- Комплекс РЗМ (Зоны обслуживания)

Содержание
- 3. Комплекс РЗМ (Зоны обслуживания). Для обеспечения работы РЗМ в ЦЗ предусмотрены следующие зоны обслуживания: ∙ Место
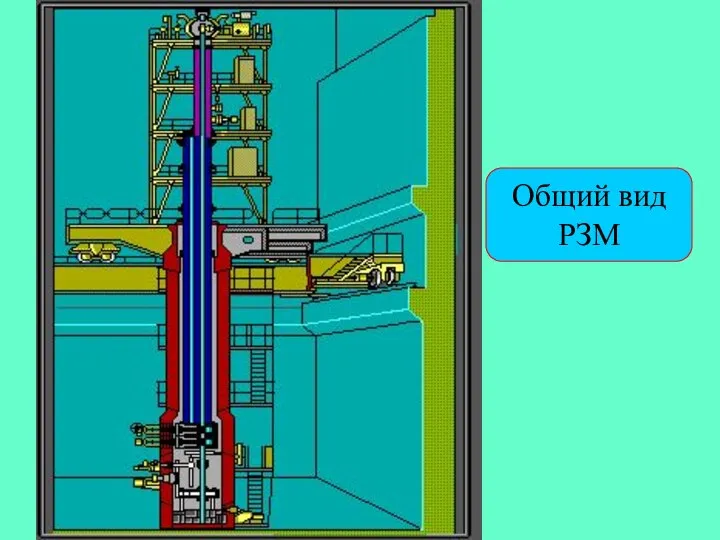
- 4. Общий вид РЗМ
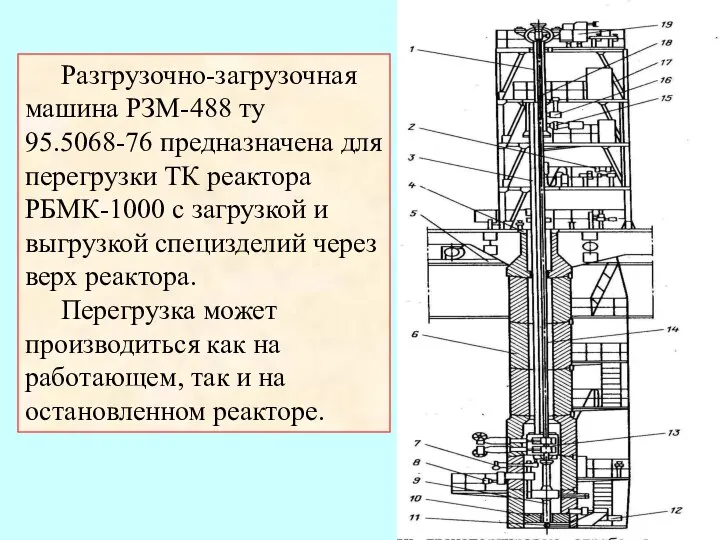
- 5. Разгрузочно-загрузочная машина РЗМ-488 ту 95.5068-76 предназначена для перегрузки ТК реактора РБМК-1000 с загрузкой и выгрузкой специзделий
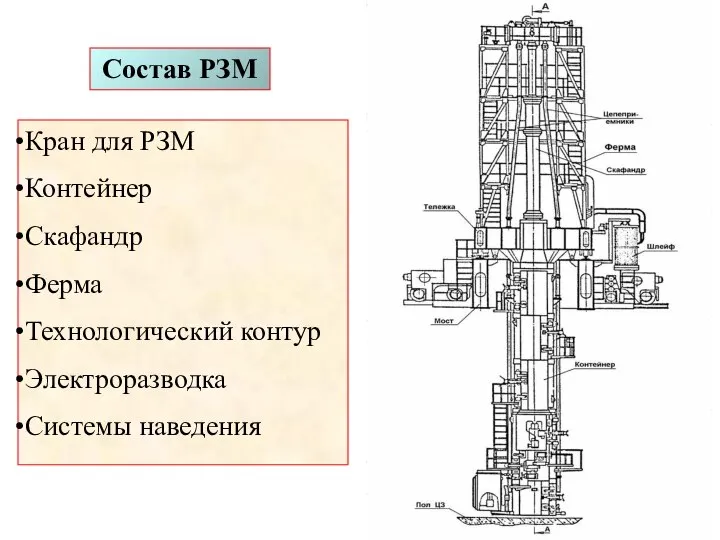
- 6. Состав РЗМ Кран для РЗМ Контейнер Скафандр Ферма Технологический контур Электроразводка Системы наведения
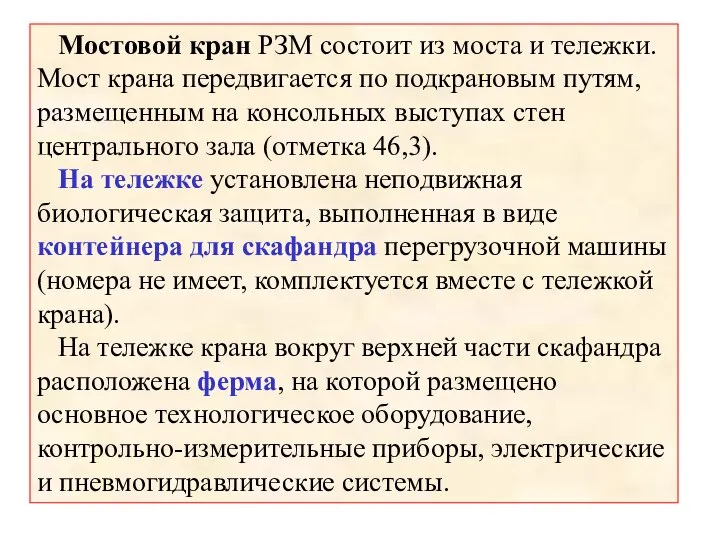
- 7. Мостовой кран РЗМ состоит из моста и тележки. Мост крана передвигается по подкрановым путям, размещенным на
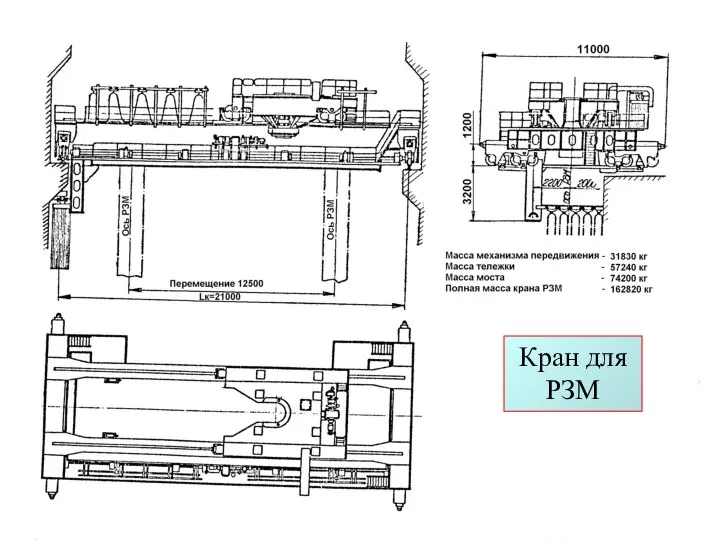
- 8. Кран для РЗМ
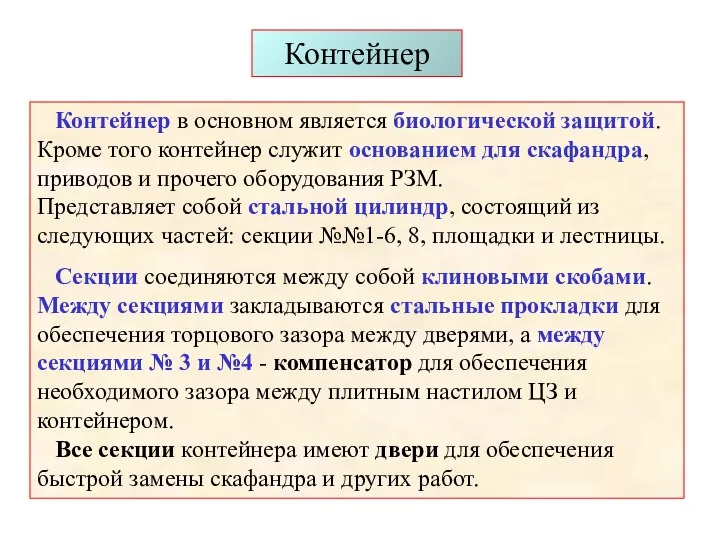
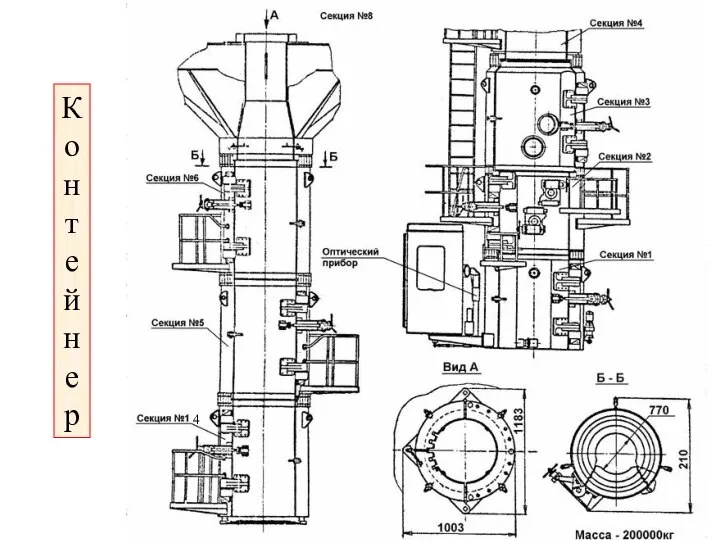
- 9. Контейнер в основном является биологической защитой. Кроме того контейнер служит основанием для скафандра, приводов и прочего
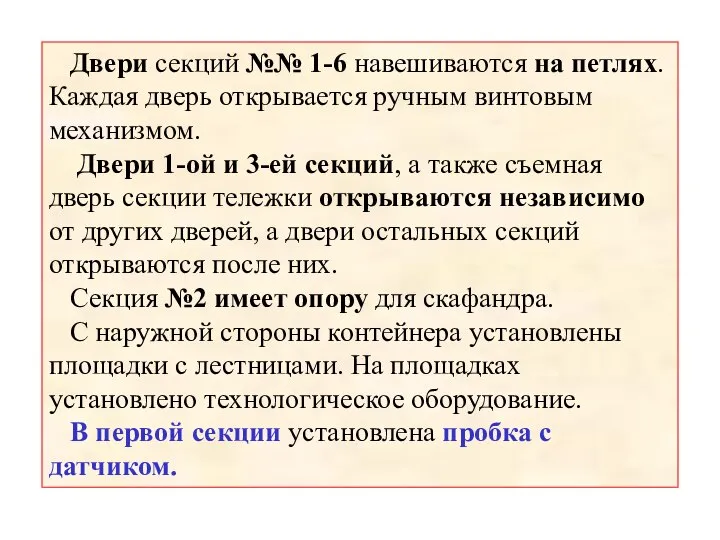
- 10. Двери секций №№ 1-6 навешиваются на петлях. Каждая дверь открывается ручным винтовым механизмом. Двери 1-ой и
- 11. Контейнер 4
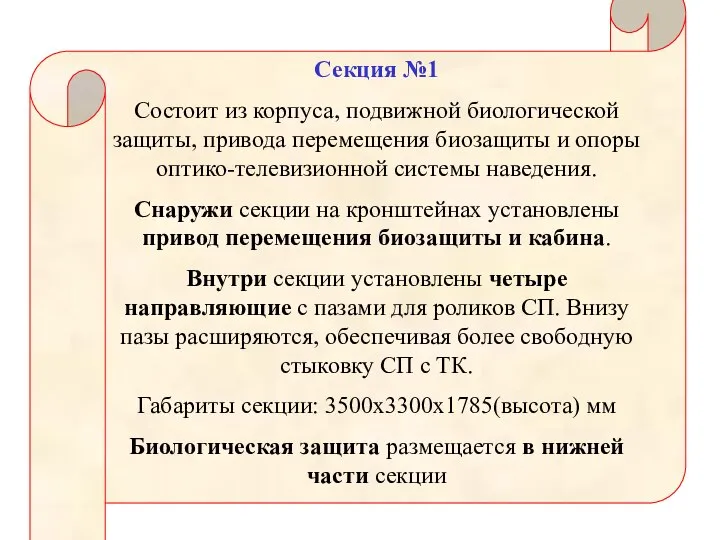
- 12. Секция №1 Состоит из корпуса, подвижной биологической защиты, привода перемещения биозащиты и опоры оптико-телевизионной системы наведения.
