- Программирование контроллеров

Содержание
- 2. Мы знали, но забыли Устойчивость – это когда всё стабильно?
- 3. В любой сложной системе есть запаздывание: Подали напряжение на двигатель Подождали полсекундочки Обороты вышли на стабильную
- 4. В любой сложной системе есть запаздывание: Опустили монетку в снековый автомат Подождали 2 минуты Получили круассан
- 5. В любой сложной системе есть запаздывание: Посмотрели на светофор Загорелся зеленый Подождали секунду-две (в среднем) Перешли
- 6. Запаздывание? Как оценить величину запаздывания? Подать на систему сигнал Измерить запаздывание
- 7. Запаздывание? Как оценить величину запаздывания? Подать на систему сигнал Измерить запаздывание А как? Время достижения установившегося
- 8. Как будет удобнее? Сигналы бывают разные Постоянный сигнал Скачок Пила Треугольник Шум Синус
- 9. Как будет удобнее? Любой периодический сигнал можно представить суммой гармонических сигналов разных частот и амплитуд. Если
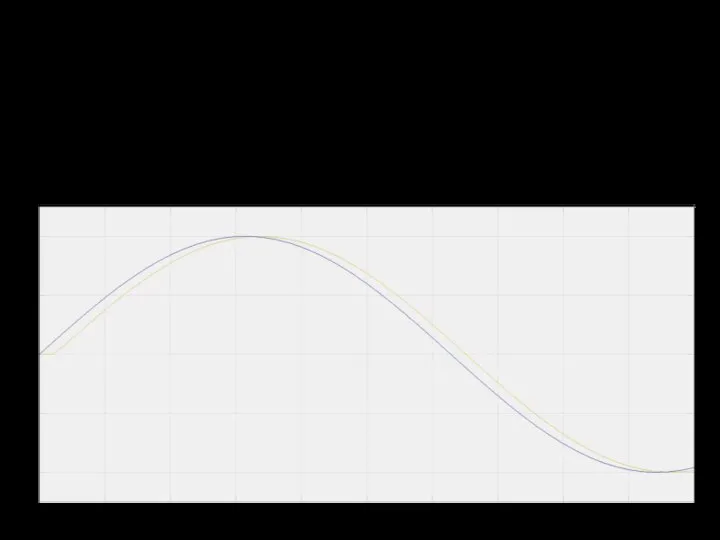
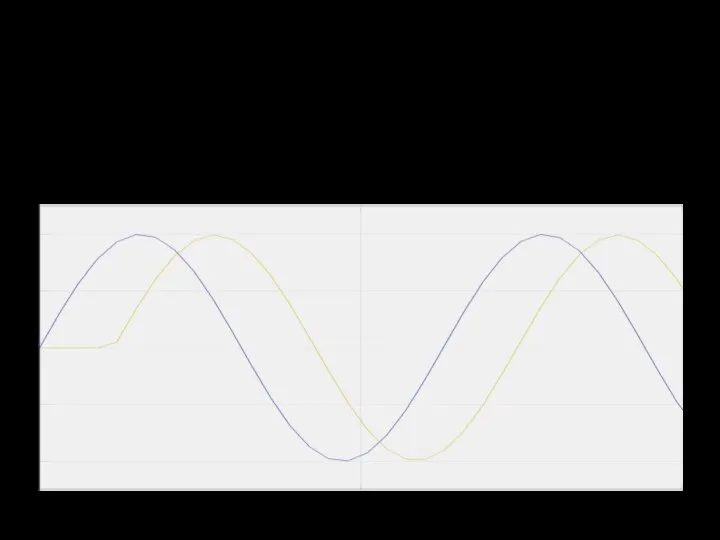
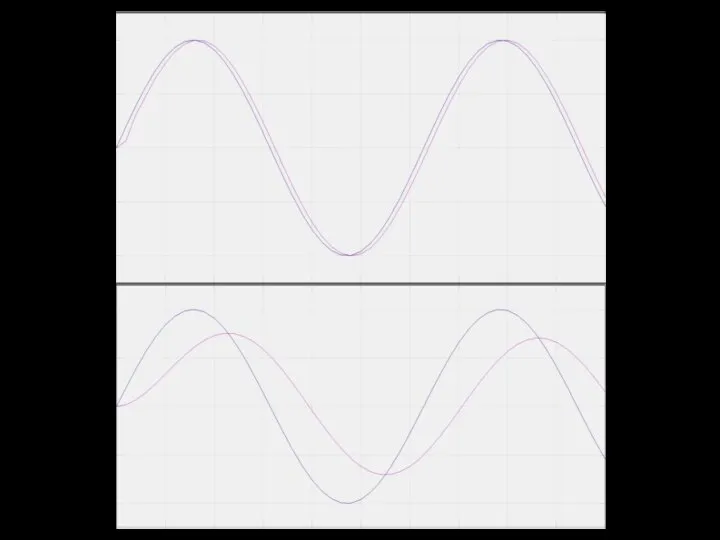
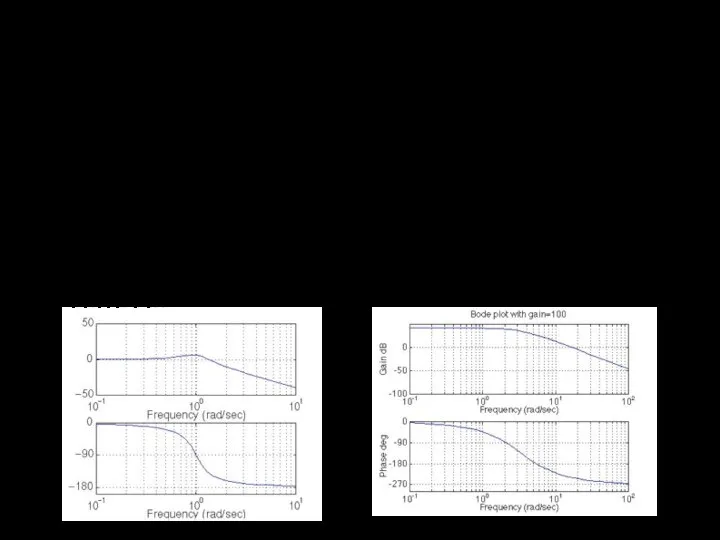
- 10. Эксперимент Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
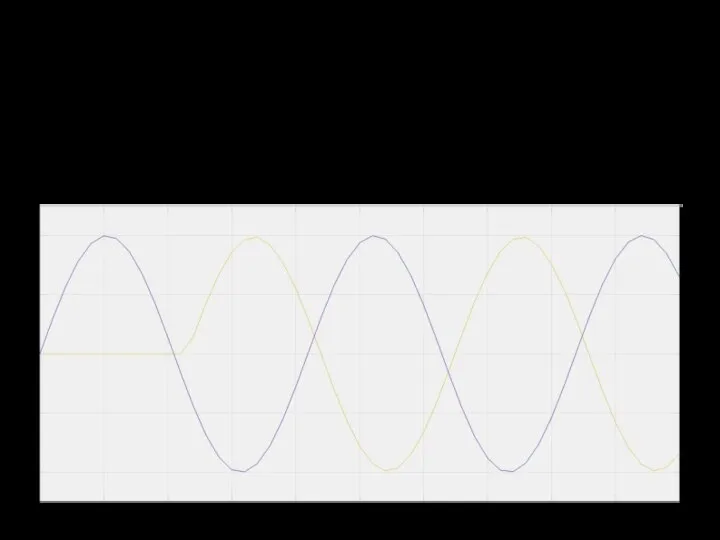
- 11. Эксперимент Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
- 12. Эксперимент Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
- 13. Что это нам дает? В эксперименте время запаздывания было постоянным на всех частотах, в реальной жизни
- 14. При чем тут устойчивость? Пора вспомнить, чем мы тут занимаемся Основной принцип управления объектами – управление
- 15. При чем тут устойчивость? То есть отрицательная обратная связь становится положительной!
