- Разработка роботизированного комплекса обследования конструкций нефтяных вышек

Содержание
- 2. Визуальная фиксация дефектов с помощью камер без применения технологии трёхмерного моделирования Трудозатратность проведения повторного анализа Сложность
- 3. КОМПЛЕКС «SCANFRAME» ПОЗВОЛЯЕТ: 1. Уменьшить временные затраты на обследование конструкций за счёт обработки данных с помощью
- 4. Робот-дрон Дефекты Камера высокого разрешения СХЕМА СЕНСОРНОГО ИССЛЕДОВАНИЯ Мониторинг и обнаружение дефектов, находящихся в зоне действия
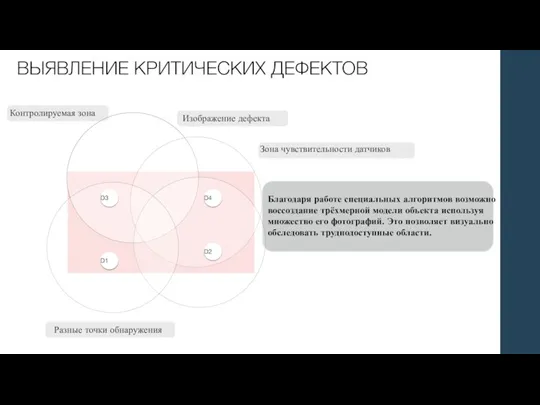
- 5. ВЫЯВЛЕНИЕ КРИТИЧЕСКИХ ДЕФЕКТОВ Благодаря работе специальных алгоритмов возможно воссоздание трёхмерной модели объекта используя множество его фотографий.
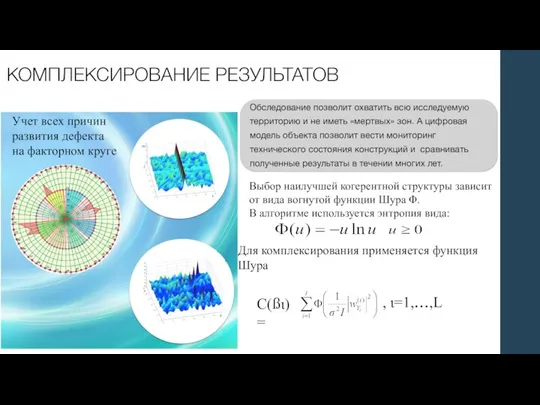
- 6. КОМПЛЕКСИРОВАНИЕ РЕЗУЛЬТАТОВ Обследование позволит охватить всю исследуемую территорию и не иметь «мертвых» зон. А цифровая модель
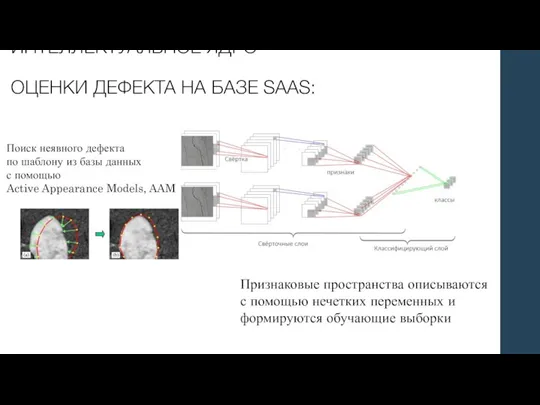
- 7. ИНТЕЛЛЕКТУАЛЬНОЕ ЯДРО ОЦЕНКИ ДЕФЕКТА НА БАЗЕ SAAS: Признаковые пространства описываются с помощью нечетких переменных и формируются
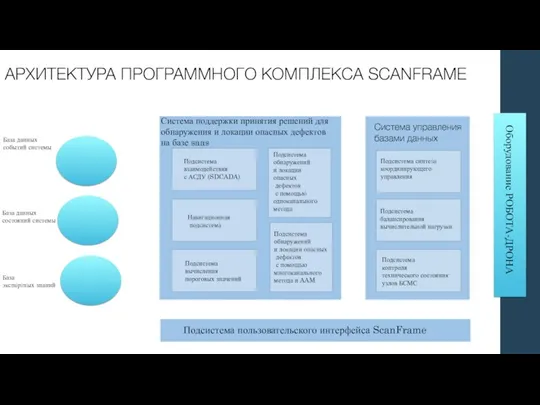
- 8. АРХИТЕКТУРА ПРОГРАММНОГО КОМПЛЕКСА SCANFRAME Подсистема пользовательского интерфейса ScanFrame Система поддержки принятия решений для обнаружения и локации
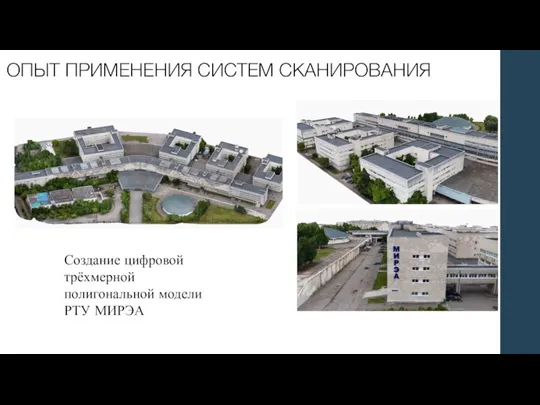
- 9. ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ Создание цифровой трёхмерной полигональной модели РТУ МИРЭА
- 10. ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ Обнаружение дефектов водонапорной башни с помощью цифровой трёхмерной модели