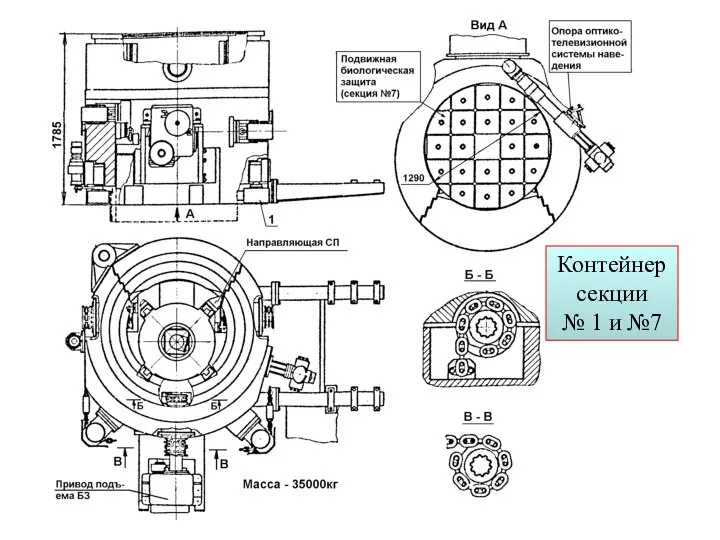
- 13. Контейнер секции № 1 и №7
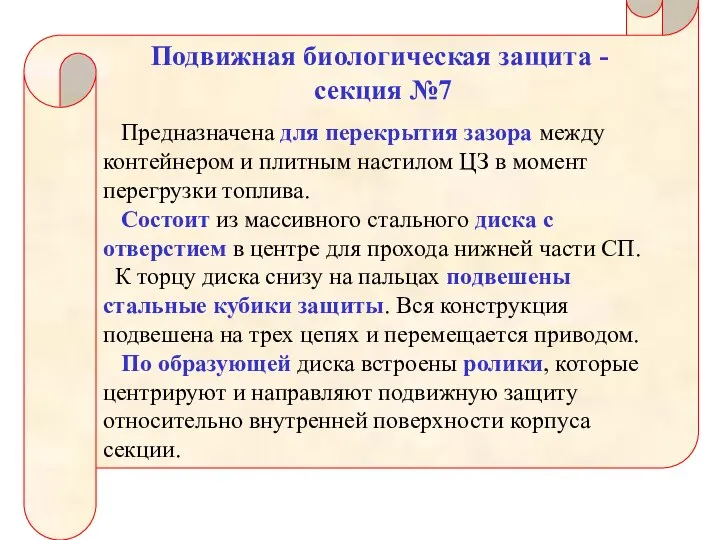
- 14. Подвижная биологическая защита - секция №7 Предназначена для перекрытия зазора между контейнером и плитным настилом ЦЗ
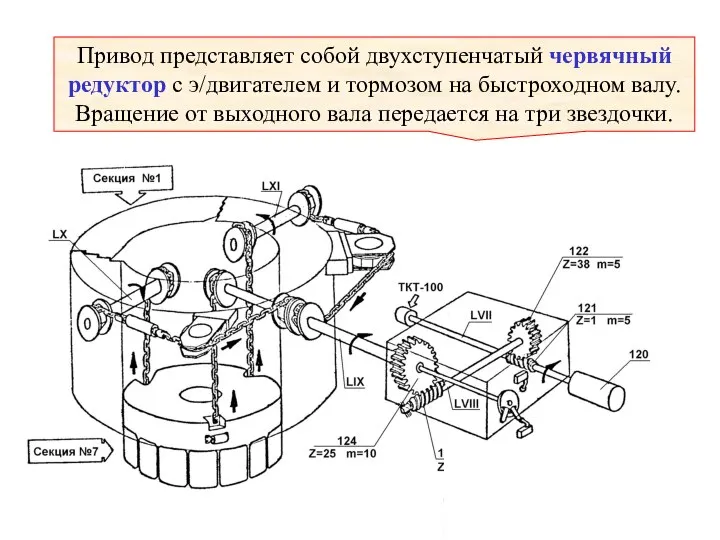
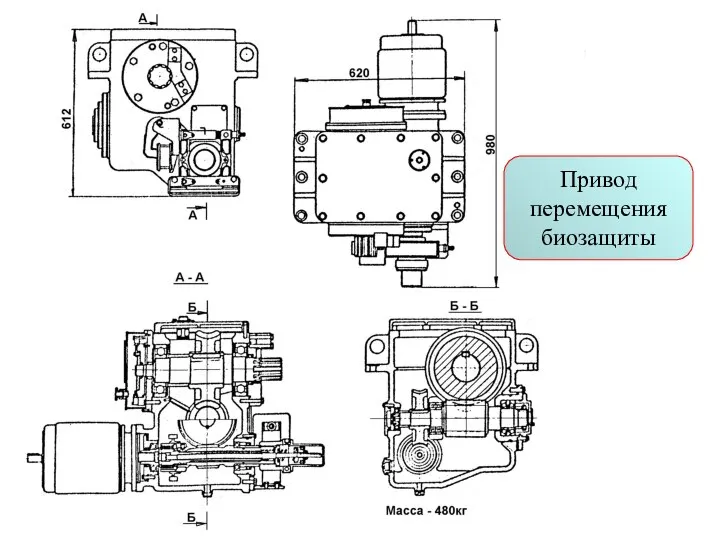
- 16. Привод перемещения биозащиты
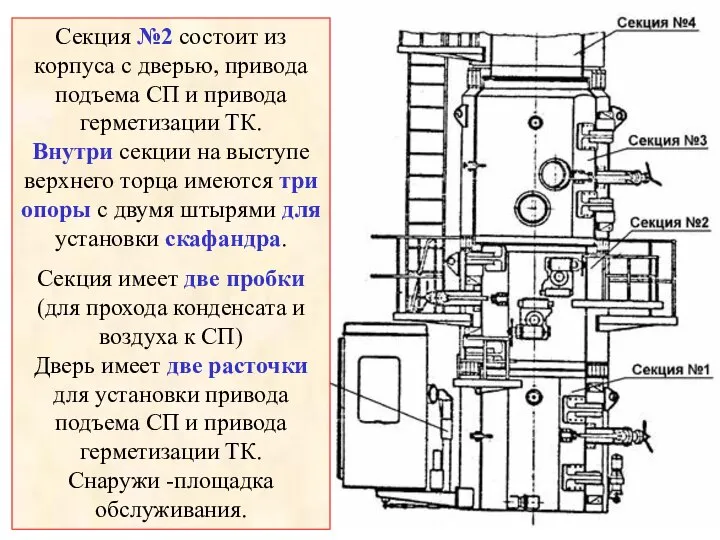
- 18. Секция №2 состоит из корпуса с дверью, привода подъема СП и привода герметизации ТК. Внутри секции
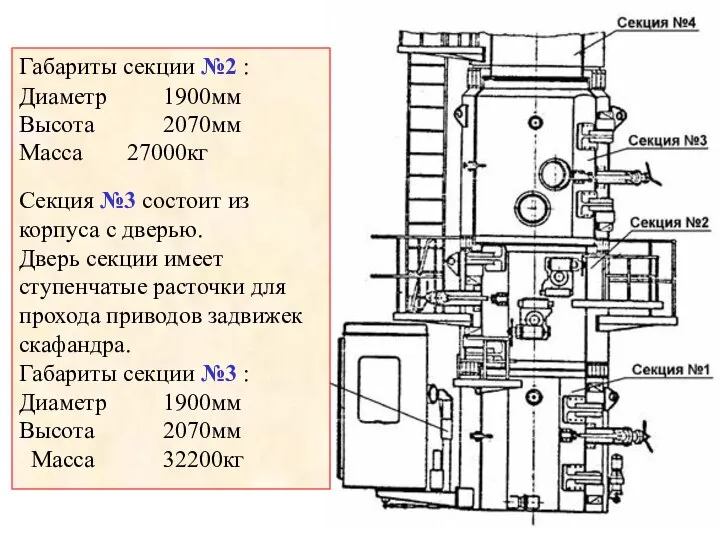
- 19. Габариты секции №2 : Диаметр 1900мм Высота 2070мм Масса 27000кг Секция №3 состоит из корпуса с
- 20. Секции №4, 5, 6 состоят из корпуса с дверью и отличаются друг от друга направлением открывания
- 21. Секции №8(«бублик») состоит из разъемного кольца с 4-мя выдвижными упорами, которые являются дополнительной опорой для скафандра.
- 22. Кабина предназначена для размещения пульта управления мостом и тележкой при выводе РЗМ на координату. На передней
- 23. Конструктивно скафандр разделен на 4 основные части: ∙ Верхняя часть ∙ Средняя часть ∙ Задвижка параллельная
- 24. Между средней и нижней частями расположено запорное устройство-задвижка параллельная двухдисковая сдвоенная. Скафандр нижним торцом задвижки устанавливается
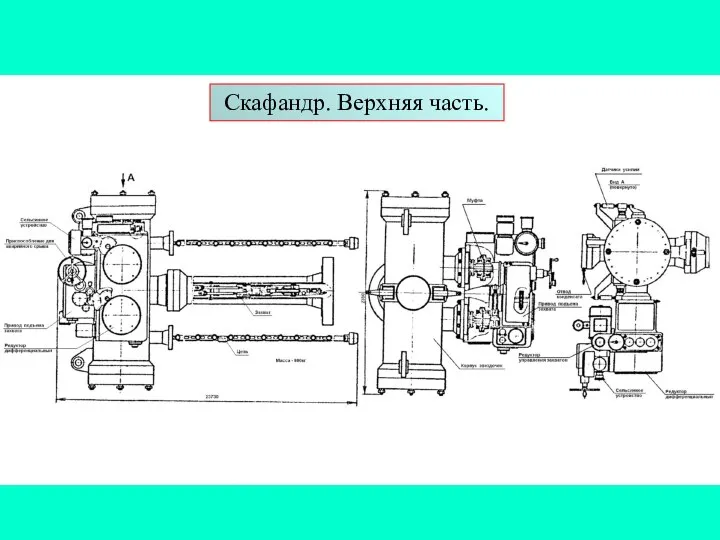
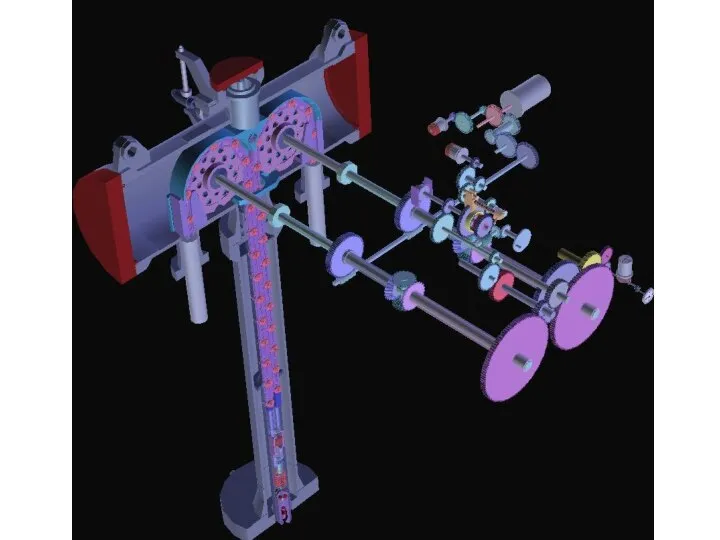
- 25. В верхней части скафандра размещена система извлечения и установки кассет. В состав верхней части входят приемники
- 26. Скафандр. Верхняя часть.
