- Лекция 1. Математические методы планирования риска

Содержание
- 2. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 Литература Моделирование рисковых ситуаций в экономике и
- 3. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Функция полезности в условиях риска Пусть
- 4. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Наименьший возможный убыток – вариант A
- 5. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Существует ли общее правило выбора? Ответ
- 6. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Для рискового выбора существует безрисковый эквивалент:
- 7. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Существует правило задания выбора, равноценного любому
- 8. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Аксиомам Неймана-Моргенштерна отвечает правило принятия решения
- 9. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Функция u (.) выпукла, если из
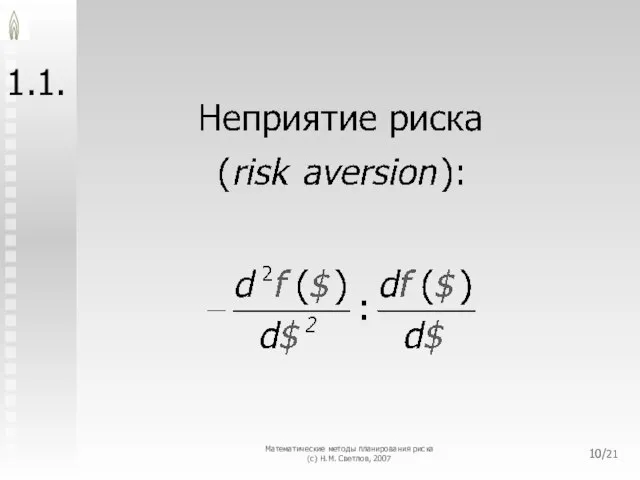
- 10. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1.
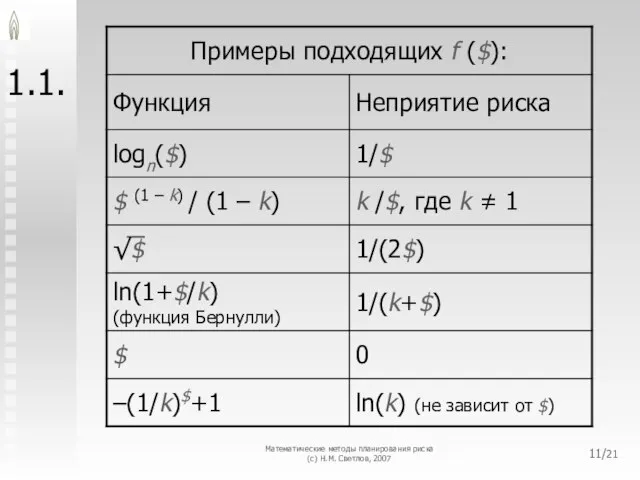
- 11. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1.
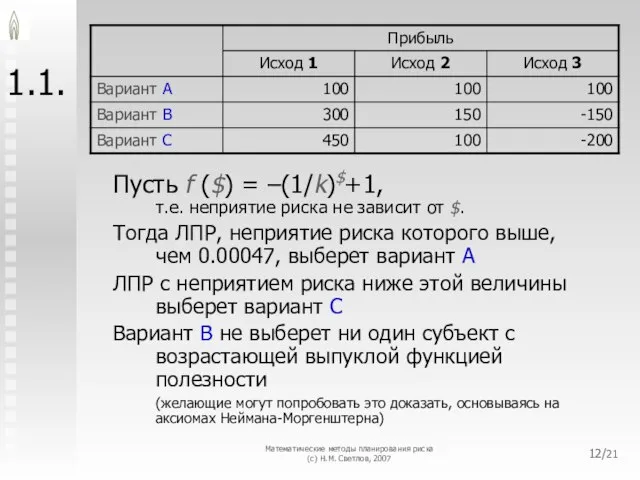
- 12. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.1. Пусть f ($) = –(1/k)$+1, т.е.