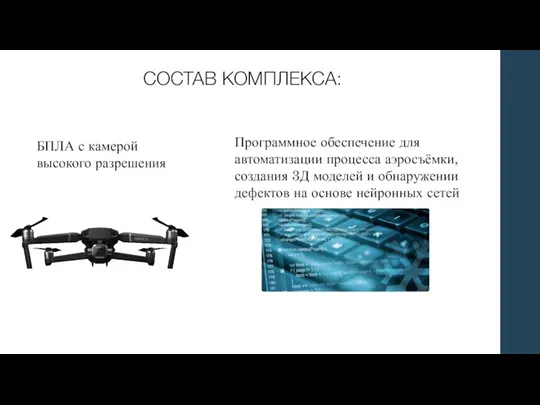
- 11. СОСТАВ КОМПЛЕКСА: БПЛА с камерой высокого разрешения Программное обеспечение для автоматизации процесса аэросъёмки, создания 3Д моделей
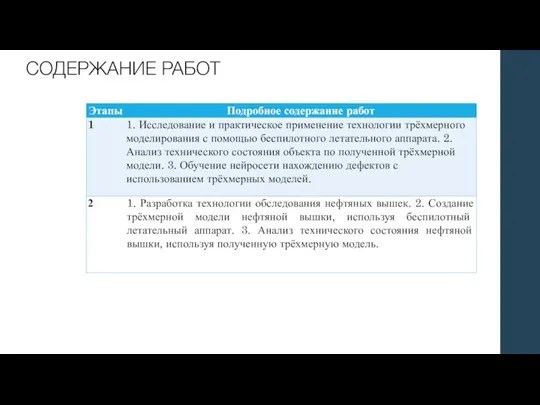
- 12. СОДЕРЖАНИЕ РАБОТ
- 13. Конкуренты: В конце 2020 года у компании Pix4D появился комплекс по автоматизации обследования вышек сотовой связи
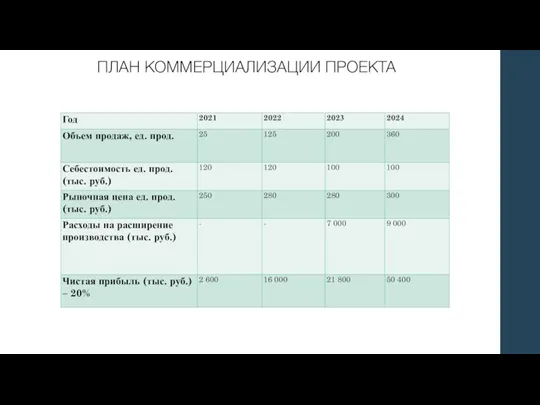
- 14. ПЛАН КОММЕРЦИАЛИЗАЦИИ ПРОЕКТА
- 16. Скачать презентацию
Слайд 2Визуальная фиксация дефектов с помощью камер без применения технологии трёхмерного моделирования
Трудозатратность проведения
Визуальная фиксация дефектов с помощью камер без применения технологии трёхмерного моделирования
Трудозатратность проведения
Слайд 3КОМПЛЕКС «SCANFRAME» ПОЗВОЛЯЕТ:
1. Уменьшить временные затраты на обследование конструкций за счёт обработки
КОМПЛЕКС «SCANFRAME» ПОЗВОЛЯЕТ:
1. Уменьшить временные затраты на обследование конструкций за счёт обработки
Слайд 4Робот-дрон
Дефекты
Камера высокого разрешения
СХЕМА СЕНСОРНОГО ИССЛЕДОВАНИЯ
Мониторинг и обнаружение дефектов, находящихся в зоне действия
Робот-дрон
Дефекты
Камера высокого разрешения
СХЕМА СЕНСОРНОГО ИССЛЕДОВАНИЯ
Мониторинг и обнаружение дефектов, находящихся в зоне действия

Слайд 5ВЫЯВЛЕНИЕ КРИТИЧЕСКИХ ДЕФЕКТОВ
Благодаря работе специальных алгоритмов возможно воссоздание трёхмерной модели объекта
ВЫЯВЛЕНИЕ КРИТИЧЕСКИХ ДЕФЕКТОВ
Благодаря работе специальных алгоритмов возможно воссоздание трёхмерной модели объекта
Слайд 6КОМПЛЕКСИРОВАНИЕ РЕЗУЛЬТАТОВ
Обследование позволит охватить всю исследуемую территорию и не иметь «мертвых» зон.
