- Регуляторы позиционного, непрерывного и импульсного действия

Содержание
- 2. ПОВТОРЕНИЕ: Объект управления Датчик Вторичный прибор Задающий элемент (задатчик) Сравнительный элемент (сумматор) Устройство управления Регулятор Исполнительный
- 3. СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 4. РЕГУЛЯТОР Автоматический регулятор – это автоматическое управляющее устройство, которое вырабатывает регулирующее воздействие в САР, если регулируемая
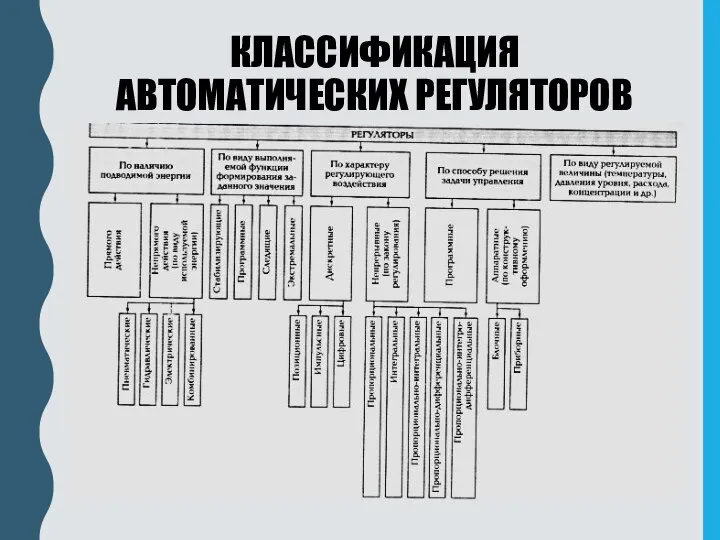
- 5. КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
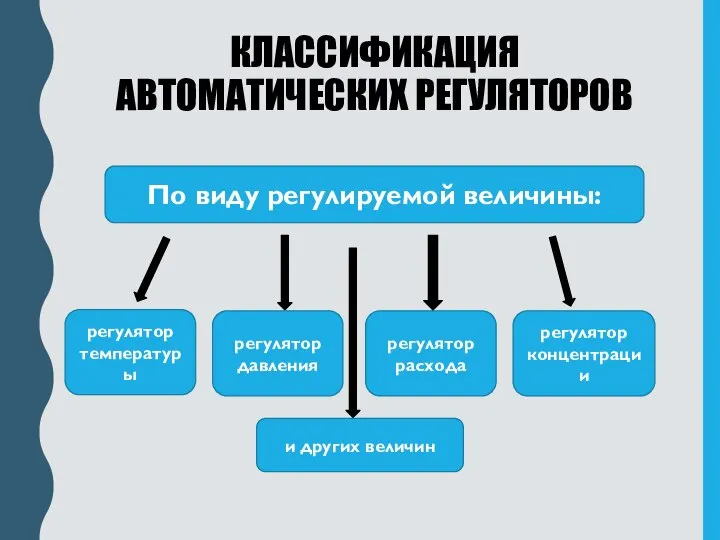
- 6. КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ По виду регулируемой величины: регулятор температуры регулятор давления регулятор расхода регулятор концентрации и
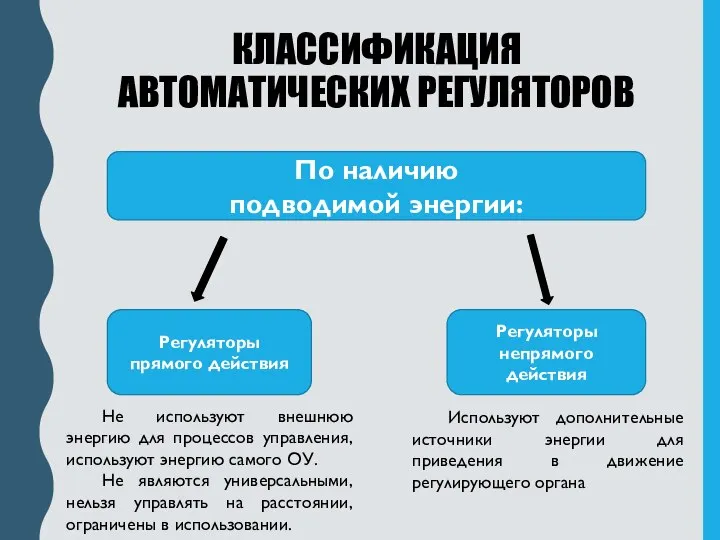
- 7. По наличию подводимой энергии: Регуляторы прямого действия Регуляторы непрямого действия Не используют внешнюю энергию для процессов
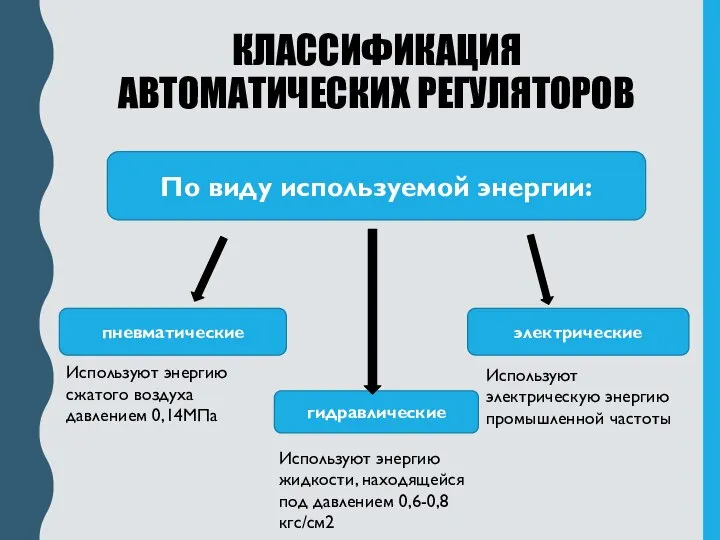
- 8. По виду используемой энергии: пневматические электрические гидравлические КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ Используют энергию сжатого воздуха давлением 0,14МПа
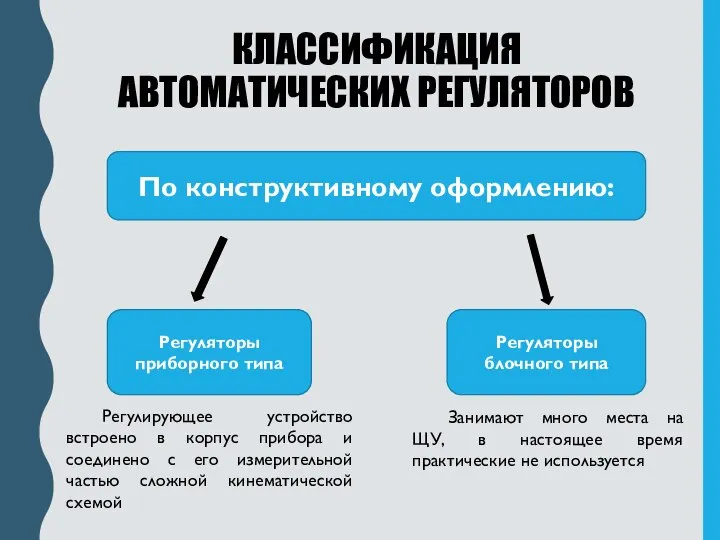
- 9. По конструктивному оформлению: Регуляторы приборного типа Регуляторы блочного типа Регулирующее устройство встроено в корпус прибора и
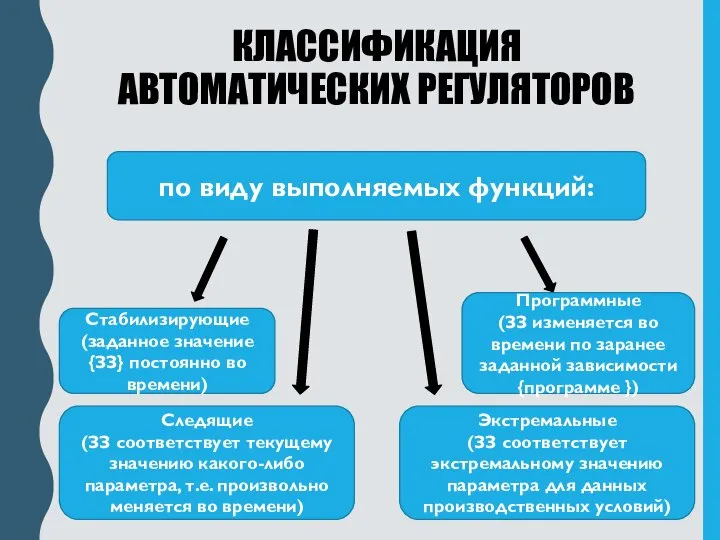
- 10. по виду выполняемых функций: Стабилизирующие (заданное значение {ЗЗ} постоянно во времени) Программные (ЗЗ изменяется во времени
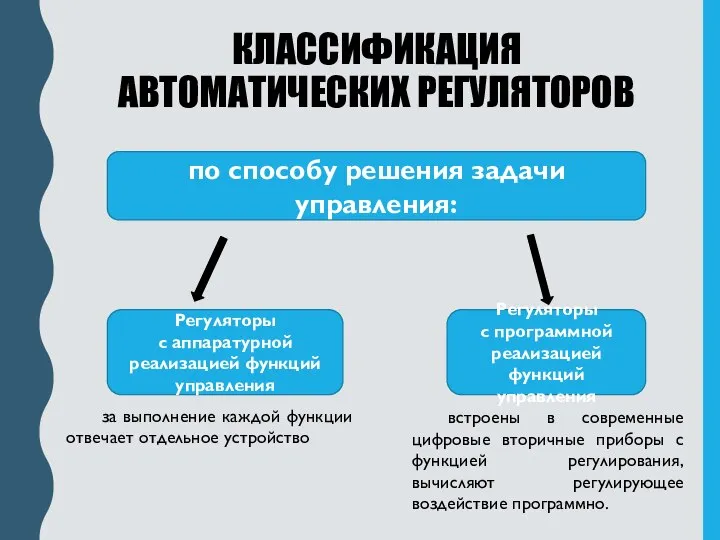
- 11. по способу решения задачи управления: Регуляторы с аппаратурной реализацией функций управления Регуляторы с программной реализацией функций
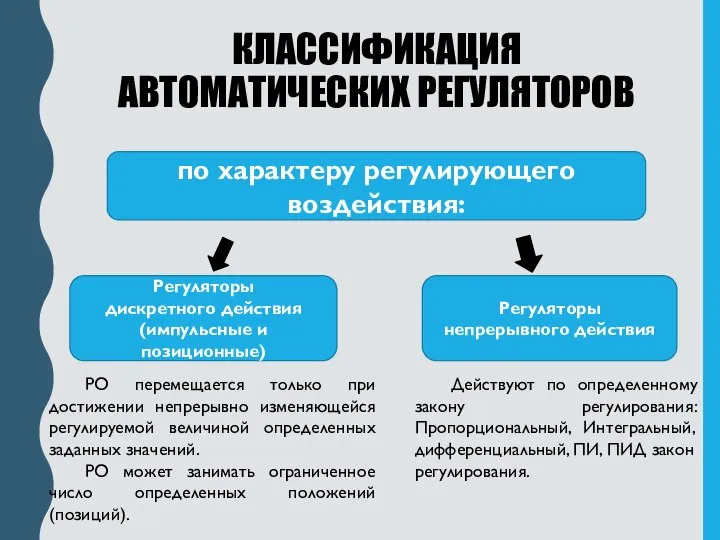
- 12. по характеру регулирующего воздействия: Регуляторы дискретного действия (импульсные и позиционные) Регуляторы непрерывного действия РО перемещается только
- 13. Самостоятельная работа – разобрать принцип действия пропорционального регулятора уровня Источник – Основы автоматики и системы автоматического
- 14. Если при непрерывном изменении входной величины регулирующий орган перемещается непрерывно, то такой регулятор называется регулятором непрерывного
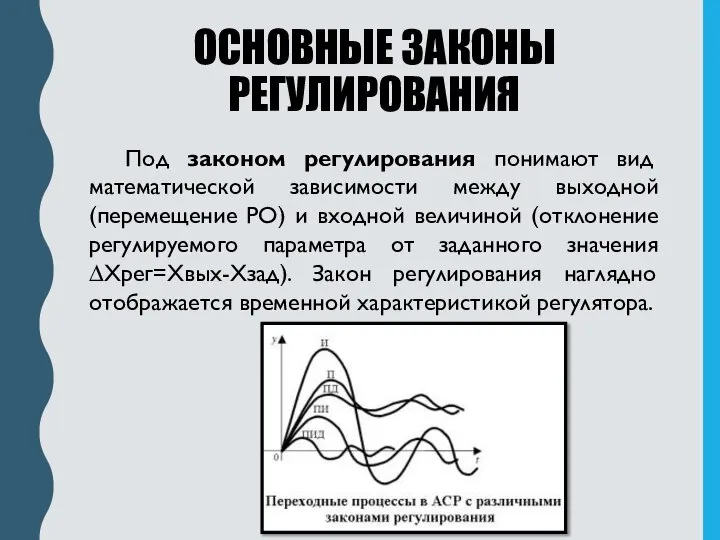
- 15. Под законом регулирования понимают вид математической зависимости между выходной (перемещение РО) и входной величиной (отклонение регулируемого
- 16. Несмотря на большое разнообразие объектов управления и обилие различных технологических процессов, есть типовые законы регулирования, универсально
- 17. Применение типовых законов регулирования позволяет использовать в САР стандартные, серийно выпускаемые регуляторы. Название регулятора дают по
- 18. ЗАКОН РЕГУЛИРОВАНИЯ По закону регулирования регулятора непрерывного действия делятся на: Пропорциональные П-регуляторы (статические); Интегральные И-регуляторы (астатические);
- 19. ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР) - это АР, у которого отклонение регулируемой величины от заданного значения вызывает перемещение
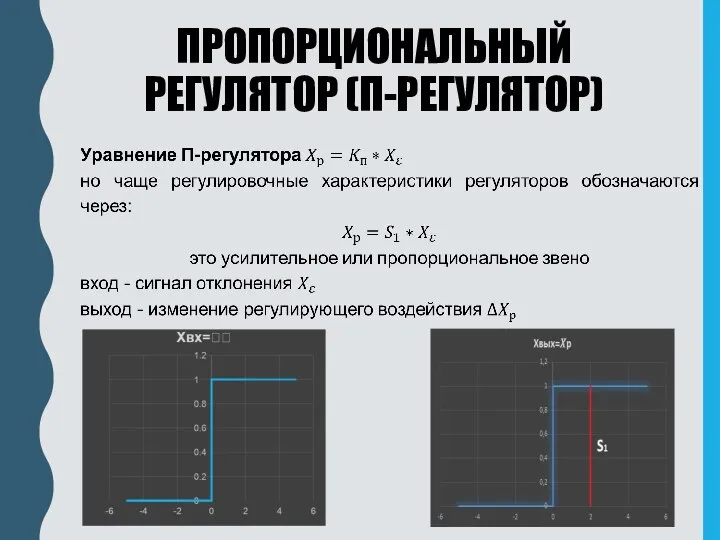
- 20. ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
