- Основы автоматического управления

Содержание
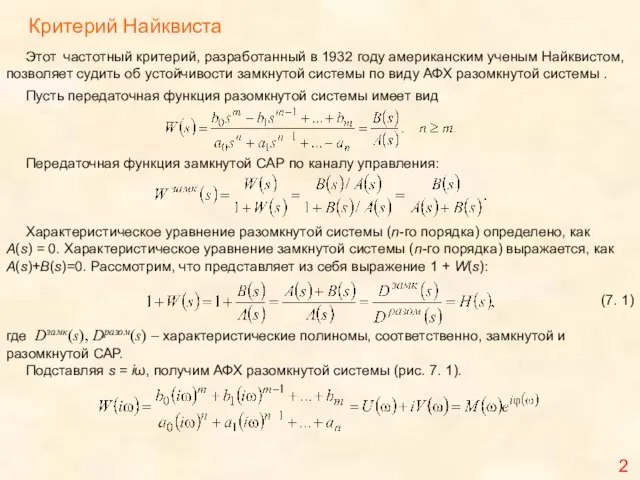
- 2. Пусть передаточная функция разомкнутой системы имеет вид Передаточная функция замкнутой САР по каналу управления: Характеристическое уравнение
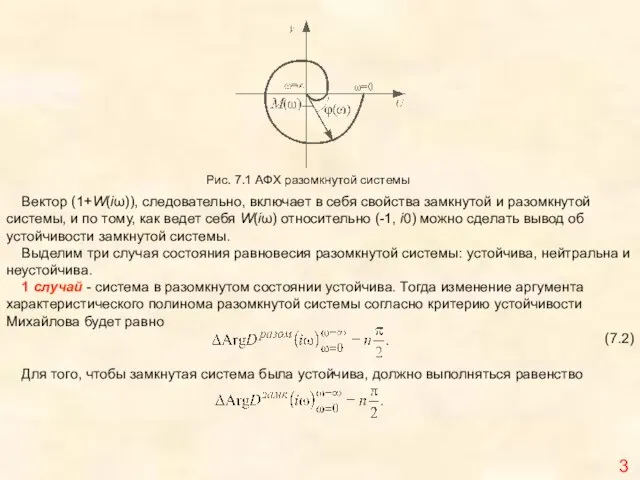
- 3. 3 Рис. 7.1 АФХ разомкнутой системы Вектор (1+W(iω)), следовательно, включает в себя свойства замкнутой и разомкнутой
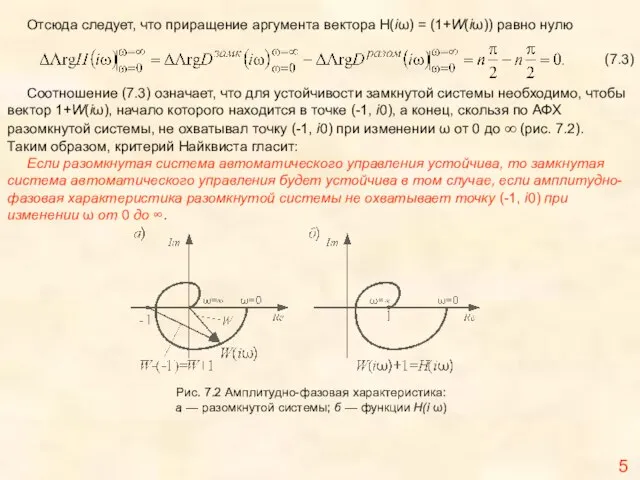
- 4. 5 Отсюда следует, что приращение аргумента вектора H(iω) = (1+W(iω)) равно нулю (7.3) Соотношение (7.3) означает,
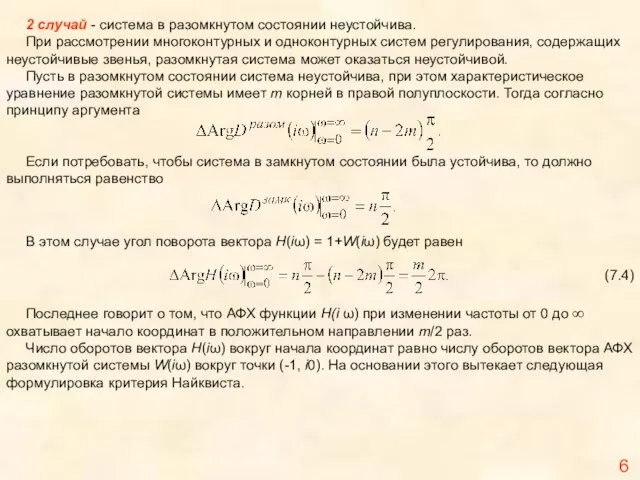
- 5. Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно выполняться равенство 6 2 случай
- 6. 7 Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая система автоматического управления была
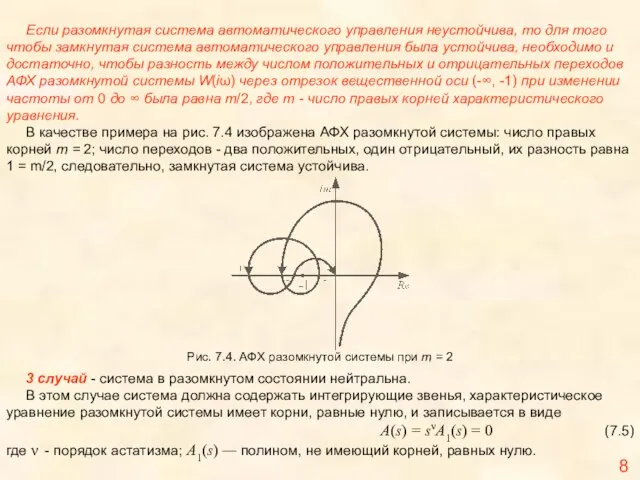
- 7. Если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая система автоматического управления была устойчива,
- 8. 9 При ω = 0, W(iω) = ∞ и АФХ претерпевает разрыв, поэтому решать вопрос об
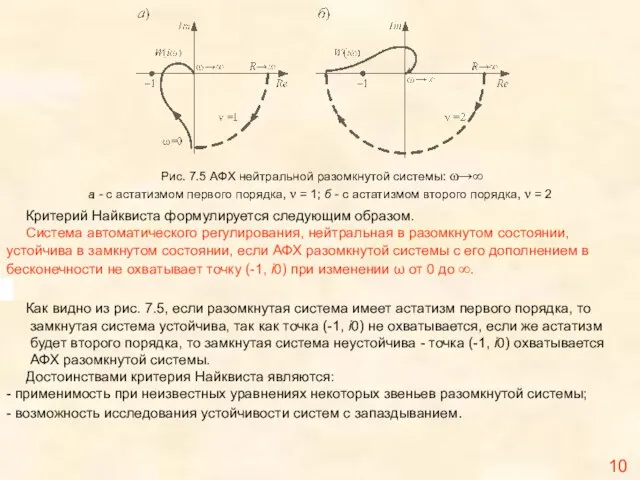
- 9. 10 Рис. 7.5 АФХ нейтральной разомкнутой системы: ω→∞ а - с астатизмом первого порядка, ν =
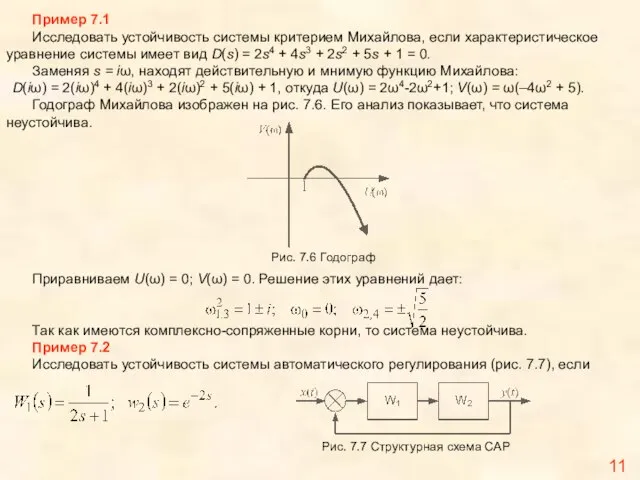
- 10. 11 Пример 7.1 Исследовать устойчивость системы критерием Михайлова, если характеристическое уравнение системы имеет вид D(s) =
- 12. Скачать презентацию
Слайд 2 Пусть передаточная функция разомкнутой системы имеет вид
Передаточная функция замкнутой САР по
Пусть передаточная функция разомкнутой системы имеет вид
Передаточная функция замкнутой САР по
Слайд 33
Рис. 7.1 АФХ разомкнутой системы
Вектор (1+W(iω)), следовательно, включает в себя свойства
3
Рис. 7.1 АФХ разомкнутой системы
