- Team 11044. Abstract class “Robot”

Содержание
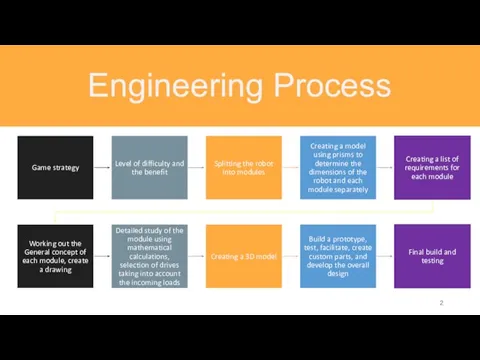
- 2. Engineering Process
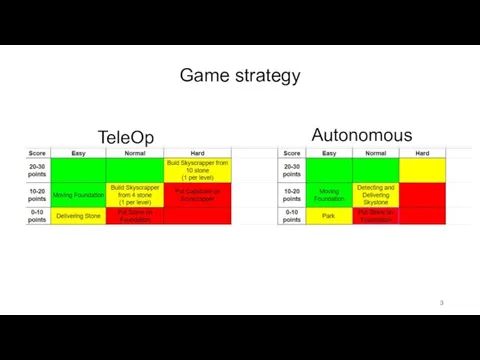
- 3. Game strategy TeleOp Autonomous
- 4. Use AR to see in real life! Use Vuforia View App
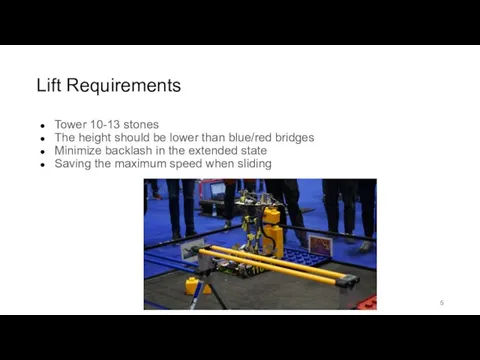
- 5. Lift Requirements Tower 10-13 stones The height should be lower than blue/red bridges Minimize backlash in
- 6. One example: lift Idea and requirements We have experience in creating a similar design Improve the
- 7. Development of a new concept, creation of drawings, mathematical calculations, selection of drives considering physical loads
- 8. Creating a 3D model, correcting errors Building the first final version, testing in a real game
- 9. Something new? Measuring tape The axis of rotation of hooks below the Foundation level Nuts with
- 10. Simple – better!
- 11. Detailed 3D model
- 12. Wheelbase Requirements Wheelbase must move in any direction Max speed should be as fast as we
- 13. Foundation grab Requirements The axis of grabbing hooks is lower than foundation Foundation must have constant
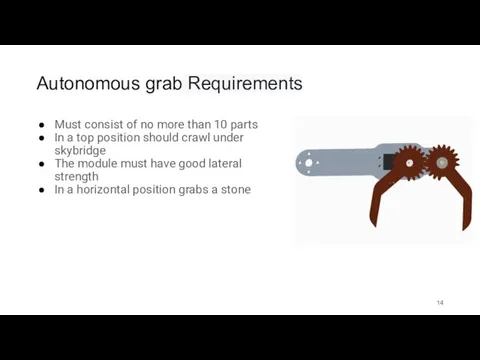
- 14. Autonomous grab Requirements Must consist of no more than 10 parts In a top position should
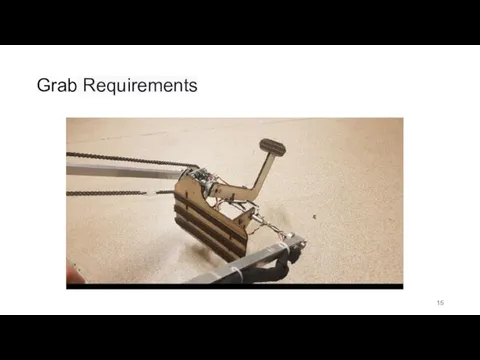
- 15. Grab Requirements
- 16. Building Tape Requirements
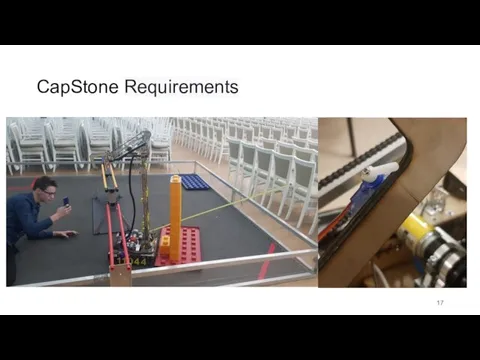
- 17. CapStone Requirements
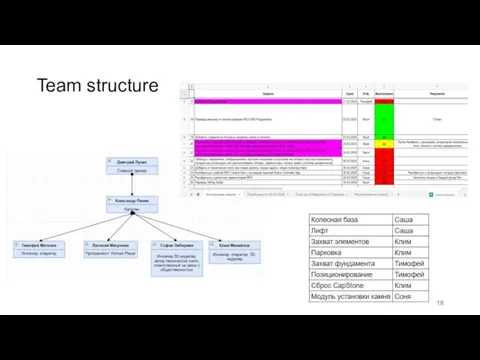
- 18. Team structure
- 19. Before match – check-list!