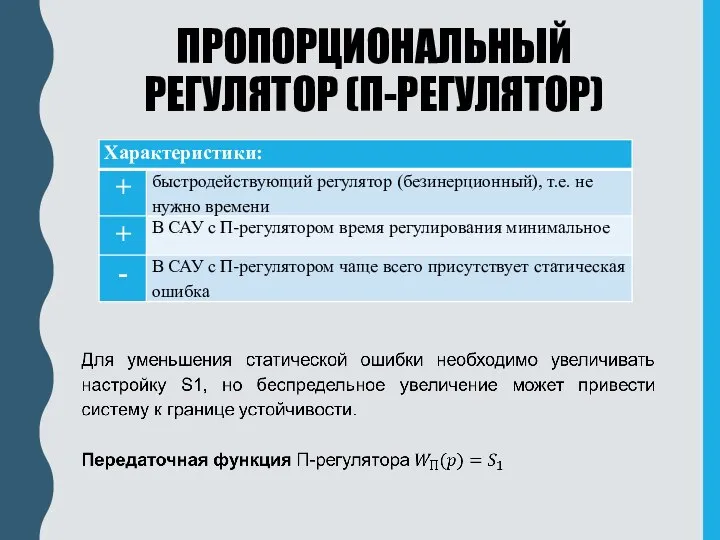
- 21. ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
- 22. ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР) - АР, у которого одному и тому же значению регулируемой величины могут соответствовать
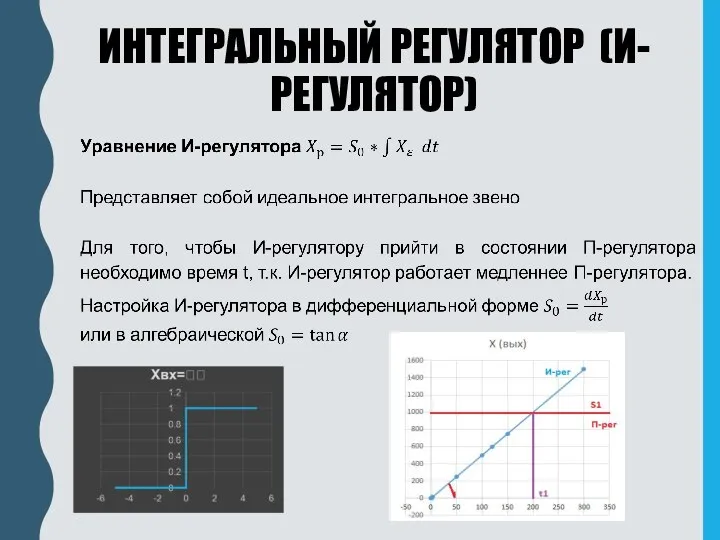
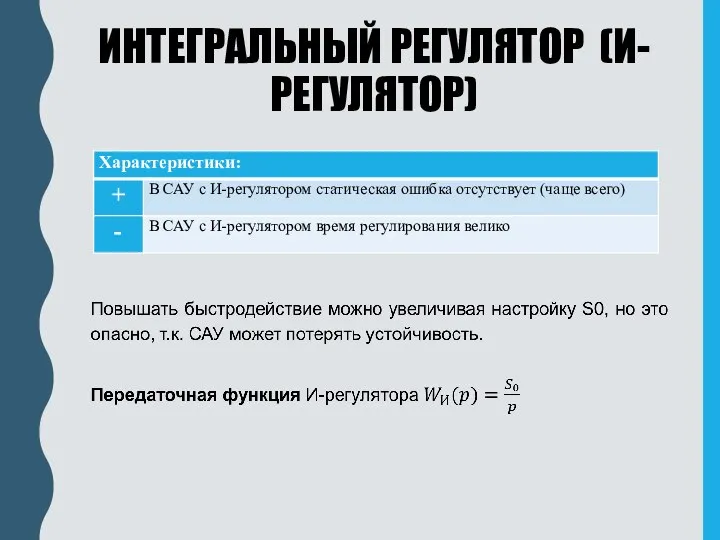
- 23. ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
- 24. ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
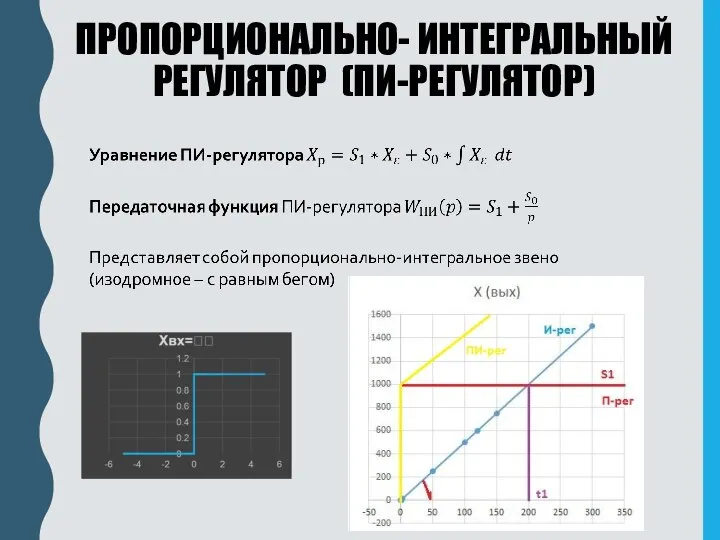
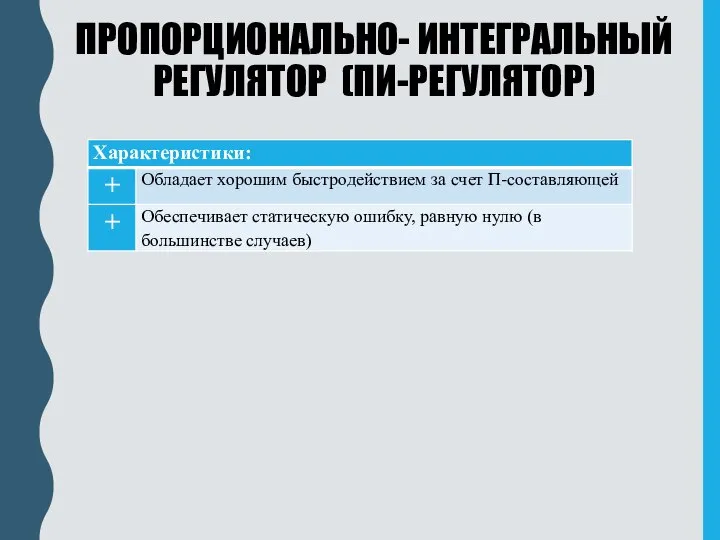
- 25. ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР) - это АР, у которых скорость перемещения РО пропорциональна как отклонению регулируемой
- 26. ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
- 27. ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
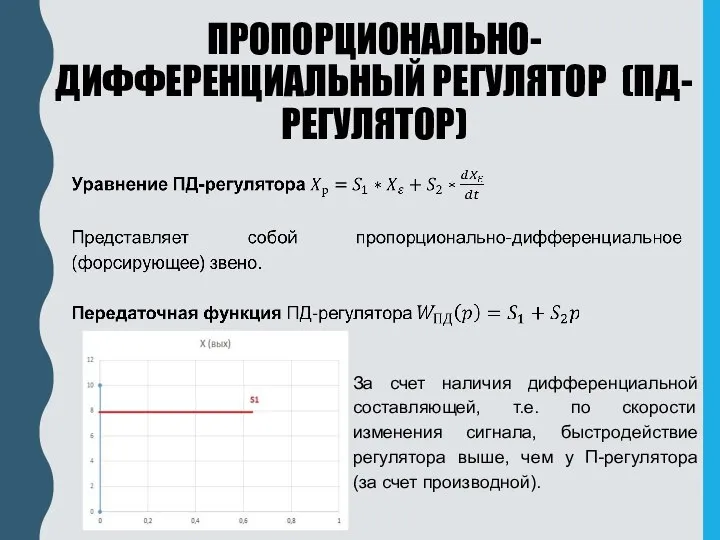
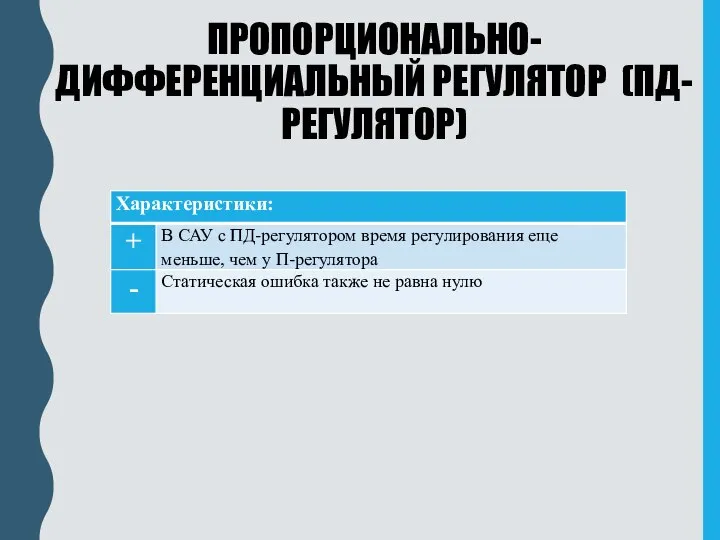
- 28. ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР) За счет наличия дифференциальной составляющей, т.е. по скорости изменения сигнала, быстродействие регулятора
- 29. ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР)
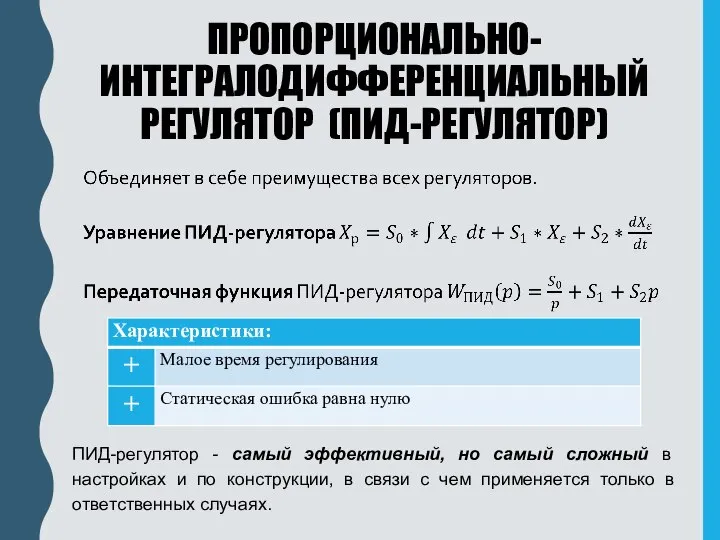
- 30. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛОДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПИД-РЕГУЛЯТОР) ПИД-регулятор - самый эффективный, но самый сложный в настройках и по конструкции, в
- 31. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ Любая САР отвечает своему назначению, если она обеспечивает поддержание
- 32. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Обеспечение устойчивости - основное требование, предъявляемое к любой АСР. Устойчивость системы
- 33. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Устойчивость – основной показатель качества работы САР, зависит от: статических и
- 34. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР При всяком нарушении равновесного состояния в системе возникает переходный процесс. Переходный
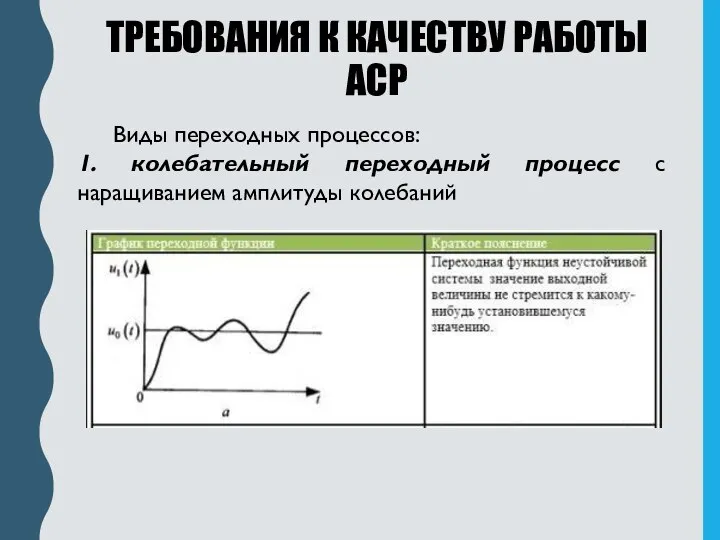
- 35. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Виды переходных процессов: 1. колебательный переходный процесс с наращиванием амплитуды колебаний
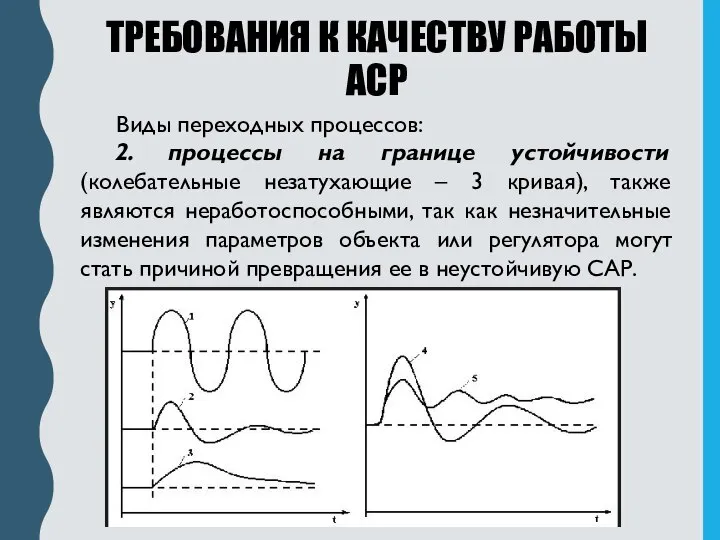
- 36. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Виды переходных процессов: 2. процессы на границе устойчивости (колебательные незатухающие –
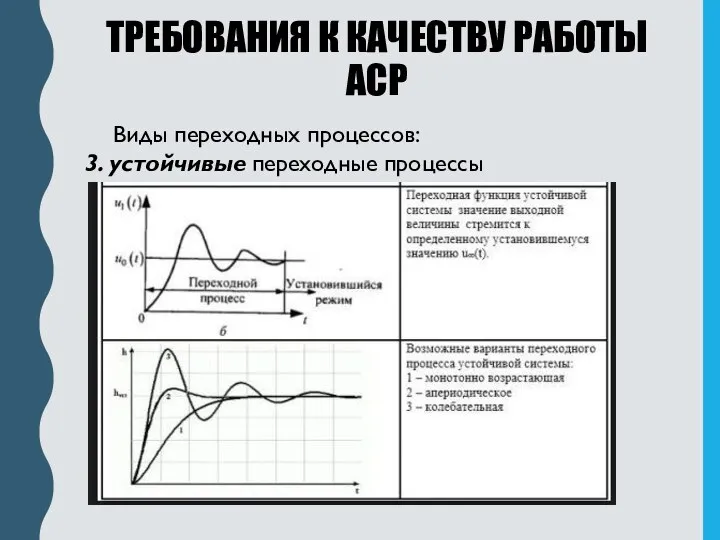
- 37. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Виды переходных процессов: 3. устойчивые переходные процессы
- 38. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Таким образом, устойчивыми являются системы, в которых возможны только апериодические или
- 39. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Прямые качественные показатели процесса автоматического регулирования: максимальное отклонение регулируемой величины от
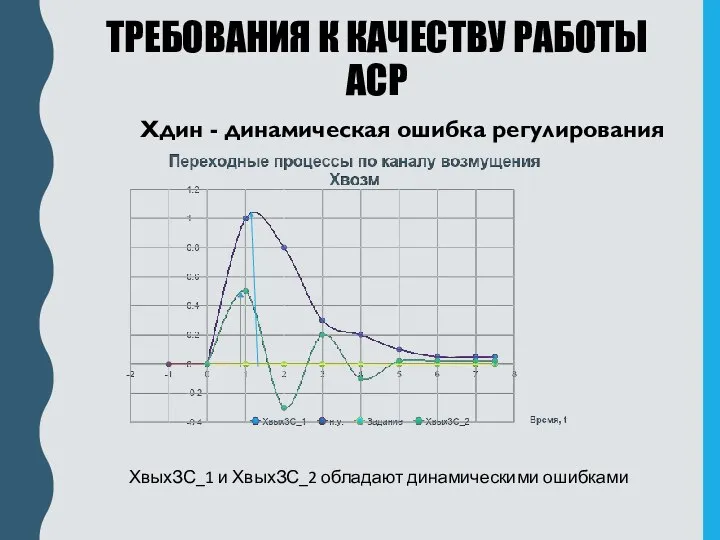
- 40. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Хдин - динамическая ошибка регулирования ХвыхЗС_1 и ХвыхЗС_2 обладают динамическими ошибками
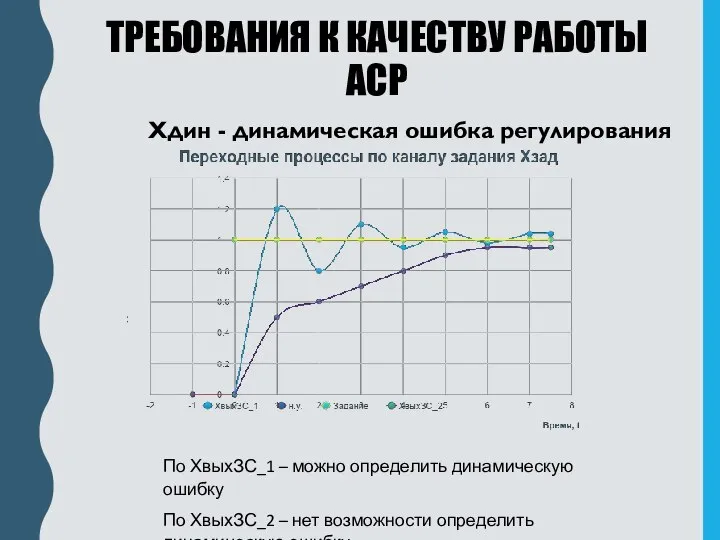