Вектор (1+W(iω)), следовательно, включает в себя свойства
Слайд 45
Отсюда следует, что приращение аргумента вектора H(iω) = (1+W(iω)) равно нулю
(7.3)
Соотношение
5
Отсюда следует, что приращение аргумента вектора H(iω) = (1+W(iω)) равно нулю
(7.3)
Соотношение
Слайд 5 Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно
Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно
Слайд 67
Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая
7
Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая
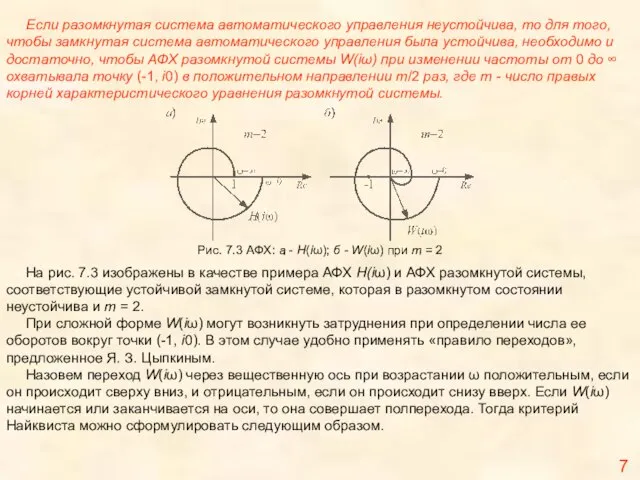
Слайд 7 Если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая
Если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая
Слайд 89
При ω = 0, W(iω) = ∞ и АФХ претерпевает разрыв,
9
При ω = 0, W(iω) = ∞ и АФХ претерпевает разрыв,
Слайд 910
Рис. 7.5 АФХ нейтральной разомкнутой системы: ω→∞
а - с астатизмом первого
10
Рис. 7.5 АФХ нейтральной разомкнутой системы: ω→∞
а - с астатизмом первого
Слайд 1011
Пример 7.1
Исследовать устойчивость системы критерием Михайлова, если характеристическое уравнение
11
Пример 7.1
Исследовать устойчивость системы критерием Михайлова, если характеристическое уравнение
 Batel. Сетевой маркетинг
Batel. Сетевой маркетинг bc9ec32a7c8b7bc7
bc9ec32a7c8b7bc7 Lichnostnoe_razvitie_shkolnika_na_urokakh_IZO
Lichnostnoe_razvitie_shkolnika_na_urokakh_IZO Кто организует и направляет международный терроризм
Кто организует и направляет международный терроризм Членство в ВТО: мнение российских компаний
Членство в ВТО: мнение российских компаний Хохлома
Хохлома октябрь, 2007
октябрь, 2007 ПУТИ ФОРМИРОВАНИЯ СОЦИАЛЬНОЙ КОМПЕТЕНТНОСТИ СТУДЕНТОВ «ГРУППЫ РИСКА» В УСЛОВИЯХ ПРОФЕССИОНАЛЬНО – ПЕДАГОГИЧЕСКОГО КОЛЛЕДЖА Ю.