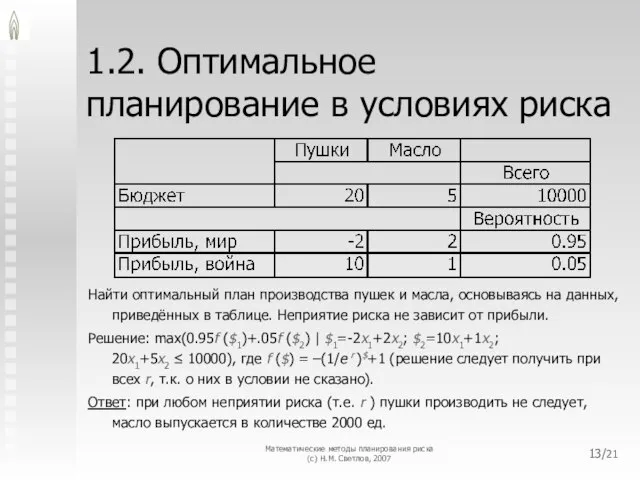
- 13. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.2. Оптимальное планирование в условиях риска Найти
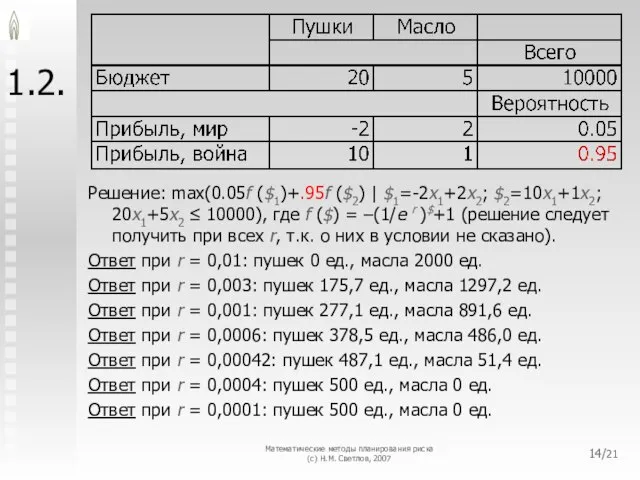
- 14. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.2. Решение: max(0.05f ($1)+.95f ($2) | $1=-2x1+2x2;
- 15. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.3. Подготовка исходных данных о риске Вероятность
- 16. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.3. Подготовка исходных данных о риске Вероятность
- 17. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.3. Подготовка исходных данных о риске Вероятность
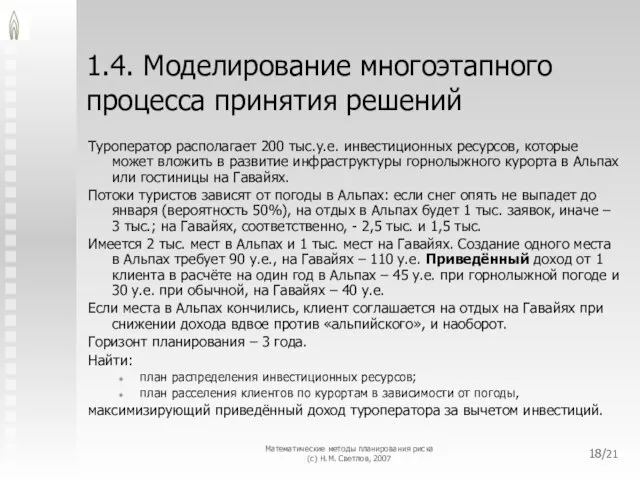
- 18. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.4. Моделирование многоэтапного процесса принятия решений Туроператор
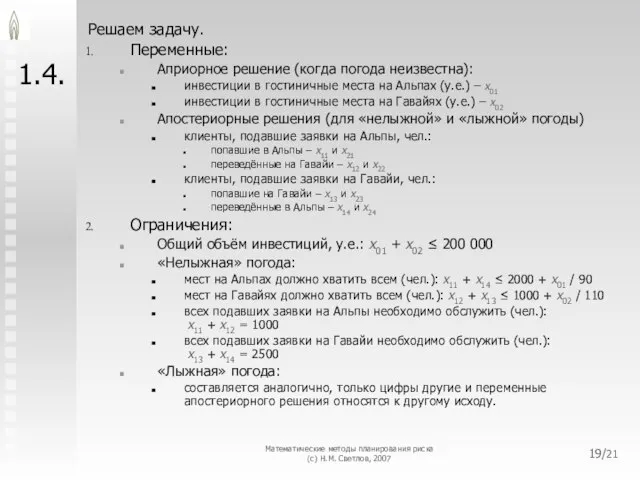