- 41. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Хдин - динамическая ошибка регулирования По ХвыхЗС_1 – можно определить динамическую
- 42. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Прямые качественные показатели процесса автоматического регулирования: Колебательность переходного процесса, связана со
- 43. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Колебательность переходного процесса
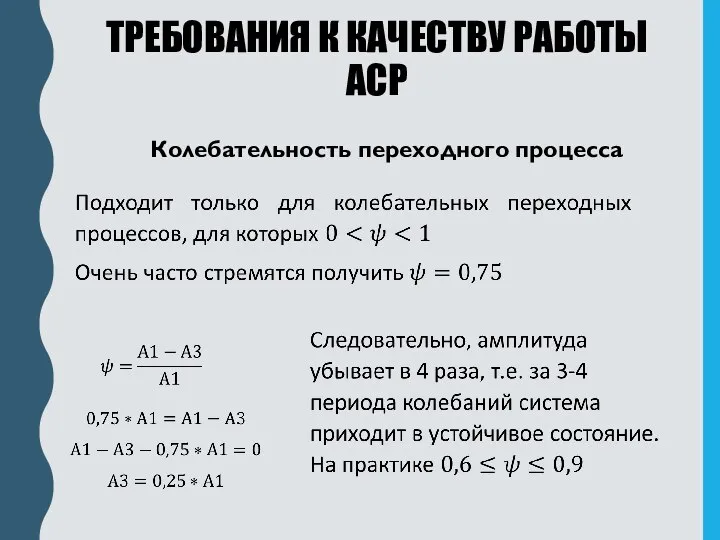
- 44. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Колебательность переходного процесса
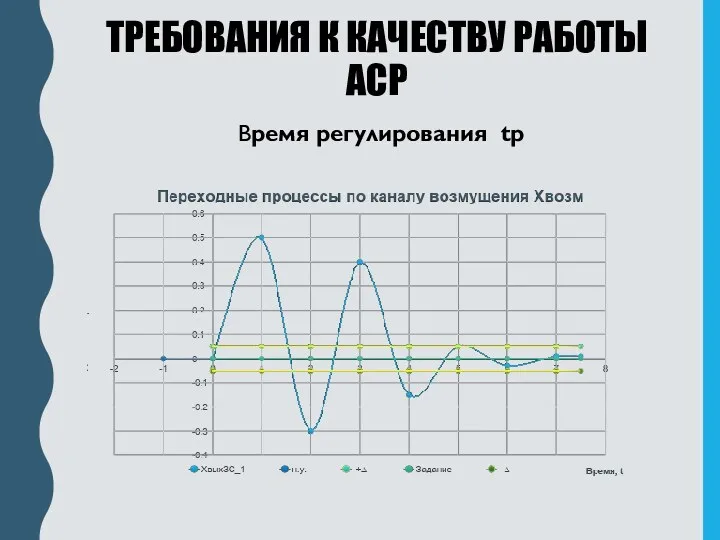
- 45. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Прямые качественные показатели процесса автоматического регулирования: Время регулирования tр – это
- 46. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Время регулирования tр
- 47. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Прямые качественные показатели процесса автоматического регулирования: Остаточное отклонение регулируемой величины Xст
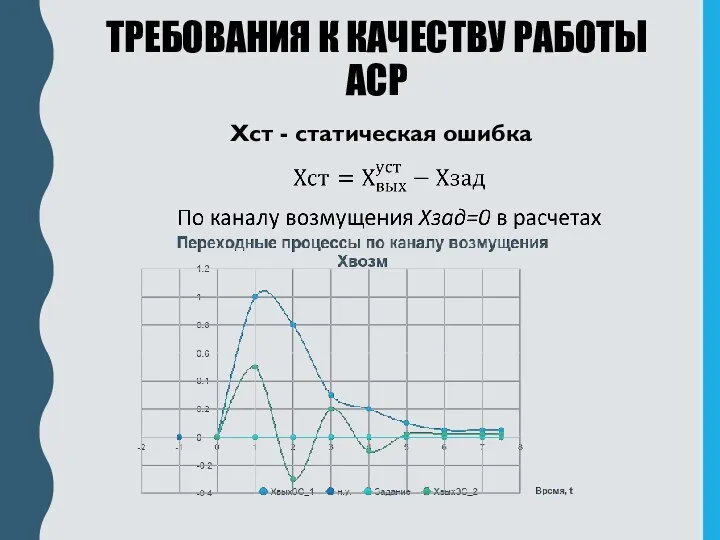
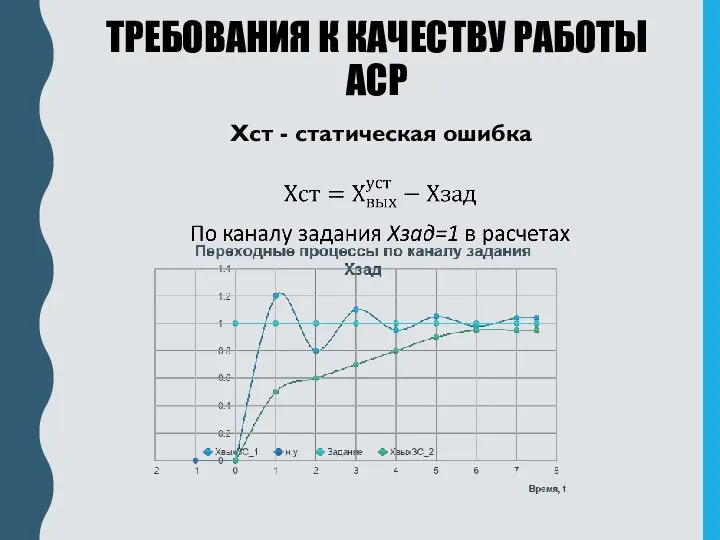
- 48. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Xст - статическая ошибка
- 49. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Xст - статическая ошибка
- 50. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Все вышеперечисленные показатели качества называются прямые показатели качества, они конкурируют между
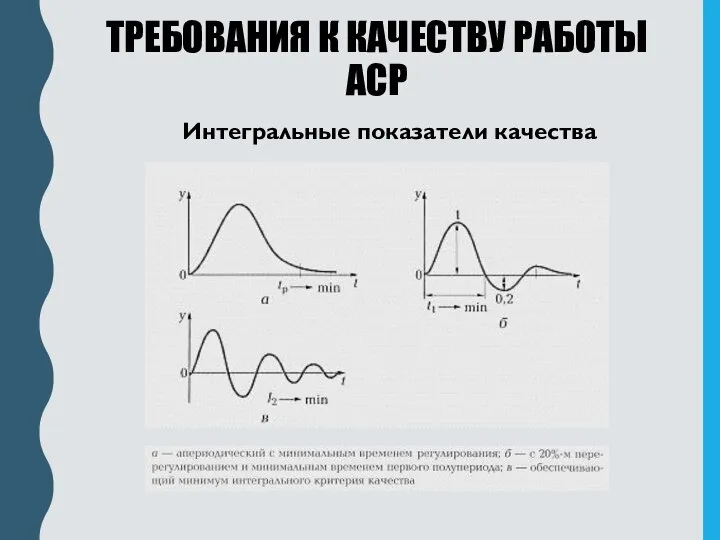
- 51. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 52. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 53. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 54. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 55. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 56. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 57. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Интегральные показатели качества
- 58. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Задачи при построении систем управления Определение параметров аппроксимированной динамической характеристики объекта
- 59. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Задачи при построении систем управления Под выбором типа регулятора подразумевается выбор
- 60. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Регулятор непрерывного действия выбирается исходя из следующих соображений: Область применения интегральных
- 61. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Регулятор непрерывного действия выбирается исходя из следующих соображений: П-регуляторы применяются в
- 62. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Регулятор непрерывного действия выбирается исходя из следующих соображений: Для достижения времени
- 63. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Выбор регулятора Характер переходного процесса в замкнутой САР определяется не только
- 64. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Оптимальные типовые процессы регулирования Апериодический процесс с минимальным временем регулирования. Этот
- 65. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Оптимальные типовые процессы регулирования
- 66. ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР Оптимальные типовые процессы регулирования
