- Классификация систем автоматического управления и принципы управления. Лекция 2

Содержание
- 2. Фундаментальные принципы управления ! Принцип автоматического регулирования определяет, как и на основе какой информации формируется управляющее
- 3. Принцип разомкнутого управления УУ-устройство управления; ОУ-объект управления yз(t) – входящий сигнал, задает алгоритм функционирования. u(t) –
- 4. Принцип регулирования по возмущению (компенсации) из различных возмущений, действующих в системе, выбирается одно главное, на которое
- 5. Принцип регулирования по отклонению Достоинства: 1) Уменьшает отклонение регулируемой величины не зависимо от факторов, вызвавших это
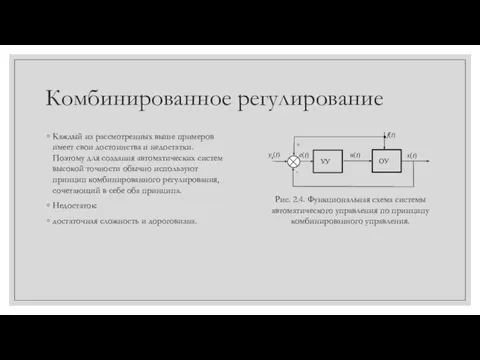
- 6. Комбинированное регулирование Каждый из рассмотренных выше примеров имеет свои достоинства и недостатки. Поэтому для создания автоматических
- 7. Принцип адаптации Принципы адаптации (приспособление) используется в самонастраивающихся САУ. Особенностью их является то, что они автоматически
- 8. Классификация систем автоматического управления А. По принципу действия: разомкнутые; замкнутые (с обратной связью); комбинированные (сочетают регулирование
- 9. Классификация систем автоматического управления Б. По цели управления: 1) системы автоматического регулирования (САР) – цель управления
- 10. Классификация систем автоматического управления Б. По цели управления: 2) САУ других типов (обычно более сложные), например:
- 11. Классификация систем автоматического управления В. По классу уравнений, описывающих систему: 1) линейные и нелинейные САУ; в
- 12. Классификация систем автоматического управления Г. По характеру преобразования переменных в элементах системы: 1) непрерывные системы –
- 13. Классификация систем автоматического управления Д. По характеру процессов в системе: Детерминированные и стохастические САУ (определенные и
- 14. Классификация систем автоматического управления Е. По числу входных (задающих) и выходных (управляемых) переменных: одномерные (с одним
- 16. Скачать презентацию
Слайд 2Фундаментальные принципы управления
! Принцип автоматического регулирования определяет, как и на основе какой
Фундаментальные принципы управления
! Принцип автоматического регулирования определяет, как и на основе какой
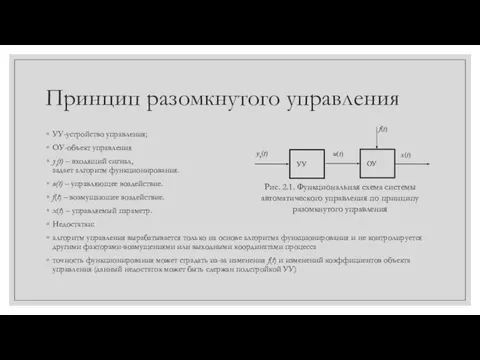
Слайд 3Принцип разомкнутого управления
УУ-устройство управления;
ОУ-объект управления
yз(t) – входящий сигнал,
задает алгоритм функционирования.
u(t) –
Принцип разомкнутого управления
УУ-устройство управления;
ОУ-объект управления
yз(t) – входящий сигнал,
задает алгоритм функционирования.
u(t) –
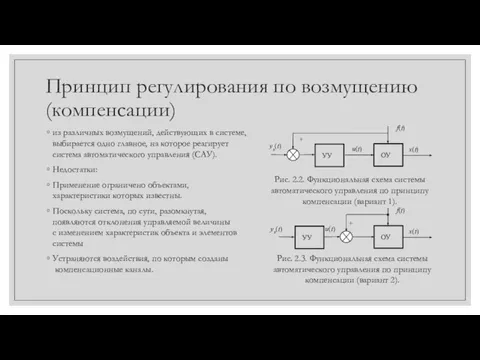
Слайд 4Принцип регулирования по возмущению (компенсации)
из различных возмущений, действующих в системе,
выбирается одно
Принцип регулирования по возмущению (компенсации)
из различных возмущений, действующих в системе, выбирается одно
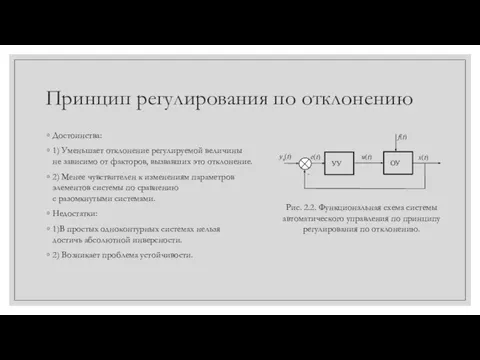
Слайд 5Принцип регулирования по отклонению
Достоинства:
1) Уменьшает отклонение регулируемой величины
не зависимо от
Принцип регулирования по отклонению
Достоинства:
1) Уменьшает отклонение регулируемой величины
не зависимо от
Слайд 6Комбинированное регулирование
Каждый из рассмотренных выше примеров
имеет свои достоинства и недостатки.
