- Принципы возможных перемещений, обобщенные координатные системы

Содержание
- 2. 1. Связи и их уравнения. Связями принято называть ограничения, налагаемые на положения и скорости точек механической
- 3. Предположим, точка перемещается по сфере, радиус которой изменяется во времени: R =f (t).Если центр сферы совпадает
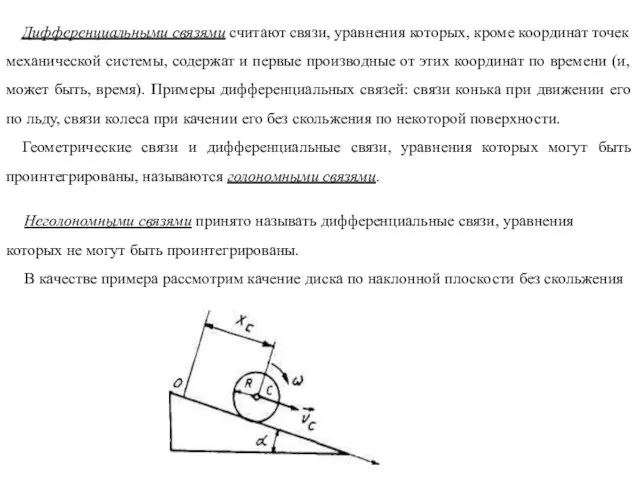
- 4. Дифференциальными связями считают связи, уравнения которых, кроме координат точек механической системы, содержат и первые производные от
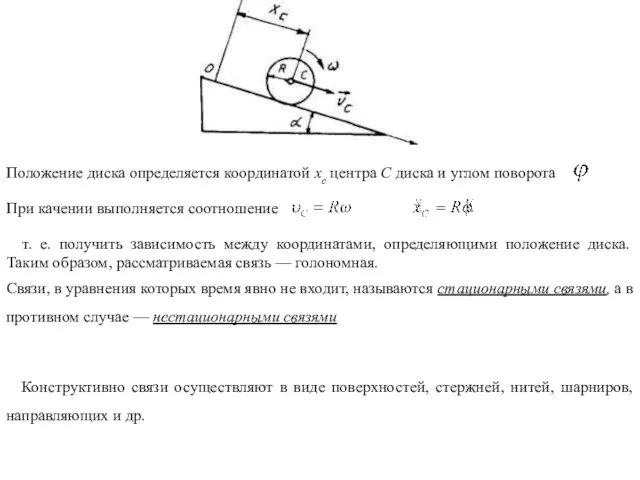
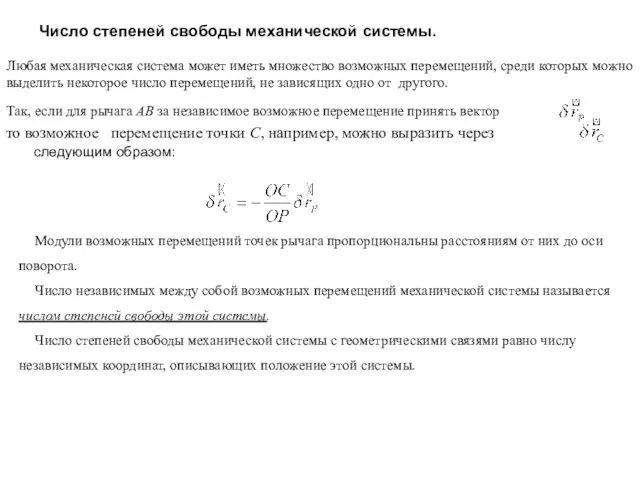
- 5. Положение диска определяется координатой хс центра С диска и углом поворота При качении выполняется соотношение или
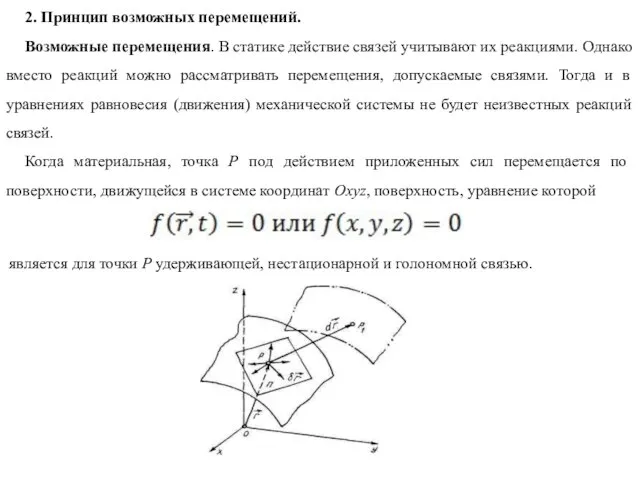
- 6. 2. Принцип возможных перемещений. Возможные перемещения. В статике действие связей учитывают их реакциями. Однако вместо реакций
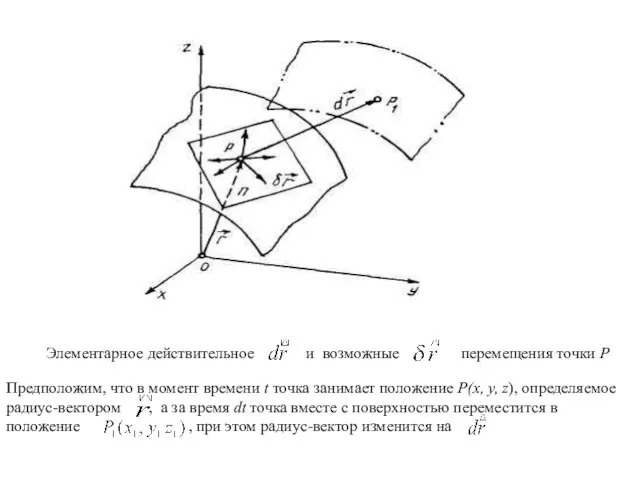
- 7. Элементарное действительное и возможные перемещения точки Р Предположим, что в момент времени t точка занимает положение
- 8. Перемещение точки из одного положения в другое, бесконечно близкое к первому, выражаемое дифференциалом радиус-вектора точки, представляет
