- Метод составления уравнений движения гибкого кольца при неголономных ограничениях

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. . К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей динамики механических систем-находит широкое
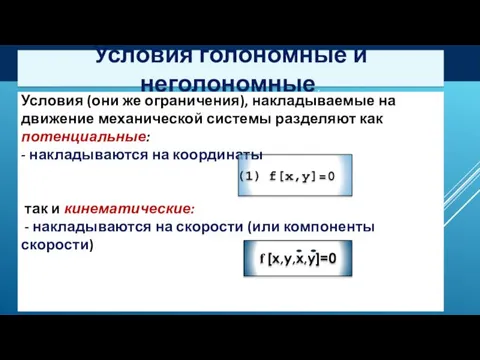
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
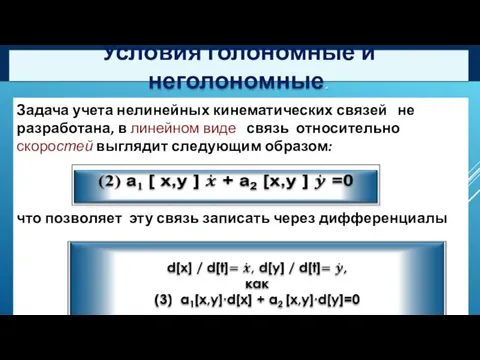
- 6. Условия голономные и неголономные. Задача учета нелинейных кинематических связей не разработана, в линейном виде связь относительно
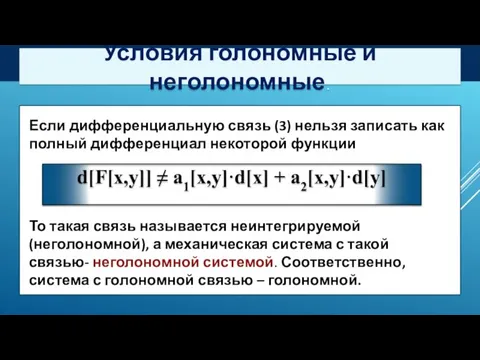
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции То
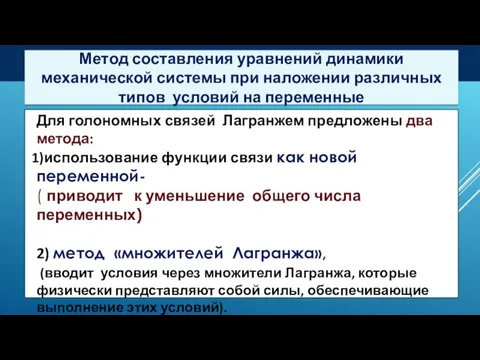
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные Для голономных связей
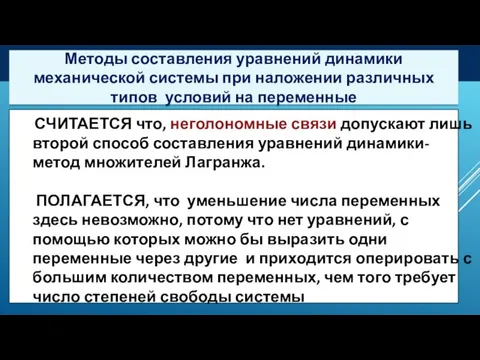
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
- 10. Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные давно предложен А. Пуанкаре и
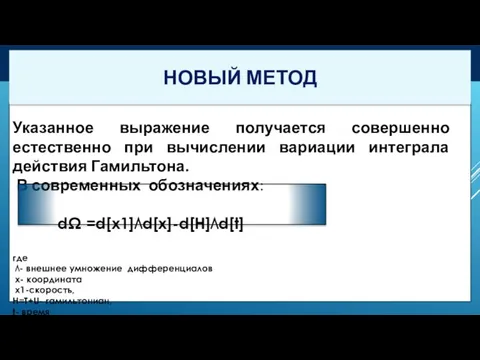
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В случае использования интегрального инварианта механики по Картану, введение ограничений на переменные механической системы (как голономные,
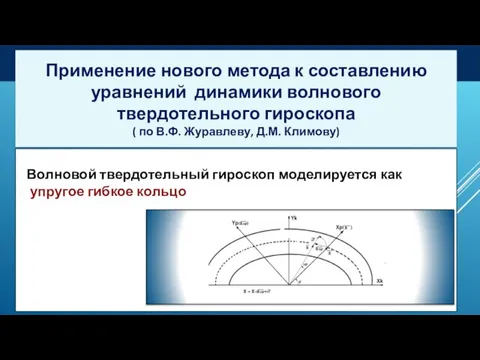
- 14. Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М. Климову)
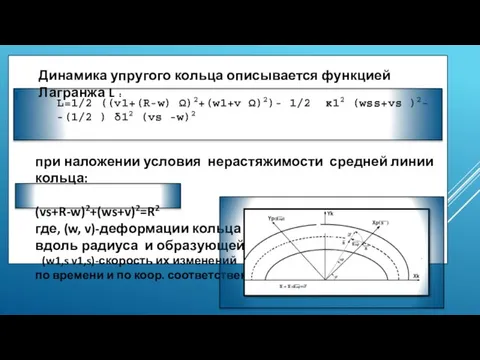
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 при наложении условия
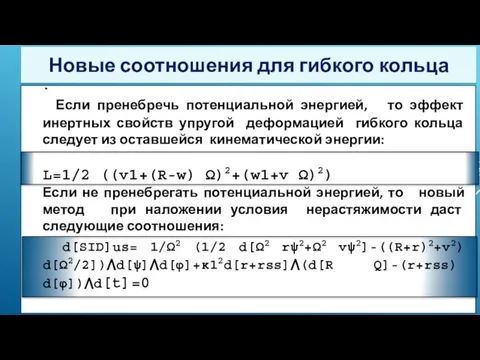
- 16. . Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией гибкого кольца следует из оставшейся
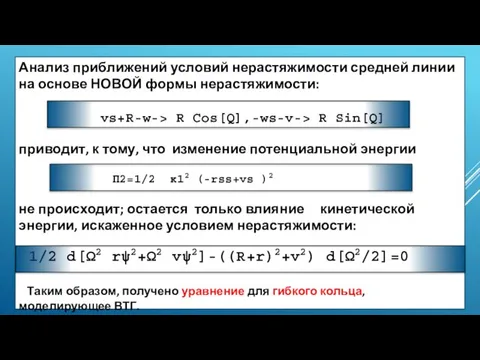
- 17. Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 20. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Картан Э.Д. Интегральные инварианты М.: 1922 г. 2. Суслов Г.К. Теоретическая механика,
- 22. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета нелинейных кинематических связей не разработана, в линейном
Условия голономные и неголономные.
Задача учета нелинейных кинематических связей не разработана, в линейном
Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В случае использования интегрального инварианта механики по Картану, введение ограничений на
В случае использования интегрального инварианта механики по Картану, введение ограничений на
