- Теория Автоматического Управления

Содержание
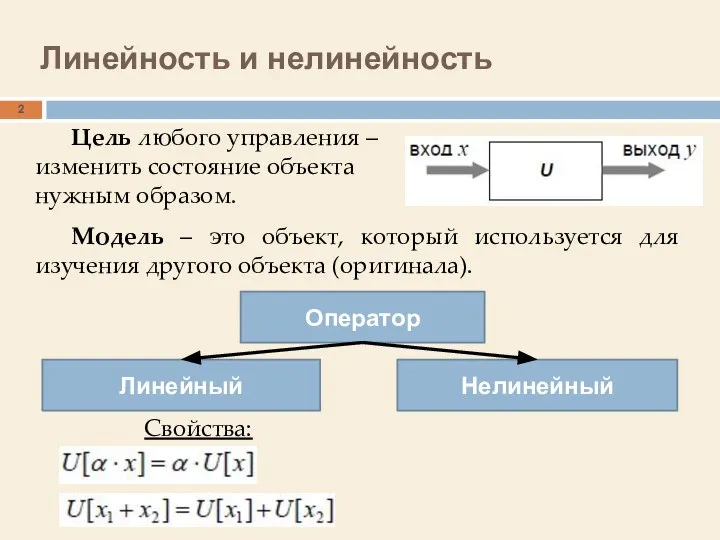
- 2. Линейность и нелинейность Цель любого управления – изменить состояние объекта нужным образом. Модель – это объект,
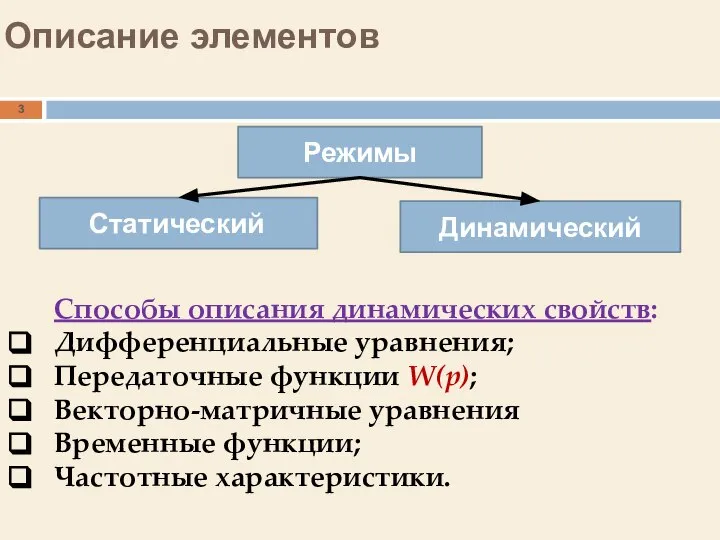
- 3. Описание элементов Способы описания динамических свойств: Дифференциальные уравнения; Передаточные функции W(p); Векторно-матричные уравнения Временные функции; Частотные
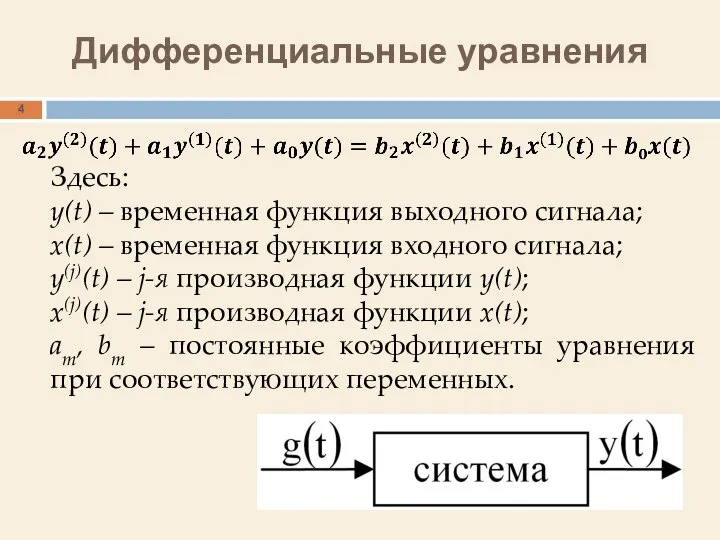
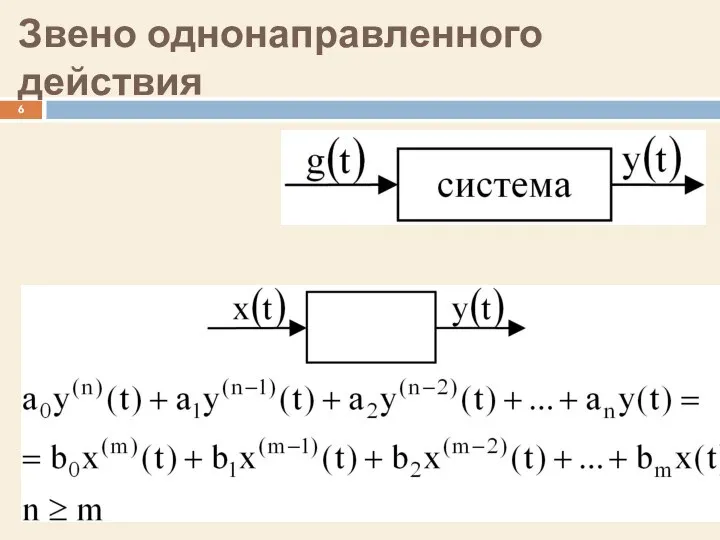
- 4. Дифференциальные уравнения Здесь: y(t) – временная функция выходного сигнала; x(t) – временная функция входного сигнала; y(j)(t)
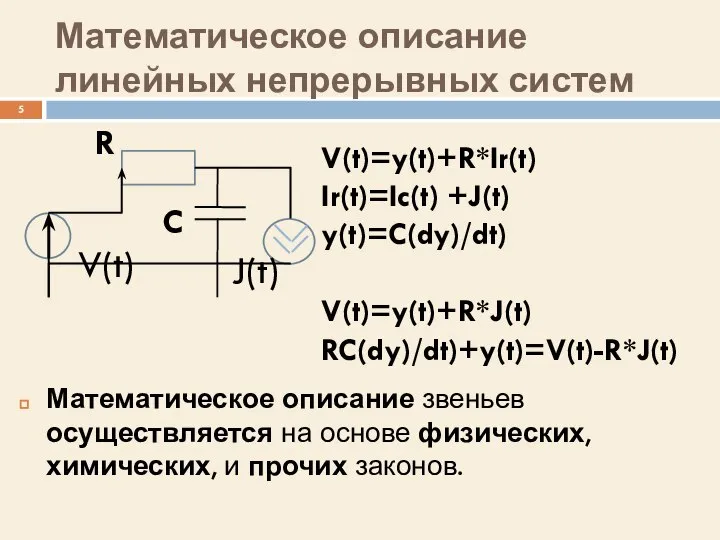
- 5. Математическое описание линейных непрерывных систем Математическое описание звеньев осуществляется на основе физических, химических, и прочих законов.
