IV всероссийская научно-практическая конференция «Территориально-распределенные системы охраны» Алгоритмы сопровождения целей
- IV всероссийская научно-практическая конференция «Территориально-распределенные системы охраны» Алгоритмы сопровождения целей

Содержание
- 2. Понятие «сопровождение» в системах охранного телевидения Вычисление траекторий движений объектов в поле зрения одной или нескольких
- 3. Зачем нужно сопровождение? Повышение точности распознавания ситуации на основе правил Срыв сопровождения часто приводит к пропуску
- 4. Сопровождение объектов при мониторинге Ж/Д полотна
- 5. Распознавание ситуаций на основе анализа траекторий
- 6. Алгоритмы сопровождения в устройстве MagicBox Связывание регионов движения Простое (без анализа перекрытий) Сложное (с учетом анализа
- 7. Связывание регионов движения Без анализа перекрытий С анализом перекрытий
- 8. Временное пропадание объекта из поле зрения камеры Без анализа перекрытий С анализом перекрытий
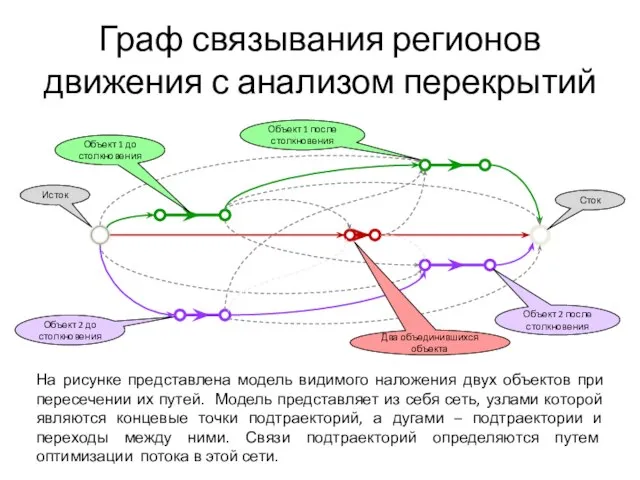
- 9. На рисунке представлена модель видимого наложения двух объектов при пересечении их путей. Модель представляет из себя
- 10. Корреляционный алгоритм сопровождения Индивидуальное сопровождение в группе Проблема: правильная инициализация
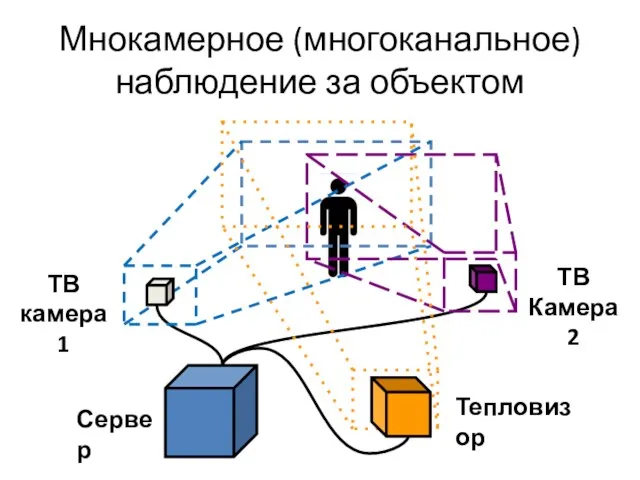
- 11. Мнокамерное (многоканальное) наблюдение за объектом ТВ камера 1 ТВ Камера 2 Тепловизор Сервер
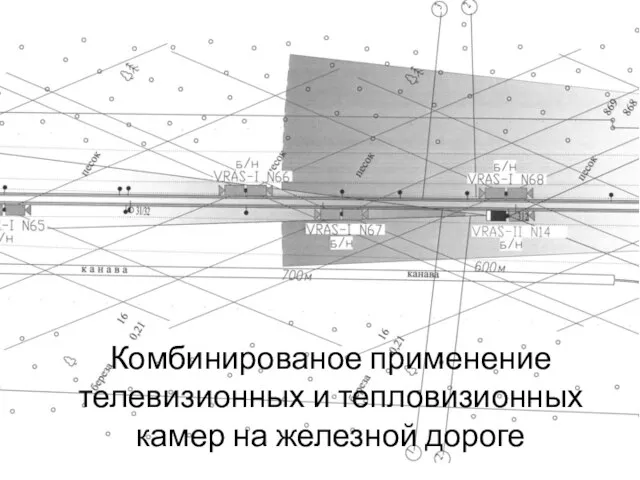
- 12. Комбинированое применение телевизионных и тепловизионных камер на железной дороге
- 13. Мониторинг ж/д полотна телевизионной камерой Дальность действия до 80 метров Сильно зависит от погодных условий
- 14. Мониторинг ж/д полотна Зона контроля 100-800 м 7° (В) x 5° (Ш) для объектива 100 мм
