СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИЙ МАШИННОГО ЗРЕНИЯ: ТРЕБОВАНИЯ, ПРОБЛЕМЫ, РЕШЕНИЯ
- СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИЙ МАШИННОГО ЗРЕНИЯ: ТРЕБОВАНИЯ, ПРОБЛЕМЫ, РЕШЕНИЯ

Содержание
- 2. Требования к системам необходимость функционирования системы в условиях широкой номенклатуры объектов и сцен, круглосуточности и всепогодности;
- 3. Требования к системам реализация в бортовой системе управления режимов автоматического обнаружения, локализации объектов сцены и определения
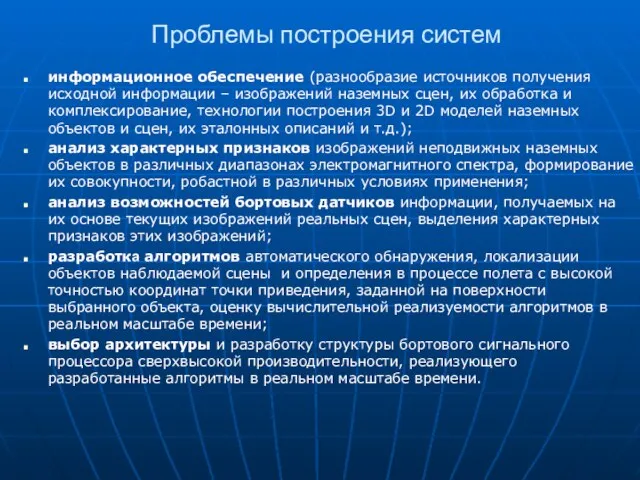
- 4. Проблемы построения систем информационное обеспечение (разнообразие источников получения исходной информации – изображений наземных сцен, их обработка
- 5. Источники получения исходной информации: спутниковые снимки высокого разрешения авиационные снимки крупного масштаба снимки, получаемые с помощью
- 6. База данных
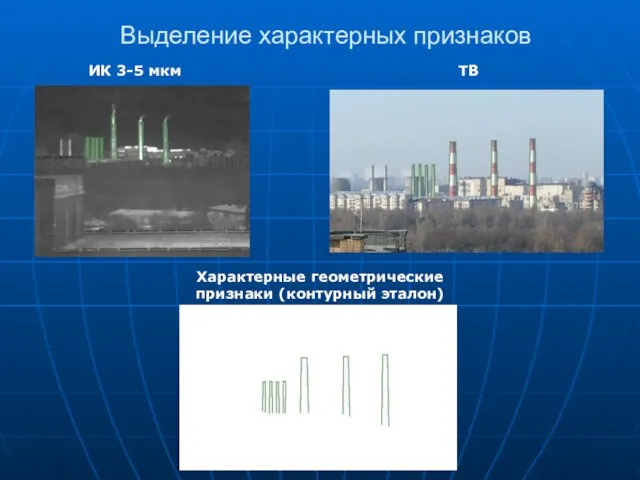
- 7. Выделение характерных признаков ИК 3-5 мкм ТВ Характерные геометрические признаки (контурный эталон)
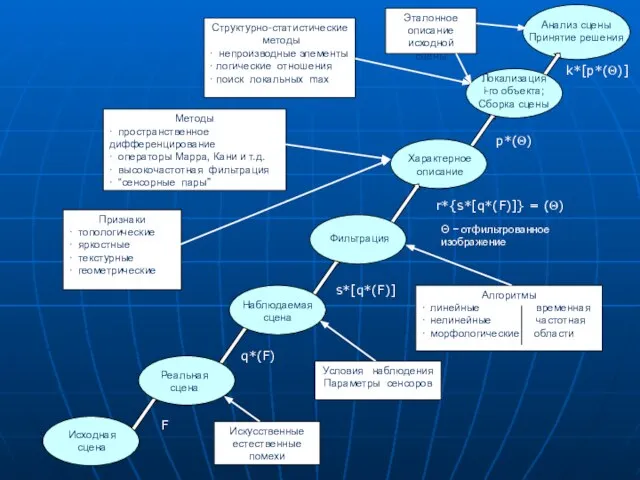
- 8. Θ − отфильтрованное изображение Анализ сцены Принятие решения Характерное описание Эталонное описание исходной сцены Структурно-статистические методы
- 9. Примеры контурных эталонов (КЭ) Текущее изображение (фрагмент) Алгоритм обнаружения и распознавания объектов сцены
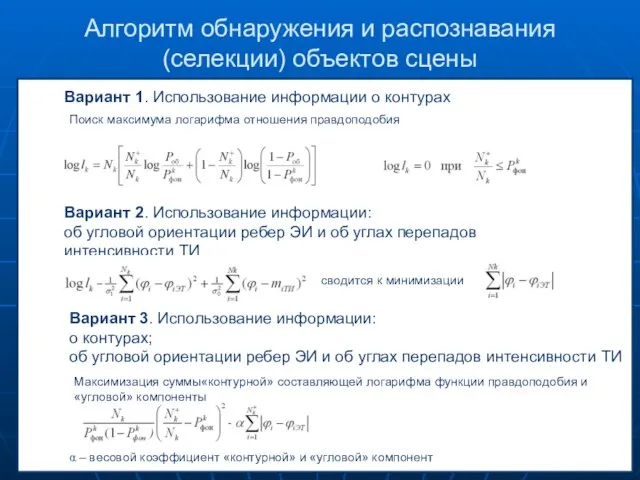
- 10. Алгоритм обнаружения и распознавания (селекции) объектов сцены Вариант 1. Использование информации о контурах Поиск максимума логарифма
- 12. Скачать презентацию
Слайд 2Требования к системам
необходимость функционирования системы в условиях широкой номенклатуры объектов и сцен,
Требования к системам
необходимость функционирования системы в условиях широкой номенклатуры объектов и сцен,