- 6. Звено однонаправленного действия
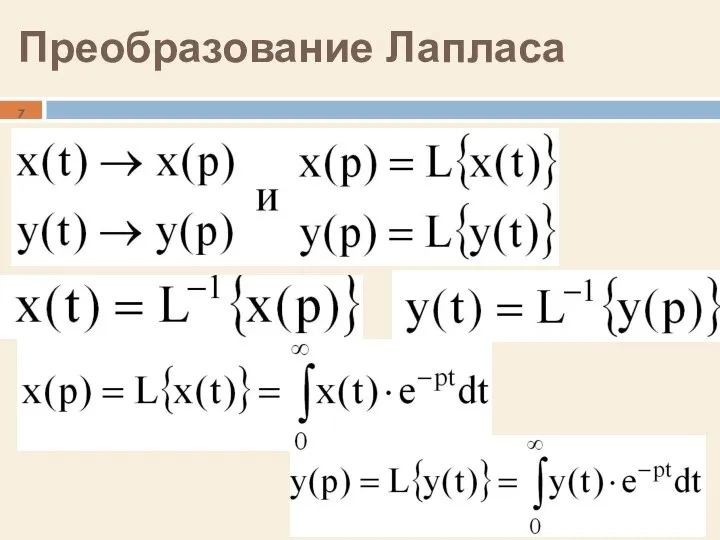
- 7. Преобразование Лапласа
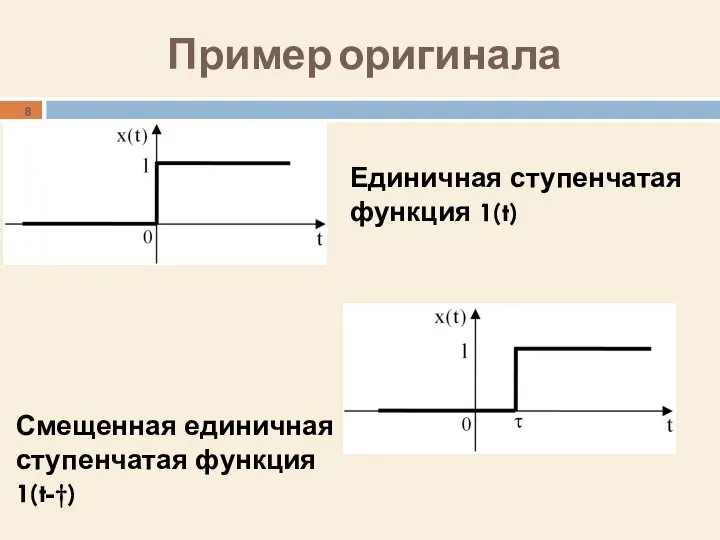
- 8. Пример оригинала Единичная ступенчатая функция 1(t) Смещенная единичная ступенчатая функция 1(t-†)
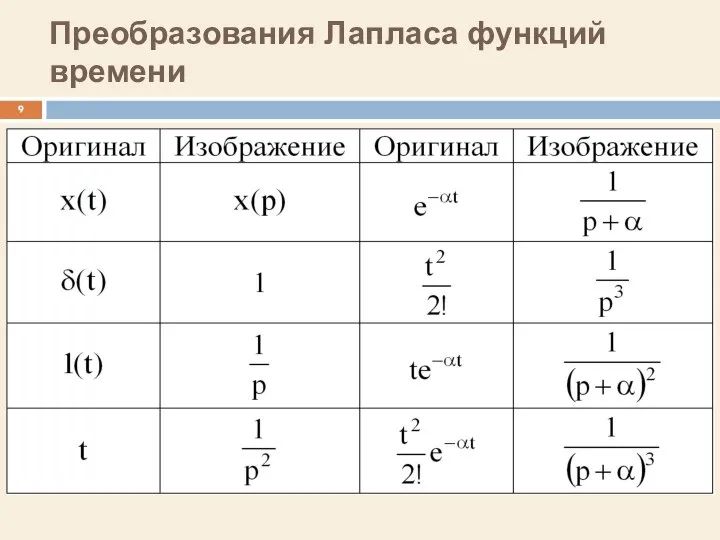
- 9. Преобразования Лапласа функций времени
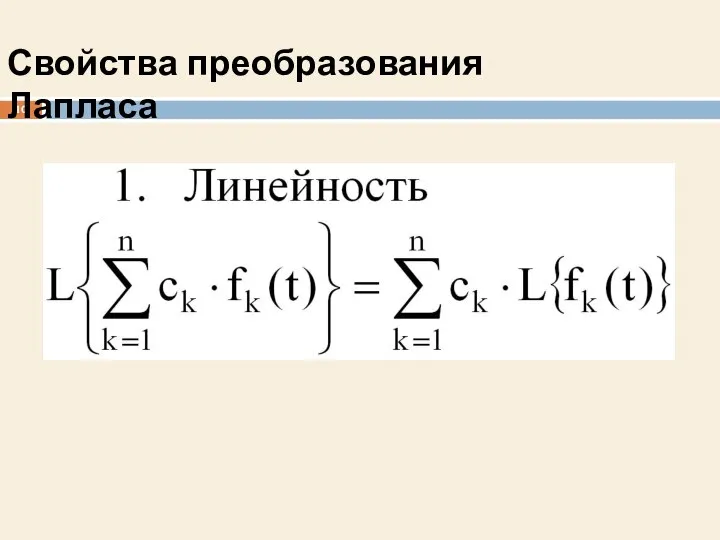
- 10. Свойства преобразования Лапласа
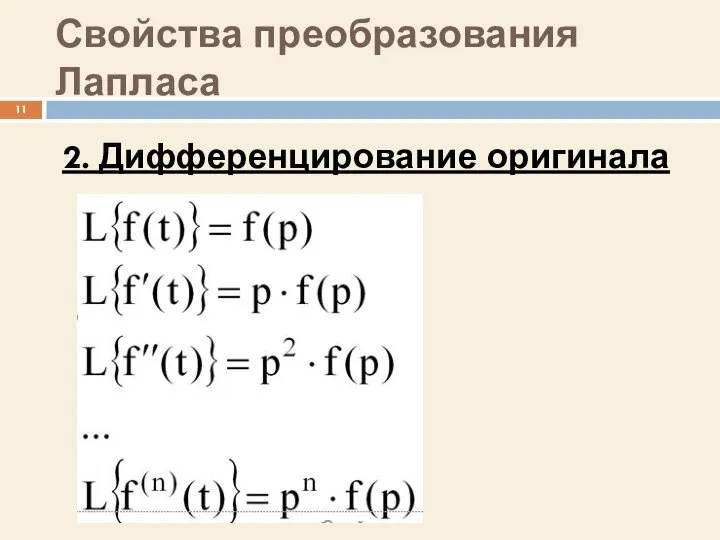
- 11. Свойства преобразования Лапласа 2. Дифференцирование оригинала
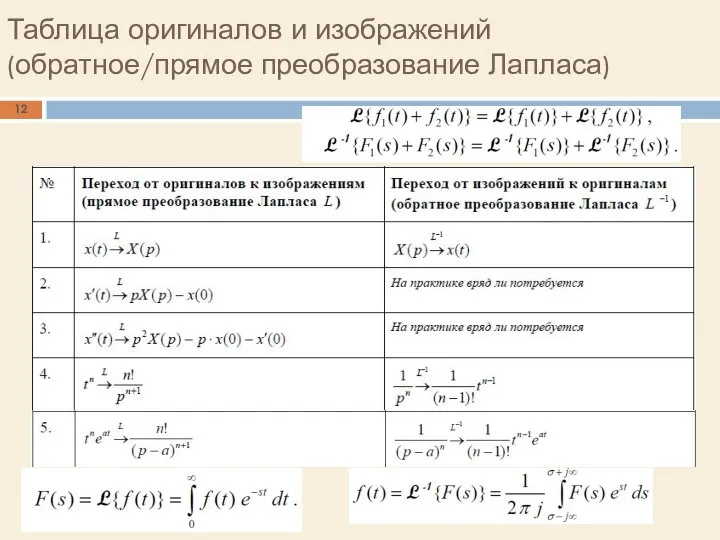
- 12. Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
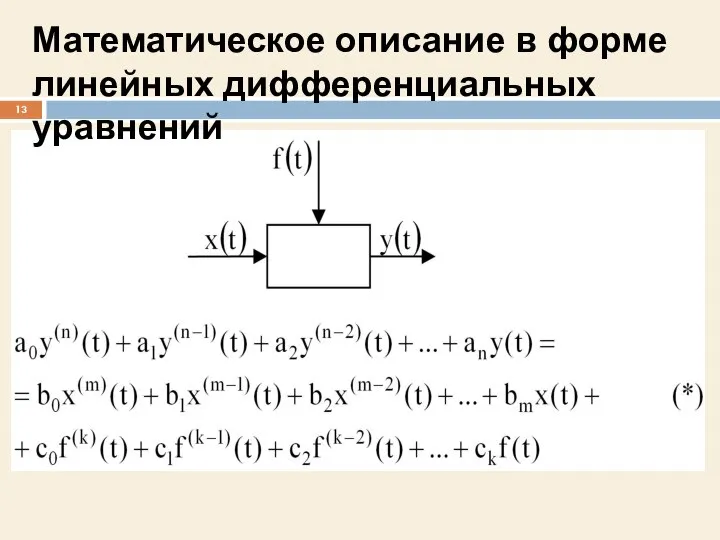
- 13. Математическое описание в форме линейных дифференциальных уравнений
- 14. Математическое описание в форме операторного уравнения
- 15. Математическое описание в форме операторного уравнения
- 16. Математическое описание в форме операторного уравнения
- 17. Передаточная Функция
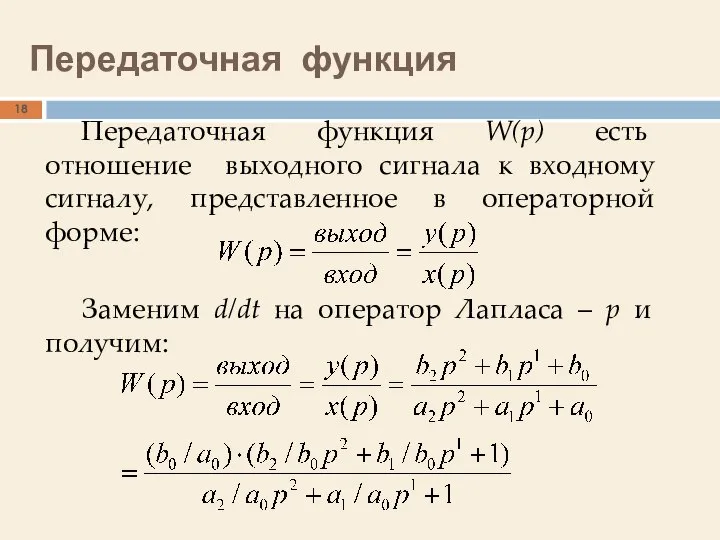