- 19. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.4. Решаем задачу. Переменные: Априорное решение (когда
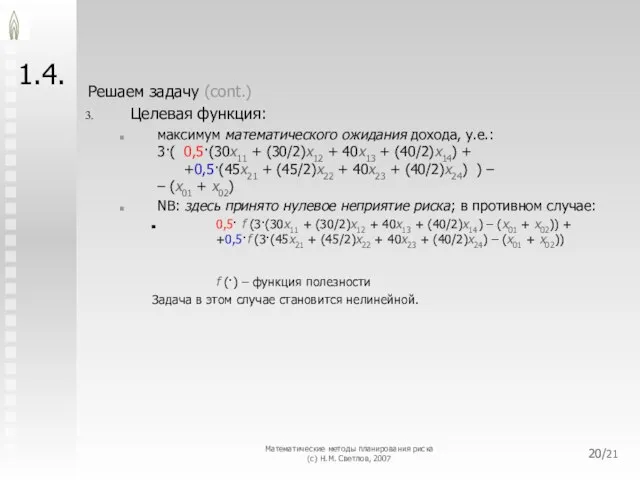
- 20. Математические методы планирования риска (с) Н.М. Светлов, 2007 /21 1.4. Решаем задачу (cont.) Целевая функция: максимум
- 22. Скачать презентацию
Слайд 2Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
Литература
Моделирование рисковых ситуаций в экономике и
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
Литература
Моделирование рисковых ситуаций в экономике и
Слайд 3Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
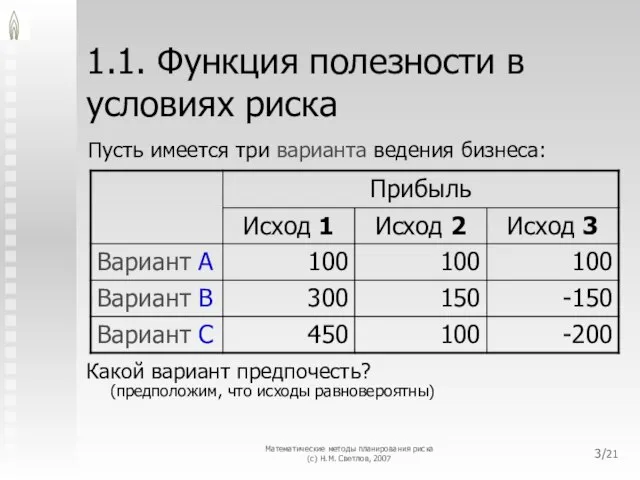
1.1. Функция полезности в условиях риска
Пусть
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1. Функция полезности в условиях риска
Пусть
Слайд 4Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
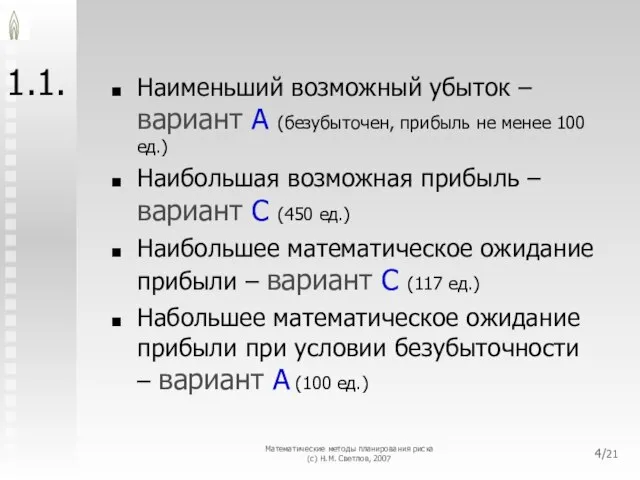
1.1.