- 68. Скачать презентацию
Слайд 2ПОВТОРЕНИЕ:
Объект управления
Датчик
Вторичный прибор
Задающий элемент (задатчик)
Сравнительный элемент (сумматор)
Устройство управления
Регулятор
Исполнительный механизм
Регулирующий орган
Регулирующее воздействие
Управляющее воздействие
ПОВТОРЕНИЕ:
Объект управления
Датчик
Вторичный прибор
Задающий элемент (задатчик)
Сравнительный элемент (сумматор)
Устройство управления
Регулятор
Исполнительный механизм
Регулирующий орган
Регулирующее воздействие
Управляющее воздействие
Слайд 3СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ

Слайд 4РЕГУЛЯТОР
Автоматический регулятор – это автоматическое управляющее устройство, которое вырабатывает регулирующее воздействие в
РЕГУЛЯТОР
Автоматический регулятор – это автоматическое управляющее устройство, которое вырабатывает регулирующее воздействие в
Слайд 5КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Слайд 6КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
По виду регулируемой величины:
регулятор
температуры
регулятор
давления
регулятор
расхода
регулятор
концентрации
и других величин
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
По виду регулируемой величины:
регулятор
температуры
регулятор
давления
регулятор
расхода
регулятор
концентрации
и других величин
Слайд 7По наличию
подводимой энергии:
Регуляторы
прямого действия
Регуляторы
непрямого действия
Не используют внешнюю энергию для процессов управления, используют
По наличию
подводимой энергии:
Регуляторы
прямого действия
Регуляторы
непрямого действия
Не используют внешнюю энергию для процессов управления, используют
Слайд 8По виду используемой энергии:
пневматические
электрические
гидравлические
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Используют энергию сжатого воздуха давлением 0,14МПа
Используют электрическую
По виду используемой энергии:
пневматические
электрические
гидравлические
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Используют энергию сжатого воздуха давлением 0,14МПа
Используют электрическую
Слайд 9По конструктивному оформлению:
Регуляторы
приборного типа
Регуляторы
блочного типа
Регулирующее устройство встроено в корпус прибора и соединено
По конструктивному оформлению:
Регуляторы
приборного типа
Регуляторы
блочного типа
Регулирующее устройство встроено в корпус прибора и соединено
Слайд 10по виду выполняемых функций:
Стабилизирующие
(заданное значение {ЗЗ} постоянно во времени)
Программные
(ЗЗ изменяется во времени
по виду выполняемых функций:
Стабилизирующие
(заданное значение {ЗЗ} постоянно во времени)
Программные
(ЗЗ изменяется во времени
Слайд 11по способу решения задачи управления:
Регуляторы
с аппаратурной реализацией функций управления
Регуляторы
с программной реализацией функций
по способу решения задачи управления:
Регуляторы
с аппаратурной реализацией функций управления
Регуляторы
с программной реализацией функций
Слайд 12по характеру регулирующего воздействия:
Регуляторы
дискретного действия
(импульсные и позиционные)
Регуляторы
непрерывного действия
РО перемещается только при достижении
по характеру регулирующего воздействия:
Регуляторы
дискретного действия
