- Основы автоматического управления

Содержание
- 2. 2 Исследование качества процессов регулирования Одной из проблем, возникающих при построении систем автоматического регулирования, наряду с
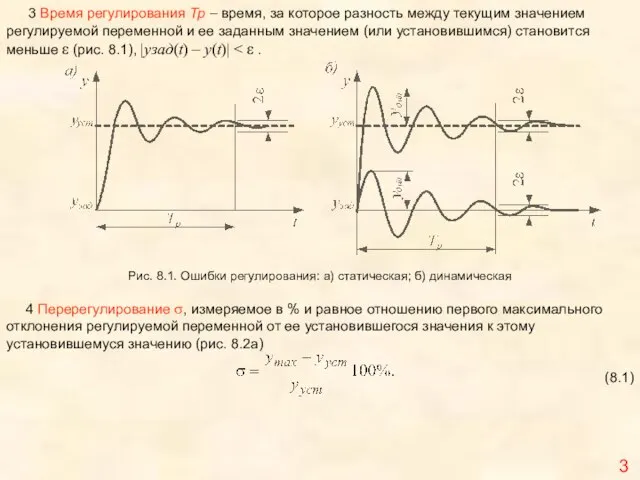
- 3. 3 Рис. 8.1. Ошибки регулирования: а) статическая; б) динамическая 4 Перерегулирование σ, измеряемое в % и
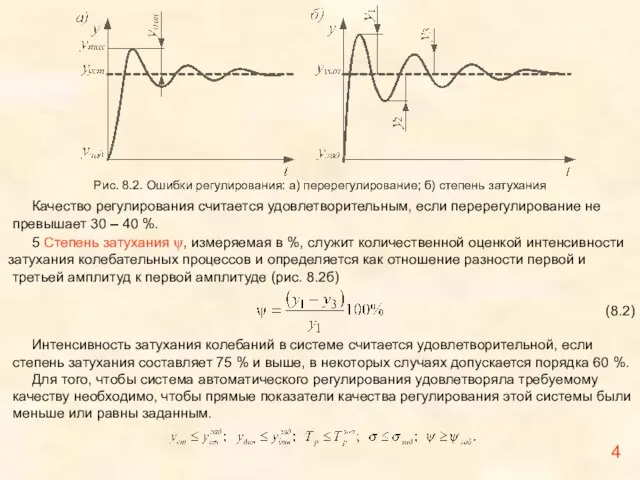
- 4. Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30 – 40 %. 5 Степень затухания ψ,
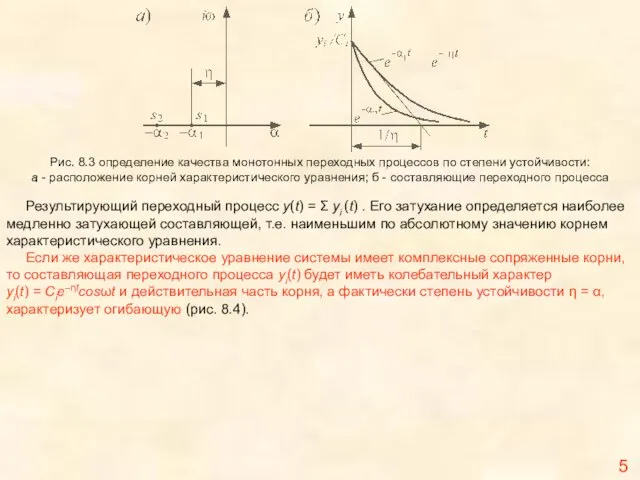
- 5. Иногда требования по качеству регулирования могут быть более жесткие, например, переходный процесс должен быть монотонным или
- 6. Рис. 8.3 определение качества монотонных переходных процессов по степени устойчивости: а - расположение корней характеристического уравнения;
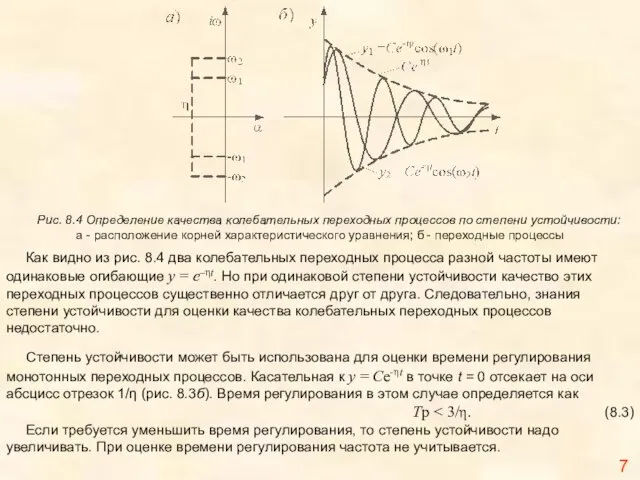
- 7. Рис. 8.4 Определение качества колебательных переходных процессов по степени устойчивости: а - расположение корней характеристического уравнения;
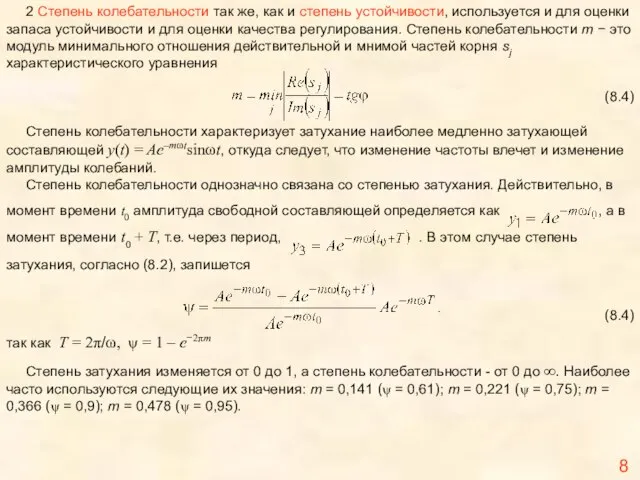
- 8. 2 Степень колебательности так же, как и степень устойчивости, используется и для оценки запаса устойчивости и
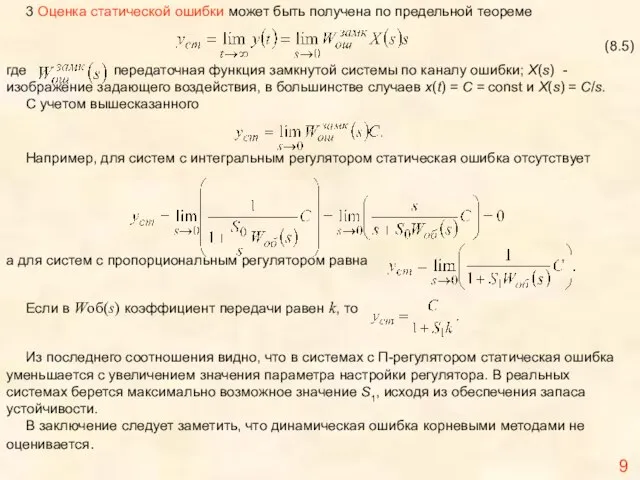
- 9. Из последнего соотношения видно, что в системах с П-регулятором статическая ошибка уменьшается с увеличением значения параметра
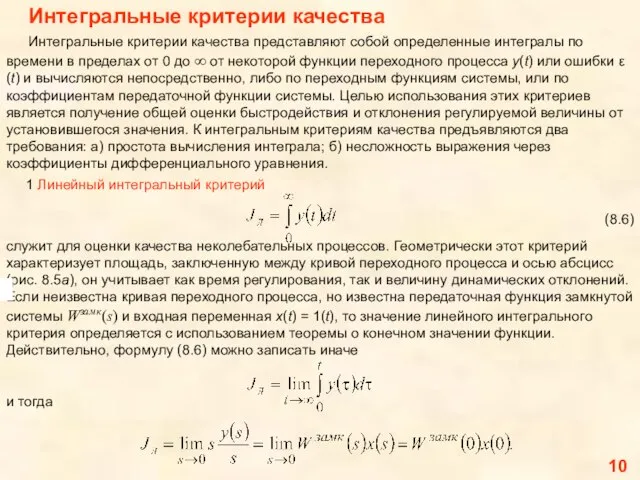
- 10. 10 Интегральные критерии качества Интегральные критерии качества представляют собой определенные интегралы по времени в пределах от
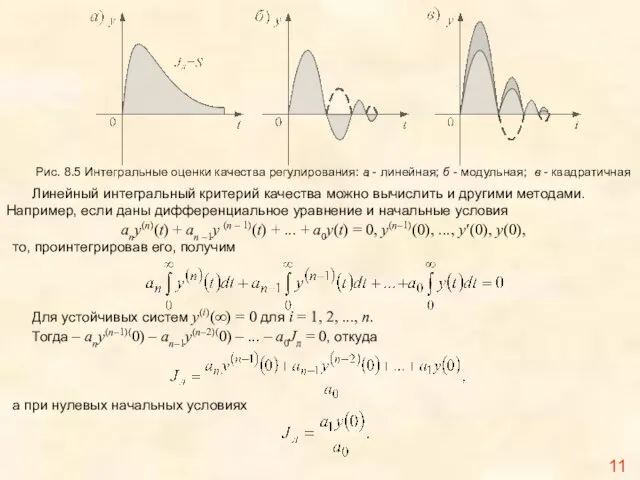
- 11. Рис. 8.5 Интегральные оценки качества регулирования: а - линейная; б - модульная; в - квадратичная Линейный
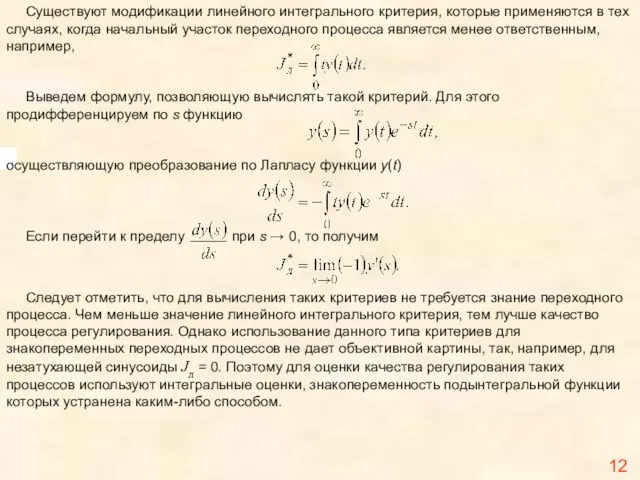
- 12. 12 Если перейти к пределу при s → 0, то получим Следует отметить, что для вычисления
