Разработка и реализация алгоритма создания и балансировки двоичного дерева поиска со взвешенными узлами
- Разработка и реализация алгоритма создания и балансировки двоичного дерева поиска со взвешенными узлами

Содержание
- 2. Цель работы Разработка структуры: -минимальные затраты памяти; -быстрый поиск; -приоритезированный доступ. Реализация структуры. Анализ эффективности. Визуализация.
- 3. Балансировка двоичных деревьев поиска По высоте По весу По количеству узлов
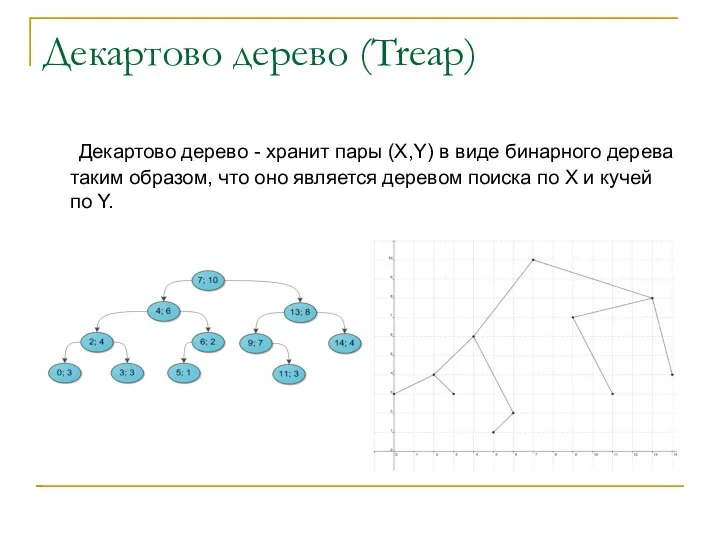
- 4. Декартово дерево (Treap) Декартово дерево - хранит пары (X,Y) в виде бинарного дерева таким образом, что
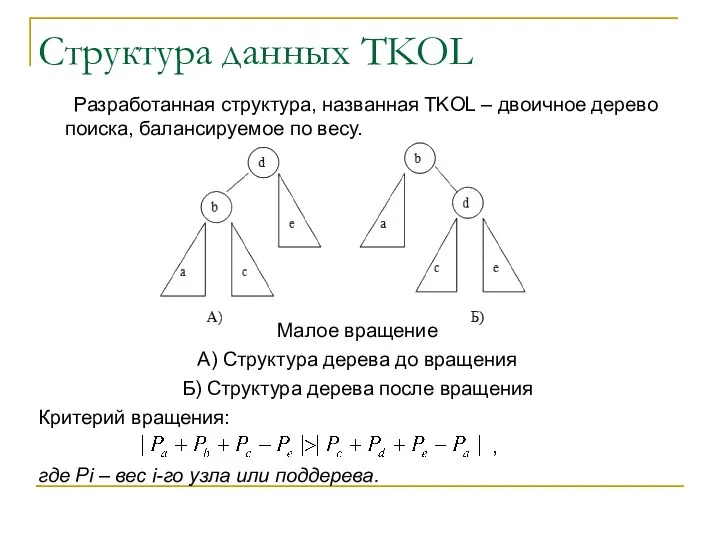
- 5. Структура данных TKOL Разработанная структура, названная TKOL – двоичное дерево поиска, балансируемое по весу. Малое вращение