- 16. Насколько это плохо? Xвх - Xвых = A * sin(wt) + B * sin(wt) = (A
- 17. Упростим Для удобства примем А = 1: Xвх - Xвых = (1 + B) * sin(wt)
- 18. Проще не стало Оставим только амплитуду синуса, сам синус больше 1 не станет точно: |Xвх –
- 19. Для наглядности Если B = 0.9, то амплитуда синусоиды ошибки будет стремиться к 10 при входном
- 20. Что такое B? B – отношение амплитуды выходного сигнала ко входному на частоте, запаздывание на которой
- 21. Что мы узнали? 1) Как обычно описывают запаздывание 2) Как оно может навредить системе 3) В
- 22. Запаздывание? Никогда не встречал Бывает ли чистое запаздывание в жизни? На самом деле чистое запаздывание в
- 23. Запаздывание? Никогда не встречал Двигатель не набирает скорость мгновенно? - это ток не может резко нарасти
- 24. Что это нам даёт? Это означает, что при увеличении частоты синуса на входе значения внутренних переменных
- 26. Объекты в жизни Посмотрим на возможное поведение коэффициента передачи объектов при увеличении частоты входного сигнала: 1)
- 27. Объекты в жизни Как мы только что убедились, запаздывание, в основном, приносит вместе с собой уменьшение
- 28. Объекты в жизни Второй вариант – наиболее распространённый случай. Стабильные объекты обычно обладают фильтрующими свойствами (снижают
- 29. Объекты в жизни Третий вариант – тоже довольно редкий. В качестве примера можно привести тахогенератор, на
- 30. Куда уходит устойчивость? Если объекты вокруг устойчивы, то к чему тогда весь разговор?
- 31. Куда уходит устойчивость? Объекты устойчивы, когда мы не пытаемся ими управлять! А вот наша система управления
- 32. Что мы узнали ещё? 1) Большинство объектов устойчиво 2) Устойчивость уменьшает система управления 3) Человек всё
- 33. Как сильно всё испорчено? Как оценить, сильно снизилась устойчивость или нет?
- 34. Как сильно всё испорчено? Можно определить, насколько далеко от текущей ситуации находится неустойчивое положение. Обычно, это
- 35. Запасы устойчивости Выйти из зоны устойчивости объект может двумя путями: 1) Если коэффициент передачи увеличится настолько,
- 36. Бывает ли такое? Для примера возьмём двигатель 1) Нагрелись обмотки из-за работы на большую нагрузку и
- 37. Как проверить систему на устойчивость Снять зависимости амплитуды и угла запаздывания от частоты на диапазоне от
- 38. Как проверить систему на устойчивость А если у нас микроконтроллер и преобразование Фурье нам делать слишком
- 39. Как проверить систему на устойчивость Можно искуственно создать изменения в системе и оценить величину запасов: 1)
- 40. Проблемы автоматизации Чтобы автоматизировать процесс, надо уметь определять устойчивые колебания. Они могут прийтись на ту частоту,
- 42. Скачать презентацию

Слайд 3В любой сложной системе есть запаздывание:
Подали напряжение на двигатель
Подождали полсекундочки
Обороты вышли на
В любой сложной системе есть запаздывание:
Подали напряжение на двигатель
Подождали полсекундочки
Обороты вышли на
Слайд 4В любой сложной системе есть запаздывание:
Опустили монетку в снековый автомат
Подождали 2 минуты
Получили
В любой сложной системе есть запаздывание:
Опустили монетку в снековый автомат
Подождали 2 минуты
Получили
Слайд 5В любой сложной системе есть запаздывание:
Посмотрели на светофор
Загорелся зеленый
Подождали секунду-две (в среднем)
Перешли
В любой сложной системе есть запаздывание:
Посмотрели на светофор
Загорелся зеленый
Подождали секунду-две (в среднем)
Перешли
Слайд 6Запаздывание?
Как оценить величину запаздывания?
Подать на систему сигнал
Измерить запаздывание
Запаздывание?
Как оценить величину запаздывания?
Подать на систему сигнал
Измерить запаздывание
Слайд 7Запаздывание?
Как оценить величину запаздывания?
Подать на систему сигнал
Измерить запаздывание
А как?
Время достижения установившегося
Запаздывание?
Как оценить величину запаздывания?
Подать на систему сигнал
Измерить запаздывание
А как?
Время достижения установившегося
Слайд 8Как будет удобнее?
Сигналы бывают разные
Постоянный сигнал
Скачок
Пила
Треугольник
Шум
Синус
Как будет удобнее?