- 20. Main structure of our program part: Abstract class “Robot” with all basic methods (telemetry; work with
- 21. Core features in driver-controlled period: Grouped controls for connected actions (WB control and stone grabbing) Rotation
- 22. Core features in autonomous period: Several autonomous programs. Dynamic coordinate calculation (with gyro and independent encoders
- 23. About tests and tuning: Method tests with telemetry and logs Autonomous and Driver-controlled periods tests Google
- 24. About version control:
- 25. How to solve problems? Right lead-up Our experience from previous years Other teams experience Prototyping Final
- 27. Скачать презентацию
Слайд 3Game strategy
TeleOp
Autonomous
Game strategy
TeleOp
Autonomous
Слайд 4Use AR to see in real life!
Use Vuforia View App
Use AR to see in real life!
Use Vuforia View App
Слайд 5Lift Requirements
Tower 10-13 stones
The height should be lower than blue/red bridges
Minimize backlash
Lift Requirements
Tower 10-13 stones
The height should be lower than blue/red bridges
Minimize backlash
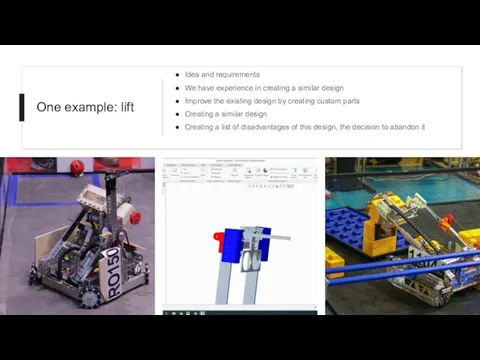
Слайд 6One example: lift
Idea and requirements
We have experience in creating a similar design
Improve
One example: lift
Idea and requirements
We have experience in creating a similar design
Improve
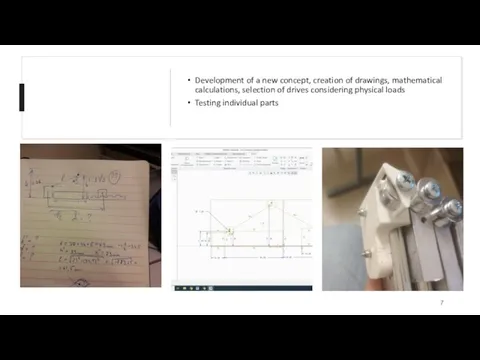
Слайд 7Development of a new concept, creation of drawings, mathematical calculations, selection of
Development of a new concept, creation of drawings, mathematical calculations, selection of
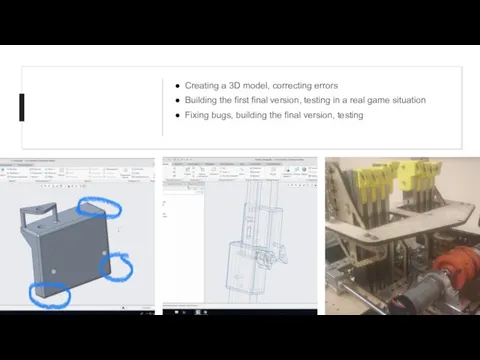
Слайд 8Creating a 3D model, correcting errors
Building the first final version, testing in
Creating a 3D model, correcting errors
Building the first final version, testing in
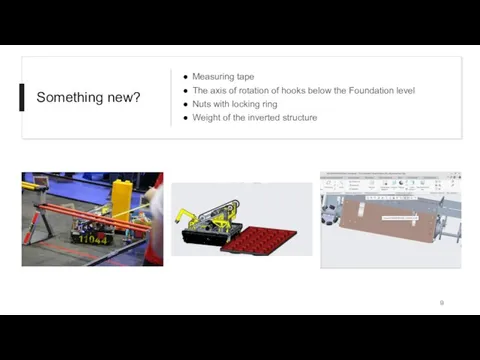
Слайд 9Something new?