Слайд 3Требования к системам
реализация в бортовой системе управления режимов автоматического обнаружения, локализации объектов
Требования к системам
реализация в бортовой системе управления режимов автоматического обнаружения, локализации объектов

Слайд 4Проблемы построения систем
информационное обеспечение (разнообразие источников получения исходной информации – изображений наземных
Проблемы построения систем
информационное обеспечение (разнообразие источников получения исходной информации – изображений наземных
Слайд 5Источники получения исходной информации:
спутниковые снимки высокого разрешения
авиационные снимки крупного масштаба
снимки, получаемые
Источники получения исходной информации:
спутниковые снимки высокого разрешения
авиационные снимки крупного масштаба
снимки, получаемые

Слайд 6База данных
База данных

Слайд 7Выделение характерных признаков
ИК 3-5 мкм
ТВ
Характерные геометрические признаки (контурный эталон)
Выделение характерных признаков
ИК 3-5 мкм
ТВ
Характерные геометрические признаки (контурный эталон)
Слайд 8Θ − отфильтрованное изображение
Анализ сцены
Принятие решения
Характерное
описание
Эталонное
описание исходной сцены
Структурно-статистические методы
∙ непроизводные элементы
∙ логические
Θ − отфильтрованное изображение
Анализ сцены
Принятие решения
Характерное
описание
Эталонное
описание исходной сцены
Структурно-статистические методы
∙ непроизводные элементы
∙ логические
Слайд 9Примеры контурных эталонов (КЭ)
Текущее изображение (фрагмент)
Алгоритм обнаружения и распознавания
объектов сцены
Примеры контурных эталонов (КЭ)
Текущее изображение (фрагмент)
Алгоритм обнаружения и распознавания
объектов сцены

Слайд 10Алгоритм обнаружения и распознавания (селекции) объектов сцены
Вариант 1. Использование информации о контурах
Поиск
Алгоритм обнаружения и распознавания (селекции) объектов сцены
Вариант 1. Использование информации о контурах
Поиск
 Психология личности. Подходы
Психология личности. Подходы Портрет в годы Великой Отечественной Войны
Портрет в годы Великой Отечественной Войны лекция 1
лекция 1 О вы, служительницы Музы!
О вы, служительницы Музы! Устройство на компютъра
Устройство на компютъра А.Н Островского «Гроза»
А.Н Островского «Гроза» Современное видение правовых основ государства устойчивого развития
Современное видение правовых основ государства устойчивого развития Пособия ФСС по-новому
Пособия ФСС по-новому Мировая практика применения индекса цитирования при проведении и оценке научных исследованийчасть 2
Мировая практика применения индекса цитирования при проведении и оценке научных исследованийчасть 2 Сечение поверхностей плоскостью. Тело с вырезом
Сечение поверхностей плоскостью. Тело с вырезом 254119
254119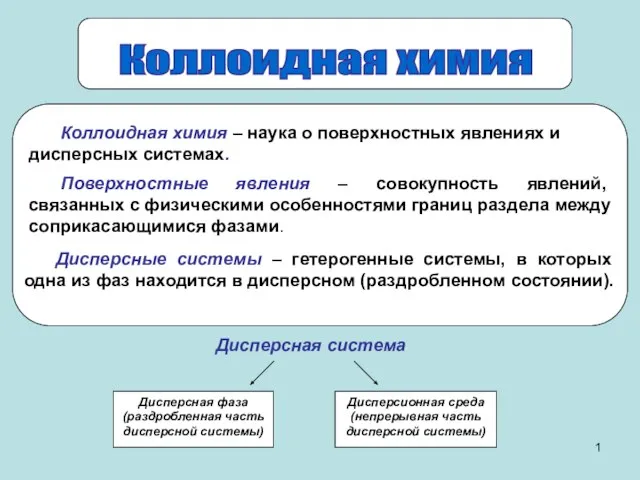 Презентация на тему Коллоидная химия
Презентация на тему Коллоидная химия Основные образовательные парадигмы
Основные образовательные парадигмы Регата для парусных яхт по маршруту Санкт-Петербург — Котка
Регата для парусных яхт по маршруту Санкт-Петербург — Котка Роль участкового специалиста в обеспечении социальных гарантий и мер социальной поддержки отдельных категорий граждан
Роль участкового специалиста в обеспечении социальных гарантий и мер социальной поддержки отдельных категорий граждан Учимся не путать звуки [ с ] и [ ч ]
Учимся не путать звуки [ с ] и [ ч ] ChefАвтоматизация в Облаках
ChefАвтоматизация в Облаках В гости к зиме. Неживая природа зимой
В гости к зиме. Неживая природа зимой Противодействие идеологии терроризма, экстремизма и гармонизация межнациональных отношений
Противодействие идеологии терроризма, экстремизма и гармонизация межнациональных отношений Презентация на тему Золотая осень. Составление рассказа
Презентация на тему Золотая осень. Составление рассказа Мотострелковый взвод в обороне
Мотострелковый взвод в обороне Процессуальные теории мотивации
Процессуальные теории мотивации 12-psihosomatika-vozrastnih-izmeneniy-lica
12-psihosomatika-vozrastnih-izmeneniy-lica Культура та первісні вірування людей
Культура та первісні вірування людей Оборудования лаборатории
Оборудования лаборатории Презентация на тему Промышленные отходы
Презентация на тему Промышленные отходы  Дистанционный курс: разработка, построение, проведение
Дистанционный курс: разработка, построение, проведение Polyester. Synthetic Fibres the Fabric of Society
Polyester. Synthetic Fibres the Fabric of Society