(импульсные и позиционные)
Регуляторы
непрерывного действия
РО перемещается только при достижении
Слайд 13 Самостоятельная работа – разобрать принцип действия пропорционального регулятора уровня
Источник – Основы
Самостоятельная работа – разобрать принцип действия пропорционального регулятора уровня
Источник – Основы
Слайд 14 Если при непрерывном изменении входной величины регулирующий орган перемещается непрерывно, то такой
Если при непрерывном изменении входной величины регулирующий орган перемещается непрерывно, то такой

Слайд 15 Под законом регулирования понимают вид математической зависимости между выходной (перемещение РО) и
Под законом регулирования понимают вид математической зависимости между выходной (перемещение РО) и
Слайд 16 Несмотря на большое разнообразие объектов управления и обилие различных технологических процессов, есть
Несмотря на большое разнообразие объектов управления и обилие различных технологических процессов, есть

Слайд 17 Применение типовых законов регулирования позволяет использовать в САР стандартные, серийно выпускаемые регуляторы.
Название
Применение типовых законов регулирования позволяет использовать в САР стандартные, серийно выпускаемые регуляторы.
Название

Слайд 18ЗАКОН РЕГУЛИРОВАНИЯ
По закону регулирования регулятора непрерывного действия делятся на:
Пропорциональные П-регуляторы (статические);
Интегральные И-регуляторы
ЗАКОН РЕГУЛИРОВАНИЯ
По закону регулирования регулятора непрерывного действия делятся на:
Пропорциональные П-регуляторы (статические);
Интегральные И-регуляторы
Слайд 19ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
- это АР, у которого отклонение регулируемой величины от
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
- это АР, у которого отклонение регулируемой величины от
Слайд 20ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
Слайд 21ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР (П-РЕГУЛЯТОР)
Слайд 22ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
- АР, у которого одному и тому же значению
ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
- АР, у которого одному и тому же значению
Слайд 23ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
Слайд 24ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (И-РЕГУЛЯТОР)
Слайд 25ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
- это АР, у которых скорость перемещения РО
ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
- это АР, у которых скорость перемещения РО
Слайд 26ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
Слайд 27ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР (ПИ-РЕГУЛЯТОР)
Слайд 28ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР)
За счет наличия дифференциальной составляющей, т.е. по скорости изменения
ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР)
За счет наличия дифференциальной составляющей, т.е. по скорости изменения
Слайд 29ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР)
ПРОПОРЦИОНАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПД-РЕГУЛЯТОР)
Слайд 30ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛОДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПИД-РЕГУЛЯТОР)
