- Якісна теорія динамічних систем. Моделювання динамічних систем Атрактори. Лекція 7

Содержание
- 2. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Регулярні атрактори. Точка тяжіння ( N ≥
- 3. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Нелінійні системи. З фізичної точки зору зростання
- 4. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Автоколивання. Практично важливий клас нелінійних коливань утворюють
- 5. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем хАос і ХаОс Хаотична динаміка розвивається в
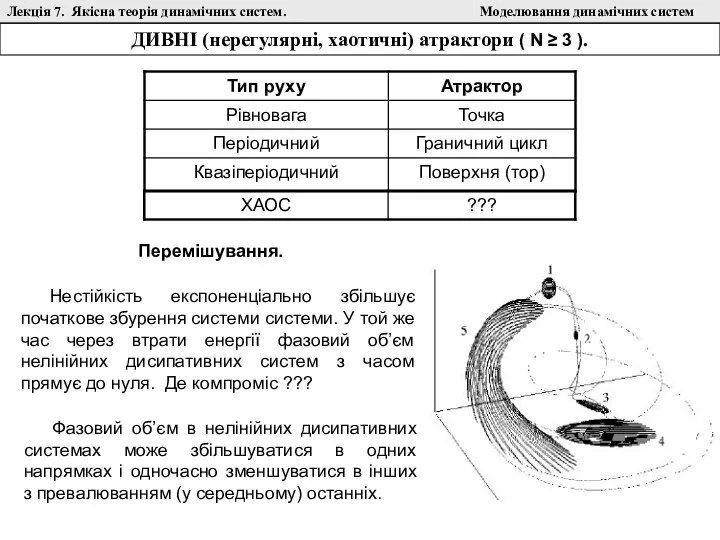
- 6. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем ДИВНІ (нерегулярні, хаотичні) атрактори ( N ≥
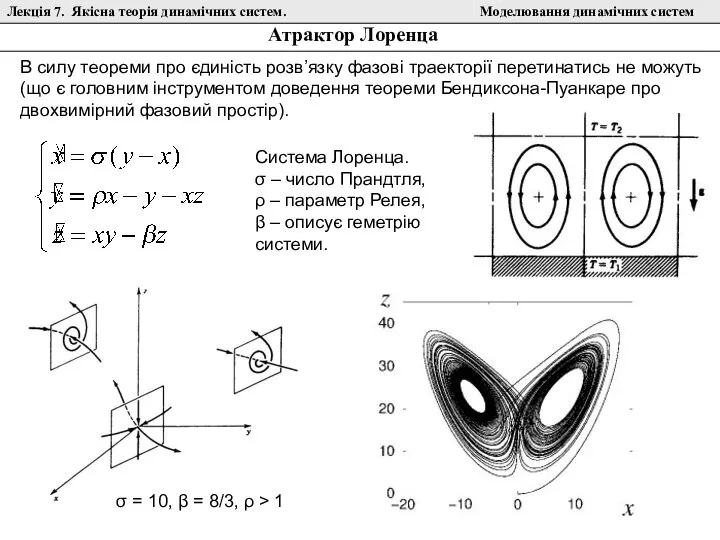
- 7. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем σ = 10, β = 8/3, ρ
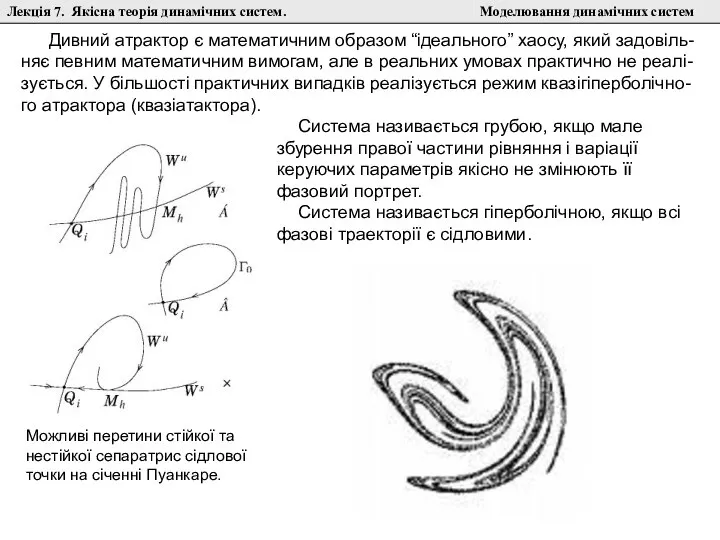
- 8. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Дивний атрактор є математичним образом “ідеального” хаосу,