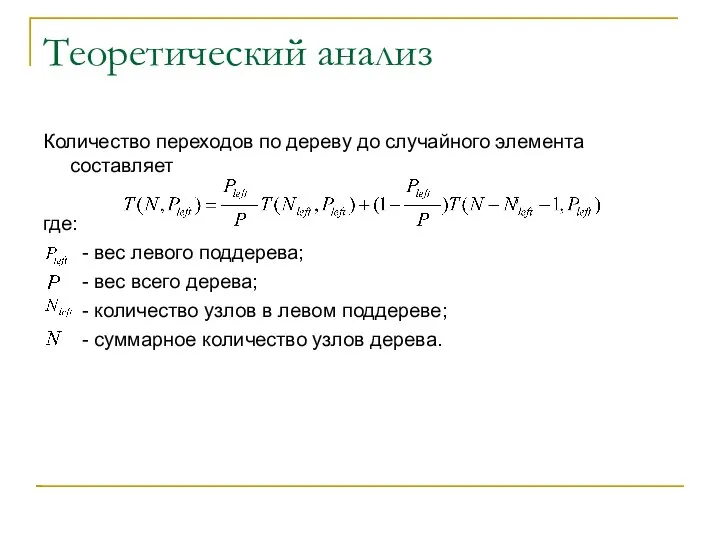
- 6. Теоретический анализ Количество переходов по дереву до случайного элемента составляет , где: - вес левого поддерева;
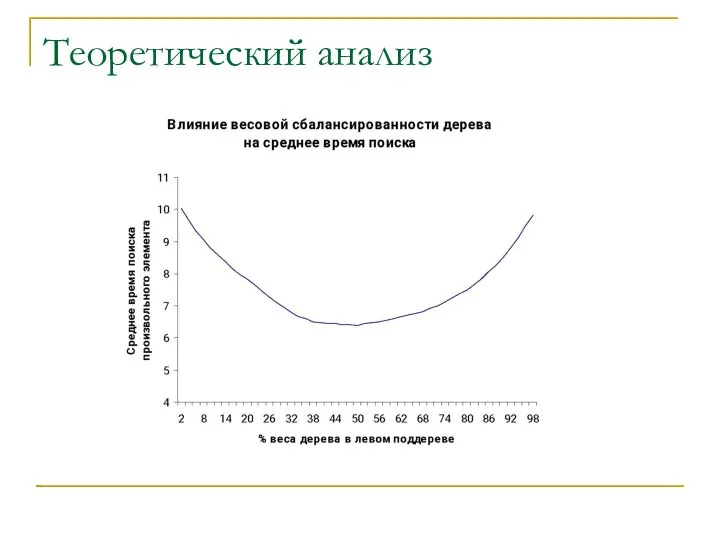
- 7. Теоретический анализ
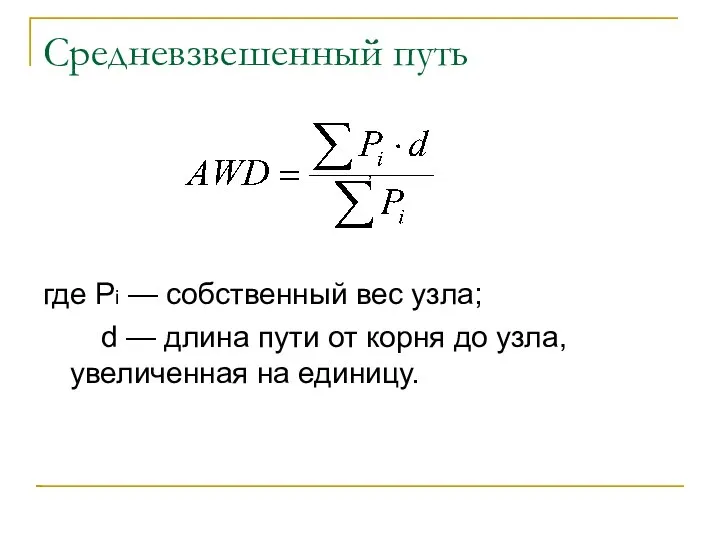
- 8. Средневзвешенный путь , где Pi — собственный вес узла; d — длина пути от корня до
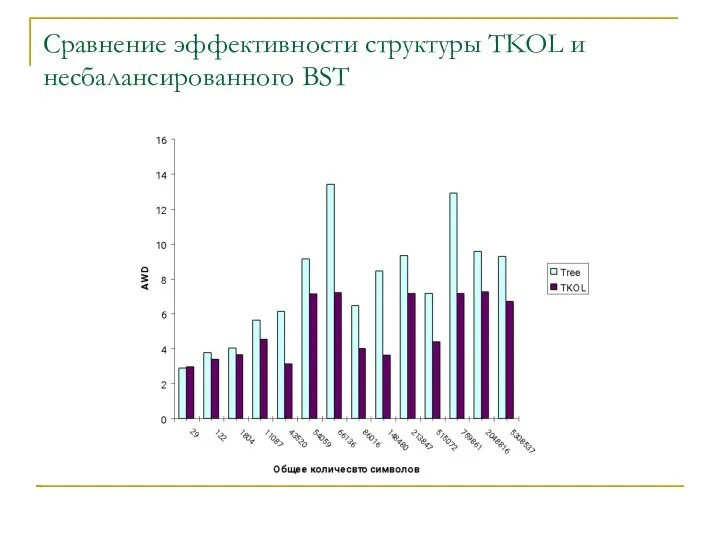
- 9. Сравнение эффективности структуры TKOL и несбалансированного BST
- 11. Скачать презентацию
Слайд 2Цель работы
Разработка структуры:
-минимальные затраты памяти;
-быстрый поиск;
-приоритезированный доступ.
Реализация структуры.
Анализ эффективности.
Визуализация.
Цель работы
Разработка структуры:
-минимальные затраты памяти;
-быстрый поиск;
-приоритезированный доступ.
Реализация структуры.
Анализ эффективности.
Визуализация.