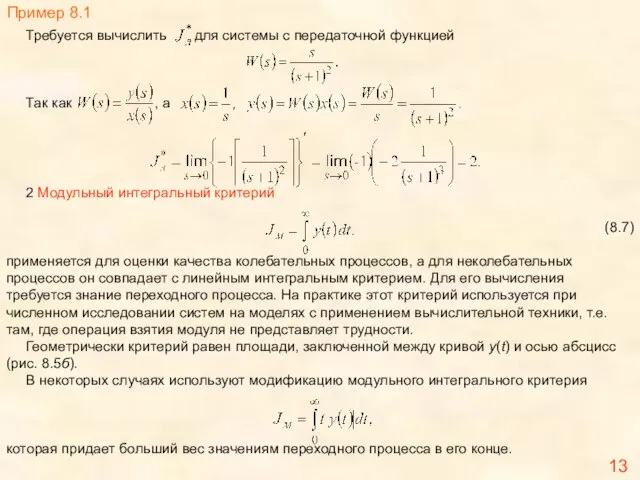
- 13. 13 Пример 8.1 Требуется вычислить для системы с передаточной функцией Так как , а 2 Модульный
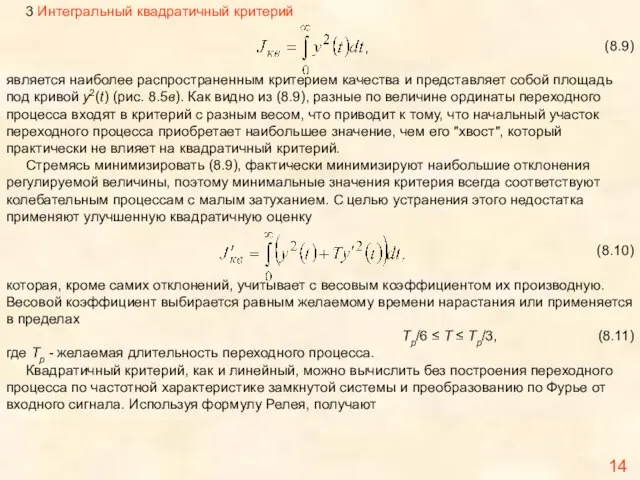
- 14. 14 3 Интегральный квадратичный критерий (8.9) является наиболее распространенным критерием качества и представляет собой площадь под
- 16. Скачать презентацию
Слайд 22
Исследование качества процессов регулирования
Одной из проблем, возникающих при построении систем автоматического
2
Исследование качества процессов регулирования
Одной из проблем, возникающих при построении систем автоматического
Слайд 33
Рис. 8.1. Ошибки регулирования: а) статическая; б) динамическая
4 Перерегулирование σ, измеряемое
3
Рис. 8.1. Ошибки регулирования: а) статическая; б) динамическая
4 Перерегулирование σ, измеряемое
Слайд 4 Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30 – 40
Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30 – 40
Слайд 5 Иногда требования по качеству регулирования могут быть более жесткие, например, переходный
Иногда требования по качеству регулирования могут быть более жесткие, например, переходный
Слайд 6Рис. 8.3 определение качества монотонных переходных процессов по степени устойчивости:
а - расположение
Рис. 8.3 определение качества монотонных переходных процессов по степени устойчивости:
а - расположение
Слайд 7 Рис. 8.4 Определение качества колебательных переходных процессов по степени устойчивости:
а -
Рис. 8.4 Определение качества колебательных переходных процессов по степени устойчивости:
а -
Слайд 8 2 Степень колебательности так же, как и степень устойчивости, используется и
2 Степень колебательности так же, как и степень устойчивости, используется и
Слайд 9 Из последнего соотношения видно, что в системах с П-регулятором статическая ошибка