- 15. Задачи многокамерной видеоаналитики Устранение избыточности и повторных срабатываний в зоне перекрытия Повышения точности позиционирования объектов и
- 16. Исходный видеосигнал – 9 каналов
- 17. Привязка камер к карте (калибровка по 4 узловым точкам) r – экранные координаты камеры R –
- 18. Оценка параметров выборочной функции каждой камеры на этапе калибровки
- 19. Перекрытие выборочных функций распределения по всем камерам
- 20. Результаты работы алгоритма многокамерного сопровождения Траектория по данным пяти камер
- 22. Скачать презентацию
Слайд 2Понятие «сопровождение»
в системах охранного телевидения
Вычисление траекторий движений объектов в поле зрения одной
Понятие «сопровождение»
в системах охранного телевидения
Вычисление траекторий движений объектов в поле зрения одной

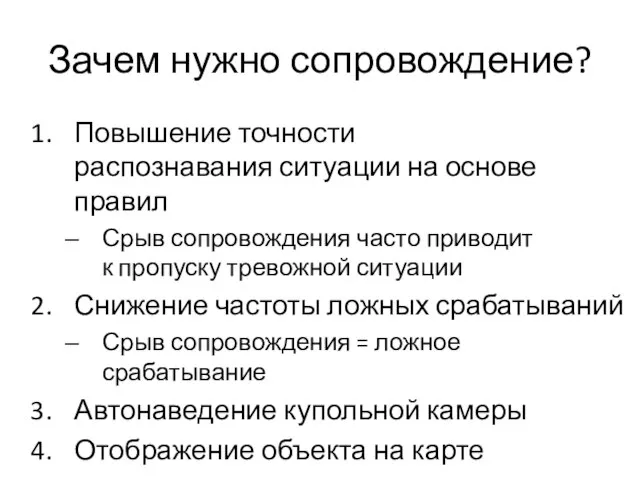
Слайд 3Зачем нужно сопровождение?
Повышение точности
распознавания ситуации на основе правил
Срыв сопровождения часто приводит
к пропуску
Зачем нужно сопровождение?
Повышение точности
распознавания ситуации на основе правил
Срыв сопровождения часто приводит
к пропуску
Слайд 4Сопровождение объектов при
мониторинге Ж/Д полотна
Сопровождение объектов при
мониторинге Ж/Д полотна

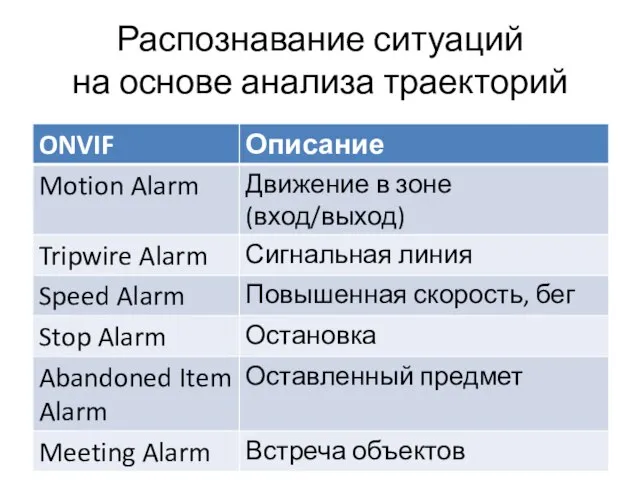
Слайд 5Распознавание ситуаций
на основе анализа траекторий
Распознавание ситуаций
на основе анализа траекторий
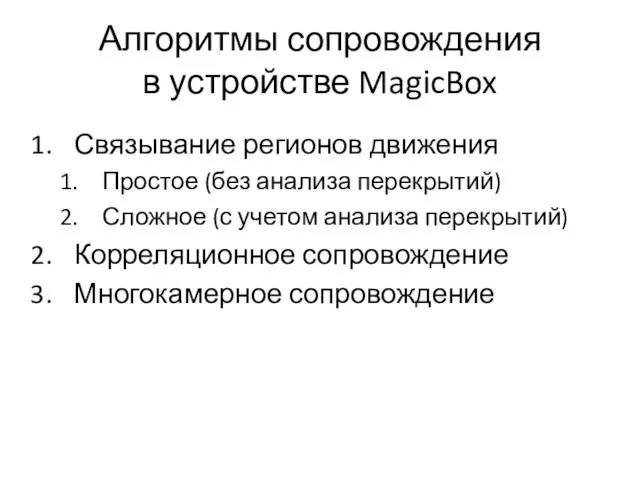
Слайд 6Алгоритмы сопровождения
в устройстве MagicBox
Связывание регионов движения
Простое (без анализа перекрытий)
Сложное (с учетом анализа
Алгоритмы сопровождения
в устройстве MagicBox
Связывание регионов движения
Простое (без анализа перекрытий)
Сложное (с учетом анализа
Слайд 7Связывание регионов движения
Без анализа перекрытий
С анализом
перекрытий
Связывание регионов движения
Без анализа перекрытий