ПИД-регулятор - самый эффективный, но самый сложный в настройках и
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛОДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР (ПИД-РЕГУЛЯТОР)
ПИД-регулятор - самый эффективный, но самый сложный в настройках и
Слайд 31ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
Любая САР отвечает своему назначению, если
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
Любая САР отвечает своему назначению, если
Слайд 32ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Обеспечение устойчивости - основное требование, предъявляемое к
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Обеспечение устойчивости - основное требование, предъявляемое к
Слайд 33ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Устойчивость – основной показатель качества работы САР,
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Устойчивость – основной показатель качества работы САР,
Слайд 34ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
При всяком нарушении равновесного состояния в системе возникает
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
При всяком нарушении равновесного состояния в системе возникает
Слайд 35ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
1. колебательный переходный процесс с наращиванием
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
1. колебательный переходный процесс с наращиванием
Слайд 36ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
2. процессы на границе устойчивости
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
2. процессы на границе устойчивости
Слайд 37ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
3. устойчивые переходные процессы
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Виды переходных процессов:
3. устойчивые переходные процессы
Слайд 38ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Таким образом, устойчивыми являются системы, в которых возможны
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Таким образом, устойчивыми являются системы, в которых возможны
Слайд 39ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
максимальное отклонение регулируемой
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
максимальное отклонение регулируемой
Слайд 40ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Хдин - динамическая ошибка регулирования
ХвыхЗС_1 и ХвыхЗС_2 обладают
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Хдин - динамическая ошибка регулирования
ХвыхЗС_1 и ХвыхЗС_2 обладают
Слайд 41ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Хдин - динамическая ошибка регулирования
По ХвыхЗС_1 – можно
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Хдин - динамическая ошибка регулирования
По ХвыхЗС_1 – можно
Слайд 42ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Колебательность переходного процесса,
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Колебательность переходного процесса,
Слайд 43ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Колебательность переходного процесса
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Колебательность переходного процесса
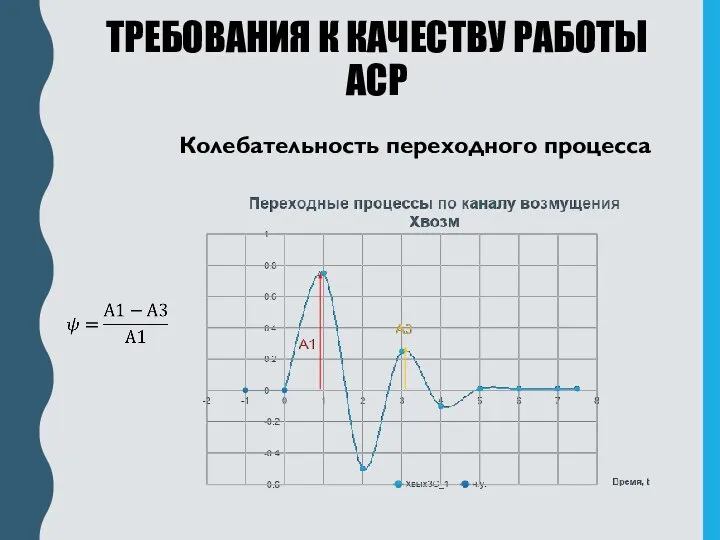