уменьшается
Из последнего соотношения видно, что в системах с П-регулятором статическая ошибка
уменьшается
Слайд 1010
Интегральные критерии качества
Интегральные критерии качества представляют собой определенные интегралы по
10
Интегральные критерии качества
Интегральные критерии качества представляют собой определенные интегралы по
Слайд 11 Рис. 8.5 Интегральные оценки качества регулирования: а - линейная; б -
Рис. 8.5 Интегральные оценки качества регулирования: а - линейная; б -
Слайд 1212
Если перейти к пределу при s → 0, то получим
Следует
12
Если перейти к пределу при s → 0, то получим
Следует
Слайд 1313
Пример 8.1
Требуется вычислить для системы с передаточной функцией
Так как , а
13
Пример 8.1
Требуется вычислить для системы с передаточной функцией
Так как , а
Слайд 1414
3 Интегральный квадратичный критерий
(8.9)
является наиболее распространенным критерием качества и представляет собой
14
3 Интегральный квадратичный критерий
(8.9)
является наиболее распространенным критерием качества и представляет собой
 Восточные танцы
Восточные танцы О клубе «ЛИДЕР» Евразийского национального университета им. Л.Н. Гумилева Основной целью клуба является: Развитие и совершенствов
О клубе «ЛИДЕР» Евразийского национального университета им. Л.Н. Гумилева Основной целью клуба является: Развитие и совершенствов Душевая перегородка 135 гр
Душевая перегородка 135 гр Всероссийский правовой диктант
Всероссийский правовой диктант Курс лекций по теоретической механике
Курс лекций по теоретической механике Степень с целым показателем
Степень с целым показателем Викторина Колосок
Викторина Колосок Навык быть гибким
Навык быть гибким Султанат Оман. Особенности конституционной истории и общественного строя Омана