Наименьший возможный убыток – вариант A
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Наименьший возможный убыток – вариант A
Слайд 5Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
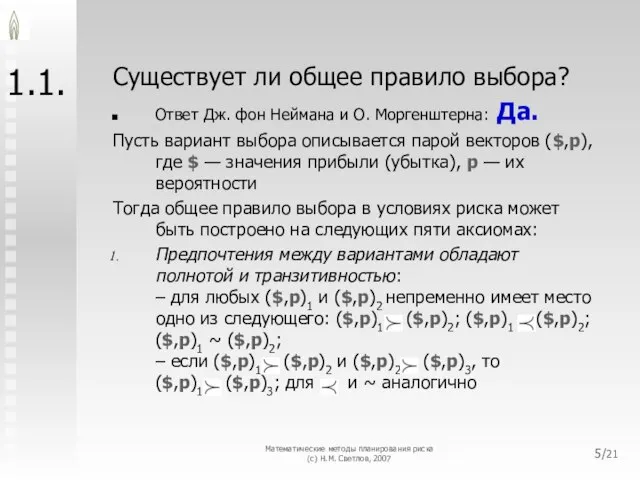
Существует ли общее правило выбора?
Ответ Дж.
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Существует ли общее правило выбора?
Ответ Дж.
Слайд 6Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Для рискового выбора существует безрисковый эквивалент:
Пусть
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Для рискового выбора существует безрисковый эквивалент: Пусть
Слайд 7Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Существует правило задания выбора, равноценного любому
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Существует правило задания выбора, равноценного любому
Слайд 8Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Аксиомам Неймана-Моргенштерна отвечает правило принятия решения
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Аксиомам Неймана-Моргенштерна отвечает правило принятия решения
Слайд 9Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Функция u (.) выпукла, если из
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Функция u (.) выпукла, если из
Слайд 10Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Слайд 11Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Слайд 12Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Пусть f ($) = –(1/k)$+1,
т.е. неприятие
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.1.
Пусть f ($) = –(1/k)$+1, т.е. неприятие
Слайд 13Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.2. Оптимальное планирование в условиях риска
Найти
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.2. Оптимальное планирование в условиях риска
Найти
Слайд 14Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.2.
Решение: max(0.05f ($1)+.95f ($2) | $1=-2x1+2x2;
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.2.
Решение: max(0.05f ($1)+.95f ($2) | $1=-2x1+2x2;
Слайд 15Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Слайд 16Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Слайд 17Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.3. Подготовка исходных данных о риске
Вероятность
Слайд 18Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4. Моделирование многоэтапного процесса принятия решений
Туроператор
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4. Моделирование многоэтапного процесса принятия решений
Туроператор
Слайд 19Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4.
Решаем задачу.
Переменные:
Априорное решение (когда погода
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4.
Решаем задачу.
Переменные:
Априорное решение (когда погода
Слайд 20Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4.
Решаем задачу (cont.)
Целевая функция:
максимум математического
Математические методы планирования риска
(с) Н.М. Светлов, 2007
/21
1.4.
Решаем задачу (cont.)
Целевая функция:
максимум математического
 Экосистема Байкала
Экосистема Байкала Фабрика пилотирования проектов национальной технологической инициативы и цифровой экономики
Фабрика пилотирования проектов национальной технологической инициативы и цифровой экономики Велосипедные походы и безопасность туристов
Велосипедные походы и безопасность туристов Моя кам'янка-дніпровська
Моя кам'янка-дніпровська ТП «Медицина будущего» как инструмент для ответа на современные технологические вызовы. Арктическая медицина. _______________________________
ТП «Медицина будущего» как инструмент для ответа на современные технологические вызовы. Арктическая медицина. _______________________________ Формирование целостной личности, творчески развитой индивидуальности средствами музыкального искусства.