- 28. Система извлечения и установки кассет Основные составные части: ∙ Корпус зведочек ∙ Привод подъема захвата ∙
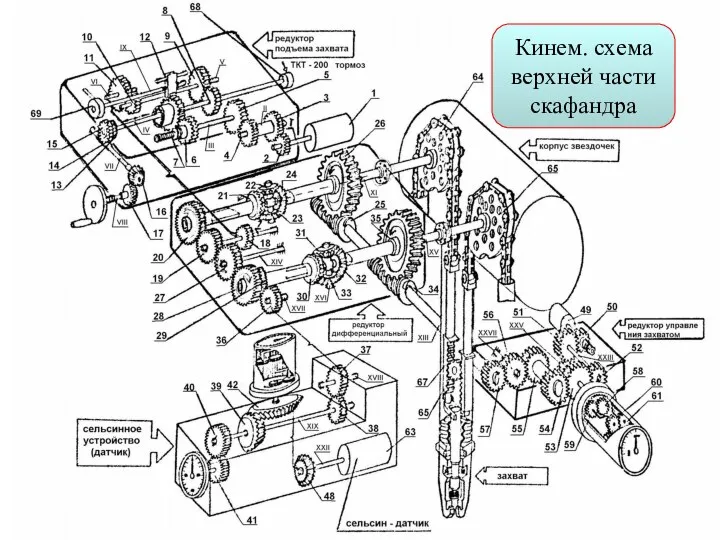
- 29. Кинем. схема верхней части скафандра
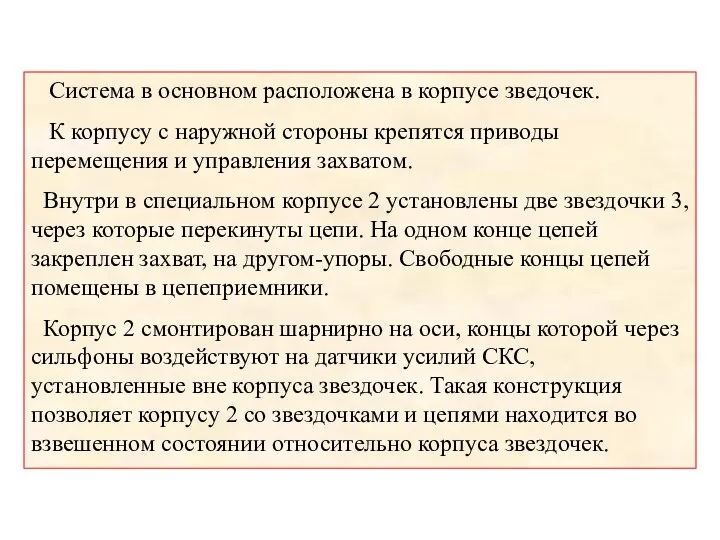
- 30. Система в основном расположена в корпусе зведочек. К корпусу с наружной стороны крепятся приводы перемещения и
- 31. Звездочки соединены с приводом подъема захвата с помощью компенсирующих муфт. Все это позволяет контролировать усилия, возникающие
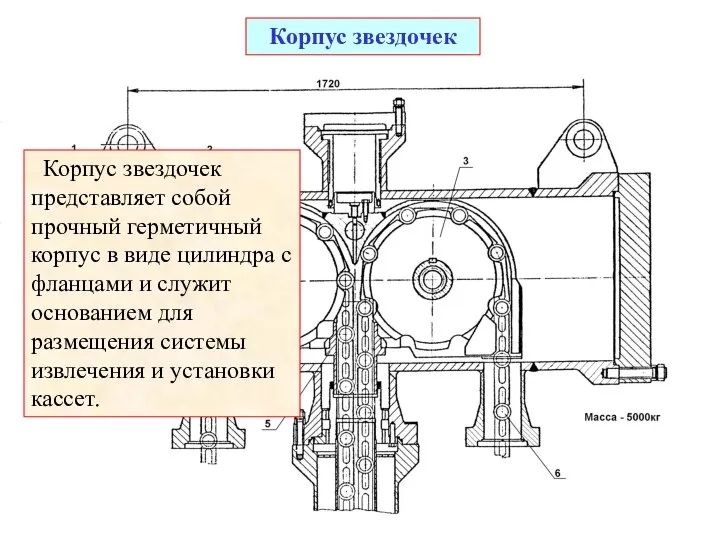
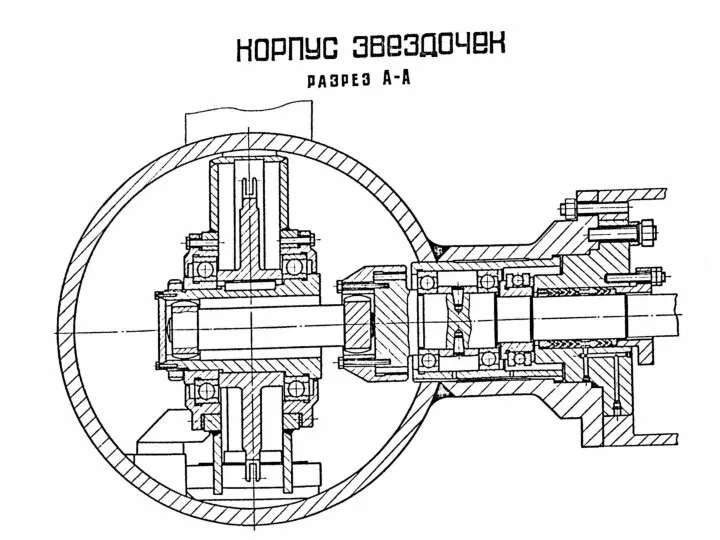
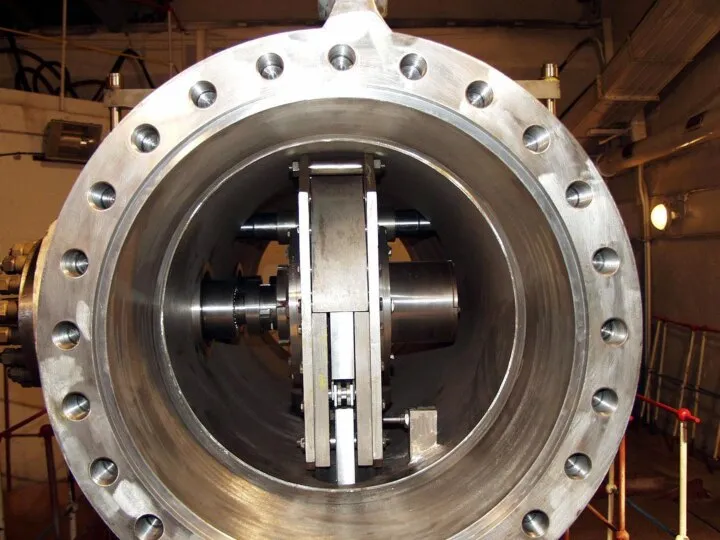
- 32. Корпус звездочек Корпус звездочек представляет собой прочный герметичный корпус в виде цилиндра с фланцами и служит
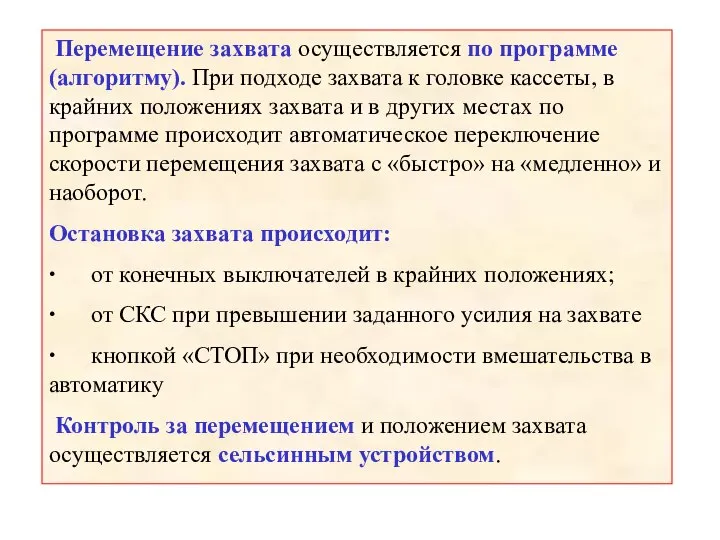
- 36. Перемещение захвата осуществляется по программе (алгоритму). При подходе захвата к головке кассеты, в крайних положениях захвата
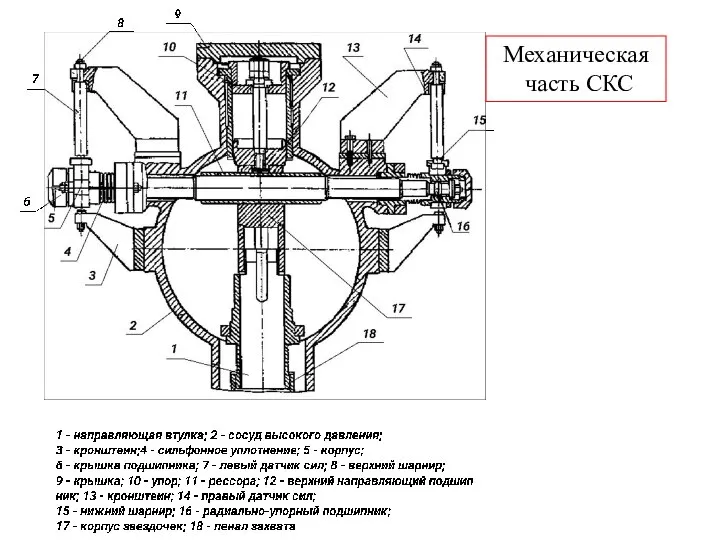
- 37. Механическая часть СКС
- 38. Привод подъема захвата
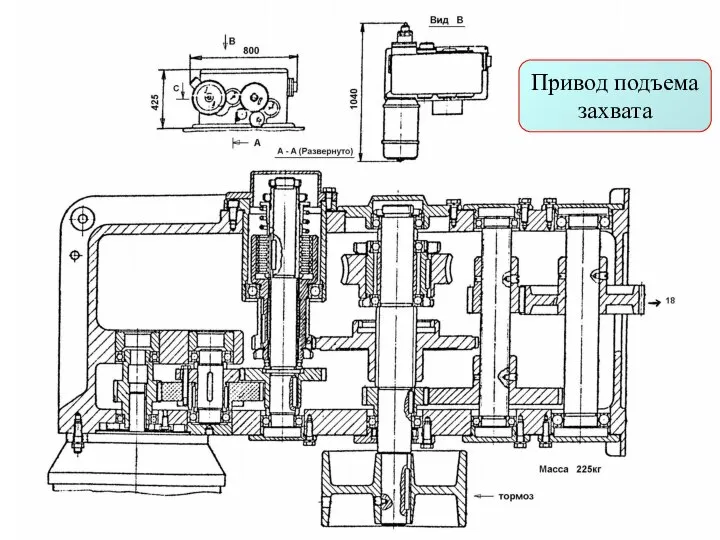
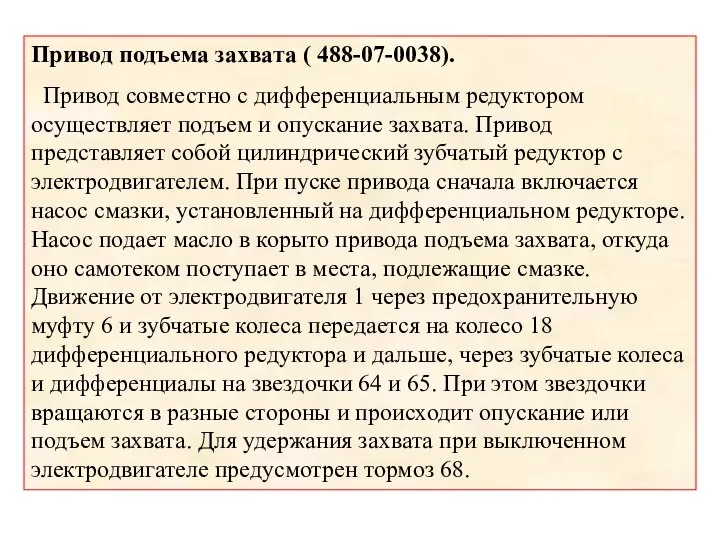
- 39. Привод подъема захвата ( 488-07-0038). Привод совместно с дифференциальным редуктором осуществляет подъем и опускание захвата. Привод
- 40. Кинем. схема верхней части скафандра
- 41. В приводе подъема захвата имеется ручной дублер привода. Переключение с механического перемещения на ручное осуществляется рукояткой
- 43. Редуктор управления захватом
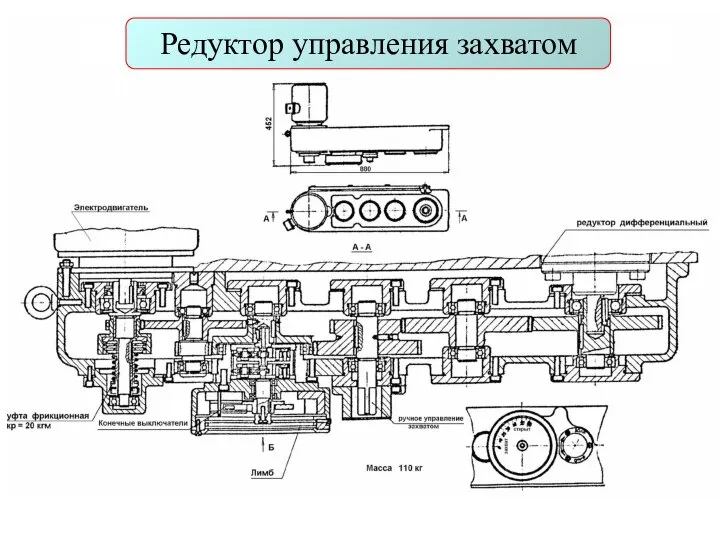
- 44. Редуктор управления захватом (488-08-0017). Редуктор предназначен для открывания и закрытия захвата и представляет собой цилиндрический зубчатый