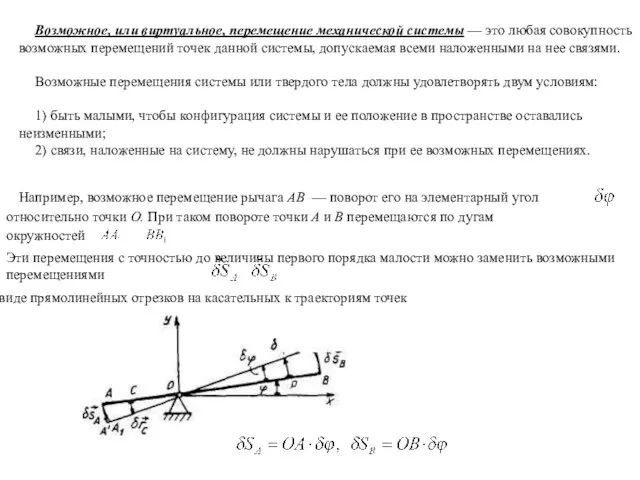
- 9. Возможное, или виртуальное, перемещение механической системы — это любая совокупность возможных перемещений точек данной системы, допускаемая
- 10. Любая механическая система может иметь множество возможных перемещений, среди которых можно выделить некоторое число перемещений, не
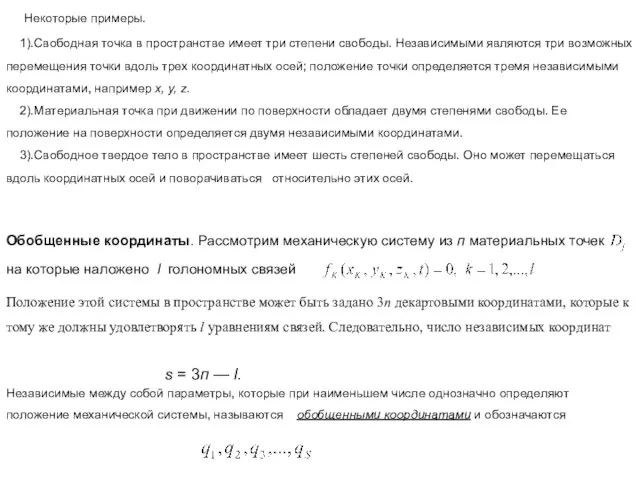
- 11. Некоторые примеры. 1).Свободная точка в пространстве имеет три степени свободы. Независимыми являются три возможных перемещения точки
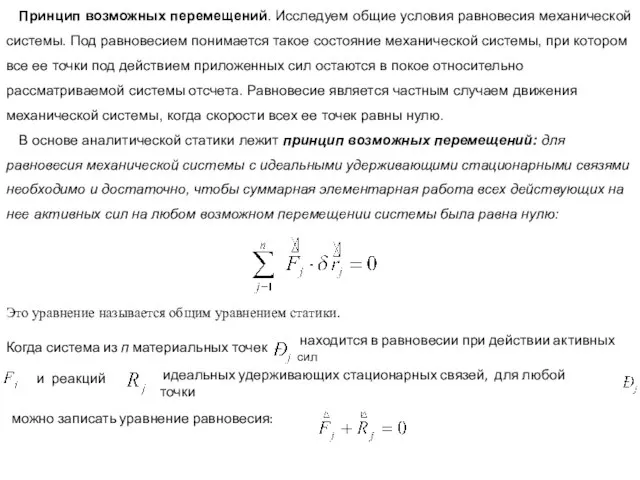
- 12. Принцип возможных перемещений. Исследуем общие условия равновесия механической системы. Под равновесием понимается такое состояние механической системы,
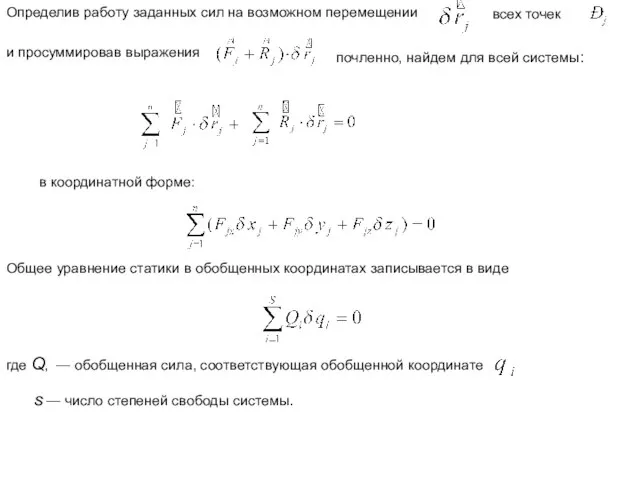
- 13. Определив работу заданных сил на возможном перемещении всех точек и просуммировав выражения почленно, найдем для всей
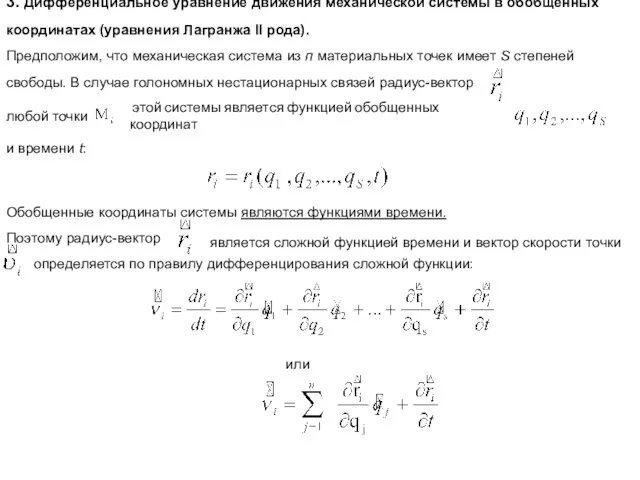
- 14. 3. Дифференциальное уравнение движения механической системы в обобщенных координатах (уравнения Лагранжа II рода). Предположим, что механическая
