- Эксплуатация газокомпрессорных станций. Магнитный подвес ротора центробежного нагнетателя

Содержание
- 2. Общая информация Комплект магнитного подвеса (КМП) представляет собой комплекс электромеханических устройств (электромагнитные подшипники, блоки датчиков и
- 3. Предназначение КМП КМП предназначен для удержания ротора нагнетателя в центральном положении в условиях и режимах эксплуатации.
- 4. Преимущество использования КМП Применение КМП в силу отсутствия у него элементов имеющих потенциально ограниченный ресурс и
- 5. Состав КМП один осевой (ОМП) и два радиальных (РМП) электромагнитных подшипника, осуществляющих центрирование ротора нагнетателя; блоки
- 6. Питание КМП Основное питание КМП осуществляется от сети трехфазного переменного тока, с напряжением 380±38 В и
- 7. Конструкция магнитных подшипников Магнитные подшипники состоят из вращающихся (роторных) и неподвижных (статорных) элементов. Вращающиеся части МП
- 8. Радиальный (опорный) магнитный подшипник (РМП) 1 – Статорная часть – электромагнит, состоящий из 8-полюсного пакета листов
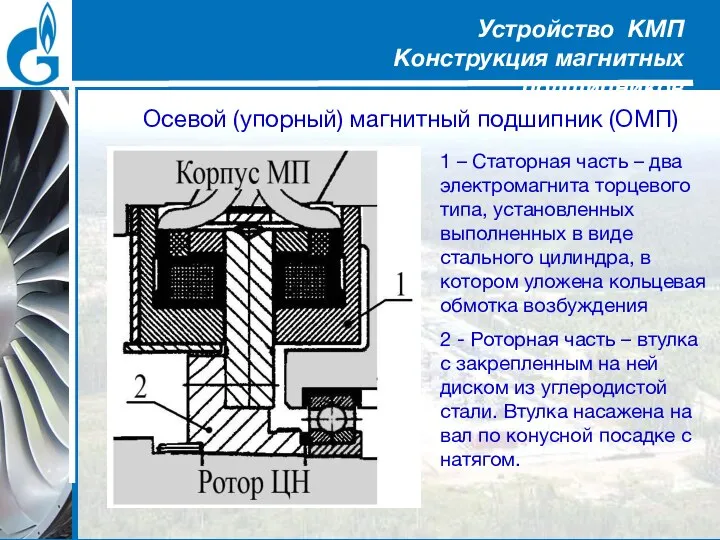
- 9. Осевой (упорный) магнитный подшипник (ОМП) 1 – Статорная часть – два электромагнита торцевого типа, установленных выполненных
- 10. Магнитная опора со стороны привода ЦН 1 - радиальный магнитный подшипник 2 - блок радиальных вихретоковых
- 11. Магнитная опора со свободной стороны ЦН 1 - радиальный магнитный подшипник 2 - блок радиальных дат-чиков
- 12. Принцип работы СУМП Датчики положения ротора вырабатывают сигнал, пропорцио-нальный отклонению ротора от центрального положения. Этот сигнал
- 14. Скачать презентацию
Слайд 2Общая информация
Комплект магнитного подвеса (КМП) представляет собой комплекс электромеханических устройств (электромагнитные подшипники,
Общая информация
Комплект магнитного подвеса (КМП) представляет собой комплекс электромеханических устройств (электромагнитные подшипники,
Слайд 3Предназначение КМП
КМП предназначен для удержания ротора нагнетателя в центральном положении в условиях
Предназначение КМП
КМП предназначен для удержания ротора нагнетателя в центральном положении в условиях
Слайд 4Преимущество использования КМП
Применение КМП в силу отсутствия у него элементов имеющих потенциально
Преимущество использования КМП
Применение КМП в силу отсутствия у него элементов имеющих потенциально
Слайд 5Состав КМП
один осевой (ОМП) и два радиальных (РМП) электромагнитных подшипника, осуществляющих центрирование
Состав КМП
один осевой (ОМП) и два радиальных (РМП) электромагнитных подшипника, осуществляющих центрирование
Слайд 6Питание КМП
Основное питание КМП осуществляется от сети трехфазного переменного тока, с напряжением
Питание КМП
Основное питание КМП осуществляется от сети трехфазного переменного тока, с напряжением
Слайд 7 Конструкция магнитных подшипников
Магнитные подшипники состоят из вращающихся (роторных) и неподвижных
Конструкция магнитных подшипников
Магнитные подшипники состоят из вращающихся (роторных) и неподвижных
Слайд 8Радиальный (опорный) магнитный подшипник (РМП)
1 – Статорная часть – электромагнит, состоящий из
Радиальный (опорный) магнитный подшипник (РМП)
1 – Статорная часть – электромагнит, состоящий из

Слайд 9Осевой (упорный) магнитный подшипник (ОМП)
1 – Статорная часть – два электромагнита торцевого
Осевой (упорный) магнитный подшипник (ОМП)
1 – Статорная часть – два электромагнита торцевого
Слайд 10
Магнитная опора со стороны привода ЦН
1 - радиальный магнитный подшипник
2 -
Магнитная опора со стороны привода ЦН
1 - радиальный магнитный подшипник
2 -