- 45. Редуктор дифференциальный
- 46. Редуктор дифференциальный (488-06-0014). Редуктор предназначен для передачи движения от привода подъема захвата и привода управления захватом
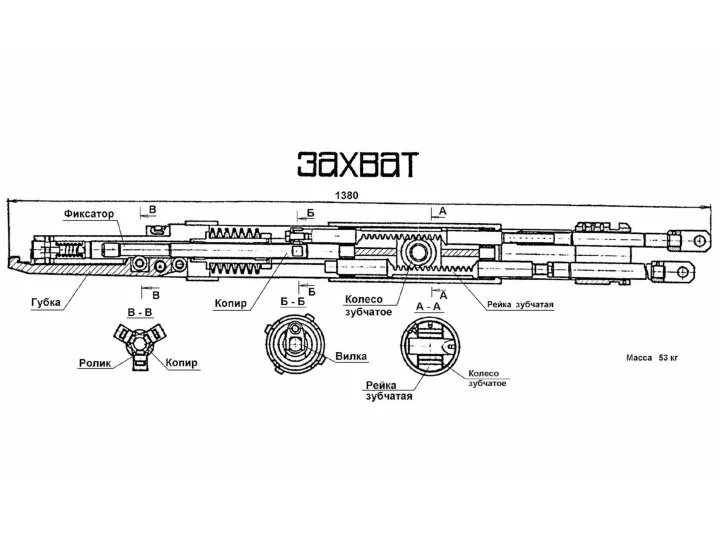
- 47. Захват (KM-120-50-0001). Захват предназначен для удерживания специзделий при их установке и извлечении из ТК, гнезд ТС,
- 49. Цепь (488-23-0003К). В сиcтеме извлечения и установки специзделий применены две цепи, которые выполняют функции тянущего и
- 50. Сельсинное устройство (488-09-0023). Сельсинное устройство – датчик, предназначенный для дистанционного контроля за перемещением захвата и для
- 51. Система контроля сил (CKС). Система контроля сил предназначена для контроля усилий, возникающих при перегрузке ТК и
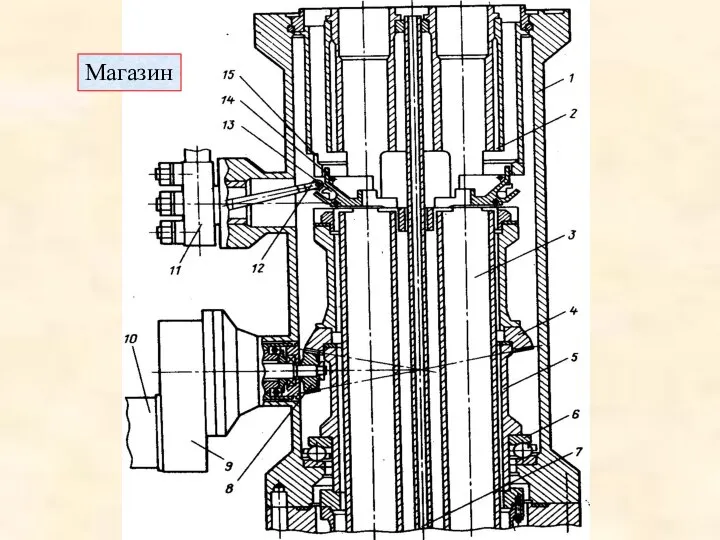
- 52. Магазин
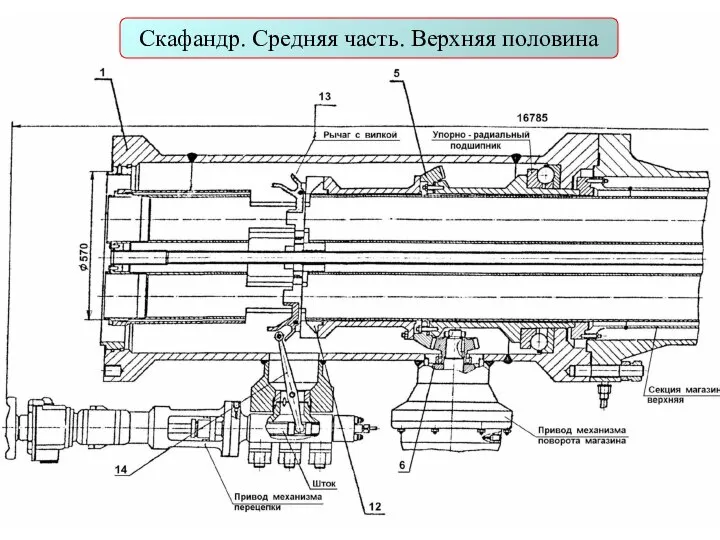
- 54. Скафандр. Средняя часть. Верхняя половина
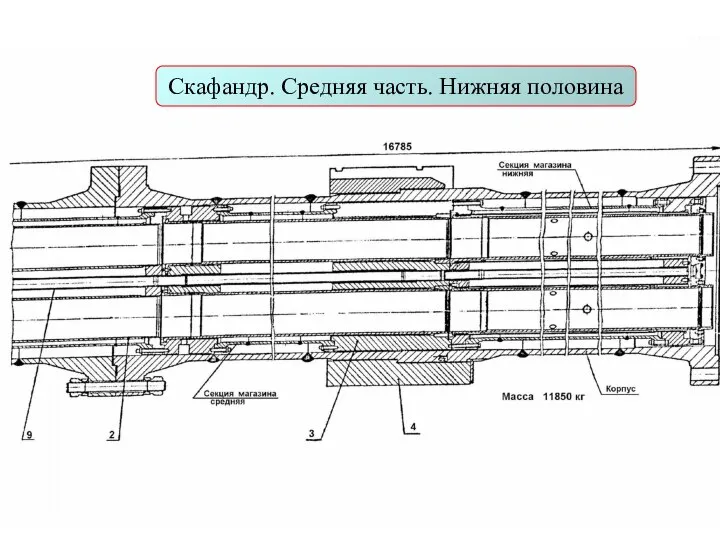
- 56. Скафандр. Средняя часть. Нижняя половина
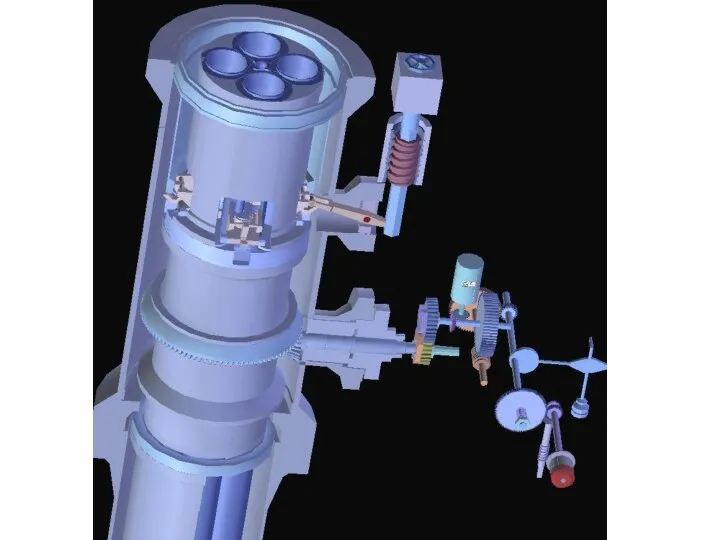
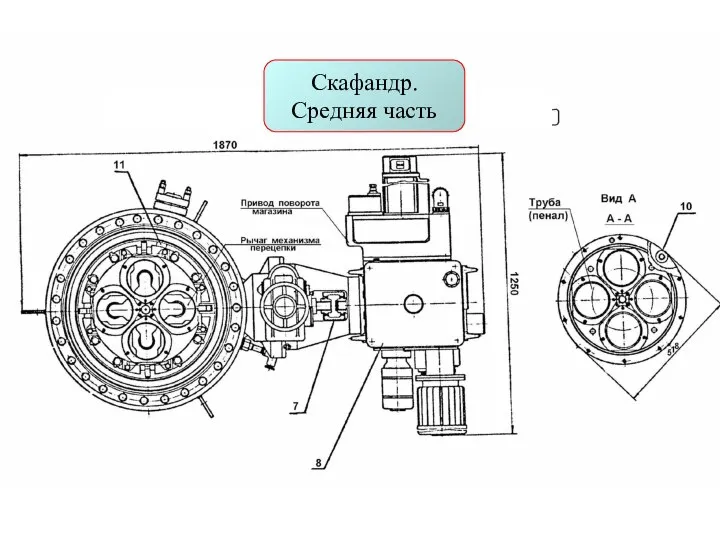
- 57. Скафандр. Средняя часть
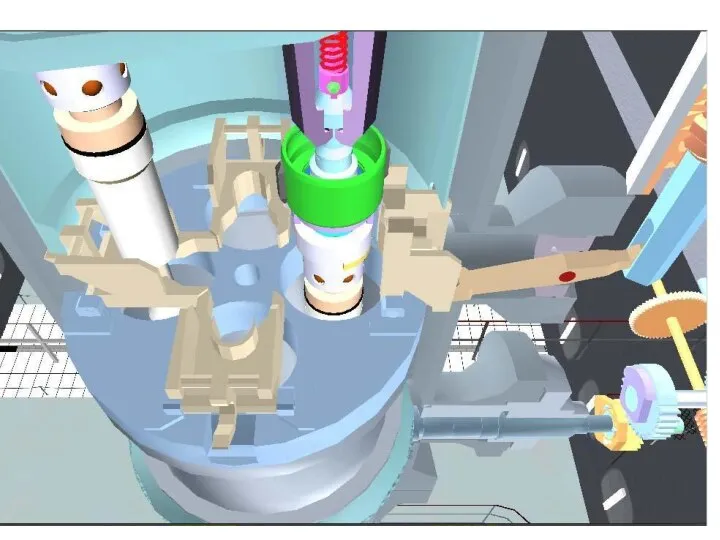
- 59. Магазин расположен внутри прочного корпуса 1 средней части скафандра и представляет собой тонкостенную составную трубу с
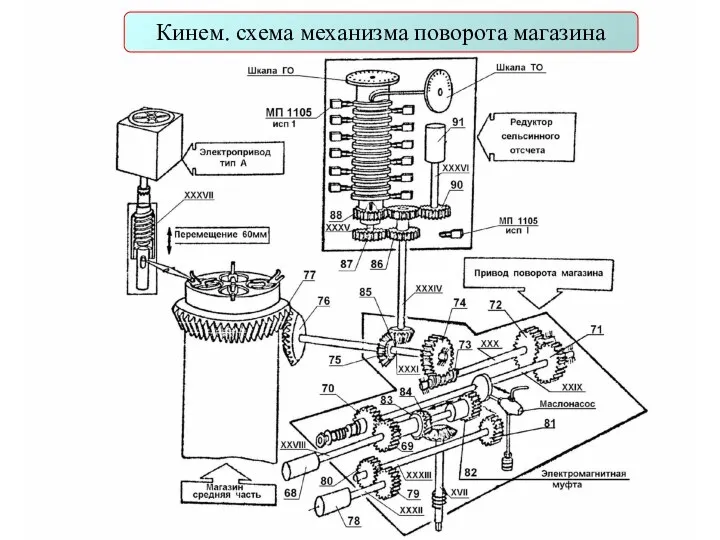
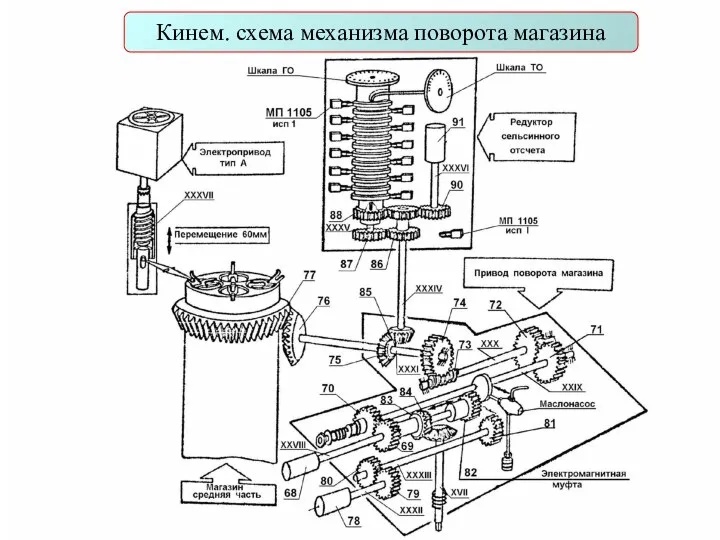
- 60. Кинем. схема механизма поворота магазина
- 61. Привод поворота магазина (488-07-0037). Привод представляет собой червячно - цилиндрический редуктор с двумя электродвигателями 68 и
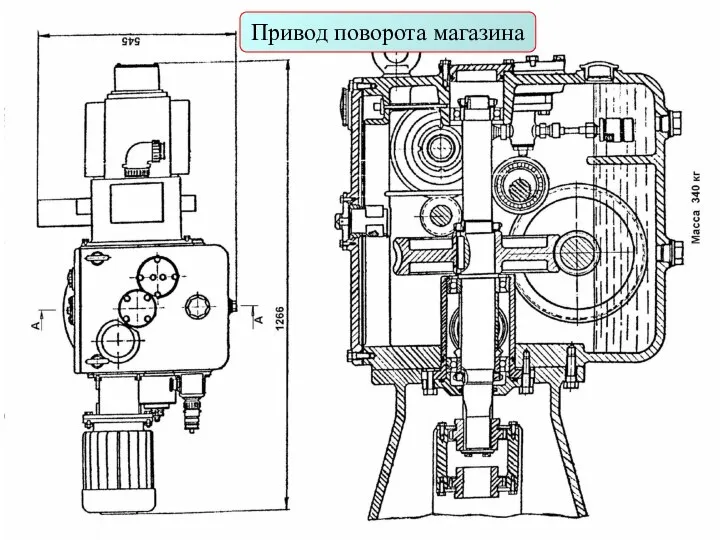