- 18. Передаточная функция Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу, представленное в операторной форме:
- 19. Звено однонаправленного действия
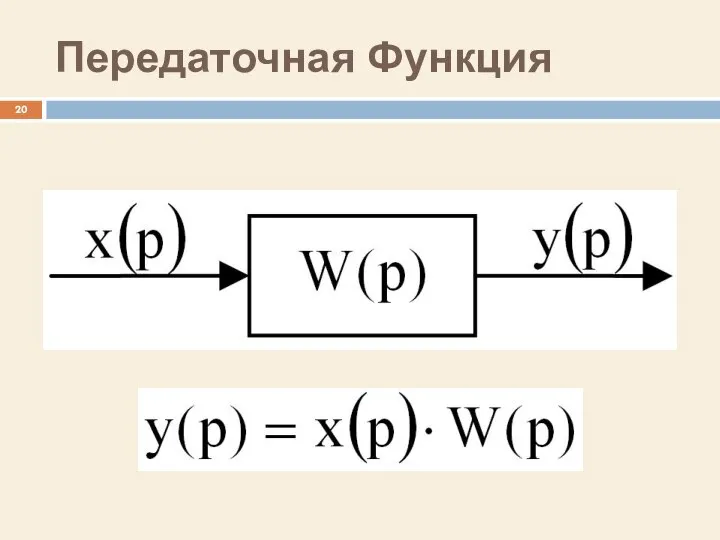
- 20. Передаточная Функция
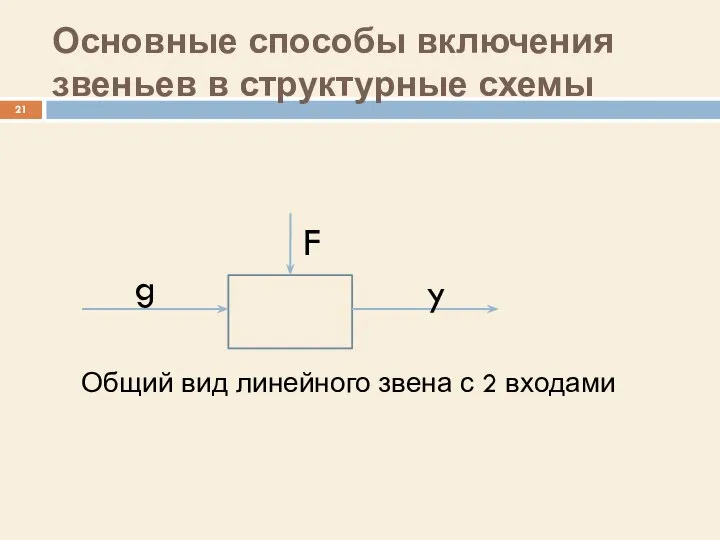
- 21. Основные способы включения звеньев в структурные схемы Общий вид линейного звена с 2 входами
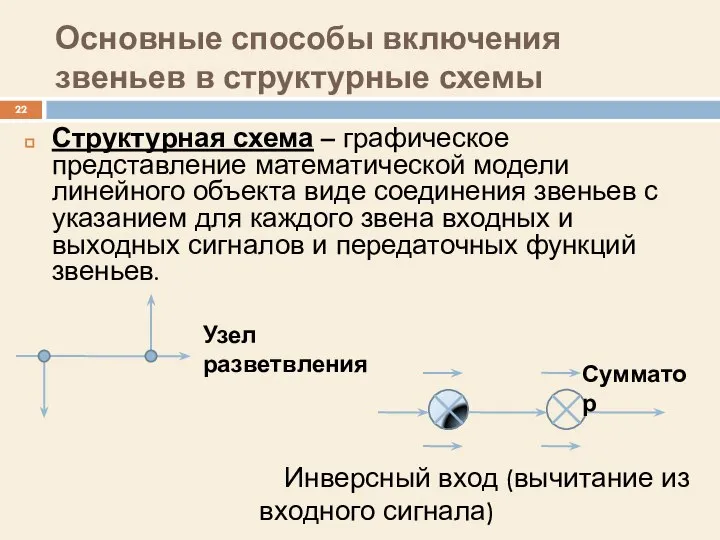
- 22. Основные способы включения звеньев в структурные схемы Инверсный вход (вычитание из входного сигнала) Структурная схема –
- 23. Основные способы соединения 1)Последовательное 2)Параллельное 3)Соединение с обратной связью
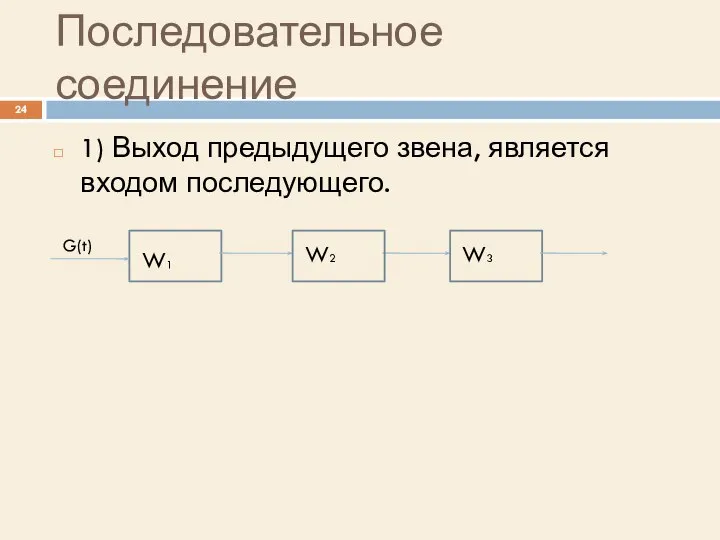
- 24. Последовательное соединение 1) Выход предыдущего звена, является входом последующего. G(t) W1 W2 W3
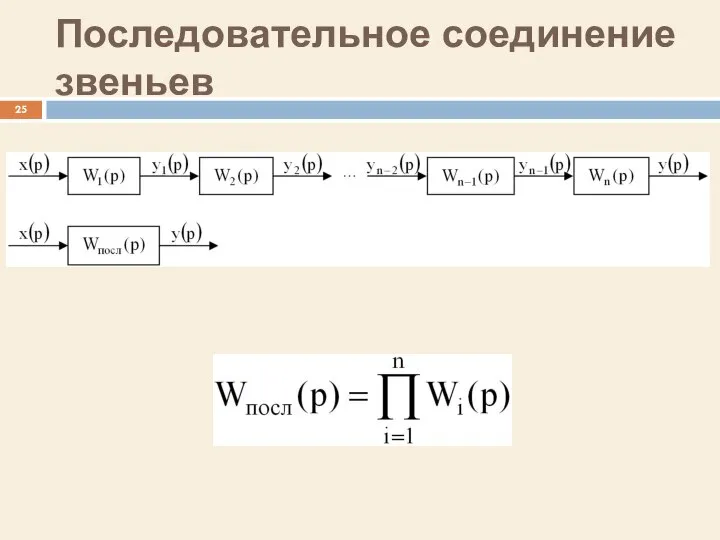
- 25. Последовательное соединение звеньев
- 26. Параллельное соединение Передаточная функция разомкнутой цепи из параллельно соединенных звеньев равна сумме передаточных функций всех звеньев.