Measuring tape
The axis of rotation of hooks below the Foundation level
Nuts
Something new?
Measuring tape
The axis of rotation of hooks below the Foundation level
Nuts
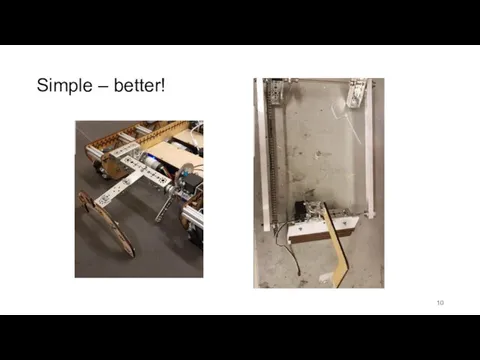
Слайд 10Simple – better!
Simple – better!
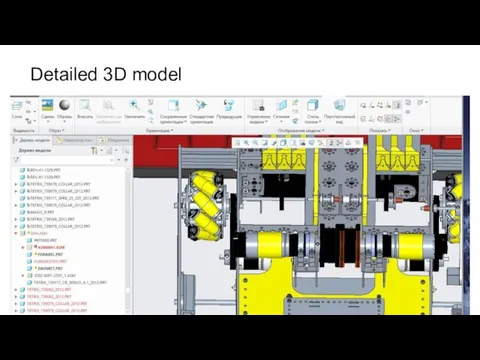
Слайд 11Detailed 3D model
Detailed 3D model
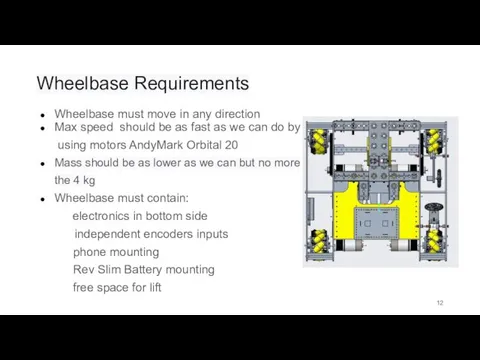
Слайд 12Wheelbase Requirements
Wheelbase must move in any direction
Max speed should be as fast
Wheelbase must move in any direction
Max speed should be as fast
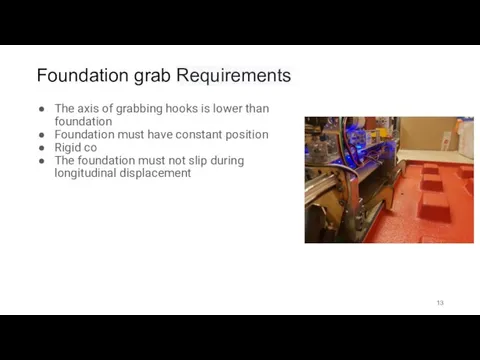
Слайд 13Foundation grab Requirements
The axis of grabbing hooks is lower than foundation
Foundation must
Foundation grab Requirements
The axis of grabbing hooks is lower than foundation
Foundation must
Слайд 14Autonomous grab Requirements
Must consist of no more than 10 parts
In a
Autonomous grab Requirements
Must consist of no more than 10 parts
In a
Слайд 15Grab Requirements
Grab Requirements
Слайд 16Building Tape Requirements
Building Tape Requirements

Слайд 17CapStone Requirements
CapStone Requirements
Слайд 18Team structure
Team structure
Слайд 19
Before match – check-list!
Before match – check-list!