- 62. Привод поворота магазина
- 63. Привод имеет редуктор сельсинного отcчета, который выполняет функции командо - аппарата. Редуктор установлен на приводе поворота
- 64. Кроме того имеется рычаг с кулачками, воздействущими на отдельнный микропереключатель при положении каждого пенала над СП
- 65. Кинем. схема механизма поворота магазина
- 66. Привод механизма перецепки (488-07-0036). Привод механизма перецепки состоит из корпуса, в котором перемещаются винт и шток
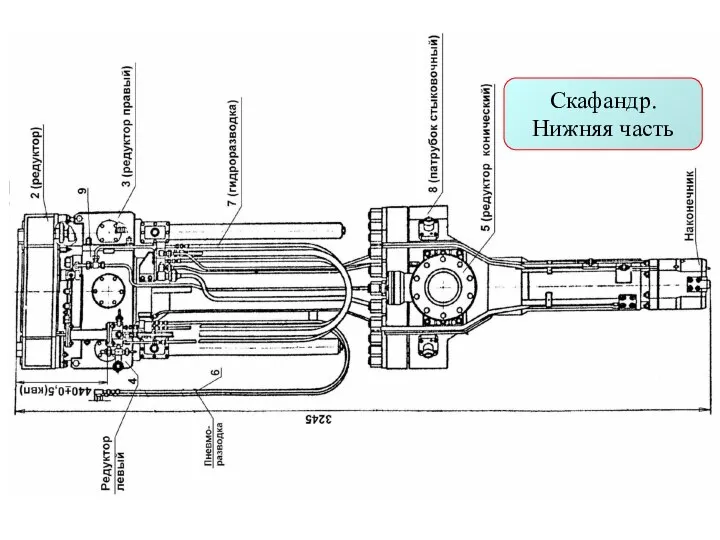
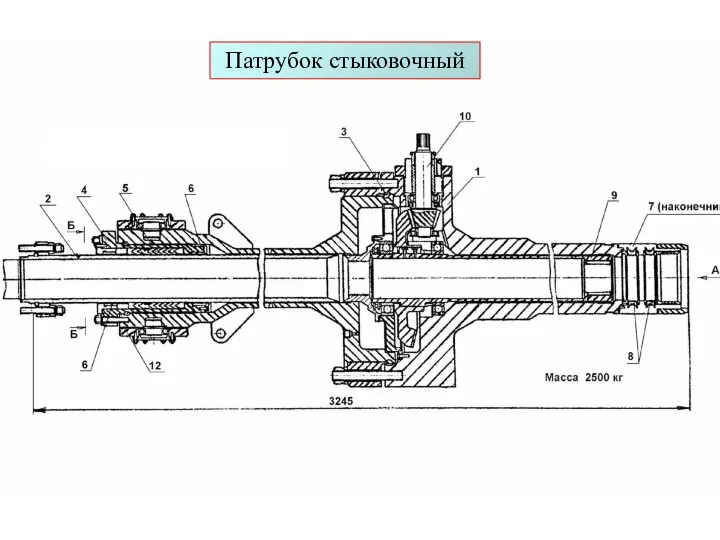
- 68. Стыковочный патрубок (488-16-0004) Стыковочный патрубок входит в состав нижней части скафандра (488-05-0005) и состоит из подвижкой
- 69. Подвижная часть перемещается по неподвижной трубе и по четырем направлящим, закрепленным в первой секции контейнера, при
- 70. Нижняя часть СП - наконечник 7 выполнен съемным для удобства при монтаже и эксплуатации. В наконечнике
- 71. Патрубок стыковочный
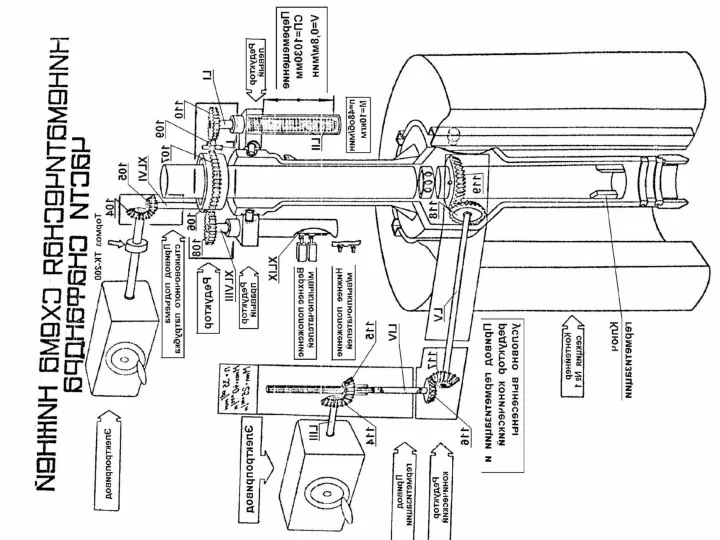
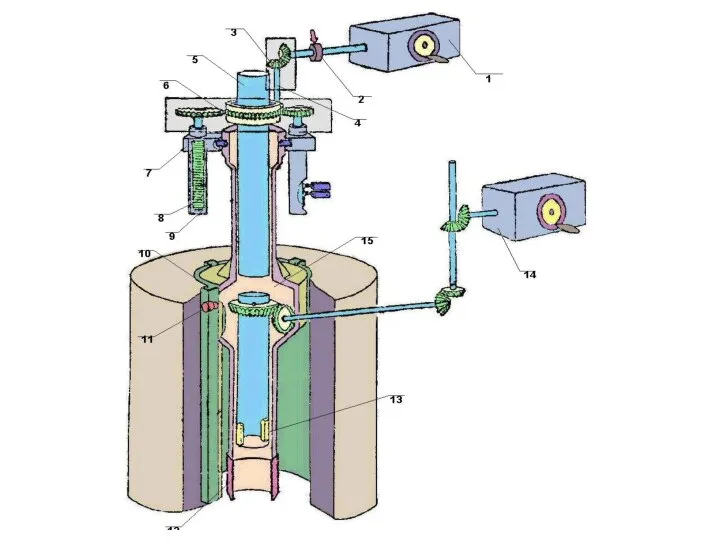
- 74. Внутри подвижного корпуса смонтирована коническая передача для приведения во вращение ключа герметизации(КГ) 9. КГ представляет собой
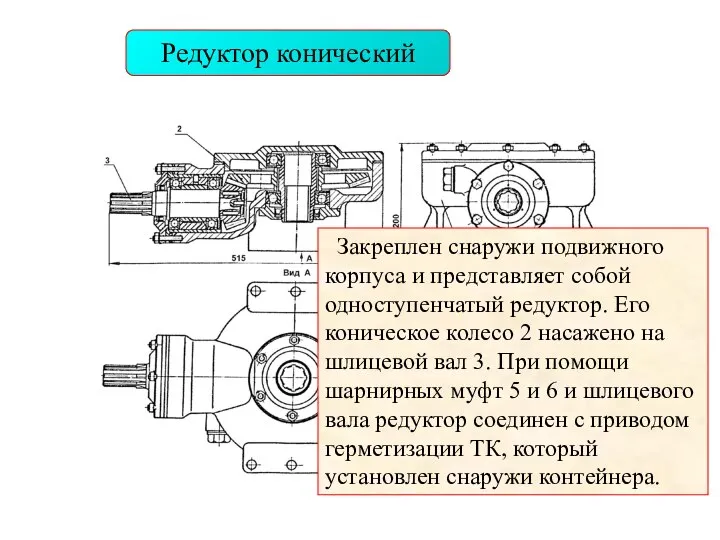
- 78. Редуктор конический Закреплен снаружи подвижного корпуса и представляет собой одноступенчатый редуктор. Его коническое колесо 2 насажено
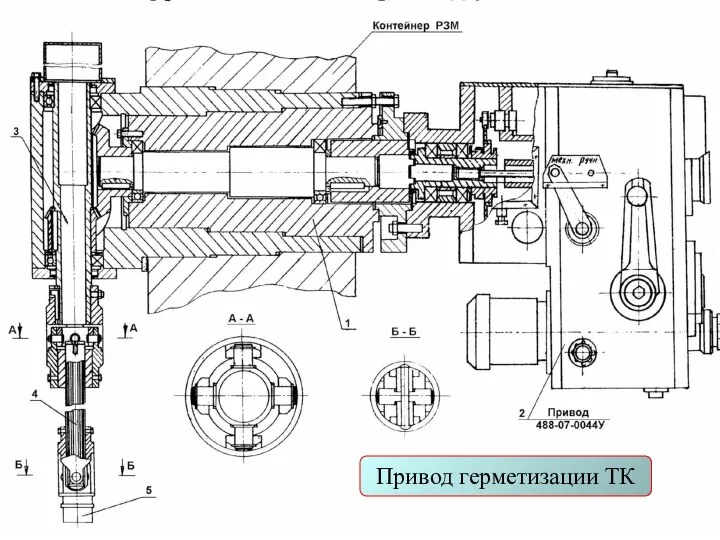
- 79. Привод герметизации ТК (488-07-0031). Привод герметизации ТК (см. рис. 24, 25) состоит из электропривода с двухсторонней
- 80. Привод герметизации ТК
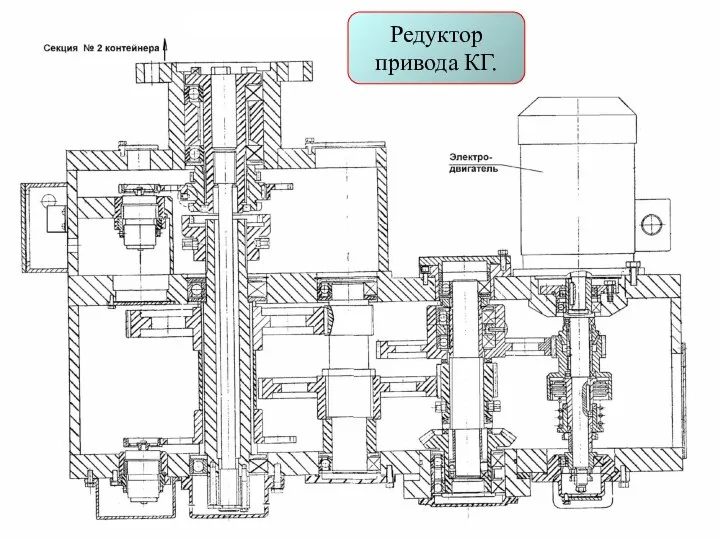
- 81. Редуктор привода КГ.
