приведены в (для простоты частота дискретизации равна 1, произвольный случай получается
Слайд 34Антиалиасинг или Фильтрация-сглаживание
(англ. antialiasing) - устранение видимых артефактов дискретизации, особенно для изображений линий или краев
Антиалиасинг или Фильтрация-сглаживание
(англ. antialiasing) - устранение видимых артефактов дискретизации, особенно для изображений линий или краев
Слайд 35Растеризация с антиалиасингом
При растеризации абстрактно определенных примитивов (точек, линий, многоугольников) можно рассматривать их как
Растеризация с антиалиасингом
При растеризации абстрактно определенных примитивов (точек, линий, многоугольников) можно рассматривать их как
Слайд 36Алгоритм Гупты-Спрулла
Данный алгоритм для растеризации отрезков с целочисленными координатами концов был предложен Гуптой и
Алгоритм Гупты-Спрулла
Данный алгоритм для растеризации отрезков с целочисленными координатами концов был предложен Гуптой и
Слайд 37Алгоритм Гупты-Спрулла
Обозначим результат этой операции FR,t(r), где r - расстояние от центра закрашиваемого пикселя
Алгоритм Гупты-Спрулла
Обозначим результат этой операции FR,t(r), где r - расстояние от центра закрашиваемого пикселя
Слайд 38Алгоритм Гупты-Спрулла
Количество пикселей, которые могут быть закрашены в одном столбце зависит от t и R,
Алгоритм Гупты-Спрулла
Количество пикселей, которые могут быть закрашены в одном столбце зависит от t и R,
Слайд 39Алгоритм Гупты-Спрулла
Алгоритм Гупты-Спрулла
Слайд 40Алгоритм Гупты-Спрулла
Пусть функция round находит номер интервала по действительному значению в [0,R + t/2]. Тогда,
Алгоритм Гупты-Спрулла
Пусть функция round находит номер интервала по действительному значению в [0,R + t/2]. Тогда,
 Научение. Организационное поведение
Научение. Организационное поведение Правила дорожного движения. Безопасная дорога
Правила дорожного движения. Безопасная дорога IBH PPP neu
IBH PPP neu На самом деле не всё так, как нам кажется!
На самом деле не всё так, как нам кажется! ПРЕЗЕНТАЦИЯ КОМПАНИИ
ПРЕЗЕНТАЦИЯ КОМПАНИИ Презентация без названия
Презентация без названия СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ ТРЕНИРОВКИ В ГОДИЧНОМ ЦИКЛЕ ПОДГОТОВКИ ЛЫЖНИЦ -ГОНЩИЦ
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ ТРЕНИРОВКИ В ГОДИЧНОМ ЦИКЛЕ ПОДГОТОВКИ ЛЫЖНИЦ -ГОНЩИЦ Историческая судьба Западных и Юго-Западных русских земель в составе Великого княжества Литовского
Историческая судьба Западных и Юго-Западных русских земель в составе Великого княжества Литовского Гравитационные силы
Гравитационные силы Аккумуляторный завод АКОМ
Аккумуляторный завод АКОМ Единицы длины (4 класс)
Единицы длины (4 класс) Программа «Укрепление общественной поддержки некоммерческих организаций»
Программа «Укрепление общественной поддержки некоммерческих организаций» Наше питание
Наше питание Презентация на тему Викторина по русским народным сказкам
Презентация на тему Викторина по русским народным сказкам Космос
Космос Об инвестиционном пилотном проекте «Энергетический комплекс переработки углеродосодержащего сырья (биомасса, древесные отходы,
Об инвестиционном пилотном проекте «Энергетический комплекс переработки углеродосодержащего сырья (биомасса, древесные отходы, «Опасные вещества в красивой упаковке»
«Опасные вещества в красивой упаковке» Государственные символы Донецкой Народной Республики
Государственные символы Донецкой Народной Республики Вдохновляющее настроение. Съёмки. Black wed
Вдохновляющее настроение. Съёмки. Black wed Современная образовательная парадигма (основные характеристики)
Современная образовательная парадигма (основные характеристики) Проектирование и конструкция судов. Круизный лайнер
Проектирование и конструкция судов. Круизный лайнер Пункт замены масла Motor OIL
Пункт замены масла Motor OIL Золотая Хохлома
Золотая Хохлома Центр Профилактики Заболеваний и Реабилитации
Центр Профилактики Заболеваний и Реабилитации Present Simple глагол to work
Present Simple глагол to work  Презентация на тему моллюски 7 класс
Презентация на тему моллюски 7 класс Презентация по геометриина тему: «Точка, прямая, отрезок, луч и угол»
Презентация по геометриина тему: «Точка, прямая, отрезок, луч и угол» Построение осей складок
Построение осей складок