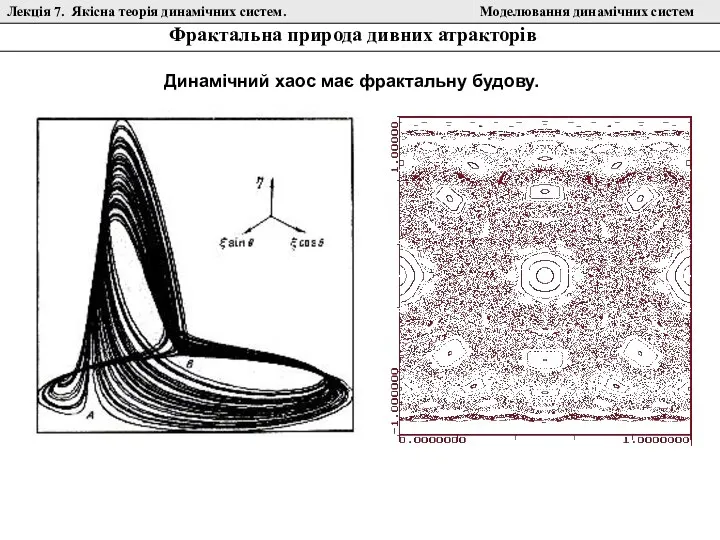
- 9. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Фрактальна природа дивних атракторів Динамічний хаос має
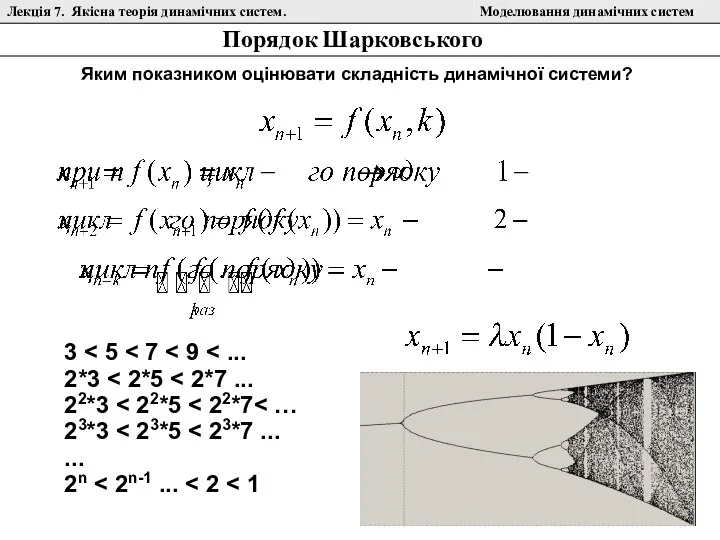
- 10. Лекція 7. Якісна теорія динамічних систем. Моделювання динамічних систем Порядок Шарковського Яким показником оцінювати складність динамічної
- 12. Скачать презентацию
Слайд 2Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
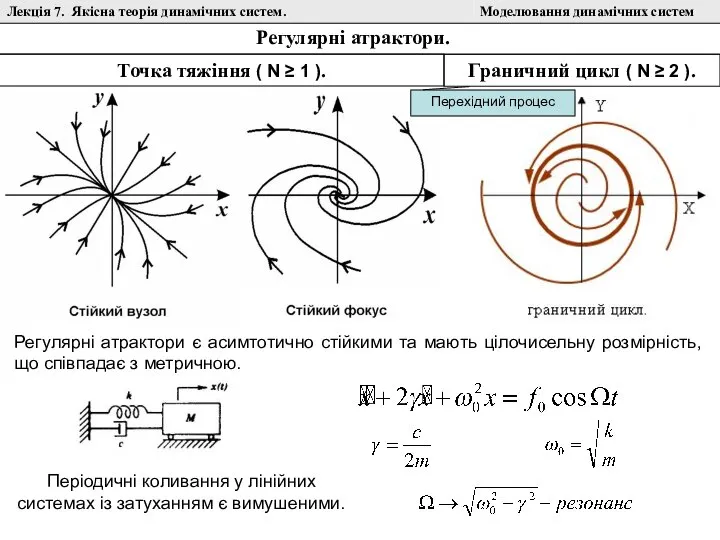
Регулярні атрактори.
Точка тяжіння ( N
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Регулярні атрактори.
Точка тяжіння ( N
Слайд 3Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Нелінійні системи.
З фізичної точки зору
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Нелінійні системи.
З фізичної точки зору
Слайд 4Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
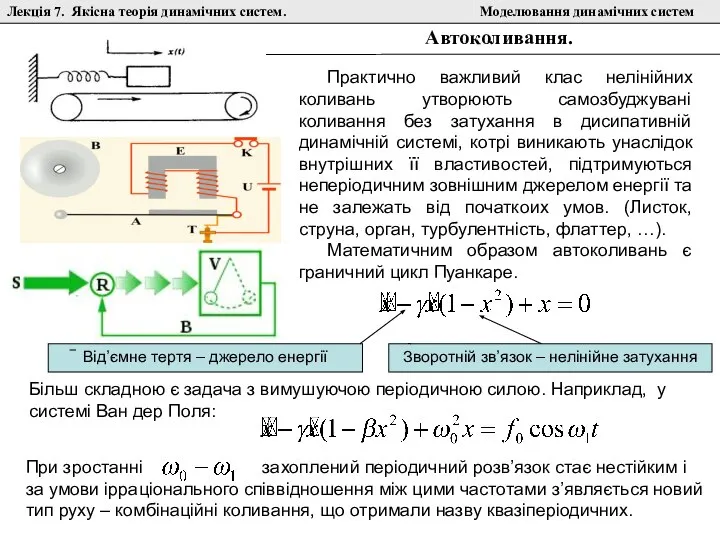
Автоколивання.