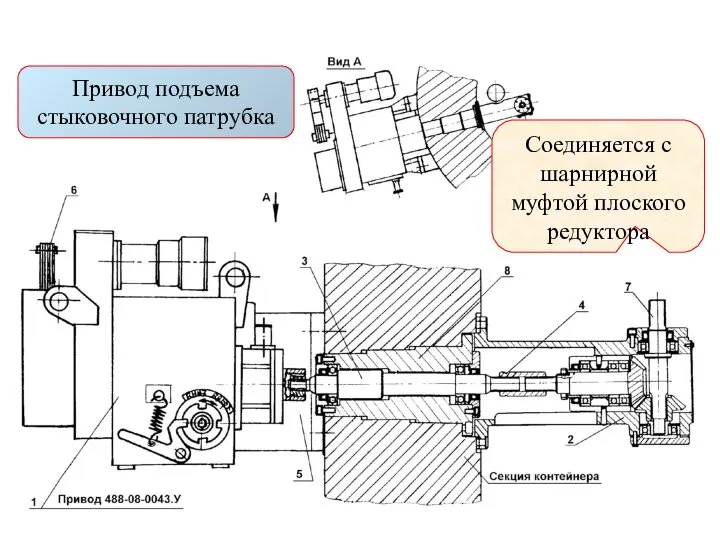
- 82. Привод подъема стыковочного патрубка (488-07-0029). Для перемещения СП применяется привод подъема стыковочного патрубка (рис. 26), установленный
- 83. Привод подъема стыковочного патрубка Соединяется с шарнирной муфтой плоского редуктора
- 84. Редуктор (плоский) Соединяется с приводом подъема СП
- 85. Редуктор (488-08-0006) (плоский). Редуктор 2 (рис. 20) прикреплен к нижнему торцу задвижки и предназначен для передачи
- 86. Редуктор левый
- 87. Редуктор левый (488-08-0015A). Редуктор (рис. 28) предназначен для преобразования вращательного движения винта в поступательное движение СП
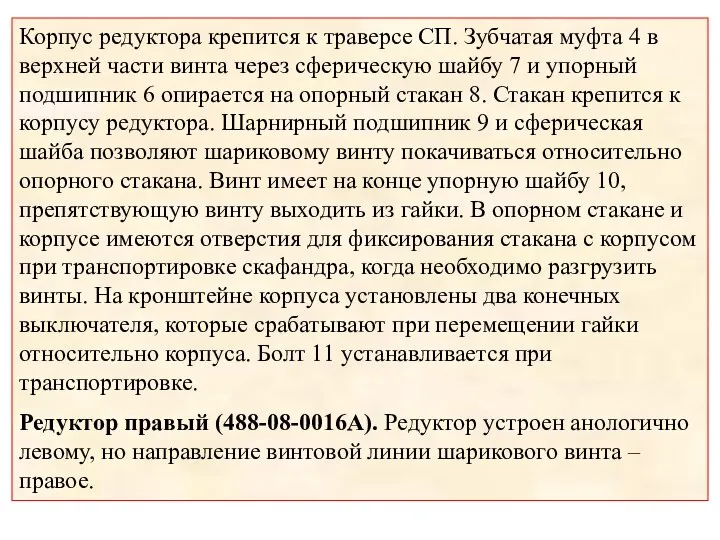
- 88. Корпус редуктора крепится к траверсе СП. Зубчатая муфта 4 в верхней части винта через сферическую шайбу
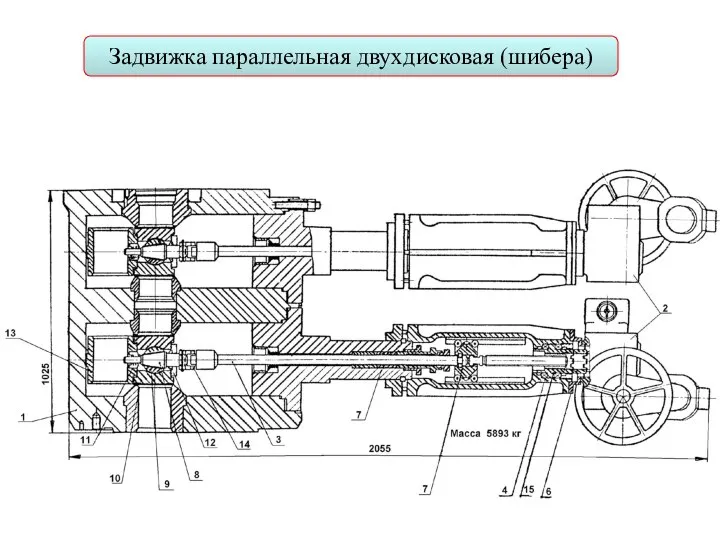
- 89. Задвижка параллельная двухдисковая (шибера)
- 90. Задвижка параллельная двухдисковая сдвоенная (A16001-01.150). Задвижка предназначена.для герметичного перекрытия внутренней полости скафандра. Привода задвижки электромеханические, вынесены
- 91. При закрытии задвижки движение от электропривода через кулачковую муфту 6 передается гайке 15 и далее преобразуется
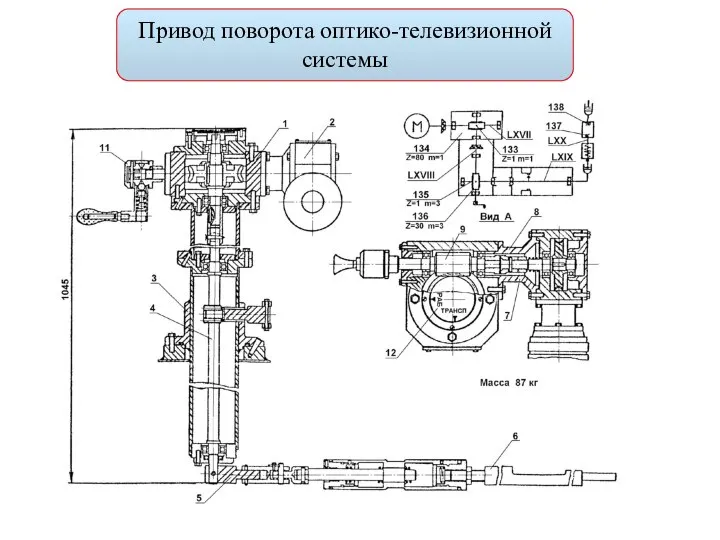
- 92. Привод поворота оптико-телевизионной системы
- 93. Оптический прибор (ПС 180). Оптический прибор (рис. 4, 5) представляет собой перископ с поворотной головной пентапризмой
- 94. Горизонтальная труба перископа закреплена в поворотной опоре 1 (рис. 5), которая укреплена в нише первой секции
- 95. Опора (488-83-0005). Опора предназначена для установки оптического прибора и поворота его в рабочее или транспортное положение.
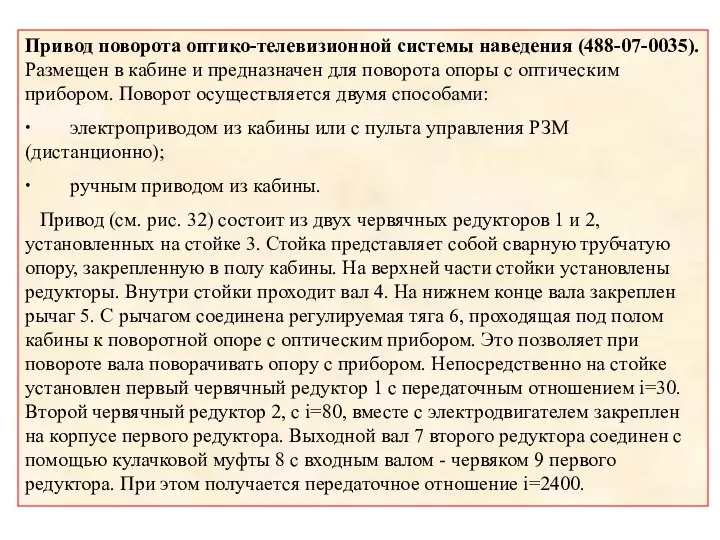
- 96. Привод поворота оптико-телевизионной системы наведения (488-07-0035). Размещен в кабине и предназначен для поворота опоры с оптическим
- 97. Вал - червяк первого редуктора выполнен полым. Через него проходит толкатель 10, выключающий кулачковую муфту при
- 100. Скачать презентацию

Слайд 3 Комплекс РЗМ
(Зоны обслуживания).
Для обеспечения работы РЗМ в ЦЗ предусмотрены следующие
Комплекс РЗМ
(Зоны обслуживания).
Для обеспечения работы РЗМ в ЦЗ предусмотрены следующие
Слайд 4Общий вид РЗМ
Общий вид РЗМ
Слайд 5 Разгрузочно-загрузочная машина РЗМ-488 ту 95.5068-76 предназначена для перегрузки ТК реактора РБМК-1000 с
Разгрузочно-загрузочная машина РЗМ-488 ту 95.5068-76 предназначена для перегрузки ТК реактора РБМК-1000 с
Слайд 6Состав РЗМ
Кран для РЗМ
Контейнер
Скафандр
Ферма
Технологический контур
Электроразводка
Системы наведения
Состав РЗМ
Кран для РЗМ
Контейнер
Скафандр
Ферма
Технологический контур
Электроразводка
Системы наведения
Слайд 7 Мостовой кран РЗМ состоит из моста и тележки.