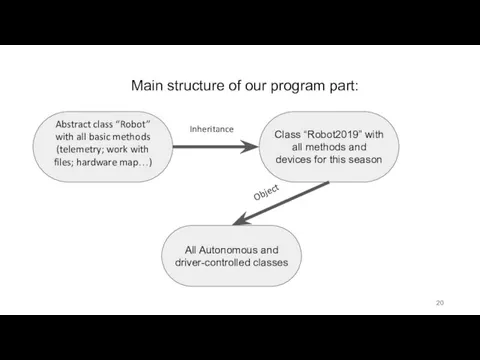
Слайд 20Main structure of our program part:
Abstract class “Robot” with all basic methods
Main structure of our program part:
Abstract class “Robot” with all basic methods
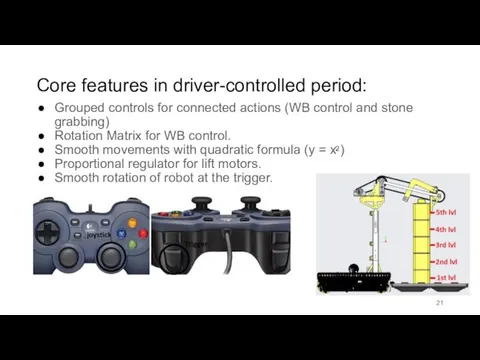
Слайд 21Core features in driver-controlled period:
Grouped controls for connected actions (WB control and
Core features in driver-controlled period:
Grouped controls for connected actions (WB control and
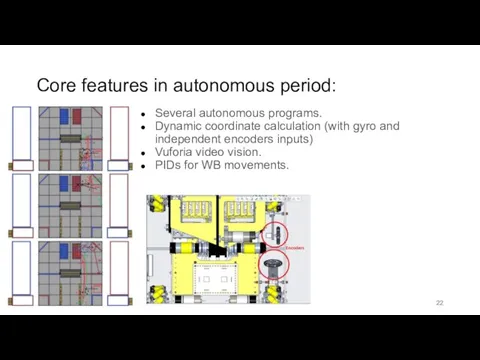
Слайд 22Core features in autonomous period:
Several autonomous programs.
Dynamic coordinate calculation (with gyro and
Core features in autonomous period:
Several autonomous programs.
Dynamic coordinate calculation (with gyro and
Слайд 23About tests and tuning:
Method tests with telemetry and logs
Autonomous and Driver-controlled periods
About tests and tuning:
Method tests with telemetry and logs
Autonomous and Driver-controlled periods
Слайд 24About version control:
About version control:

Слайд 25How to solve problems?
Right lead-up
Our experience from previous years
Other teams experience
Prototyping
Final development
How to solve problems?
Right lead-up
Our experience from previous years
Other teams experience
Prototyping
Final development
 ABBYY TestReader 5.2 Новое в версии 5.2 Калинин Алексей Олегович
ABBYY TestReader 5.2 Новое в версии 5.2 Калинин Алексей Олегович Презентация на тему Организация процесса самообразования в педагогической деятельности учителя
Презентация на тему Организация процесса самообразования в педагогической деятельности учителя Lesson 1
Lesson 1 Урок : «Строение скелета».
Урок : «Строение скелета». Мой класс 1 Г. Первое сентября
Мой класс 1 Г. Первое сентября Возможности Emerson по Продукции и Сервису $ 22,6 Миллиарда - доходы более чем 60 подразделений
Возможности Emerson по Продукции и Сервису $ 22,6 Миллиарда - доходы более чем 60 подразделений «Киевская Русь. Основные направления внутренней и внешней политики киевских князей».
«Киевская Русь. Основные направления внутренней и внешней политики киевских князей». Презентация на тему Трафальгарская площадь
Презентация на тему Трафальгарская площадь Элементы здоровьесбережения в конкурсном уроке Пищулина Анастасия Сергеевна ГБОУ школа № 667
Элементы здоровьесбережения в конкурсном уроке Пищулина Анастасия Сергеевна ГБОУ школа № 667 Презентация на тему ИКТ в работе учителя литературы
Презентация на тему ИКТ в работе учителя литературы Влияние бытовой химии на здоровье человека
Влияние бытовой химии на здоровье человека Береги зрение смолоду
Береги зрение смолоду Контрольная презентация по домашнему чтению
Контрольная презентация по домашнему чтению Свет
Свет Развитие автомобильного направления Mail.Ru Group
Развитие автомобильного направления Mail.Ru Group Решение проблемных ситуаций
Решение проблемных ситуаций Газета. Печать
Газета. Печать И. С. Тургенев Рассказ «Бежин луг»
И. С. Тургенев Рассказ «Бежин луг» История развития выч. техники
История развития выч. техники Презентация на тему Правила безопасного поведения на воде
Презентация на тему Правила безопасного поведения на воде  Диференціація цін тацінова тактика підприемства
Диференціація цін тацінова тактика підприемства Методическое объединение учителей истории и общественных дисциплин МБОУ лиц
Методическое объединение учителей истории и общественных дисциплин МБОУ лиц Организационная культура
Организационная культура Метод проектов в образовательном процессе
Метод проектов в образовательном процессе История о том как Павлик встретил Дашеньку
История о том как Павлик встретил Дашеньку Доходы и расходы по деятельности, связанной с привлечением осужденных к труду
Доходы и расходы по деятельности, связанной с привлечением осужденных к труду Личность и ее социализация
Личность и ее социализация Читаем человека с первого взгляда. Введение. Модуль 1
Читаем человека с первого взгляда. Введение. Модуль 1