Султанат Оман. Особенности конституционной истории и общественного строя Омана Миссия среди молодежи в условиях пандемии: духовные уроки и их осмысление
Миссия среди молодежи в условиях пандемии: духовные уроки и их осмысление Робототехника. Лифт
Робототехника. Лифт ЭЛЕКТРОННАЯ ЧЕХОВИАНА
ЭЛЕКТРОННАЯ ЧЕХОВИАНА Зачем нужны знаки препинания
Зачем нужны знаки препинания Шестнадцатое мартаКлассная работа
Шестнадцатое мартаКлассная работа Презентация на тему Световая фаза фотосинтеза (9 класс)
Презентация на тему Световая фаза фотосинтеза (9 класс) История Конституции Российской Федерации. Содержание Проекты Конституции декабристов Демократическая Конституция России Значен
История Конституции Российской Федерации. Содержание Проекты Конституции декабристов Демократическая Конституция России Значен Что такое созависимость
Что такое созависимость Качество образования через метаметодику
Качество образования через метаметодику Тема исследования:«Её Величество – пунктуация»
Тема исследования:«Её Величество – пунктуация» Организация архитектурно-ландшафтного пространства
Организация архитектурно-ландшафтного пространства Настройка харвестерной головки Н7
Настройка харвестерной головки Н7 Жевательная резинка
Жевательная резинка  Борис Николаевич Ельцин
Борис Николаевич Ельцин Реализация ФГОС. Стандарты второго поколения
Реализация ФГОС. Стандарты второго поколения Презентация на тему Экзамен без стресса
Презентация на тему Экзамен без стресса Implementarea listelor simplu inlantuite
Implementarea listelor simplu inlantuite Использование информационных технологий в школьном курсе предмета «черчение»
Использование информационных технологий в школьном курсе предмета «черчение» Результаты диагностики познавательной сферы в 6 классе
Результаты диагностики познавательной сферы в 6 классе