- 27. Параллельное соединение звеньев
- 28. Соединение обратной связью Положительная ОС e=g+x Отрицательная ОС e=g-x
- 29. Положительная и отрицательная ОС
- 30. Положительная и отрицательная единичная Обратная Связь
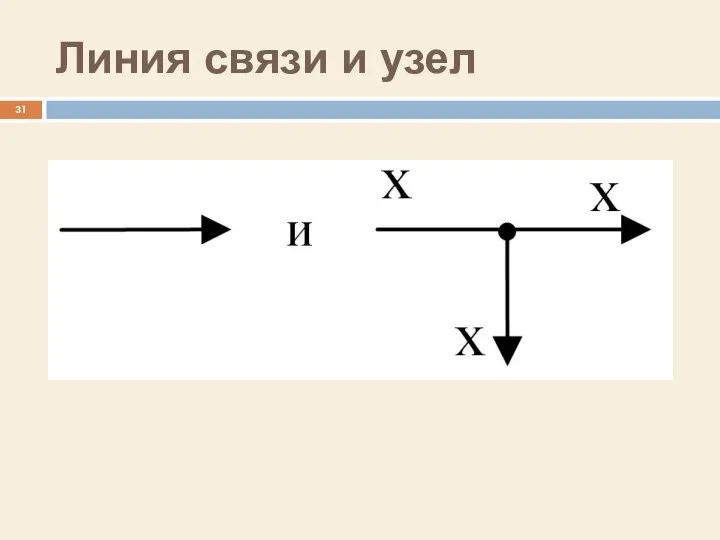
- 31. Линия связи и узел
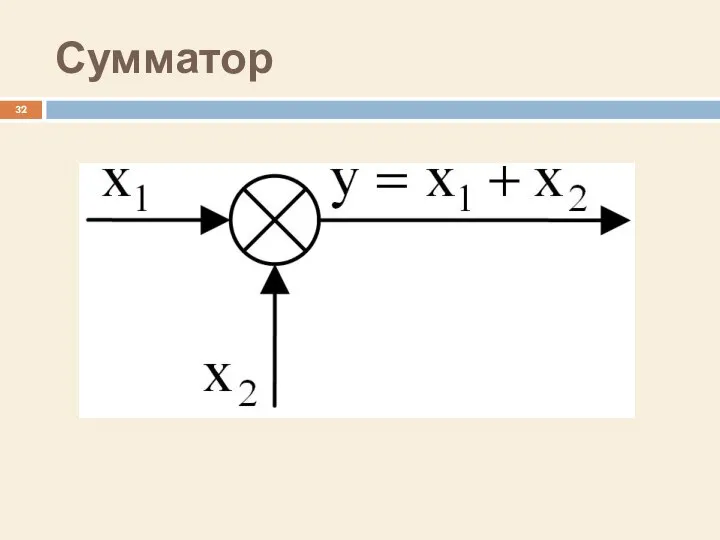
- 32. Сумматор
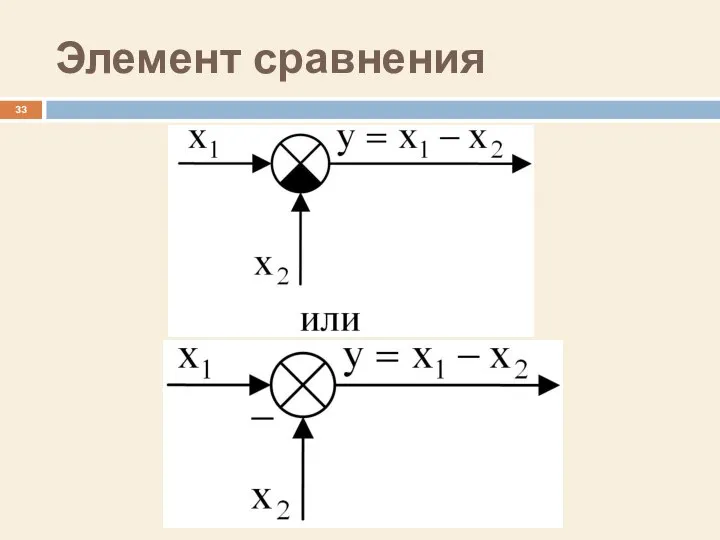
- 33. Элемент сравнения
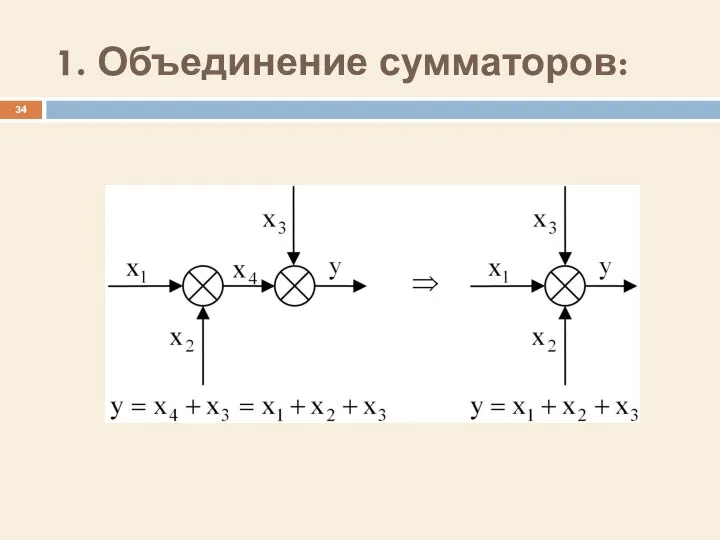
- 34. 1. Объединение сумматоров:
- 35. 1. Объединение сумматоров:
- 36. 2. Перенос сумматора через звено
- 37. 2. Перенос сумматора через звено
- 38. 3. Перенос узла через звено
- 40. Пример структурных преобразований
- 41. Пример структурных преобразований
- 42. Пример структурных преобразований
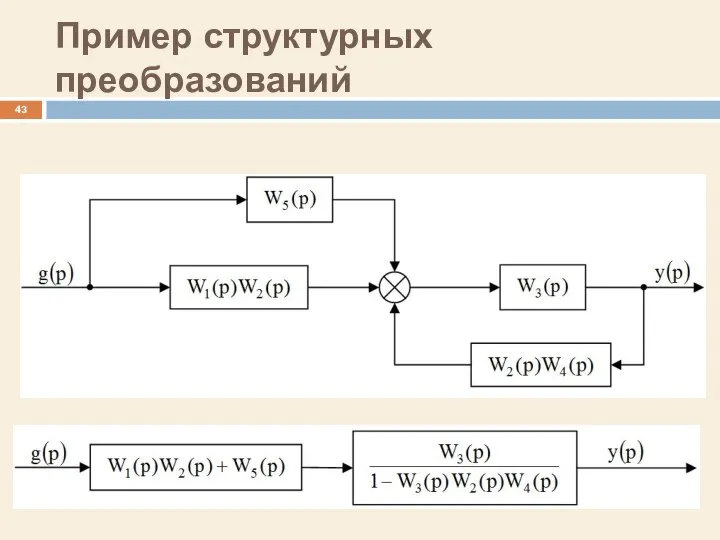
- 43. Пример структурных преобразований
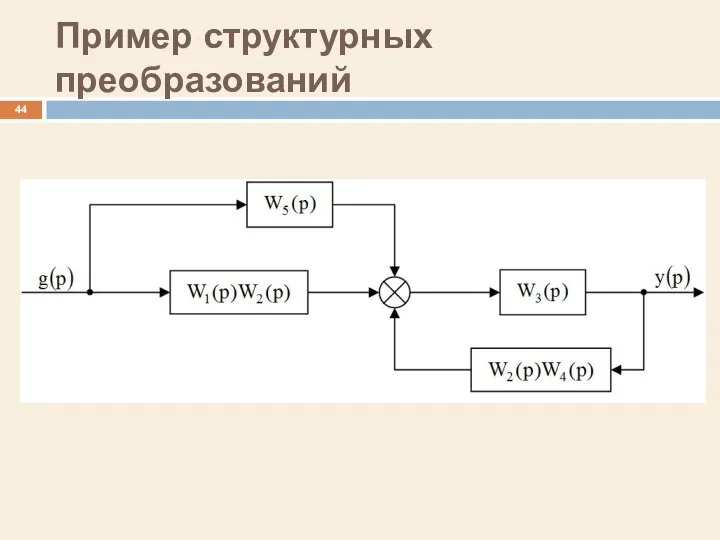
- 44. Пример структурных преобразований
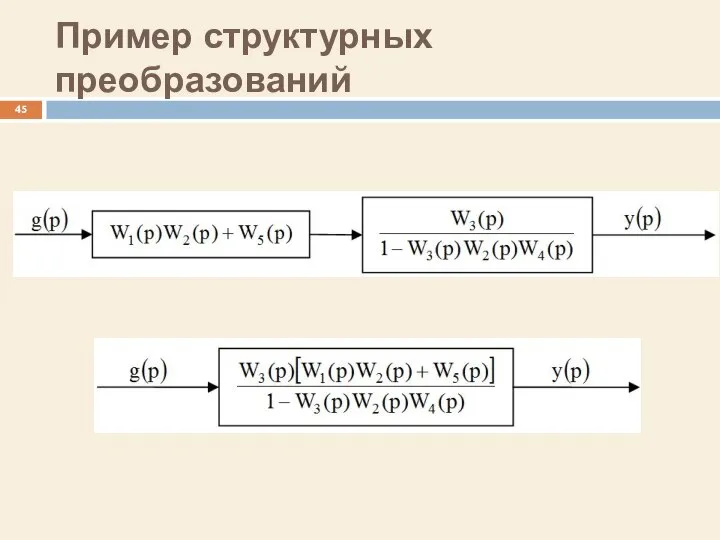
- 45. Пример структурных преобразований
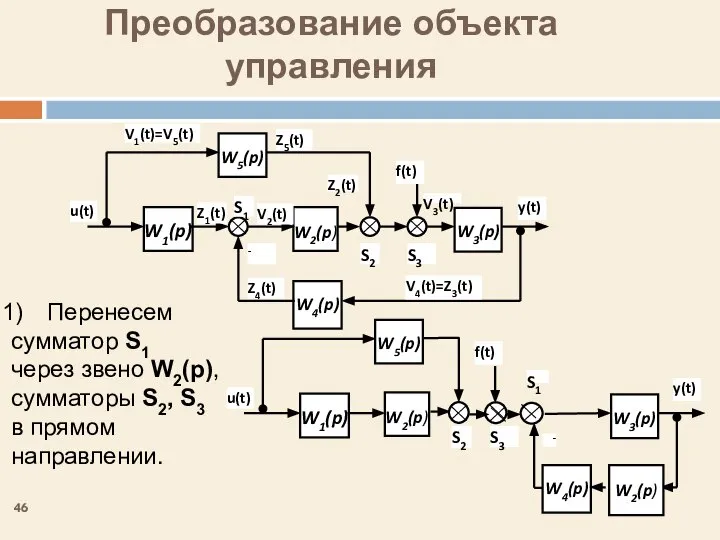
- 46. Преобразование объекта управления Перенесем сумматор S1 через звено W2(p), сумматоры S2, S3 в прямом направлении. S1
- 47. Преобразование объекта управления 3)Перенесем сумматор через звено в прямом направлении. W5(p)+W1(p)∙W2(p) u(t) y(t) 2)Упростим типовые соединения
- 49. Скачать презентацию
Слайд 2Линейность и нелинейность
Цель любого управления –
изменить состояние объекта
нужным образом.
Модель –
Линейность и нелинейность
Цель любого управления –
изменить состояние объекта
нужным образом.
Модель –
Слайд 3Описание элементов
Способы описания динамических свойств:
Дифференциальные уравнения;
Передаточные функции W(p);
Векторно-матричные уравнения
Временные функции;
Частотные характеристики.
Режимы
Статический
Динамический
Описание элементов
Способы описания динамических свойств:
Дифференциальные уравнения;
Передаточные функции W(p);
Векторно-матричные уравнения
Временные функции;
Частотные характеристики.
Режимы
Статический
Динамический
Слайд 4Дифференциальные уравнения
Здесь:
y(t) – временная функция выходного сигнала;
