- Детали. Варианты соединения балок

Содержание
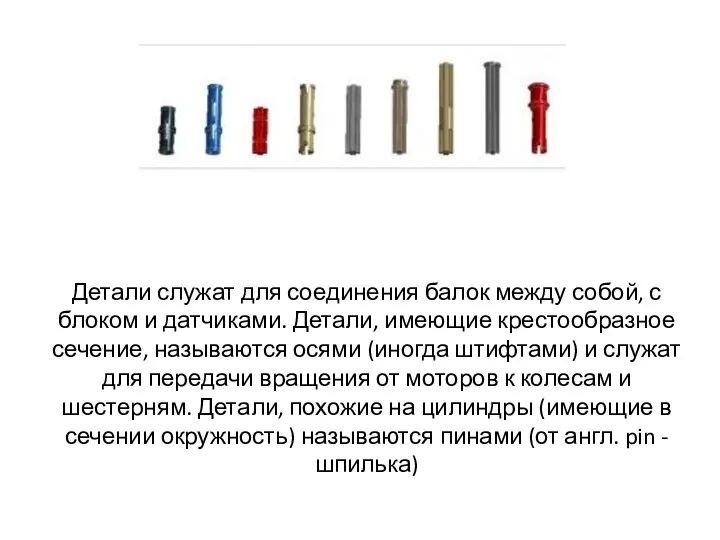
- 2. Детали служат для соединения балок между собой, с блоком и датчиками. Детали, имеющие крестообразное сечение, называются
- 3. Варианты соединения балок
- 4. Коннекторы. Их главная задача - соединение балок в различных плоскостях, изменение угла соединения деталей и подсоединение
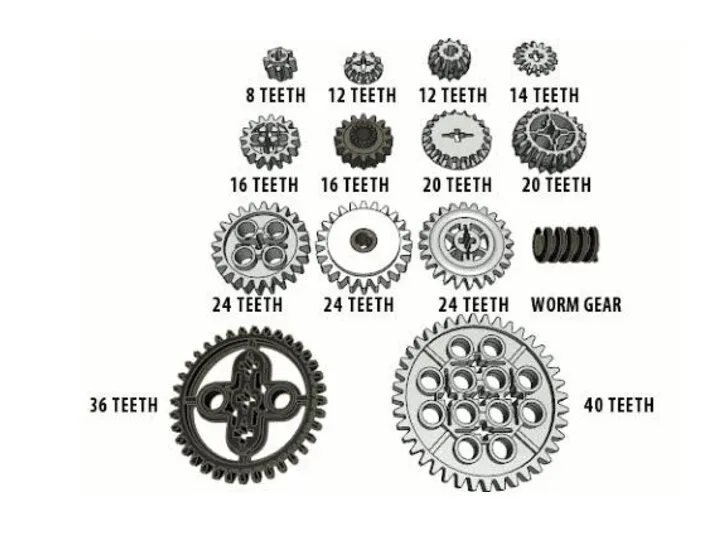
- 5. Шестерни Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции робота. Как правило, это
- 7. Колеса и гусеницы
- 9. Наш первый робот - тележка Два больших мотора, для того чтобы мы смогли научить нашего робота
- 10. Инструкция
- 11. Инструкция