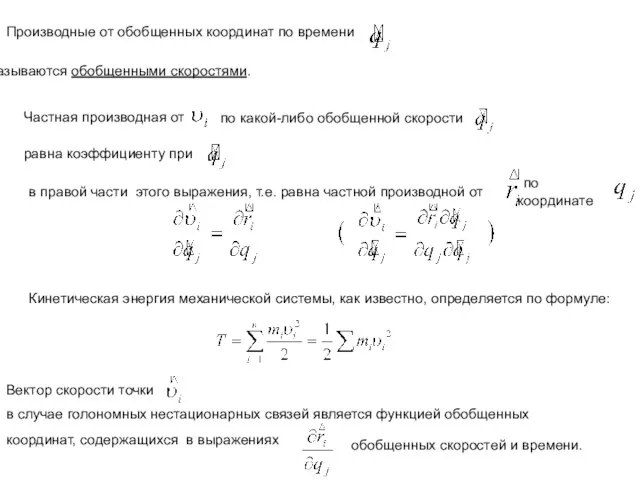
- 15. Производные от обобщенных координат по времени называются обобщенными скоростями. Частная производная от по какой-либо обобщенной скорости
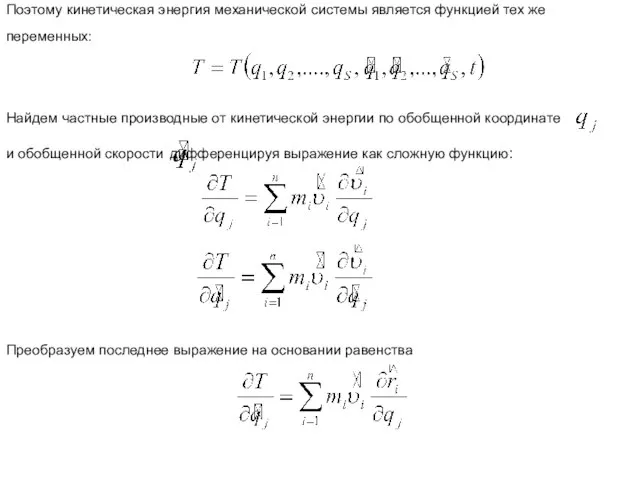
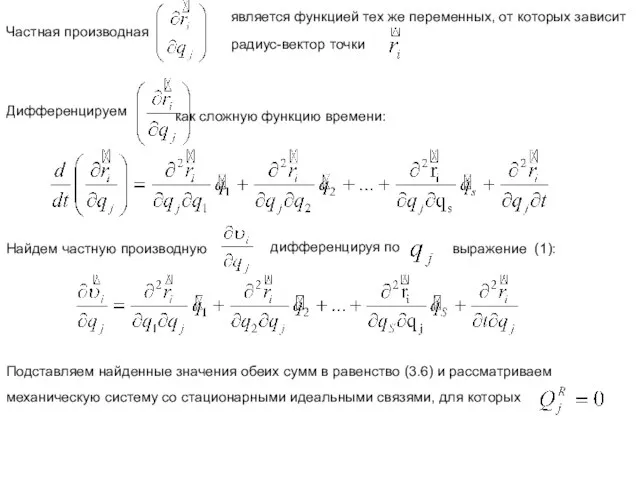
- 16. Поэтому кинетическая энергия механической системы является функцией тех же переменных: Найдем частные производные от кинетической энергии
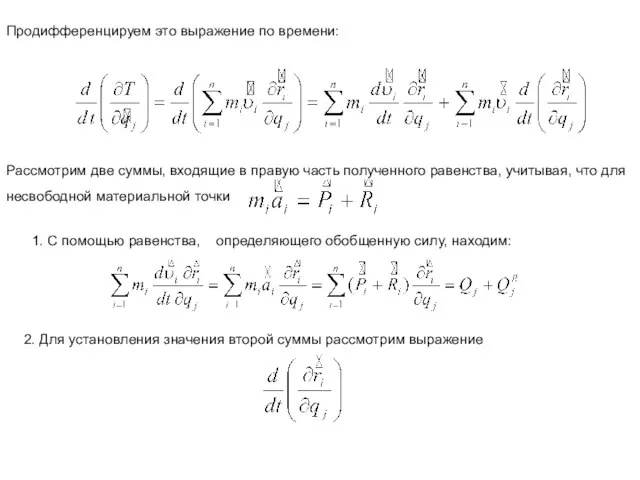
- 17. Продифференцируем это выражение по времени: Рассмотрим две суммы, входящие в правую часть полученного равенства, учитывая, что
- 18. Частная производная является функцией тех же переменных, от которых зависит радиус-вектор точки Дифференцируем как сложную функцию
- 20. Скачать презентацию
Слайд 3Предположим, точка перемещается по сфере, радиус которой изменяется во времени:
R =f
Предположим, точка перемещается по сфере, радиус которой изменяется во времени:
R =f
Слайд 4Дифференциальными связями считают связи, уравнения которых, кроме координат точек механической системы, содержат
Слайд 5Положение диска определяется координатой хс центра С диска и углом поворота
При
Положение диска определяется координатой хс центра С диска и углом поворота
При
Слайд 62. Принцип возможных перемещений.
Возможные перемещения. В статике действие связей учитывают их реакциями.
2. Принцип возможных перемещений.
Возможные перемещения. В статике действие связей учитывают их реакциями.
Слайд 7Элементарное действительное
и возможные
перемещения точки Р
Предположим, что в момент времени t
Элементарное действительное
и возможные
перемещения точки Р
Предположим, что в момент времени t
Слайд 8Перемещение точки из одного положения в другое, бесконечно близкое к первому, выражаемое
Перемещение точки из одного положения в другое, бесконечно близкое к первому, выражаемое
Слайд 9Возможное, или виртуальное, перемещение механической системы — это любая совокупность возможных перемещений
Возможное, или виртуальное, перемещение механической системы — это любая совокупность возможных перемещений
Слайд 10Любая механическая система может иметь множество возможных перемещений, среди которых можно выделить
Любая механическая система может иметь множество возможных перемещений, среди которых можно выделить
Слайд 11 Некоторые примеры.