Слайд 11
Магнитная опора со свободной стороны ЦН
1 - радиальный магнитный подшипник
2 -
Магнитная опора со свободной стороны ЦН
1 - радиальный магнитный подшипник
2 -

Слайд 12Принцип работы СУМП
Датчики положения ротора вырабатывают сигнал, пропорцио-нальный отклонению ротора от центрального
Принцип работы СУМП
Датчики положения ротора вырабатывают сигнал, пропорцио-нальный отклонению ротора от центрального
 Строение электронных оболочек атомов
Строение электронных оболочек атомов Физические основы механики. Лекция 1.1
Физические основы механики. Лекция 1.1 Ремонт механической части тормозных механизмов типа ИМТ-9, ИМТ-10 трамвайных вагонов, производства УКВЗ
Ремонт механической части тормозных механизмов типа ИМТ-9, ИМТ-10 трамвайных вагонов, производства УКВЗ Получение электричества с помощью волос
Получение электричества с помощью волос Кроссворды по физике
Кроссворды по физике Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий
Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий Виды движения
Виды движения Презентация на тему Ход лучей в призме и плоскопараллельной пластине
Презентация на тему Ход лучей в призме и плоскопараллельной пластине  Строение атома
Строение атома Гук Роберт (1635 - 1703). Закон Гука
Гук Роберт (1635 - 1703). Закон Гука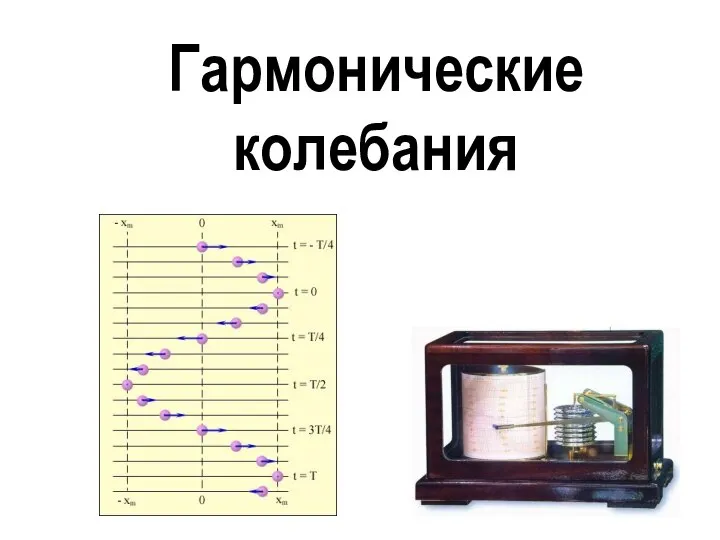 Lektsia_8_Kolebania_ZS
Lektsia_8_Kolebania_ZS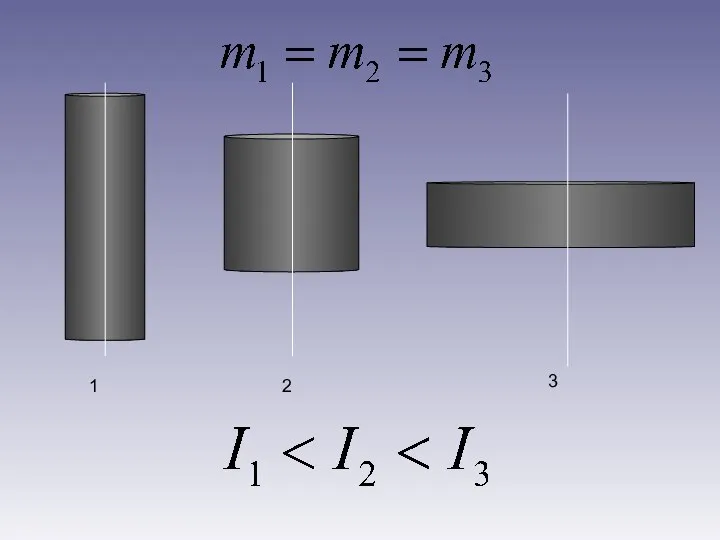 Закон сохранения момента импульса
Закон сохранения момента импульса Уровни описания технических систем
Уровни описания технических систем Типовой расчет №3. Молекулярная физика и термодинамика
Типовой расчет №3. Молекулярная физика и термодинамика Нанотехнологии
Нанотехнологии Обвесы и их влияние
Обвесы и их влияние Машинная игла. Уход за швейной машиной. Устранение дефектов машинной строчки
Машинная игла. Уход за швейной машиной. Устранение дефектов машинной строчки Шумовое загрязнение и его влияние на человека
Шумовое загрязнение и его влияние на человека Презентация на тему Ядерный реактор
Презентация на тему Ядерный реактор  Физические величины и их измерение
Физические величины и их измерение Загадочные явления
Загадочные явления Презентация на тему Удельная теплота плавления
Презентация на тему Удельная теплота плавления  Практическое применение электрического тока на примере электростимуляции растений
Практическое применение электрического тока на примере электростимуляции растений Презентация на тему Первый закон термодинамики
Презентация на тему Первый закон термодинамики  Униполярные двигатели
Униполярные двигатели Перемещение. Что такое перемещение?
Перемещение. Что такое перемещение? Отражение света
Отражение света Исследование зависимости угла преломления от угла падения света
Исследование зависимости угла преломления от угла падения света