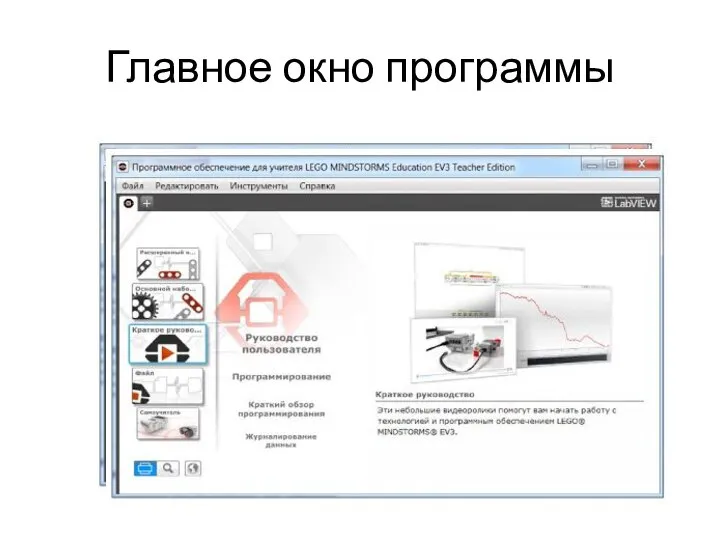
- 12. Главное окно программы
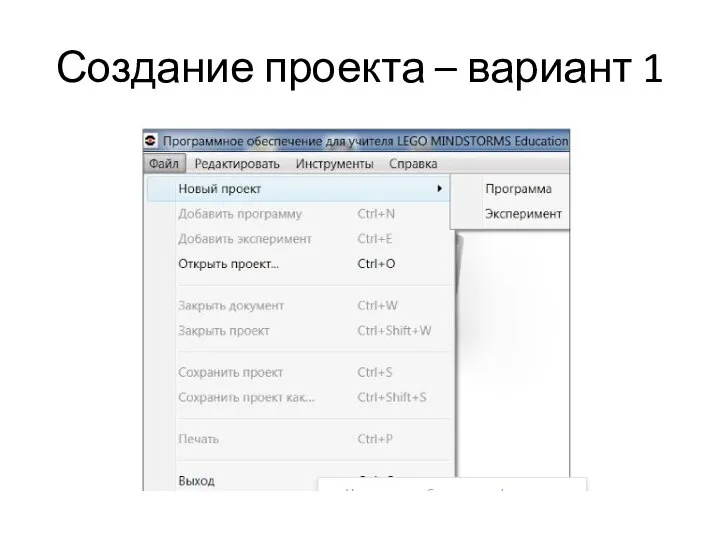
- 14. Создание проекта – вариант 1
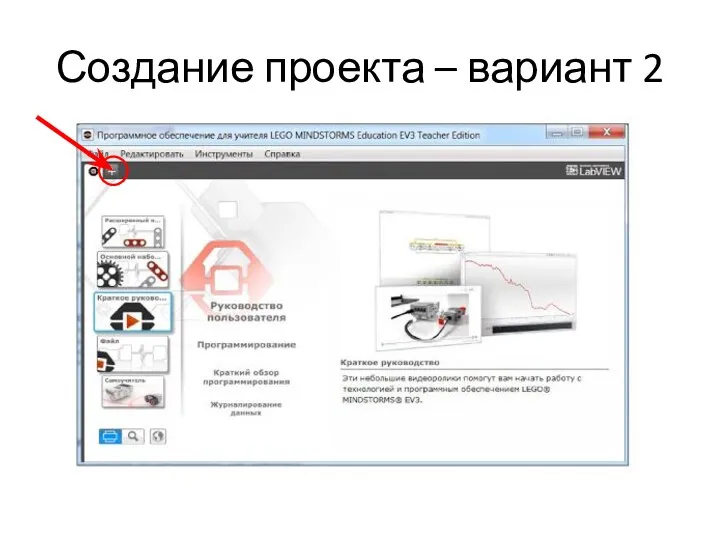
- 15. Создание проекта – вариант 2
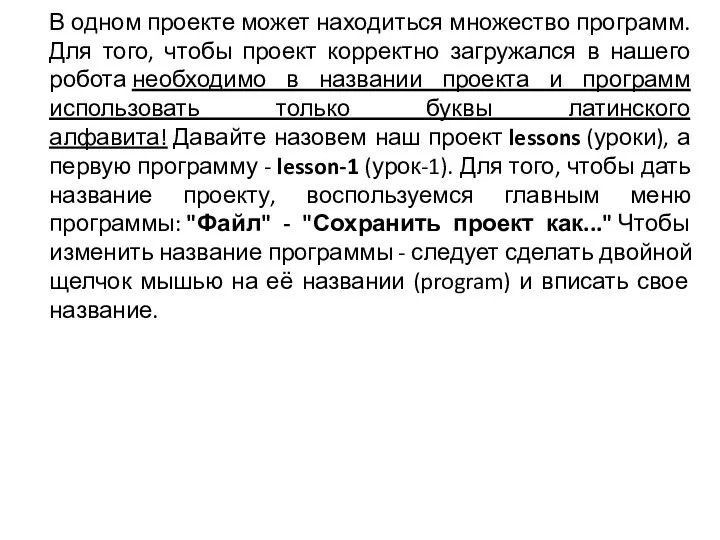
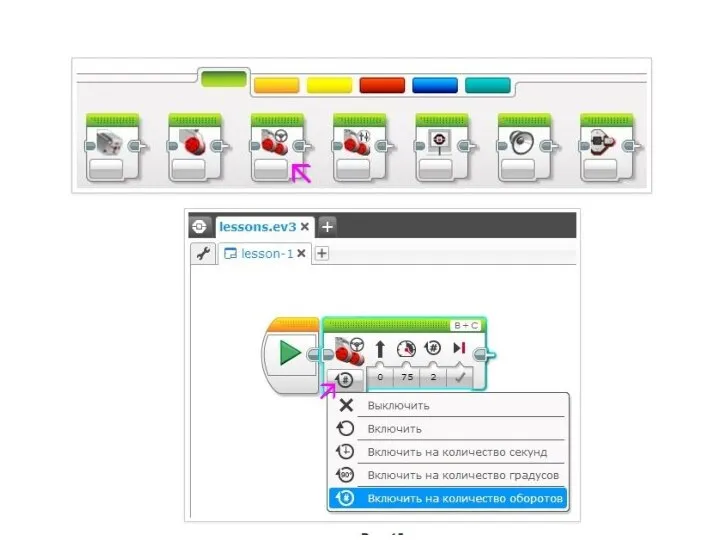
- 16. В одном проекте может находиться множество программ. Для того, чтобы проект корректно загружался в нашего робота
- 17. Подключаем робот к компьютеру
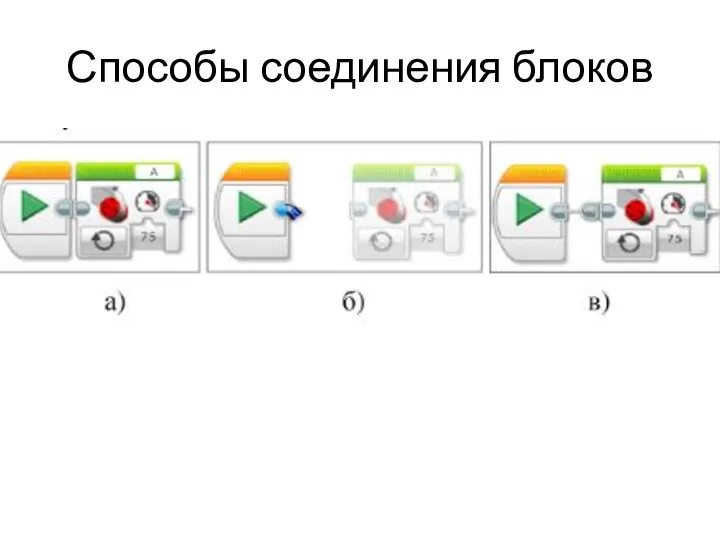
- 19. Способы соединения блоков
- 20. Блок EV3 имеет 4 порта, обозначенных цифрами: 1, 2, 3, и 4. Эти порты служат для
- 22. Скачать презентацию
Слайд 3Варианты соединения балок
Варианты соединения балок