1).Свободная точка в пространстве имеет три степени свободы. Независимыми являются
Некоторые примеры.
1).Свободная точка в пространстве имеет три степени свободы. Независимыми являются
Слайд 12Принцип возможных перемещений. Исследуем общие условия равновесия механической системы. Под равновесием понимается
Принцип возможных перемещений. Исследуем общие условия равновесия механической системы. Под равновесием понимается
Слайд 13Определив работу заданных сил на возможном перемещении
всех точек
и просуммировав выражения
Определив работу заданных сил на возможном перемещении
всех точек
и просуммировав выражения
Слайд 143. Дифференциальное уравнение движения механической системы в обобщенных координатах (уравнения Лагранжа II
3. Дифференциальное уравнение движения механической системы в обобщенных координатах (уравнения Лагранжа II
Слайд 15Производные от обобщенных координат по времени
называются обобщенными скоростями.
Частная производная от
по
Производные от обобщенных координат по времени
называются обобщенными скоростями.
Частная производная от
по
Слайд 16Поэтому кинетическая энергия механической системы является функцией тех же переменных:
Найдем частные производные
Поэтому кинетическая энергия механической системы является функцией тех же переменных:
Найдем частные производные
Слайд 17Продифференцируем это выражение по времени:
Рассмотрим две суммы, входящие в правую часть полученного
Продифференцируем это выражение по времени:
Рассмотрим две суммы, входящие в правую часть полученного
Слайд 18Частная производная
является функцией тех же переменных, от которых зависит
радиус-вектор точки
Частная производная
является функцией тех же переменных, от которых зависит
радиус-вектор точки
 Музей-усадьба Михайловское
Музей-усадьба Михайловское «Развитие транспортной инфраструктуры флота река-море РФ. (2012-2015 гг.)»
«Развитие транспортной инфраструктуры флота река-море РФ. (2012-2015 гг.)» Ассортимент и классификация дополнительных видов сырья животного происхождения. Тема 1
Ассортимент и классификация дополнительных видов сырья животного происхождения. Тема 1 Соединённые Штаты Америки
Соединённые Штаты Америки Цветовая гамма
Цветовая гамма Сударыня-Масленица
Сударыня-Масленица Визитная карточка региональной обучающей команды Республики Карелия
Визитная карточка региональной обучающей команды Республики Карелия Золотое сечение в геометрии
Золотое сечение в геометрии Декор стеклянных бутылок
Декор стеклянных бутылок Управленческо-правовые механизмы в сфере государственного и муниципального управления. Лекция 1.1
Управленческо-правовые механизмы в сфере государственного и муниципального управления. Лекция 1.1 1
1 Действия с рациональными числами (6 класс)
Действия с рациональными числами (6 класс) Понятийный диктант
Понятийный диктант Тестирование документации и требований
Тестирование документации и требований Учёт психофизиологических индивидуальных особенностей школьника в организации учебно-воспитательного процесса
Учёт психофизиологических индивидуальных особенностей школьника в организации учебно-воспитательного процесса Теория Вечной Вселенной
Теория Вечной Вселенной Инновационные технологии во внеклассной работе по математике
Инновационные технологии во внеклассной работе по математике "12 сервисов для эффективной работы в Social Media" Дмитрий Ткаченко, управляющий партнер SMMGroup
"12 сервисов для эффективной работы в Social Media" Дмитрий Ткаченко, управляющий партнер SMMGroup Презентация на тему Вклад М.В. Ломоносова в возрождение русского мозаичного искусства
Презентация на тему Вклад М.В. Ломоносова в возрождение русского мозаичного искусства  Путь сталкера
Путь сталкера Лучшие практики организации досуга несовершеннолетних в летний период 2020 года
Лучшие практики организации досуга несовершеннолетних в летний период 2020 года Матвинур – моя малая родина
Матвинур – моя малая родина Scene
Scene Сценарии развития мировой энергетики в 2010-2050 гг.
Сценарии развития мировой энергетики в 2010-2050 гг. Личность. Общие представления о личности
Личность. Общие представления о личности Своя игра. Спорт
Своя игра. Спорт ПИТАНИЕ и МЫСЛИ ПРОТИВ СТАРЕНИЯ
ПИТАНИЕ и МЫСЛИ ПРОТИВ СТАРЕНИЯ  Угрозы России в XXI веке
Угрозы России в XXI веке