Слайд 44ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Колебательность переходного процесса
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Колебательность переходного процесса
Слайд 45ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Время регулирования tр
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Время регулирования tр
Слайд 46ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Время регулирования tр
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Время регулирования tр
Слайд 47ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Остаточное отклонение регулируемой
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Прямые качественные показатели процесса автоматического регулирования:
Остаточное отклонение регулируемой
Слайд 48ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Xст - статическая ошибка
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Xст - статическая ошибка
Слайд 49ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Xст - статическая ошибка
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Xст - статическая ошибка
Слайд 50ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Все вышеперечисленные показатели качества называются прямые показатели качества,
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Все вышеперечисленные показатели качества называются прямые показатели качества,
Слайд 51ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
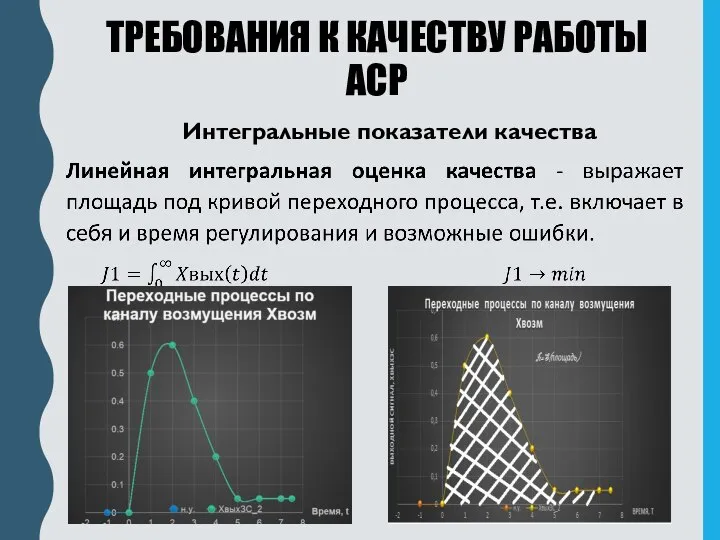
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
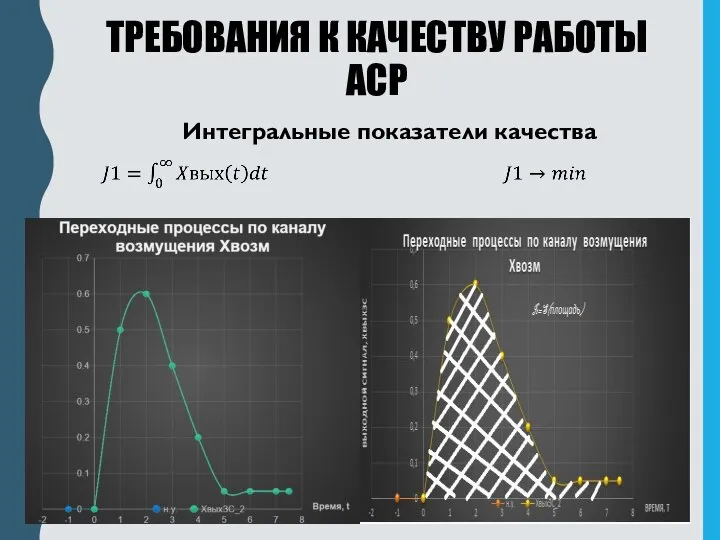
Интегральные показатели качества
Слайд 52ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
Слайд 53ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
Слайд 54ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества

Слайд 55ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества

Слайд 56ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
Слайд 57ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Интегральные показатели качества
Слайд 58ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Задачи при построении систем управления
Определение параметров аппроксимированной динамической
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Задачи при построении систем управления
Определение параметров аппроксимированной динамической
Слайд 59ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Задачи при построении систем управления
Под выбором типа регулятора
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Задачи при построении систем управления
Под выбором типа регулятора
Слайд 60ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
Область
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
Область
Слайд 61ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
П-регуляторы
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
П-регуляторы
Слайд 62ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
Для
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Регулятор непрерывного действия выбирается исходя из следующих соображений:
Для
Слайд 63ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Выбор регулятора
Характер переходного процесса в замкнутой САР определяется