x(t) – временная функция входного сигнала;
y(j)(t)
Дифференциальные уравнения
Здесь:
y(t) – временная функция выходного сигнала;
x(t) – временная функция входного сигнала;
y(j)(t)
Слайд 5Математическое описание линейных непрерывных систем
Математическое описание звеньев осуществляется на основе физических, химических,
Математическое описание линейных непрерывных систем
Математическое описание звеньев осуществляется на основе физических, химических,
Слайд 6Звено однонаправленного действия
Звено однонаправленного действия
Слайд 7Преобразование Лапласа
Преобразование Лапласа
Слайд 8Пример оригинала
Единичная ступенчатая функция 1(t)
Смещенная единичная ступенчатая функция 1(t-†)
Пример оригинала
Единичная ступенчатая функция 1(t)
Смещенная единичная ступенчатая функция 1(t-†)
Слайд 9Преобразования Лапласа функций времени
Преобразования Лапласа функций времени
Слайд 10Свойства преобразования Лапласа
Свойства преобразования Лапласа
Слайд 11Свойства преобразования Лапласа
2. Дифференцирование оригинала
Свойства преобразования Лапласа
2. Дифференцирование оригинала
Слайд 12Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
Слайд 13Математическое описание в форме линейных дифференциальных уравнений
Математическое описание в форме линейных дифференциальных уравнений
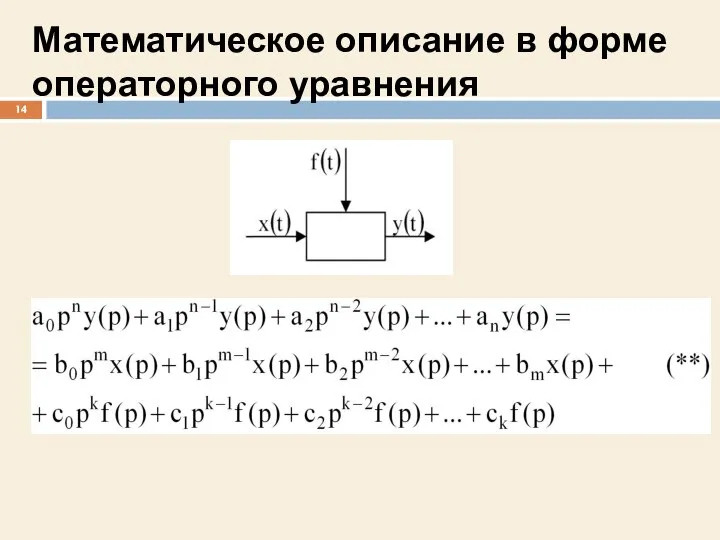
Слайд 14Математическое описание в форме операторного уравнения
Математическое описание в форме операторного уравнения
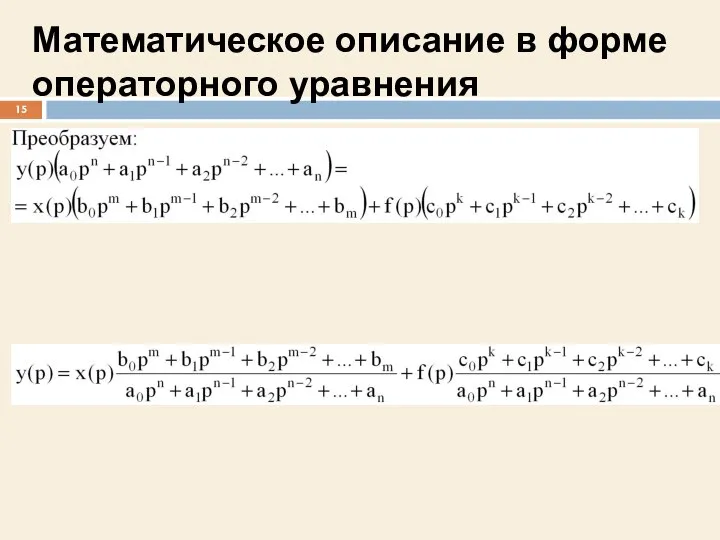
Слайд 15Математическое описание в форме операторного уравнения
Математическое описание в форме операторного уравнения
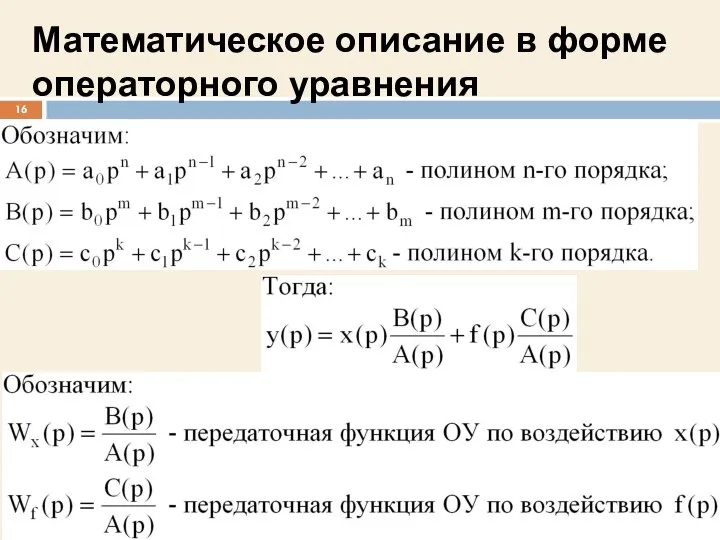
Слайд 16Математическое описание в форме операторного уравнения
Математическое описание в форме операторного уравнения
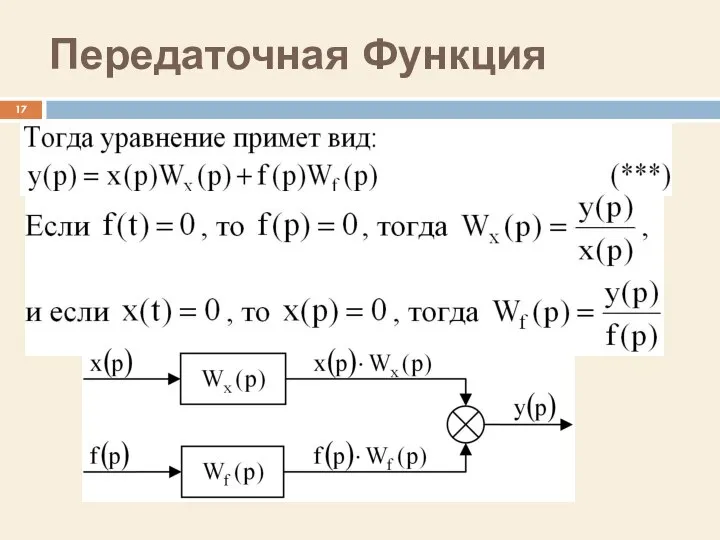
Слайд 17Передаточная Функция
Передаточная Функция
Слайд 18Передаточная функция
Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу, представленное
Передаточная функция
Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу, представленное
Слайд 19Звено однонаправленного действия