КОМПЛЕКСИРОВАНИЕ РЕЗУЛЬТАТОВ
Обследование позволит охватить всю исследуемую территорию и не иметь «мертвых» зон.
Слайд 7ИНТЕЛЛЕКТУАЛЬНОЕ ЯДРО
ОЦЕНКИ ДЕФЕКТА НА БАЗЕ SAAS:
Признаковые пространства описываются с помощью нечетких
ИНТЕЛЛЕКТУАЛЬНОЕ ЯДРО
ОЦЕНКИ ДЕФЕКТА НА БАЗЕ SAAS:
Признаковые пространства описываются с помощью нечетких
Слайд 8АРХИТЕКТУРА ПРОГРАММНОГО КОМПЛЕКСА SCANFRAME
Подсистема пользовательского интерфейса ScanFrame
Система поддержки принятия решений для обнаружения
АРХИТЕКТУРА ПРОГРАММНОГО КОМПЛЕКСА SCANFRAME
Подсистема пользовательского интерфейса ScanFrame
Система поддержки принятия решений для обнаружения
Слайд 9ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ
Создание цифровой трёхмерной полигональной модели РТУ МИРЭА
ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ
Создание цифровой трёхмерной полигональной модели РТУ МИРЭА
Слайд 10ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ
Обнаружение дефектов водонапорной башни с помощью цифровой трёхмерной модели
ОПЫТ ПРИМЕНЕНИЯ СИСТЕМ СКАНИРОВАНИЯ
Обнаружение дефектов водонапорной башни с помощью цифровой трёхмерной модели

Слайд 11СОСТАВ КОМПЛЕКСА:
БПЛА с камерой высокого разрешения
Программное обеспечение для автоматизации процесса аэросъёмки, создания
СОСТАВ КОМПЛЕКСА:
БПЛА с камерой высокого разрешения
Программное обеспечение для автоматизации процесса аэросъёмки, создания
Слайд 12СОДЕРЖАНИЕ РАБОТ
СОДЕРЖАНИЕ РАБОТ
Слайд 13Конкуренты:
В конце 2020 года у компании Pix4D появился комплекс по автоматизации обследования
Конкуренты:
В конце 2020 года у компании Pix4D появился комплекс по автоматизации обследования
Слайд 14ПЛАН КОММЕРЦИАЛИЗАЦИИ ПРОЕКТА
ПЛАН КОММЕРЦИАЛИЗАЦИИ ПРОЕКТА
 Устройство персонального компьютера
Устройство персонального компьютера Козинак по-грузински
Козинак по-грузински Примеры. Сумма средств предприятия, для выплаты зарплаты
Примеры. Сумма средств предприятия, для выплаты зарплаты Презентация на тему Многоуровневые списки
Презентация на тему Многоуровневые списки  Движение крови и лимфы в организме. Органы кровообращения
Движение крови и лимфы в организме. Органы кровообращения Пирсинг , как одно из направлений молодёжной моды
Пирсинг , как одно из направлений молодёжной моды Способы определения качества товара
Способы определения качества товара The best job
The best job Презентация на тему: Вставь пропущенные буквы
Презентация на тему: Вставь пропущенные буквы Ульяновская Областная библиотека для детей и юношества имени С.Т. Аксакова
Ульяновская Областная библиотека для детей и юношества имени С.Т. Аксакова Витамины Opti Women
Витамины Opti Women Семинар 4.Построение теорий с использованием аксиоматического и гипотетико-дедуктивного методов и их применение в науке
Семинар 4.Построение теорий с использованием аксиоматического и гипотетико-дедуктивного методов и их применение в науке Государство. Проверочная работа
Государство. Проверочная работа НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ Презентация на тему Клеточный уровень жизни
Презентация на тему Клеточный уровень жизни Экспрессионизм
Экспрессионизм Профилактикa и защита детей от насилия в школе
Профилактикa и защита детей от насилия в школе Сказуемое: простое глагольное сказуемое
Сказуемое: простое глагольное сказуемое Органы по правовому обеспечению и оказанию правовой помощи
Органы по правовому обеспечению и оказанию правовой помощи  Правила сложения и умножения вероятностей
Правила сложения и умножения вероятностей Обучение c Академией АйТи
Обучение c Академией АйТи Взаимоотношения потребителей и компаний-застройщиков: обратная связь
Взаимоотношения потребителей и компаний-застройщиков: обратная связь 20140315_n.i._gulinatekhnologiya_produktivnogo_chteniya_na_uroke_geografii_v_8_klasse
20140315_n.i._gulinatekhnologiya_produktivnogo_chteniya_na_uroke_geografii_v_8_klasse Новый год в разных странах
Новый год в разных странах Разработка системы автономного позиционирования беспилотного летательного аппарата (БПЛА)
Разработка системы автономного позиционирования беспилотного летательного аппарата (БПЛА) Виды и жанры искусства
Виды и жанры искусства Демократия
Демократия Babayan Anahit
Babayan Anahit