Мост крана передвигается по
Мостовой кран РЗМ состоит из моста и тележки.
Мост крана передвигается по
Слайд 8Кран для РЗМ
Кран для РЗМ
Слайд 9 Контейнер в основном является биологической защитой.
Кроме того контейнер служит основанием для
Контейнер в основном является биологической защитой. Кроме того контейнер служит основанием для
Слайд 10 Двери секций №№ 1-6 навешиваются на петлях.
Каждая дверь открывается ручным
Двери секций №№ 1-6 навешиваются на петлях. Каждая дверь открывается ручным
Слайд 11Контейнер
4
Контейнер
4
Слайд 12Секция №1
Состоит из корпуса, подвижной биологической защиты, привода перемещения биозащиты и опоры
Секция №1
Состоит из корпуса, подвижной биологической защиты, привода перемещения биозащиты и опоры
Слайд 13Контейнер
секции
№ 1 и №7
Контейнер
секции
№ 1 и №7
Слайд 14Подвижная биологическая защита -
секция №7
Предназначена для перекрытия зазора между контейнером
Подвижная биологическая защита -
секция №7
Предназначена для перекрытия зазора между контейнером
Слайд 16Привод перемещения биозащиты
Привод перемещения биозащиты
Слайд 18Секция №2 состоит из корпуса с дверью, привода подъема СП и привода
Секция №2 состоит из корпуса с дверью, привода подъема СП и привода
Слайд 19Габариты секции №2 :
Диаметр 1900мм
Высота 2070мм
Масса 27000кг
Секция №3 состоит из корпуса с дверью.
Дверь секции
Габариты секции №2 :
Диаметр 1900мм
Высота 2070мм
Масса 27000кг
Секция №3 состоит из корпуса с дверью.
Дверь секции
Слайд 20 Секции №4, 5, 6 состоят из корпуса с дверью и отличаются
Секции №4, 5, 6 состоят из корпуса с дверью и отличаются

Слайд 21 Секции №8(«бублик») состоит из разъемного кольца с 4-мя выдвижными упорами, которые
Секции №8(«бублик») состоит из разъемного кольца с 4-мя выдвижными упорами, которые

Слайд 22 Кабина предназначена для размещения пульта управления мостом и тележкой при выводе
Кабина предназначена для размещения пульта управления мостом и тележкой при выводе

Слайд 23Конструктивно скафандр разделен на 4 основные части:
∙ Верхняя часть
∙ Средняя часть
∙ Задвижка
Конструктивно скафандр разделен на 4 основные части:
∙ Верхняя часть
∙ Средняя часть
∙ Задвижка
Слайд 24 Между средней и нижней частями расположено запорное устройство-задвижка параллельная двухдисковая сдвоенная.
Между средней и нижней частями расположено запорное устройство-задвижка параллельная двухдисковая сдвоенная.
Слайд 25 В верхней части скафандра размещена система извлечения и установки кассет. В
В верхней части скафандра размещена система извлечения и установки кассет. В
Слайд 26Скафандр. Верхняя часть.
Скафандр. Верхняя часть.
Слайд 28Система извлечения и установки кассет
Основные составные части:
∙ Корпус зведочек
∙ Привод подъема
Система извлечения и установки кассет
Основные составные части:
∙ Корпус зведочек
∙ Привод подъема
Слайд 29Кинем. схема верхней части скафандра
Кинем. схема верхней части скафандра
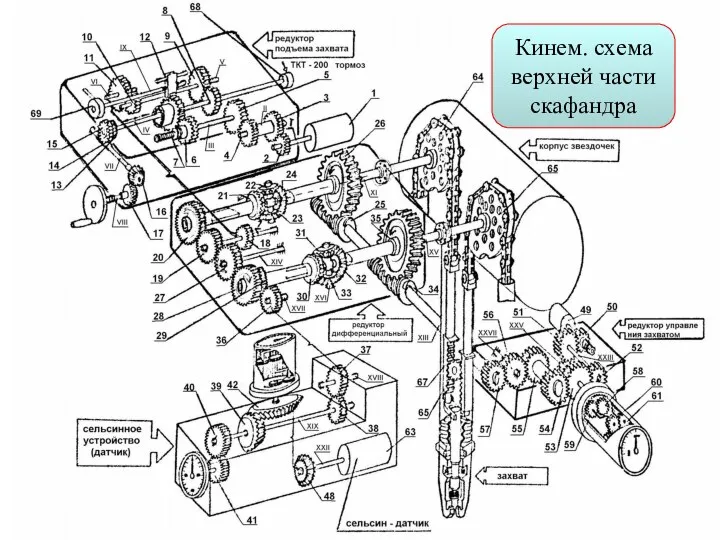
Слайд 30 Система в основном расположена в корпусе зведочек.
К корпусу с наружной
Система в основном расположена в корпусе зведочек.
К корпусу с наружной
Слайд 31 Звездочки соединены с приводом подъема захвата с помощью компенсирующих муфт. Все
Звездочки соединены с приводом подъема захвата с помощью компенсирующих муфт. Все
Слайд 32Корпус звездочек
Корпус звездочек представляет собой прочный герметичный корпус в виде цилиндра
Корпус звездочек
Корпус звездочек представляет собой прочный герметичный корпус в виде цилиндра

Слайд 36 Перемещение захвата осуществляется по программе (алгоритму). При подходе захвата к головке
Перемещение захвата осуществляется по программе (алгоритму). При подходе захвата к головке
Слайд 37Механическая
часть СКС
Механическая
часть СКС
Слайд 38Привод подъема захвата
Привод подъема захвата
Слайд 39Привод подъема захвата ( 488-07-0038).
Привод совместно с дифференциальным редуктором осуществляет подъем
Привод подъема захвата ( 488-07-0038).
Привод совместно с дифференциальным редуктором осуществляет подъем
Слайд 40Кинем. схема верхней части скафандра
Кинем. схема верхней части скафандра
Слайд 41В приводе подъема захвата имеется ручной дублер привода. Переключение с механического перемещения
В приводе подъема захвата имеется ручной дублер привода. Переключение с механического перемещения

Слайд 43Редуктор управления захватом
Редуктор управления захватом
Слайд 44Редуктор управления захватом (488-08-0017).
Редуктор предназначен для открывания и закрытия захвата и
Редуктор управления захватом (488-08-0017).
Редуктор предназначен для открывания и закрытия захвата и
Слайд 45Редуктор дифференциальный
Редуктор дифференциальный
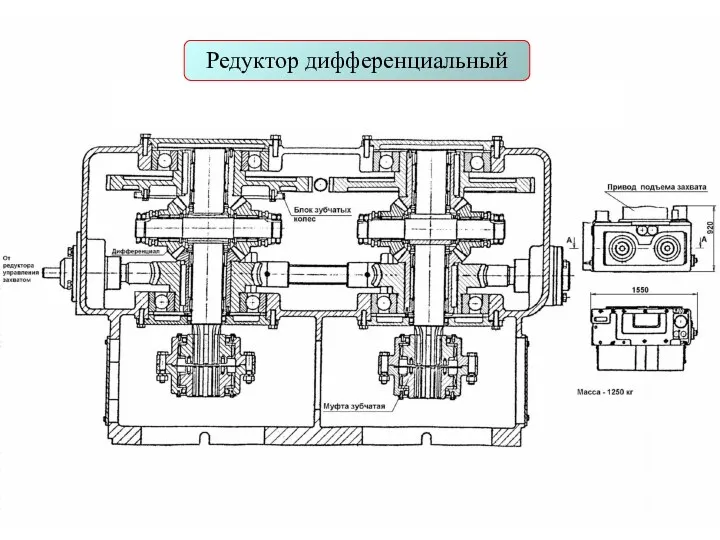
Слайд 46Редуктор дифференциальный (488-06-0014).
Редуктор предназначен для передачи движения от привода подъема захвата
Редуктор дифференциальный (488-06-0014).
Редуктор предназначен для передачи движения от привода подъема захвата
Слайд 47Захват (KM-120-50-0001).
Захват предназначен для удерживания специзделий при их установке и извлечении
Захват (KM-120-50-0001).
Захват предназначен для удерживания специзделий при их установке и извлечении
Слайд 49Цепь (488-23-0003К).
В сиcтеме извлечения и установки специзделий применены две цепи, которые
Цепь (488-23-0003К).
В сиcтеме извлечения и установки специзделий применены две цепи, которые
Слайд 50Сельсинное устройство (488-09-0023).
Сельсинное устройство – датчик, предназначенный для дистанционного контроля за
Сельсинное устройство (488-09-0023).
Сельсинное устройство – датчик, предназначенный для дистанционного контроля за
Слайд 51Система контроля сил (CKС).
Система контроля сил предназначена для контроля усилий, возникающих
Система контроля сил (CKС).
Система контроля сил предназначена для контроля усилий, возникающих
Слайд 52Магазин
Магазин

Слайд 54Скафандр. Средняя часть. Верхняя половина
Скафандр. Средняя часть. Верхняя половина
Слайд 56Скафандр. Средняя часть. Нижняя половина
Скафандр. Средняя часть. Нижняя половина
Слайд 57Скафандр. Средняя часть
Скафандр. Средняя часть
Слайд 59 Магазин расположен внутри прочного корпуса 1 средней части скафандра и представляет
Магазин расположен внутри прочного корпуса 1 средней части скафандра и представляет
Слайд 60Кинем. схема механизма поворота магазина
Кинем. схема механизма поворота магазина
Слайд 61Привод поворота магазина (488-07-0037).
Привод представляет собой червячно - цилиндрический редуктор с двумя
Привод поворота магазина (488-07-0037).
Привод представляет собой червячно - цилиндрический редуктор с двумя
Слайд 62Привод поворота магазина
Привод поворота магазина
Слайд 63Привод имеет редуктор сельсинного отcчета, который выполняет функции командо - аппарата. Редуктор
Привод имеет редуктор сельсинного отcчета, который выполняет функции командо - аппарата. Редуктор
Слайд 64 Кроме того имеется рычаг с кулачками, воздействущими на отдельнный микропереключатель при
Кроме того имеется рычаг с кулачками, воздействущими на отдельнный микропереключатель при
Слайд 65Кинем. схема механизма поворота магазина
Кинем. схема механизма поворота магазина
Слайд 66Привод механизма перецепки (488-07-0036).
Привод механизма перецепки состоит из корпуса, в котором
Привод механизма перецепки (488-07-0036).
Привод механизма перецепки состоит из корпуса, в котором
Слайд 68Стыковочный патрубок (488-16-0004)
Стыковочный патрубок входит в состав нижней части скафандра (488-05-0005)
Стыковочный патрубок (488-16-0004)
Стыковочный патрубок входит в состав нижней части скафандра (488-05-0005)
Слайд 69 Подвижная часть перемещается по неподвижной трубе и по четырем направлящим, закрепленным
Подвижная часть перемещается по неподвижной трубе и по четырем направлящим, закрепленным
Слайд 70 Нижняя часть СП - наконечник 7 выполнен съемным для удобства при
Нижняя часть СП - наконечник 7 выполнен съемным для удобства при
Слайд 71Патрубок стыковочный
Патрубок стыковочный


Слайд 74 Внутри подвижного корпуса смонтирована коническая передача для приведения во вращение ключа
Внутри подвижного корпуса смонтирована коническая передача для приведения во вращение ключа

Слайд 78Редуктор конический
Закреплен снаружи подвижного корпуса и представляет собой одноступенчатый редуктор. Его
Редуктор конический
Закреплен снаружи подвижного корпуса и представляет собой одноступенчатый редуктор. Его
Слайд 79Привод герметизации ТК (488-07-0031).
Привод герметизации ТК (см. рис. 24, 25) состоит
Привод герметизации ТК (488-07-0031).
Привод герметизации ТК (см. рис. 24, 25) состоит
Слайд 80Привод герметизации ТК
Привод герметизации ТК
Слайд 81Редуктор привода КГ.