С анализом
перекрытий

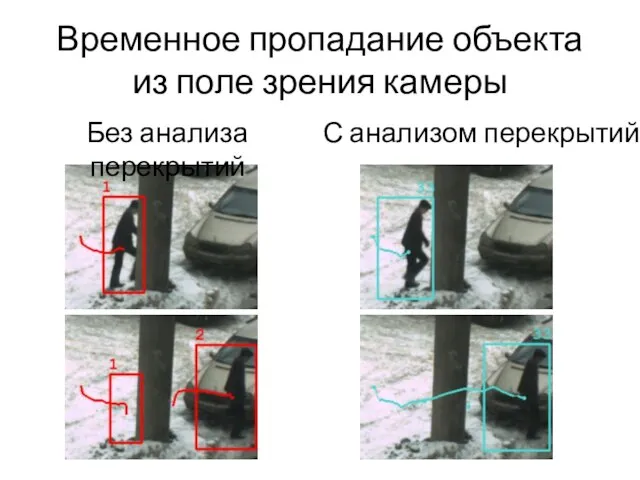
Слайд 8Временное пропадание объекта
из поле зрения камеры
Без анализа перекрытий
С анализом перекрытий
Временное пропадание объекта
из поле зрения камеры
Без анализа перекрытий
С анализом перекрытий
Слайд 9На рисунке представлена модель видимого наложения двух объектов при пересечении их путей.
На рисунке представлена модель видимого наложения двух объектов при пересечении их путей.
Слайд 10Корреляционный алгоритм
сопровождения
Индивидуальное сопровождение в группе
Проблема: правильная инициализация
Корреляционный алгоритм
сопровождения
Индивидуальное сопровождение в группе
Проблема: правильная инициализация

Слайд 11Мнокамерное (многоканальное)
наблюдение за объектом
ТВ
камера 1
ТВ
Камера 2
Тепловизор
Сервер
Мнокамерное (многоканальное)
наблюдение за объектом
ТВ
камера 1
ТВ
Камера 2
Тепловизор
Сервер
Слайд 12Комбинированое применение
телевизионных и тепловизионных камер на железной дороге
Комбинированое применение
телевизионных и тепловизионных камер на железной дороге
Слайд 13Мониторинг ж/д полотна
телевизионной камерой
Дальность действия до 80 метров
Сильно зависит от погодных условий
Мониторинг ж/д полотна
телевизионной камерой
Дальность действия до 80 метров
Сильно зависит от погодных условий

Слайд 14Мониторинг ж/д полотна
Зона контроля 100-800 м
7° (В) x 5° (Ш) для объектива
Мониторинг ж/д полотна
Зона контроля 100-800 м
7° (В) x 5° (Ш) для объектива

Слайд 15Задачи многокамерной видеоаналитики
Устранение избыточности и повторных срабатываний в зоне перекрытия
Повышения точности позиционирования
Задачи многокамерной видеоаналитики
Устранение избыточности и повторных срабатываний в зоне перекрытия
Повышения точности позиционирования
Слайд 16Исходный видеосигнал – 9 каналов