ПУТИ ФОРМИРОВАНИЯ СОЦИАЛЬНОЙ КОМПЕТЕНТНОСТИ СТУДЕНТОВ «ГРУППЫ РИСКА» В УСЛОВИЯХ ПРОФЕССИОНАЛЬНО – ПЕДАГОГИЧЕСКОГО КОЛЛЕДЖА Ю. Навигационно-программный комплекс «СитиГИД-Диспетчер»
Навигационно-программный комплекс «СитиГИД-Диспетчер» Самопознание как структурный компонент самосознания человека (тема 2)
Самопознание как структурный компонент самосознания человека (тема 2) Music which stroke conservative Britain
Music which stroke conservative Britain Деятельность ПМПК в современных условиях. Ключевые ориентиры
Деятельность ПМПК в современных условиях. Ключевые ориентиры Презентация на тему Микроэволюция, вид, критерии и структура
Презентация на тему Микроэволюция, вид, критерии и структура Основания и подходы к организации деятельности в подростковой школе в рамках введения ФГОС ООО
Основания и подходы к организации деятельности в подростковой школе в рамках введения ФГОС ООО Рисуем акварелью и солью
Рисуем акварелью и солью Олимпийские символы и талисманы
Олимпийские символы и талисманы Страхование как эффективный инструмент защиты
Страхование как эффективный инструмент защиты Куда поступать учиться
Куда поступать учиться  Презентация (1) (2)
Презентация (1) (2) Изменение масштабов и форм борьбы с контрафактной продукцией на российском рынке потребительских товаров
Изменение масштабов и форм борьбы с контрафактной продукцией на российском рынке потребительских товаров Презентация на тему Появление славян
Презентация на тему Появление славян  Презентация на тему Политическое лидерство
Презентация на тему Политическое лидерство Эпоха Возрождения
Эпоха Возрождения Посвящение в первоклассники
Посвящение в первоклассники Сказка ложь, да в ней намек …
Сказка ложь, да в ней намек … Meat – мясо, мясные
Meat – мясо, мясные Образование XVI-XVII
Образование XVI-XVII