Звено однонаправленного действия
Слайд 20Передаточная Функция
Передаточная Функция
Слайд 21Основные способы включения звеньев в структурные схемы
Общий вид линейного звена с 2
Основные способы включения звеньев в структурные схемы
Общий вид линейного звена с 2
Слайд 22Основные способы включения звеньев в структурные схемы
Инверсный вход (вычитание из входного
Основные способы включения звеньев в структурные схемы
Инверсный вход (вычитание из входного
Слайд 23Основные способы соединения
1)Последовательное
2)Параллельное
3)Соединение с обратной связью
Основные способы соединения
1)Последовательное
2)Параллельное
3)Соединение с обратной связью
Слайд 24Последовательное соединение
1) Выход предыдущего звена, является входом последующего.
G(t)
W1
W2
W3
Последовательное соединение
1) Выход предыдущего звена, является входом последующего.
G(t)
W1
W2
W3
Слайд 25Последовательное соединение звеньев
Последовательное соединение звеньев
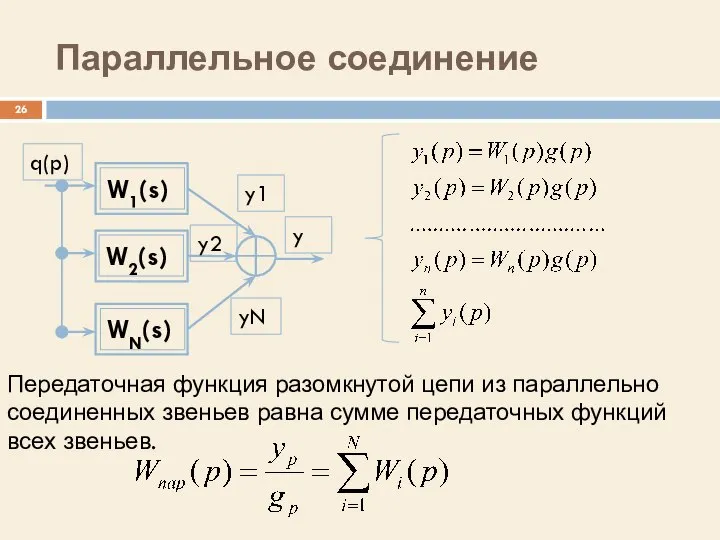
Слайд 26Параллельное соединение
Передаточная функция разомкнутой цепи из параллельно соединенных звеньев равна сумме передаточных
Параллельное соединение
Передаточная функция разомкнутой цепи из параллельно соединенных звеньев равна сумме передаточных
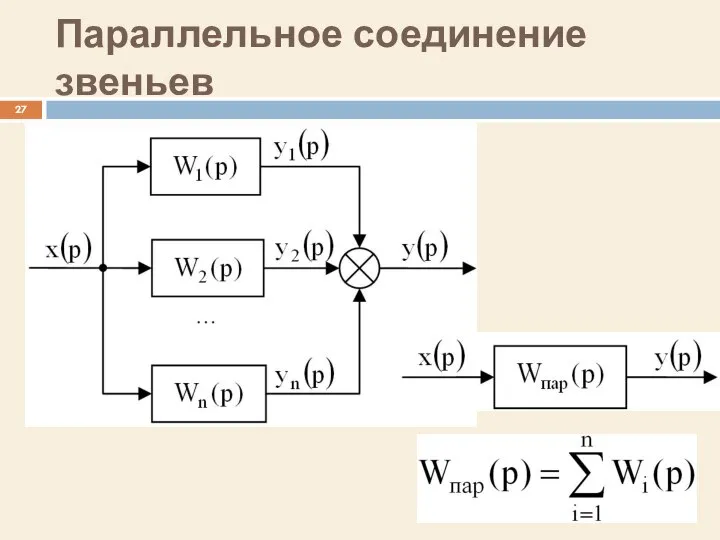
Слайд 27Параллельное соединение звеньев
Параллельное соединение звеньев
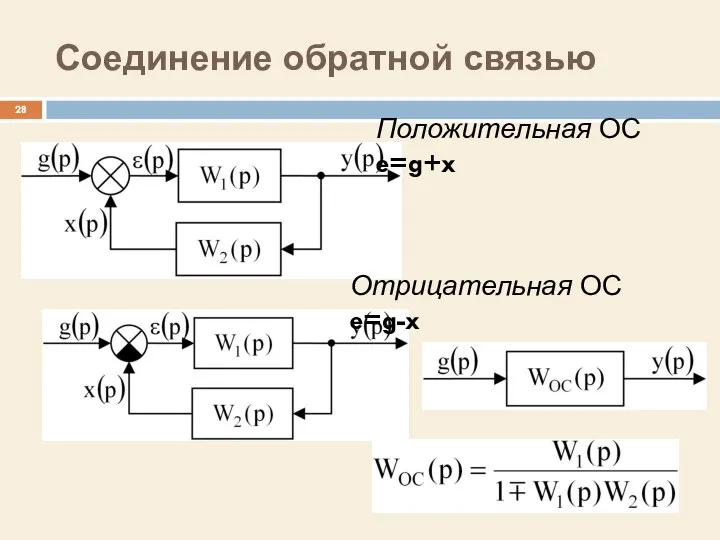
Слайд 28Соединение обратной связью
Положительная ОС e=g+x
Отрицательная ОС e=g-x
Соединение обратной связью
Положительная ОС e=g+x
Отрицательная ОС e=g-x
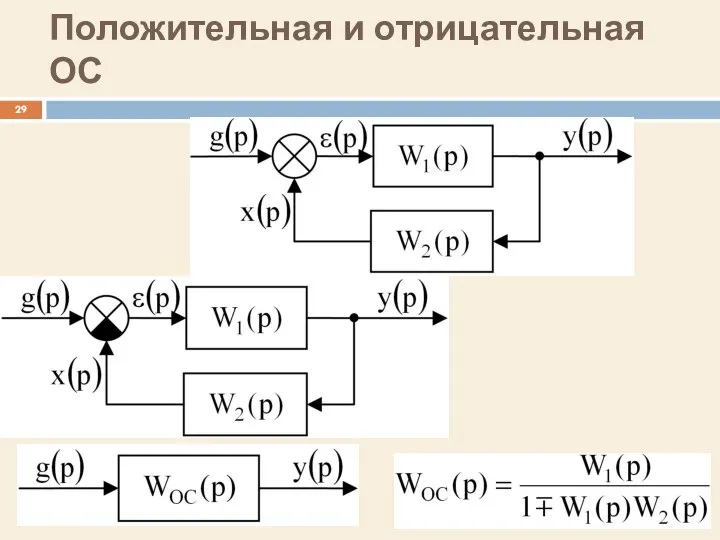
Слайд 29Положительная и отрицательная ОС
Положительная и отрицательная ОС
Слайд 30Положительная и отрицательная единичная Обратная Связь
Положительная и отрицательная единичная Обратная Связь

Слайд 31Линия связи и узел
Линия связи и узел
Слайд 32Сумматор
Сумматор
Слайд 33Элемент сравнения
Элемент сравнения
Слайд 341. Объединение сумматоров:
1. Объединение сумматоров:
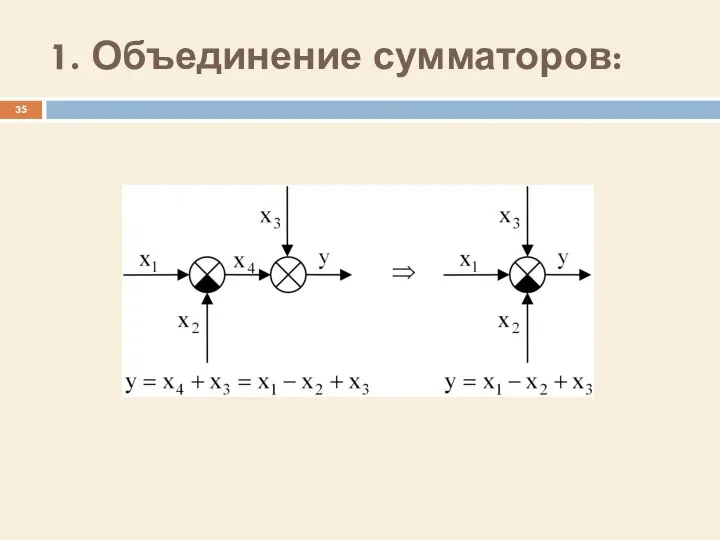
Слайд 351. Объединение сумматоров:
1. Объединение сумматоров:
Слайд 362. Перенос сумматора через звено
2. Перенос сумматора через звено
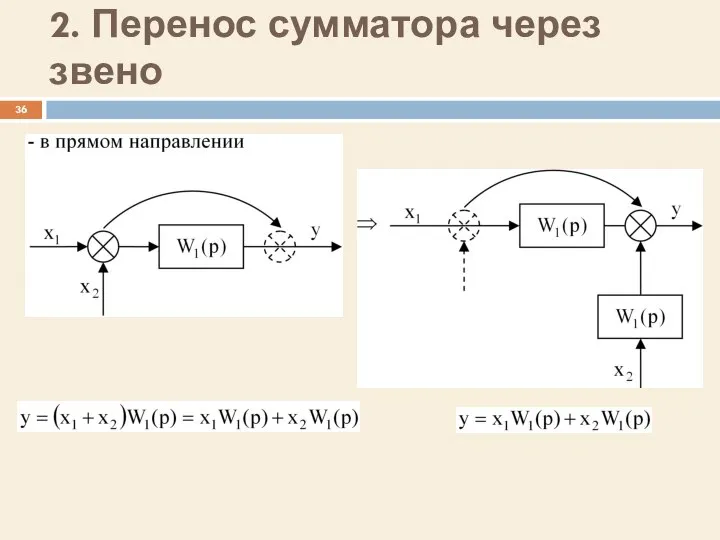
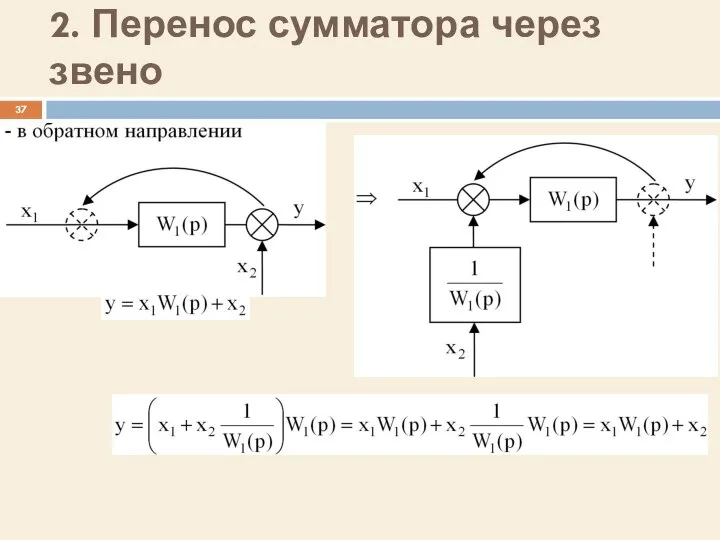
Слайд 372. Перенос сумматора через звено
2. Перенос сумматора через звено
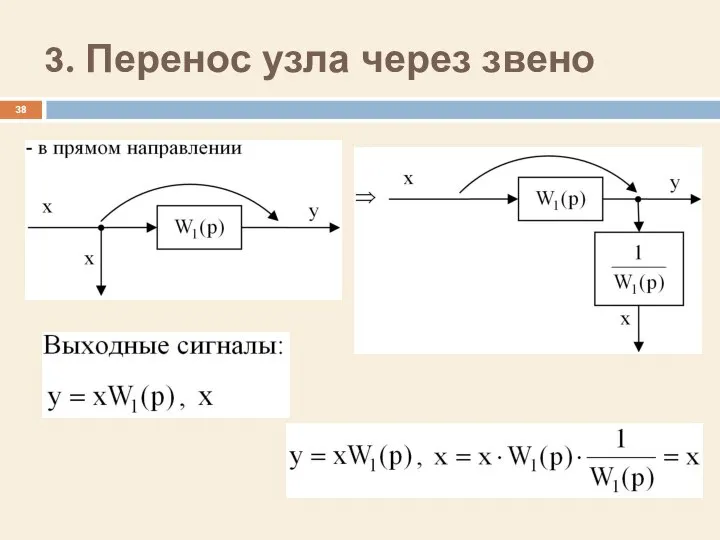
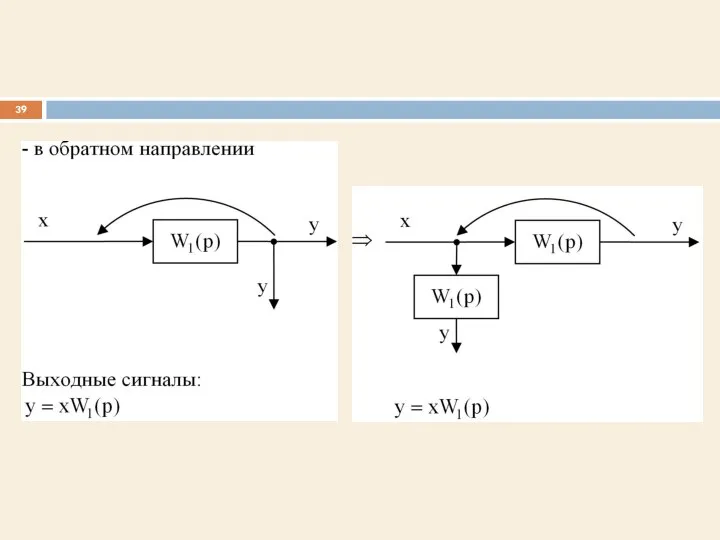
Слайд 383. Перенос узла через звено
3. Перенос узла через звено
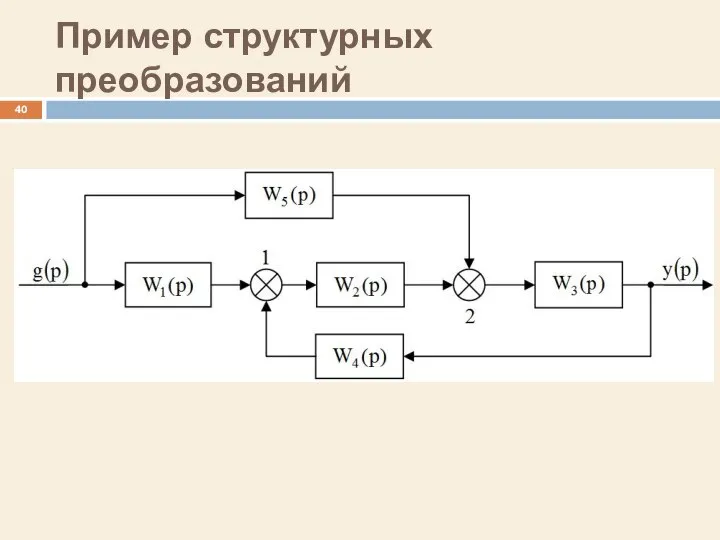
Слайд 40Пример структурных преобразований
Пример структурных преобразований
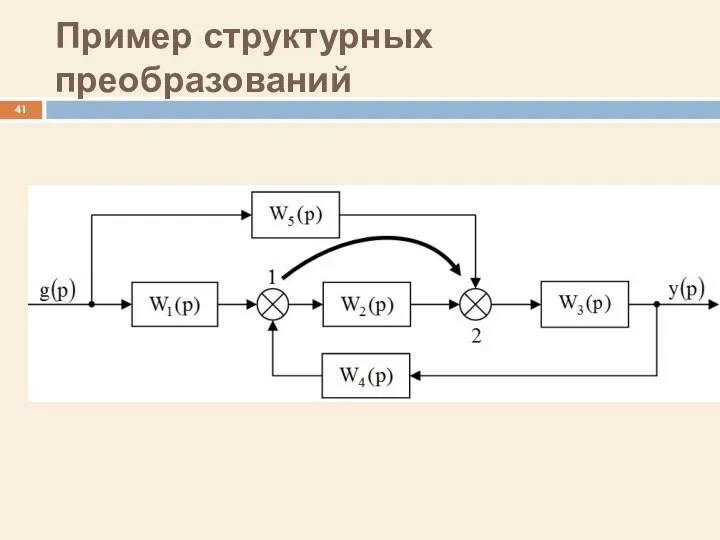
Слайд 41Пример структурных преобразований
Пример структурных преобразований
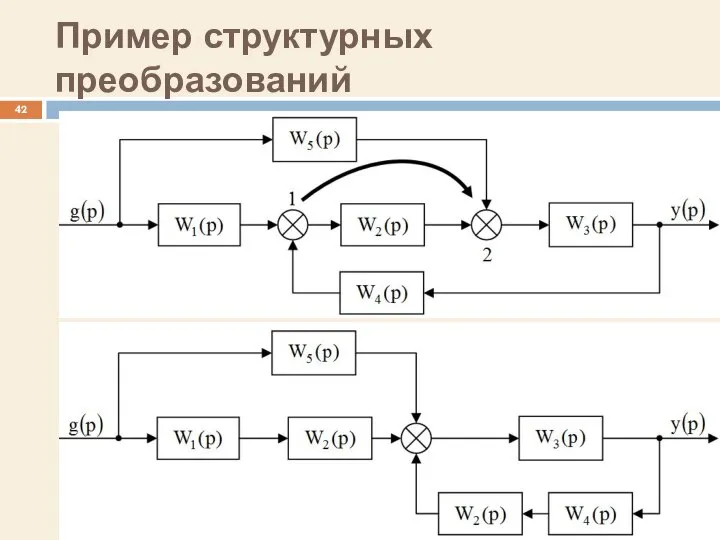
Слайд 42Пример структурных преобразований
Пример структурных преобразований
Слайд 43Пример структурных преобразований
Пример структурных преобразований
Слайд 44Пример структурных преобразований
Пример структурных преобразований
Слайд 45Пример структурных преобразований
Пример структурных преобразований
Слайд 46
Преобразование объекта управления
Перенесем
сумматор S1
через звено W2(p),
сумматоры S2, S3
в
Преобразование объекта управления
Перенесем
сумматор S1
через звено W2(p),
сумматоры S2, S3
в
Слайд 47Преобразование объекта управления
3)Перенесем сумматор через звено в прямом направлении.
W5(p)+W1(p)∙W2(p)
u(t)
y(t)
2)Упростим типовые
Преобразование объекта управления
3)Перенесем сумматор через звено в прямом направлении.
W5(p)+W1(p)∙W2(p)
u(t)
y(t)
2)Упростим типовые

 Интерактивный квест Спасение эйленов
Интерактивный квест Спасение эйленов ОФБУ как форма управления активами
ОФБУ как форма управления активами Педагогические колледжи Красноярского края
Педагогические колледжи Красноярского края Осторожно огонь
Осторожно огонь Требования, предъявляемые к лицам, назначаемым на должности прокуроров
Требования, предъявляемые к лицам, назначаемым на должности прокуроров А. Куприн «Слон»
А. Куприн «Слон» Что изменилось в отчетности за 9 месяцев: Декларация по НДС и прослеживаемость товаров
Что изменилось в отчетности за 9 месяцев: Декларация по НДС и прослеживаемость товаров Презентация на тему Вред здоровью человека от сотового телефона