Исходный видеосигнал – 9 каналов

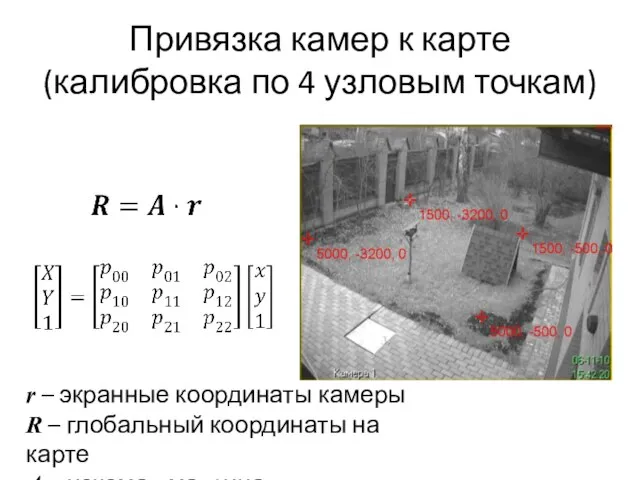
Слайд 17Привязка камер к карте
(калибровка по 4 узловым точкам)
r – экранные координаты камеры
R
Привязка камер к карте
(калибровка по 4 узловым точкам)
r – экранные координаты камеры R
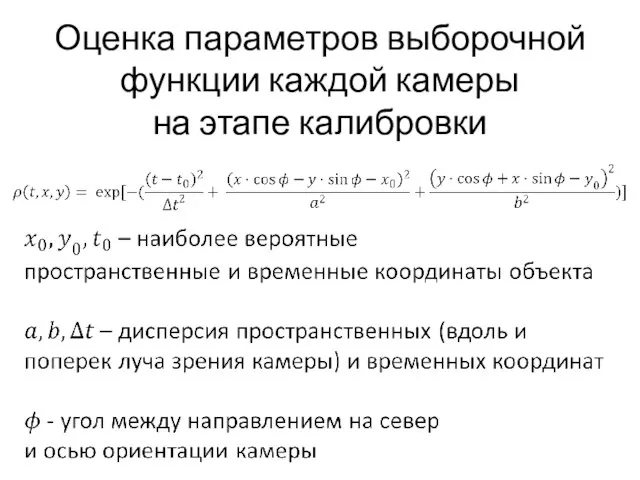
Слайд 18Оценка параметров выборочной функции каждой камеры
на этапе калибровки
Оценка параметров выборочной функции каждой камеры
на этапе калибровки
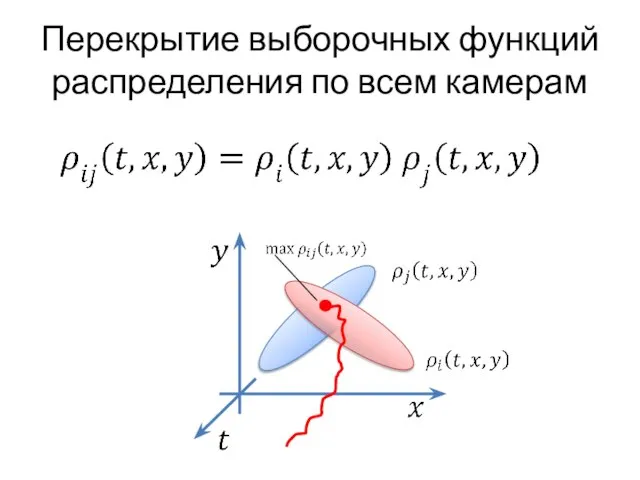
Слайд 19Перекрытие выборочных функций распределения по всем камерам
Перекрытие выборочных функций распределения по всем камерам
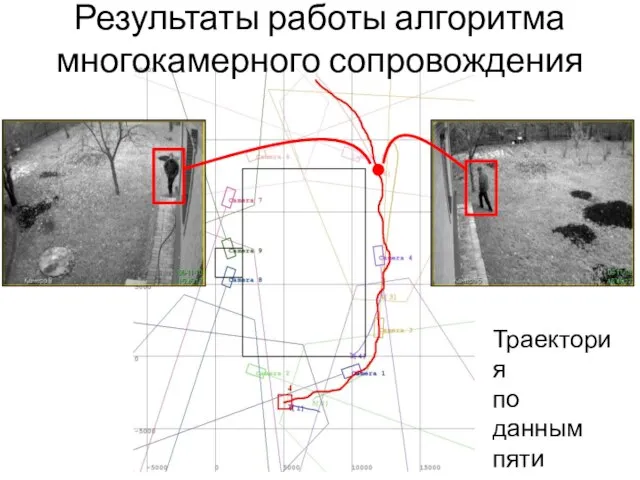
Слайд 20Результаты работы алгоритма многокамерного сопровождения
Траектория
по данным
пяти камер
Результаты работы алгоритма многокамерного сопровождения
Траектория
по данным
пяти камер
 Презентация нового продукта «Обзор заработных плат»
Презентация нового продукта «Обзор заработных плат» ПЛЮСЫ И МИНУСЫ, ПОЛОЖИТЕЛЬНОЕ И ОТРИЦАТЕЛЬНОЕ В МАТЕМАТИКЕ И В ЖИЗНИ
ПЛЮСЫ И МИНУСЫ, ПОЛОЖИТЕЛЬНОЕ И ОТРИЦАТЕЛЬНОЕ В МАТЕМАТИКЕ И В ЖИЗНИ Фриденсрайх Хундертвассер
Фриденсрайх Хундертвассер Аналоговые и цифровые сигналы
Аналоговые и цифровые сигналы Право для школьников
Право для школьников 6b8c575b324073cbf02a3d966912b4c92047c6ed — копия
6b8c575b324073cbf02a3d966912b4c92047c6ed — копия Реклама ВКонтакте
Реклама ВКонтакте В поход всей семьей – это здорово! Семейный выходной
В поход всей семьей – это здорово! Семейный выходной Акцизы с 1 января 2009 года
Акцизы с 1 января 2009 года Презентация на тему: Оценка качества предоставляемых образовательных услуг
Презентация на тему: Оценка качества предоставляемых образовательных услуг Презентация на тему Средства для борьбы с насекомыми