Практично важливий клас нелінійних коливань
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Автоколивання.
Практично важливий клас нелінійних коливань
Слайд 5Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
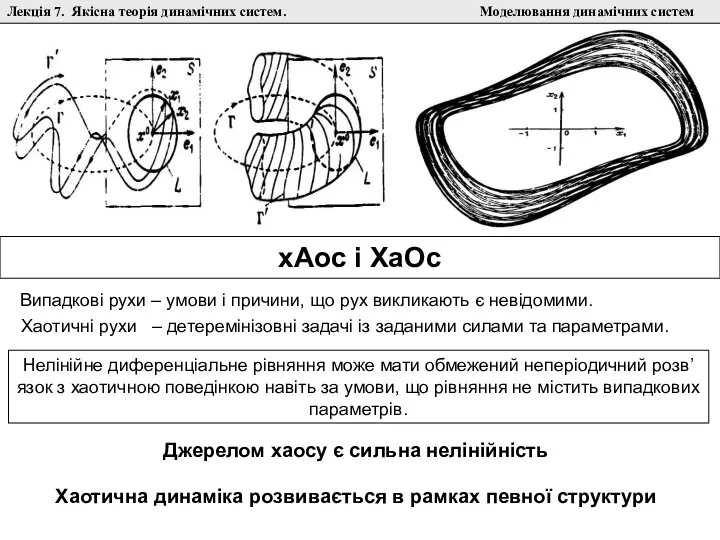
хАос і ХаОс
Хаотична динаміка
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
хАос і ХаОс
Хаотична динаміка
Слайд 6Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
ДИВНІ (нерегулярні, хаотичні) атрактори (
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
ДИВНІ (нерегулярні, хаотичні) атрактори (
Слайд 7Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
σ = 10, β =
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
σ = 10, β =
Слайд 8Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Дивний атрактор є математичним образом
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Дивний атрактор є математичним образом
Слайд 9Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Фрактальна природа дивних атракторів
Динамічний
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Фрактальна природа дивних атракторів
Динамічний
Слайд 10Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Порядок Шарковського
Яким показником оцінювати
Лекція 7. Якісна теорія динамічних систем.
Моделювання динамічних систем
Порядок Шарковського
Яким показником оцінювати
 OVZ_Zanyatie_3
OVZ_Zanyatie_3 Презентация на тему Механические колебания
Презентация на тему Механические колебания  Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Ускорение. Свободное падение. Криволинейное движение. Угловая скорость
Ускорение. Свободное падение. Криволинейное движение. Угловая скорость Полезные свойства кавитации
Полезные свойства кавитации Современное состояние прецизионной кварцевой стабилизации частоты применительно к задачам частотно-временного обеспечения
Современное состояние прецизионной кварцевой стабилизации частоты применительно к задачам частотно-временного обеспечения Время и его измерение. Основы кинематики
Время и его измерение. Основы кинематики Изменения в технике 2021 модельного года
Изменения в технике 2021 модельного года Две дельта - функционные ямы в импульсном представлении
Две дельта - функционные ямы в импульсном представлении Схемный анализ ОЭП
Схемный анализ ОЭП Категории и разновидности оборудования для взвешивания зерна и плодоовощной продукции
Категории и разновидности оборудования для взвешивания зерна и плодоовощной продукции Теоретические основы электротехники. Индуктивно связанные электрические цепи. Лекция 6
Теоретические основы электротехники. Индуктивно связанные электрические цепи. Лекция 6 Механическое движение
Механическое движение Решение качественных и расчетных задач по физике
Решение качественных и расчетных задач по физике Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость
Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость Механическое движение. 6 класс
Механическое движение. 6 класс Устройство для наматывания нижней нити на шпульку
Устройство для наматывания нижней нити на шпульку Объект и его свойства (тест)
Объект и его свойства (тест) Расчет магнитной цепи
Расчет магнитной цепи brounovskoe_dvizhenie
brounovskoe_dvizhenie Звук. Колебательные системы
Звук. Колебательные системы Технические данные оборудования, подлежащего реализации
Технические данные оборудования, подлежащего реализации Координационная химия и солнечная энергетика
Координационная химия и солнечная энергетика Поступательное и вращательное движения
Поступательное и вращательное движения Расчет пусковых резисторов для электродвигателей постоянного тока
Расчет пусковых резисторов для электродвигателей постоянного тока Инерциальные системы отсчета. Первый закон Ньютона
Инерциальные системы отсчета. Первый закон Ньютона Л3.7. Электротехнические материалы
Л3.7. Электротехнические материалы Физический диктант по теме: Механические колебания
Физический диктант по теме: Механические колебания