- Разработка программного обеспечения для управления движением мобильной платформы KUKA youBot

Содержание
- 2. Цель работы Организовать движение робота с постоянной скоростью вдоль линии, объезд одиночного препятствия и возврат на
- 3. Объекты исследования Объектами исследования данной работы являются робот KUKA youBot, лазерный дальномер Hokuyo URG-04LX и программное
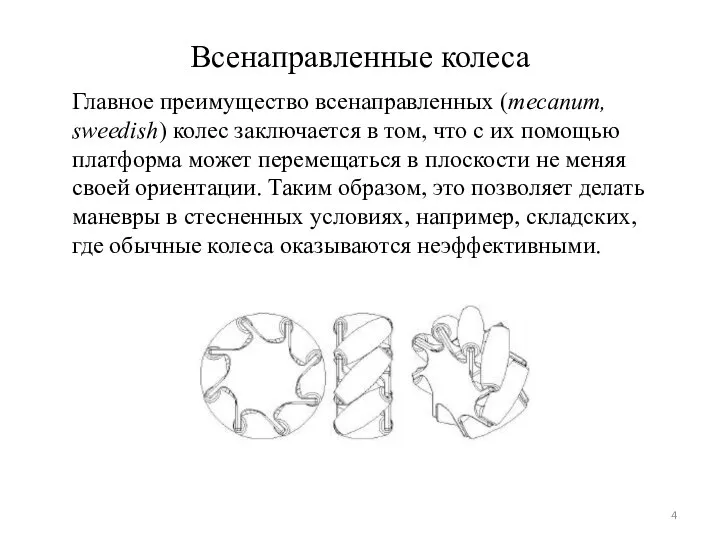
- 4. Всенаправленные колеса Главное преимущество всенаправленных (mecanum, sweedish) колес заключается в том, что с их помощью платформа
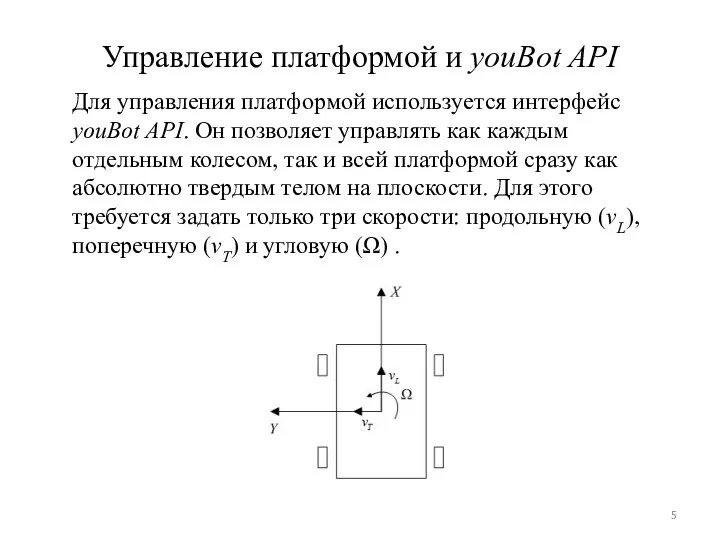
- 5. Управление платформой и youBot API Для управления платформой используется интерфейс youBot API. Он позволяет управлять как
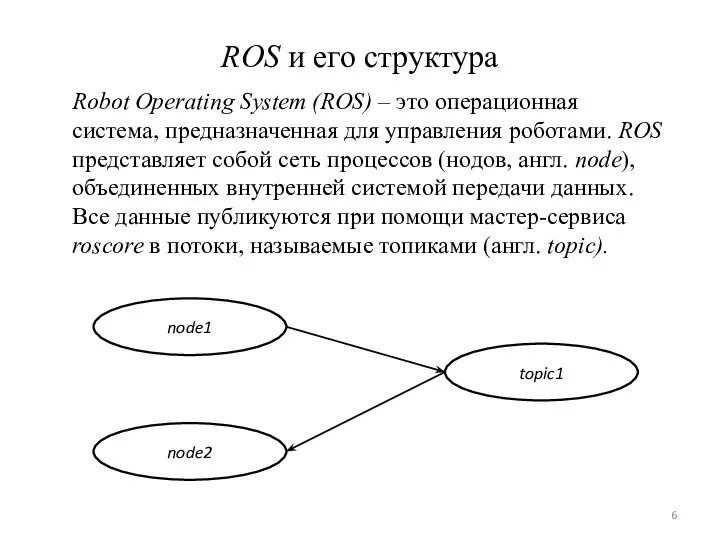
- 6. ROS и его структура Robot Operating System (ROS) – это операционная система, предназначенная для управления роботами.