Редуктор привода КГ.
Слайд 82Привод подъема стыковочного патрубка (488-07-0029).
Для перемещения СП применяется привод подъема стыковочного патрубка
Привод подъема стыковочного патрубка (488-07-0029).
Для перемещения СП применяется привод подъема стыковочного патрубка
Слайд 83Привод подъема стыковочного патрубка
Соединяется с шарнирной муфтой плоского редуктора
Привод подъема стыковочного патрубка
Соединяется с шарнирной муфтой плоского редуктора
Слайд 84Редуктор (плоский)
Соединяется с приводом подъема СП
Редуктор (плоский)
Соединяется с приводом подъема СП
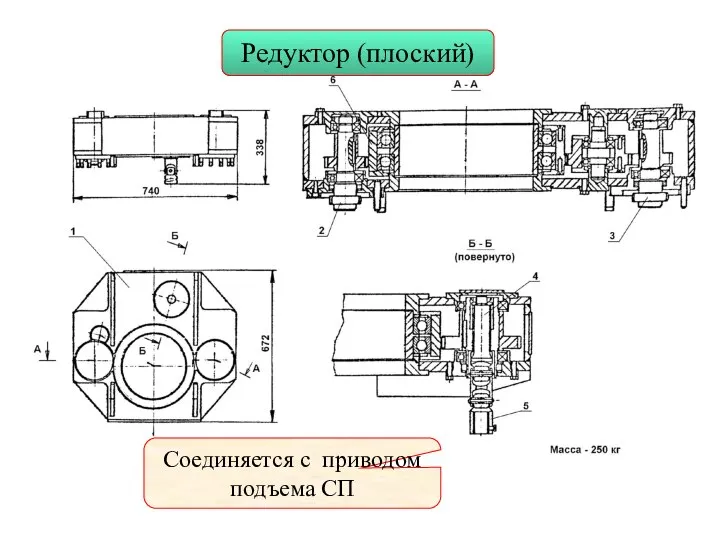
Слайд 85Редуктор (488-08-0006) (плоский).
Редуктор 2 (рис. 20) прикреплен к нижнему торцу задвижки
Редуктор (488-08-0006) (плоский).
Редуктор 2 (рис. 20) прикреплен к нижнему торцу задвижки
Слайд 86Редуктор левый
Редуктор левый
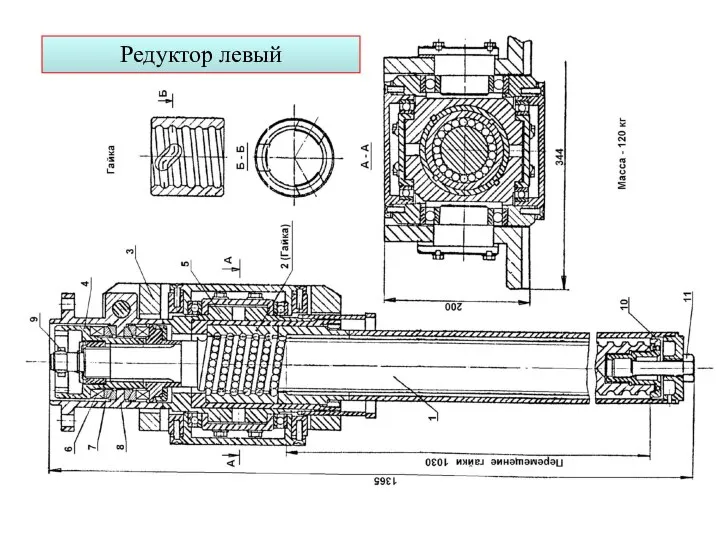
Слайд 87Редуктор левый (488-08-0015A).
Редуктор (рис. 28) предназначен для преобразования вращательного движения винта в
Редуктор левый (488-08-0015A).
Редуктор (рис. 28) предназначен для преобразования вращательного движения винта в
Слайд 88Корпус редуктора крепится к траверсе СП. Зубчатая муфта 4 в верхней части
Корпус редуктора крепится к траверсе СП. Зубчатая муфта 4 в верхней части
Слайд 89Задвижка параллельная двухдисковая (шибера)
Задвижка параллельная двухдисковая (шибера)
Слайд 90Задвижка параллельная двухдисковая сдвоенная (A16001-01.150).
Задвижка предназначена.для герметичного перекрытия внутренней полости скафандра.
Привода задвижки
Задвижка параллельная двухдисковая сдвоенная (A16001-01.150).
Задвижка предназначена.для герметичного перекрытия внутренней полости скафандра.
Привода задвижки
Слайд 91При закрытии задвижки движение от электропривода через кулачковую муфту 6 передается гайке
При закрытии задвижки движение от электропривода через кулачковую муфту 6 передается гайке
Слайд 92Привод поворота оптико-телевизионной системы
Привод поворота оптико-телевизионной системы
Слайд 93Оптический прибор (ПС 180).
Оптический прибор (рис. 4, 5) представляет собой перископ с
Оптический прибор (ПС 180).
Оптический прибор (рис. 4, 5) представляет собой перископ с
Слайд 94 Горизонтальная труба перископа закреплена в поворотной опоре 1 (рис. 5), которая
Горизонтальная труба перископа закреплена в поворотной опоре 1 (рис. 5), которая
Слайд 95Опора (488-83-0005).
Опора предназначена для установки оптического прибора и поворота его в рабочее
Опора (488-83-0005).
Опора предназначена для установки оптического прибора и поворота его в рабочее
Слайд 96Привод поворота оптико-телевизионной системы наведения (488-07-0035). Размещен в кабине и предназначен для
Привод поворота оптико-телевизионной системы наведения (488-07-0035). Размещен в кабине и предназначен для
Слайд 97 Вал - червяк первого редуктора выполнен полым. Через него проходит толкатель
Вал - червяк первого редуктора выполнен полым. Через него проходит толкатель
 Christmas what are they doing fun
Christmas what are they doing fun Чарльз Лэндри, автор книги «Креативный город»: «В ближайшие десятилетия сохранится лишь один из трех городов». 22 марта 2011, Цент
Чарльз Лэндри, автор книги «Креативный город»: «В ближайшие десятилетия сохранится лишь один из трех городов». 22 марта 2011, Цент Научный образовательный центр «Модернизация многомерного социально-политического пространства современной России» Руководит
Научный образовательный центр «Модернизация многомерного социально-политического пространства современной России» Руководит Совместная жизнь видов в биогеоценозе
Совместная жизнь видов в биогеоценозе Задачи на движение
Задачи на движение ПРЕДУПРЕДИТЬ – ЗНАЧИТ СПАСТИ
ПРЕДУПРЕДИТЬ – ЗНАЧИТ СПАСТИ Автономная нервная система
Автономная нервная система  Палагайская школа вчера, сегодня, завтра
Палагайская школа вчера, сегодня, завтра Виды треугольников 3 класс
Виды треугольников 3 класс Мировой кризис и нефтяной рынок
Мировой кризис и нефтяной рынок 10 заблуждений относительно цены
10 заблуждений относительно цены ФГБУ Минмелиоводхоз РД. Министерство мелиорации земель и сельскохозяйственного водоснабжения Республики Дагестан
ФГБУ Минмелиоводхоз РД. Министерство мелиорации земель и сельскохозяйственного водоснабжения Республики Дагестан Вложенные циклы
Вложенные циклы ПРОЕКТ
ПРОЕКТ Отчёт по книге Искусство быть собой В.Л. Леви
Отчёт по книге Искусство быть собой В.Л. Леви Сложные придаточные предложения (турецкий язык, урок №28)
Сложные придаточные предложения (турецкий язык, урок №28) Организация обслуживания в общественном питании. Состояние потребительского рынка и перспективы развития индустрии питания
Организация обслуживания в общественном питании. Состояние потребительского рынка и перспективы развития индустрии питания Изменение архитектуры сибирских городов
Изменение архитектуры сибирских городов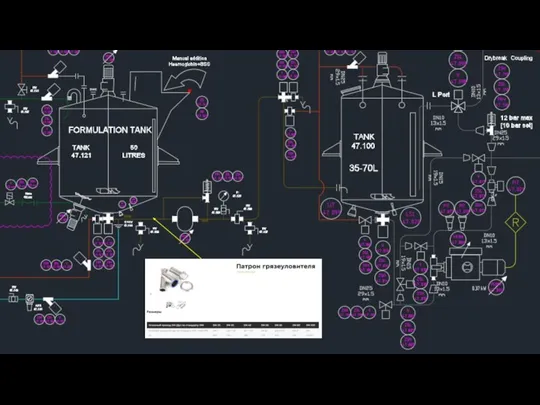 Патрон грязеуловителя
Патрон грязеуловителя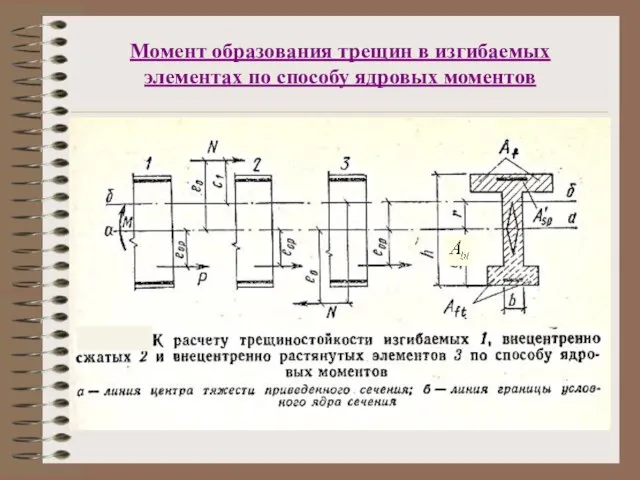 Момент образования трещин в изгибаемых элементах по способу ядровых моментов
Момент образования трещин в изгибаемых элементах по способу ядровых моментов Музей городской скульптуры
Музей городской скульптуры «Сюжеты» и «герои» музыкальной формы
«Сюжеты» и «герои» музыкальной формы Презентация на тему: Ради памяти родных
Презентация на тему: Ради памяти родных источники+права
источники+права Презентация на тему Афганская война
Презентация на тему Афганская война  Центросоюз РФ. Предприятия собственного хозяйства центросоюза. Система потребительской кооперации Карелии
Центросоюз РФ. Предприятия собственного хозяйства центросоюза. Система потребительской кооперации Карелии http://www.gilev.ru
http://www.gilev.ru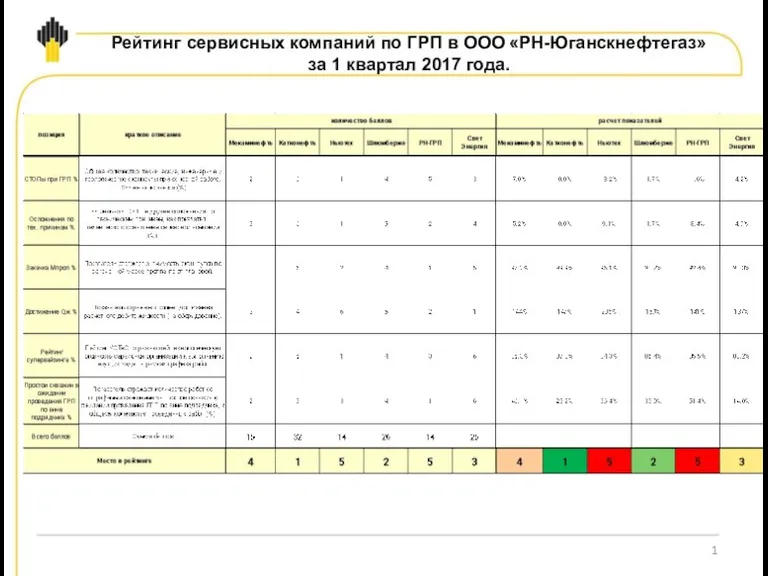 Рейтинг подрядчиков по ГРП за 1-й квартал 2017 года
Рейтинг подрядчиков по ГРП за 1-й квартал 2017 года