Слайд 4Коннекторы.
Их главная задача - соединение балок в различных плоскостях, изменение угла соединения
Коннекторы. Их главная задача - соединение балок в различных плоскостях, изменение угла соединения

Слайд 5Шестерни
Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции робота.
Шестерни
Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции робота.

Слайд 7Колеса и гусеницы
Колеса и гусеницы

Слайд 9Наш первый робот - тележка
Два больших мотора, для того чтобы мы смогли
Наш первый робот - тележка
Два больших мотора, для того чтобы мы смогли
Слайд 10Инструкция
Инструкция

Слайд 11Инструкция
Инструкция

Слайд 12Главное окно программы
Главное окно программы
Слайд 14Создание проекта – вариант 1
Создание проекта – вариант 1
Слайд 15Создание проекта – вариант 2
Создание проекта – вариант 2
Слайд 16В одном проекте может находиться множество программ. Для того, чтобы проект корректно
В одном проекте может находиться множество программ. Для того, чтобы проект корректно
Слайд 17Подключаем робот к компьютеру
Подключаем робот к компьютеру

Слайд 19Способы соединения блоков
Способы соединения блоков
Слайд 20Блок EV3 имеет 4 порта, обозначенных цифрами: 1, 2, 3, и 4. Эти порты служат для подключения только датчиков. Для
Блок EV3 имеет 4 порта, обозначенных цифрами: 1, 2, 3, и 4. Эти порты служат для подключения только датчиков. Для
 Методические аспекты эволюции информационных технологий. NBICS-конвергенция
Методические аспекты эволюции информационных технологий. NBICS-конвергенция PHP. Доступ к базам данных
PHP. Доступ к базам данных Web of science. Символы усечения
Web of science. Символы усечения Искусственные и естественные источники информации
Искусственные и естественные источники информации 17 протокол маршрутизации
17 протокол маршрутизации BMWSTART (1)
BMWSTART (1) Быть в 10 раз эффективнее благодаря Groovy
Быть в 10 раз эффективнее благодаря Groovy Базы данных. Access 2007. Запросы
Базы данных. Access 2007. Запросы Браузер Google Chrome
Браузер Google Chrome Insignia. Исследование
Insignia. Исследование Что такое компьютер?
Что такое компьютер? Вложенные циклы и двумерные массивы
Вложенные циклы и двумерные массивы Объекты мультимедиа
Объекты мультимедиа Информационная культура современного человека 11 класс
Информационная культура современного человека 11 класс Признаки объектов
Признаки объектов Операционные системы
Операционные системы Основы программирования C++
Основы программирования C++ Разработка веб-ориентированного специализированного табличного редактора
Разработка веб-ориентированного специализированного табличного редактора Adobe Photoshop
Adobe Photoshop Проектирование,информационное моделирование (bim) и визуализация гражданских и промышленных зданий
Проектирование,информационное моделирование (bim) и визуализация гражданских и промышленных зданий Сеть широкополосного мобильного доступа стандарта LTE для города Сызрань
Сеть широкополосного мобильного доступа стандарта LTE для города Сызрань Разработка и реализация алгоритма создания и балансировки двоичного дерева поиска со взвешенными узлами
Разработка и реализация алгоритма создания и балансировки двоичного дерева поиска со взвешенными узлами Введение в логику
Введение в логику Проектирование объектно – ориентированного приложения. Создание интерфейса пользователя
Проектирование объектно – ориентированного приложения. Создание интерфейса пользователя Персональный компьютер
Персональный компьютер Представление научных результатов
Представление научных результатов Двоичный поиск в упорядоченном массиве
Двоичный поиск в упорядоченном массиве Objektorientierte Programmierung
Objektorientierte Programmierung