Сигналы бывают разные
Постоянный сигнал
Скачок
Пила
Треугольник
Шум
Синус
Слайд 9Как будет удобнее?
Любой периодический сигнал можно представить суммой гармонических сигналов разных частот
Как будет удобнее?
Любой периодический сигнал можно представить суммой гармонических сигналов разных частот
Слайд 10Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Слайд 11Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Слайд 12Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Эксперимент
Будем подавать на объект чистые синусоиды и наблюдать за реакцией объекта
Слайд 13Что это нам дает?
В эксперименте время запаздывания было постоянным на всех частотах,
Что это нам дает?
В эксперименте время запаздывания было постоянным на всех частотах,
Слайд 14При чем тут устойчивость?
Пора вспомнить, чем мы тут занимаемся
Основной принцип управления объектами
При чем тут устойчивость?
Пора вспомнить, чем мы тут занимаемся
Основной принцип управления объектами
Слайд 15При чем тут устойчивость?
То есть отрицательная обратная связь становится положительной!
При чем тут устойчивость?
То есть отрицательная обратная связь становится положительной!

Слайд 16Насколько это плохо?
Xвх - Xвых = A * sin(wt) + B *
Насколько это плохо?
Xвх - Xвых = A * sin(wt) + B *
Слайд 17Упростим
Для удобства примем А = 1:
Xвх - Xвых = (1 + B)
Упростим
Для удобства примем А = 1:
Xвх - Xвых = (1 + B)
Слайд 18Проще не стало
Оставим только амплитуду синуса, сам синус больше 1 не станет
Проще не стало
Оставим только амплитуду синуса, сам синус больше 1 не станет
Слайд 19Для наглядности
Если B = 0.9, то амплитуда синусоиды ошибки будет стремиться к
Для наглядности
Если B = 0.9, то амплитуда синусоиды ошибки будет стремиться к
Слайд 20Что такое B?
B – отношение амплитуды выходного сигнала ко входному на частоте,
Что такое B?
B – отношение амплитуды выходного сигнала ко входному на частоте,
Слайд 21Что мы узнали?
1) Как обычно описывают запаздывание
2) Как оно может навредить системе
3)
Что мы узнали?
1) Как обычно описывают запаздывание
2) Как оно может навредить системе
3)
Слайд 22Запаздывание? Никогда не встречал
Бывает ли чистое запаздывание в жизни?
На самом деле чистое
Запаздывание? Никогда не встречал
Бывает ли чистое запаздывание в жизни?
На самом деле чистое
Слайд 23Запаздывание? Никогда не встречал
Двигатель не набирает скорость мгновенно? - это ток не
Запаздывание? Никогда не встречал
Двигатель не набирает скорость мгновенно? - это ток не
Слайд 24Что это нам даёт?
Это означает, что при увеличении частоты синуса на входе
Что это нам даёт?
Это означает, что при увеличении частоты синуса на входе
Слайд 26Объекты в жизни
Посмотрим на возможное поведение коэффициента передачи объектов при увеличении частоты
Объекты в жизни
Посмотрим на возможное поведение коэффициента передачи объектов при увеличении частоты
Слайд 27Объекты в жизни
Как мы только что убедились, запаздывание, в основном, приносит вместе
Объекты в жизни
Как мы только что убедились, запаздывание, в основном, приносит вместе
Слайд 28Объекты в жизни
Второй вариант – наиболее распространённый случай. Стабильные объекты обычно обладают
Объекты в жизни
Второй вариант – наиболее распространённый случай. Стабильные объекты обычно обладают
Слайд 29Объекты в жизни
Третий вариант – тоже довольно редкий. В качестве примера можно
Объекты в жизни
Третий вариант – тоже довольно редкий. В качестве примера можно
Слайд 30Куда уходит устойчивость?
Если объекты вокруг устойчивы, то к чему тогда весь разговор?
Куда уходит устойчивость?
Если объекты вокруг устойчивы, то к чему тогда весь разговор?
Слайд 31Куда уходит устойчивость?
Объекты устойчивы, когда мы не пытаемся ими управлять!
А вот наша
Куда уходит устойчивость?
Объекты устойчивы, когда мы не пытаемся ими управлять!
А вот наша
Слайд 32Что мы узнали ещё?