Слайд 14Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
Слайд 17
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/866891/slide-18.jpg)
Слайд 20СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
 Магнитные цепи
Магнитные цепи Построение изображений в линзах
Построение изображений в линзах Сила трения
Сила трения Механические колебания и волны. Звук
Механические колебания и волны. Звук Презентация на тему Атмосферное давление: тест
Презентация на тему Атмосферное давление: тест  Презентация на тему Последовательное и параллельное соединения проводников
Презентация на тему Последовательное и параллельное соединения проводников  Вечный двигатель в истории
Вечный двигатель в истории Геостационарные спутники
Геостационарные спутники Проект: Кошкина радость
Проект: Кошкина радость Гармонические колебания
Гармонические колебания Измерение жесткости пружины
Измерение жесткости пружины Мирный ли атом?
Мирный ли атом? Оборудование для ремонта бытовых электроприборов
Оборудование для ремонта бытовых электроприборов Дифракция света на многослойных неоднородных голографических ФПМ-ЖК дифракционных структурах
Дифракция света на многослойных неоднородных голографических ФПМ-ЖК дифракционных структурах Теоретическая механика. Кинематика. Движение твердой среды
Теоретическая механика. Кинематика. Движение твердой среды Силовое действие магнитного поля
Силовое действие магнитного поля Физико-техническое объединение Эврика
Физико-техническое объединение Эврика Проектирование исследования
Проектирование исследования Расчёт пути и времени движения
Расчёт пути и времени движения Устройства ввода информации
Устройства ввода информации Явление электромагнитной индукции
Явление электромагнитной индукции Электрическая цепь и её составные части
Электрическая цепь и её составные части Приборы для измерения температуры
Приборы для измерения температуры Трансформатор в линейном режиме
Трансформатор в линейном режиме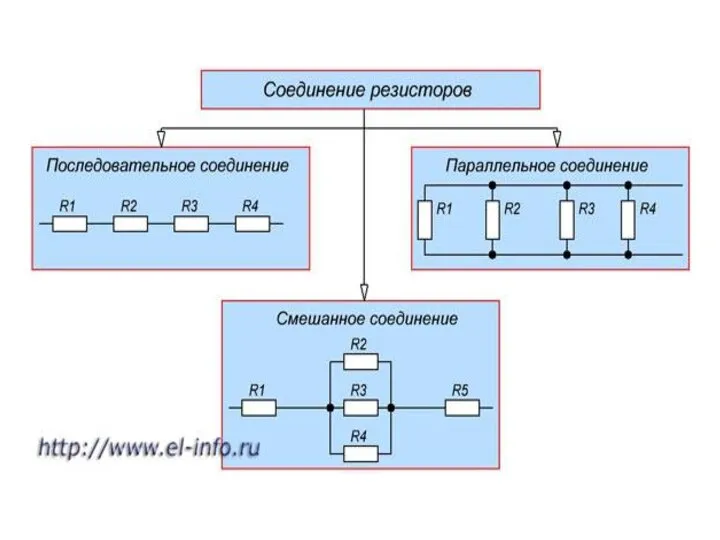 Соединения резисторов
Соединения резисторов Отражение света. Закон отражения света
Отражение света. Закон отражения света Электротехника и Электроника
Электротехника и Электроника Радіолокація. Радіомовлення і телебачення. Супутникове телебачення. 11 клас
Радіолокація. Радіомовлення і телебачення. Супутникове телебачення. 11 клас