Формирование целостной личности, творчески развитой индивидуальности средствами музыкального искусства. Модернизация технической базы (машинных дворов) и ремонтных мастерских сельскохозяйственных предприятий и других агропромышле
Модернизация технической базы (машинных дворов) и ремонтных мастерских сельскохозяйственных предприятий и других агропромышле Анероидно-мембранные приборы
Анероидно-мембранные приборы Сертификат защита-365. Защита портативной техники от случайных повреждений и кражи
Сертификат защита-365. Защита портативной техники от случайных повреждений и кражи Магическая сила слова
Магическая сила слова Графическое приложение к Требованиям № 3 редактируемый формат
Графическое приложение к Требованиям № 3 редактируемый формат Irregular verbs Practice
Irregular verbs Practice Управление персоналомTempus JEP - 27081 - 2006 «Поддержка и продвижение активного внедрения ИКТ в университетское управление в российских
Управление персоналомTempus JEP - 27081 - 2006 «Поддержка и продвижение активного внедрения ИКТ в университетское управление в российских  Принятие к учету по КФО 2
Принятие к учету по КФО 2 Модем и его функции
Модем и его функции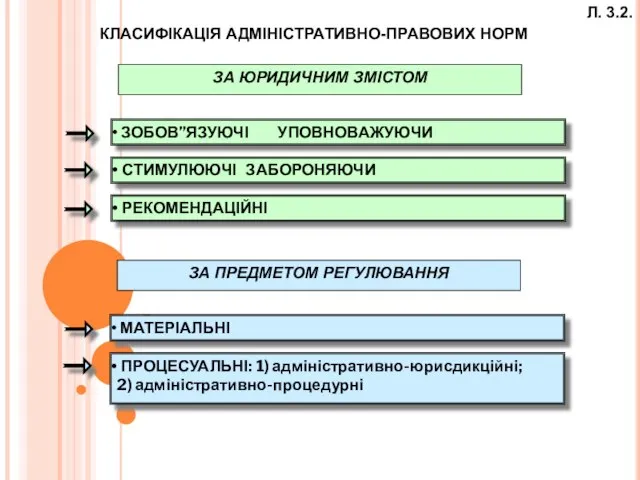 Класифікація адміністративно-правових норм за юридичним змістом
Класифікація адміністративно-правових норм за юридичним змістом Презентация на тему Статическая и динамическая механика легких
Презентация на тему Статическая и динамическая механика легких  Словообразование в китайском языке
Словообразование в китайском языке Основные документы, сопровождающие логистический процесс
Основные документы, сопровождающие логистический процесс одготовка будущих учителей к психолого-педагогическому сопровождению детей с особыми образовательными потребностями
одготовка будущих учителей к психолого-педагогическому сопровождению детей с особыми образовательными потребностями Отчет по дистанционному обучению
Отчет по дистанционному обучению Лакокрасочные покрытия в авторемонтном производстве
Лакокрасочные покрытия в авторемонтном производстве Проблемы и перспективы реализации принципов государственного управления в России
Проблемы и перспективы реализации принципов государственного управления в России ЗАО «РЕАТРЕК» Разработка технологии, организация производства и широкомасштабное внедрение структурно и химически модифиц
ЗАО «РЕАТРЕК» Разработка технологии, организация производства и широкомасштабное внедрение структурно и химически модифиц Love the bike
Love the bike Богучарская СОШ №1Региональное МО учителейИЗО, МХК, черчения и музыки
Богучарская СОШ №1Региональное МО учителейИЗО, МХК, черчения и музыки ИНСТИТУТ ТЕОРЕТИЧЕСКОЙ И ПРИКЛАДНОЙ ХИМИИ Архангельск 2012
ИНСТИТУТ ТЕОРЕТИЧЕСКОЙ И ПРИКЛАДНОЙ ХИМИИ Архангельск 2012 Искусственные волокна
Искусственные волокна