Презентация на тему Вред здоровью человека от сотового телефона  «Роль игры в развитии речи дошкольника»
«Роль игры в развитии речи дошкольника» Спорт среди молодежи в Красноярске
Спорт среди молодежи в Красноярске Лувр
Лувр Государственная поддержка субъектов предпринимательства в Республике Казахстан со стороны АО «Фонд «Даму»
Государственная поддержка субъектов предпринимательства в Республике Казахстан со стороны АО «Фонд «Даму» Моделирование при разработке управленческих решений. Разработка управленческого решения
Моделирование при разработке управленческих решений. Разработка управленческого решения Как на самом деле любить детей. «Именно любовь делает человека таким, каким он должен быть.» Подготовила воспитатель Кори
Как на самом деле любить детей. «Именно любовь делает человека таким, каким он должен быть.» Подготовила воспитатель Кори Страницы истории
Страницы истории  Презентация на тему Петр 1
Презентация на тему Петр 1  5S: Сортировка. Систематизация. Сияние. Стандартизация. Самосовершенствование
5S: Сортировка. Систематизация. Сияние. Стандартизация. Самосовершенствование Использование современных образовательных технологий в процессе обучения русскому языку
Использование современных образовательных технологий в процессе обучения русскому языку Медведев Егор Бийск ОПШ 2022 (1) (1)
Медведев Егор Бийск ОПШ 2022 (1) (1) Россия выбирает президента
Россия выбирает президента Изображение головы человека в пространстве
Изображение головы человека в пространстве Искусство раннего Возрождения
Искусство раннего Возрождения Проверка домашнего задания
Проверка домашнего задания Новая сказка про Красную Шапочку
Новая сказка про Красную Шапочку Танковая навигационная аппаратура
Танковая навигационная аппаратура Social and personality development and types of play pre-school years
Social and personality development and types of play pre-school years  Презентация на тему ЗУНР Западно-Украинская Народная Республика
Презентация на тему ЗУНР Западно-Украинская Народная Республика  Спин - HIV
Спин - HIV