Поэтому
Комбинированное регулирование
Каждый из рассмотренных выше примеров имеет свои достоинства и недостатки. Поэтому
Слайд 7Принцип адаптации
Принципы адаптации (приспособление) используется в самонастраивающихся САУ. Особенностью их является то,
Принцип адаптации
Принципы адаптации (приспособление) используется в самонастраивающихся САУ. Особенностью их является то,
Слайд 8Классификация систем автоматического управления А. По принципу действия:
разомкнутые;
замкнутые (с обратной связью);
комбинированные (сочетают
Классификация систем автоматического управления А. По принципу действия:
разомкнутые;
замкнутые (с обратной связью);
комбинированные (сочетают
Слайд 9Классификация систем автоматического управления Б. По цели управления:
1) системы автоматического регулирования (САР)
Классификация систем автоматического управления Б. По цели управления:
1) системы автоматического регулирования (САР)
Слайд 10Классификация систем автоматического управления Б. По цели управления:
2) САУ других типов (обычно
Классификация систем автоматического управления Б. По цели управления:
2) САУ других типов (обычно
Слайд 11Классификация систем автоматического управления В. По классу уравнений, описывающих систему:
1) линейные и
Классификация систем автоматического управления В. По классу уравнений, описывающих систему:
1) линейные и
Слайд 12Классификация систем автоматического управления Г. По характеру преобразования переменных в элементах системы:
1)
Классификация систем автоматического управления Г. По характеру преобразования переменных в элементах системы:
1)
Слайд 13Классификация систем автоматического управления Д. По характеру процессов в системе:
Детерминированные и стохастические
Классификация систем автоматического управления Д. По характеру процессов в системе:
Детерминированные и стохастические
Слайд 14Классификация систем автоматического управления Е. По числу входных (задающих) и выходных (управляемых)
Классификация систем автоматического управления Е. По числу входных (задающих) и выходных (управляемых)
 Всеукраїнське друковане інформаційне видання для безкоштовного розповсюдження у поїздах Інтерсіті +, СВ
Всеукраїнське друковане інформаційне видання для безкоштовного розповсюдження у поїздах Інтерсіті +, СВ Задание по форматированию в Microsoft Word
Задание по форматированию в Microsoft Word ТЗ на дизайн проекта
ТЗ на дизайн проекта Электронная подпись
Электронная подпись Signatures. New messages and then go to signatures
Signatures. New messages and then go to signatures Работа с источниками информации. Защита авторских прав
Работа с источниками информации. Защита авторских прав Спортивные СМИ
Спортивные СМИ Ментального счета
Ментального счета Подходы к разработке web-приложений
Подходы к разработке web-приложений Технологии и опыт мирового уровня в области системной интеграции и разработки программного обеспечения
Технологии и опыт мирового уровня в области системной интеграции и разработки программного обеспечения Лаборатория онлайн бизнеса 2021
Лаборатория онлайн бизнеса 2021 Основные приемы программирования на языке С++
Основные приемы программирования на языке С++ Обучение команды Beeline по продукту LMS SmartExpert
Обучение команды Beeline по продукту LMS SmartExpert Многообразие компьютеров
Многообразие компьютеров Технологическое обеспечение ИС
Технологическое обеспечение ИС Этапы создания программного обеспечения
Этапы создания программного обеспечения Принципы упр АСУ от ЦВМ
Принципы упр АСУ от ЦВМ Кодирование графической информации
Кодирование графической информации Банкротство МСК и МО
Банкротство МСК и МО Системы счисления и ДЗ на 6_10
Системы счисления и ДЗ на 6_10 Добавление текстур
Добавление текстур Решу ЕГЭ. Образовательный портал для подготовки к экзаменам
Решу ЕГЭ. Образовательный портал для подготовки к экзаменам Для представления сервера PlayerWorld
Для представления сервера PlayerWorld Технология компонентного программирования
Технология компонентного программирования Алгоритмическая конструкция повторение
Алгоритмическая конструкция повторение ЛК_1_и_2_КСиТ_
ЛК_1_и_2_КСиТ_ Краткий гайд по прокачке 1-26 за Орду
Краткий гайд по прокачке 1-26 за Орду Год Памяти и Славы. Викторина
Год Памяти и Славы. Викторина