Слайд 3Балансировка двоичных деревьев поиска
По высоте
По весу
По количеству узлов
Балансировка двоичных деревьев поиска
По высоте
По весу
По количеству узлов
Слайд 4Декартово дерево (Treap)
Декартово дерево - хранит пары (X,Y) в виде бинарного дерева
Декартово дерево (Treap)
Декартово дерево - хранит пары (X,Y) в виде бинарного дерева
Слайд 5Структура данных TKOL
Разработанная структура, названная TKOL – двоичное дерево поиска, балансируемое по
Структура данных TKOL
Разработанная структура, названная TKOL – двоичное дерево поиска, балансируемое по
Слайд 6Теоретический анализ
Количество переходов по дереву до случайного элемента составляет
,
где:
- вес
Теоретический анализ
Количество переходов по дереву до случайного элемента составляет
,
где:
- вес
Слайд 7Теоретический анализ
Теоретический анализ
Слайд 8Средневзвешенный путь
,
где Pi — собственный вес узла;
d — длина пути от
Средневзвешенный путь
,
где Pi — собственный вес узла;
d — длина пути от
Слайд 9Сравнение эффективности структуры TKOL и несбалансированного BST
Сравнение эффективности структуры TKOL и несбалансированного BST
 Примеры использования внешних устройств, подключаемых к компьютеру. Программное обеспечение
Примеры использования внешних устройств, подключаемых к компьютеру. Программное обеспечение Freelance. Звіт з курсового проекту
Freelance. Звіт з курсового проекту Яндекс Диск. Знакомимся с синхронизацией
Яндекс Диск. Знакомимся с синхронизацией Ограничение доступа к интернет-ресурсам, как нарушение права на свободу выражения мнений
Ограничение доступа к интернет-ресурсам, как нарушение права на свободу выражения мнений Построение кривой безье в среде Visual Studio с использованием языка программирования С#
Построение кривой безье в среде Visual Studio с использованием языка программирования С# Организация ввода-вывода в Pascal
Организация ввода-вывода в Pascal Непростительные ошибки при сохранении (примеры)
Непростительные ошибки при сохранении (примеры) Основные принципы построения автоматизированных систем (Тема 3)
Основные принципы построения автоматизированных систем (Тема 3) Основы PowerShell
Основы PowerShell Осенний пейзаж. Рисование во встроенных графических редакторах (MS Word, OpenOffice.org Writer)
Осенний пейзаж. Рисование во встроенных графических редакторах (MS Word, OpenOffice.org Writer)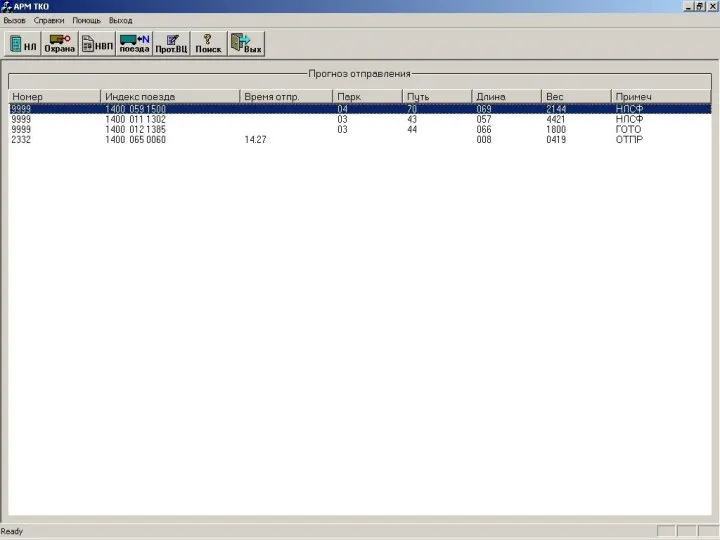 Формы оператора ТКО
Формы оператора ТКО Прикладное программное обеспечение для анализа рынка на основе данных социальных сетей
Прикладное программное обеспечение для анализа рынка на основе данных социальных сетей Как не потерять ни одного документа и сэкономить на почте
Как не потерять ни одного документа и сэкономить на почте Растровая и векторная графика. Знаки и символы
Растровая и векторная графика. Знаки и символы Арбитраж трафика
Арбитраж трафика Наука информатика
Наука информатика Программирование на языке Python
Программирование на языке Python Основы программирования на С++
Основы программирования на С++ Рисуем зонтик
Рисуем зонтик Правила оформления библиографического списка к Научной работе. Занятие 7
Правила оформления библиографического списка к Научной работе. Занятие 7 ЯПВУ. Лекция 1. Виды интерфейсов Windows
ЯПВУ. Лекция 1. Виды интерфейсов Windows Хранение и передача информации
Хранение и передача информации Мобильный избиратель в мобильном устройстве. Автоматика-1
Мобильный избиратель в мобильном устройстве. Автоматика-1 Управление исполнителем Чертёжник
Управление исполнителем Чертёжник Система сохранения
Система сохранения Презентация на тему Передача информации
Презентация на тему Передача информации  Мобильная программа на android
Мобильная программа на android Обработка графической информации
Обработка графической информации