1) Большинство объектов устойчиво
2) Устойчивость уменьшает система управления
3) Человек
Что мы узнали ещё?
1) Большинство объектов устойчиво
2) Устойчивость уменьшает система управления
3) Человек
Слайд 33Как сильно всё испорчено?
Как оценить, сильно снизилась устойчивость или нет?
Как сильно всё испорчено?
Как оценить, сильно снизилась устойчивость или нет?
Слайд 34Как сильно всё испорчено?
Можно определить, насколько далеко от текущей ситуации находится неустойчивое
Как сильно всё испорчено?
Можно определить, насколько далеко от текущей ситуации находится неустойчивое
Слайд 35Запасы устойчивости
Выйти из зоны устойчивости объект может двумя путями:
1) Если коэффициент передачи
Запасы устойчивости
Выйти из зоны устойчивости объект может двумя путями:
1) Если коэффициент передачи
Слайд 36Бывает ли такое?
Для примера возьмём двигатель
1) Нагрелись обмотки из-за работы на большую
Бывает ли такое?
Для примера возьмём двигатель
1) Нагрелись обмотки из-за работы на большую
Слайд 37Как проверить систему на устойчивость
Снять зависимости амплитуды и угла запаздывания от частоты
Как проверить систему на устойчивость
Снять зависимости амплитуды и угла запаздывания от частоты
Слайд 38Как проверить систему на устойчивость
А если у нас микроконтроллер и преобразование Фурье
Как проверить систему на устойчивость
А если у нас микроконтроллер и преобразование Фурье
Слайд 39Как проверить систему на устойчивость
Можно искуственно создать изменения в системе и оценить
Как проверить систему на устойчивость
Можно искуственно создать изменения в системе и оценить
Слайд 40Проблемы автоматизации
Чтобы автоматизировать процесс, надо уметь определять устойчивые колебания.
Они могут прийтись на
Проблемы автоматизации
Чтобы автоматизировать процесс, надо уметь определять устойчивые колебания.
Они могут прийтись на
 Управление памятью. Иерархия памяти
Управление памятью. Иерархия памяти Изобретатель Приложений. Урок 6
Изобретатель Приложений. Урок 6 Этапы прохождения. Играть
Этапы прохождения. Играть Интернет-технологии и распределённая обработка данных. Лекция 15
Интернет-технологии и распределённая обработка данных. Лекция 15 Системы программирования
Системы программирования Циклические алгоритмы
Циклические алгоритмы Информационная безопасность
Информационная безопасность Моделирование дивана в программе 3D Max
Моделирование дивана в программе 3D Max OpenWorks Vision Tracker
OpenWorks Vision Tracker Ты меня не тролль
Ты меня не тролль Служебные программы ОС
Служебные программы ОС Презентация "Компания Системного Интегрирования" - скачать презентации по Информатике
Презентация "Компания Системного Интегрирования" - скачать презентации по Информатике 3D-моделирование. Знакомство с TinkerCAD
3D-моделирование. Знакомство с TinkerCAD Классификация систем памяти. Характеристики памяти
Классификация систем памяти. Характеристики памяти Алгоритм работы автозаказа
Алгоритм работы автозаказа Компьюьерная память
Компьюьерная память Будни Интернета: война ботов
Будни Интернета: война ботов Анимация. Подводный мир
Анимация. Подводный мир _Р 2.Т 2.4 Передача ИНФ
_Р 2.Т 2.4 Передача ИНФ MPA1000 sw-master Doxygen documentation
MPA1000 sw-master Doxygen documentation Библиотека в социальных сетях
Библиотека в социальных сетях Тайны Бейкер-стрит
Тайны Бейкер-стрит Файлы и папки. Имя слайда
Файлы и папки. Имя слайда Автоматическая обработка информации Информатика 10 класс
Автоматическая обработка информации Информатика 10 класс Контрольные задания по java
Контрольные задания по java Лайфхаки в Word
Лайфхаки в Word Этапы создания многотабличной БД с помощью реляционной СУБД
Этапы создания многотабличной БД с помощью реляционной СУБД Передача информации по техническим каналам к § 8 в учебнике И. Г. Семакина, Е. К. Хеннера
Передача информации по техническим каналам к § 8 в учебнике И. Г. Семакина, Е. К. Хеннера