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Выбор регулятора
Характер переходного процесса в замкнутой САР определяется
Слайд 64ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
Апериодический процесс с минимальным временем
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
Апериодический процесс с минимальным временем
Слайд 65ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
Слайд 66ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
ТРЕБОВАНИЯ К КАЧЕСТВУ РАБОТЫ АСР
Оптимальные типовые процессы регулирования
 Деятельность Комитета по ПОД/ФТ
Деятельность Комитета по ПОД/ФТ Современные направления использования мобильных технологий как средства связи человека и технологических устройств TIBO - пленарн
Современные направления использования мобильных технологий как средства связи человека и технологических устройств TIBO - пленарн Социальные сети, как инструмент взаимодействия с клиентом
Социальные сети, как инструмент взаимодействия с клиентом Гражданская оборона
Гражданская оборона Отто фон Бисмарк в судьбе Германской империи
Отто фон Бисмарк в судьбе Германской империи В мастерской кондитера
В мастерской кондитера В
В Языковые средства в рекламе
Языковые средства в рекламе Визитная карточка участников кукольного спектакля по мотивам сказки Два жадных медвежонка
Визитная карточка участников кукольного спектакля по мотивам сказки Два жадных медвежонка Итоговая государственная аттестация выпускников 9-х классов
Итоговая государственная аттестация выпускников 9-х классов Отели Краснодарского края, работающие на все включено
Отели Краснодарского края, работающие на все включено ШКОЛЬНАЯ БИБЛИОТЕКАмуниципальногообщеобразовательногоучреждения«Гимназия № 45» Кировского района города Ростов-на-Дону
ШКОЛЬНАЯ БИБЛИОТЕКАмуниципальногообщеобразовательногоучреждения«Гимназия № 45» Кировского района города Ростов-на-Дону ЛЮБИМЫЕ ПРАЗДНИКИ ГЕРМАНИИ
ЛЮБИМЫЕ ПРАЗДНИКИ ГЕРМАНИИ Повышение потребительского доверия в банковском секторе Таджикистана
Повышение потребительского доверия в банковском секторе Таджикистана Детский совет при уполномоченном по правам ребенка
Детский совет при уполномоченном по правам ребенка Русские природные заповедники
Русские природные заповедники увтро
увтро Разработка ПО через тестирование поведения средствами Cucumber
Разработка ПО через тестирование поведения средствами Cucumber 20170912_granitsy_rossii._territoriya_i_chasovye_poyasa.1
20170912_granitsy_rossii._territoriya_i_chasovye_poyasa.1 Международные и региональные валютно-кредитные и финансовые организации. Лекция 10
Международные и региональные валютно-кредитные и финансовые организации. Лекция 10 Гражданин, государство и право
Гражданин, государство и право Алфавит на английском
Алфавит на английском Словосочетание
Словосочетание Профессии мам
Профессии мам Закономерности и проблемы в мире чисел Кудренко Юлия 10 б класс
Закономерности и проблемы в мире чисел Кудренко Юлия 10 б класс Германия на пути к единству
Германия на пути к единству Изготовление обласа у Кондинских манси
Изготовление обласа у Кондинских манси Теория предпринимательства
Теория предпринимательства