Презентация на тему Средства для борьбы с насекомыми Презентация на тему Классическая теория экономического риска
Презентация на тему Классическая теория экономического риска  Луна
Луна Обучающая интерактивная игра на тематику Управление проектами
Обучающая интерактивная игра на тематику Управление проектами Пришкольный лагерь "Солнышко"
Пришкольный лагерь "Солнышко" Управление комплексом маркетинговых коммуникаций
Управление комплексом маркетинговых коммуникаций Информационная безопасность
Информационная безопасность НОВОСТИ ЕГЭ
НОВОСТИ ЕГЭ О чем идет речь - Об оценке деятельности подразделения Единица оценки – подразделение Оценка работы сотрудника – не включаетс
О чем идет речь - Об оценке деятельности подразделения Единица оценки – подразделение Оценка работы сотрудника – не включаетс Физика в музыке
Физика в музыке LFood. Сэндвичи
LFood. Сэндвичи Сложение сил, действующих вдоль одной прямой. Равнодействующая
Сложение сил, действующих вдоль одной прямой. Равнодействующая «Мастерская чтения – идеи, проекты, воплощения»
«Мастерская чтения – идеи, проекты, воплощения» Использование Интернет-тренажеров при подготовке студентов к аккредитационному тестированию Сайт www.i-exam.ru
Использование Интернет-тренажеров при подготовке студентов к аккредитационному тестированию Сайт www.i-exam.ru Куликовская битва
Куликовская битва Архитектурные стили Петербурга
Архитектурные стили Петербурга Модернизация ЛВС в рамках создания регионального фрагмента единой государственной информационной системы в сфере здравоохране
Модернизация ЛВС в рамках создания регионального фрагмента единой государственной информационной системы в сфере здравоохране 3 Ховайло ВВ - Презентация проекта на открытие - СОГЛ (С) 20.10
3 Ховайло ВВ - Презентация проекта на открытие - СОГЛ (С) 20.10