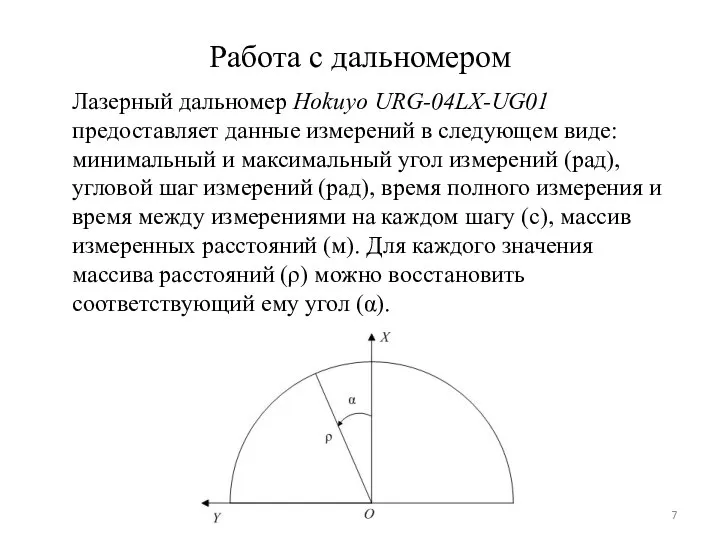
- 7. Работа с дальномером Лазерный дальномер Hokuyo URG-04LX-UG01 предоставляет данные измерений в следующем виде: минимальный и максимальный
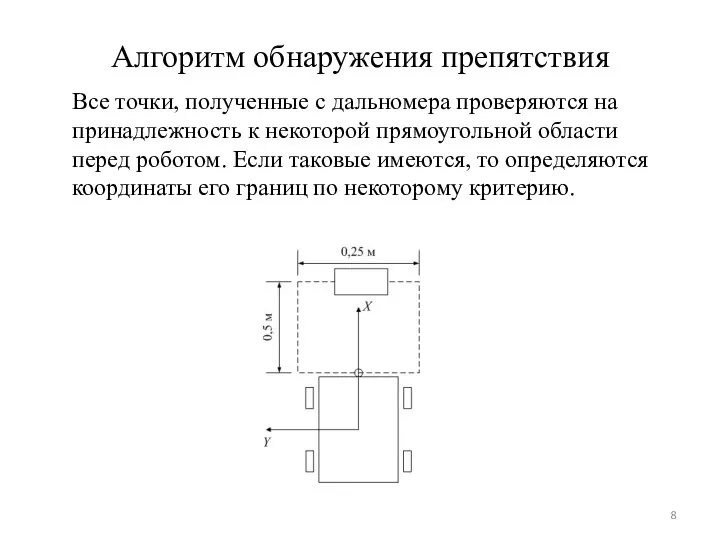
- 8. Алгоритм обнаружения препятствия Все точки, полученные с дальномера проверяются на принадлежность к некоторой прямоугольной области перед
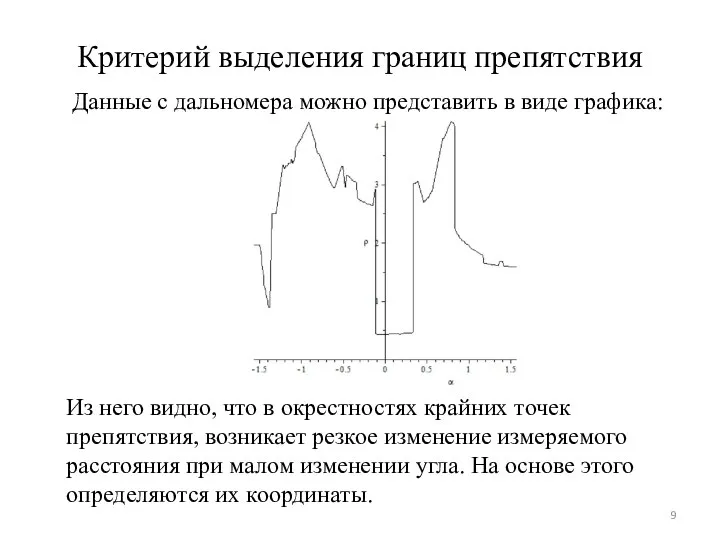
- 9. Критерий выделения границ препятствия Данные с дальномера можно представить в виде графика: Из него видно, что
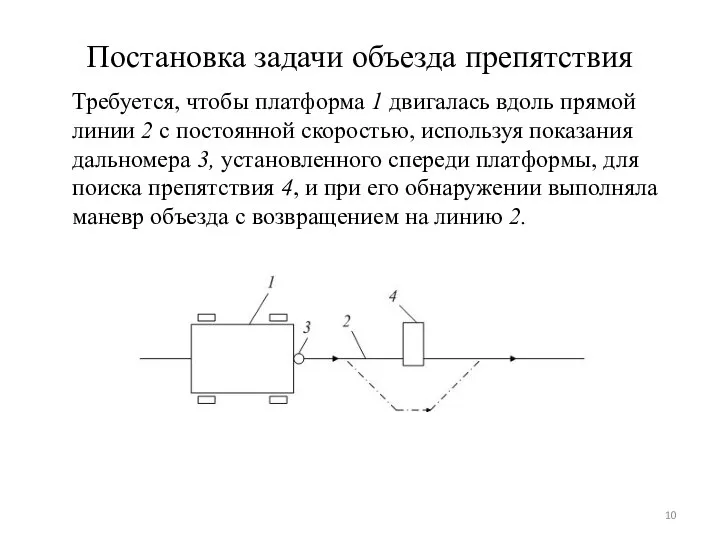
- 10. Постановка задачи объезда препятствия Требуется, чтобы платформа 1 двигалась вдоль прямой линии 2 с постоянной скоростью,
- 11. Схема алгоритма решения Опрос дальномера, проверка на наличие препятствия в области и по бокам от платформы,
- 12. Счисление координат Счисление координат центра платформы используется для определения ее положения относительно препятствия. С их помощью
- 13. Выбор направления маневра
- 14. Результаты отработки алгоритма Во время пробного запуска были получены: траектория движения центра платформы 1 набор точек,
- 15. Результаты отработки алгоритма
- 17. Скачать презентацию
Слайд 2Цель работы
Организовать движение робота с постоянной скоростью вдоль линии, объезд одиночного препятствия
Цель работы
Организовать движение робота с постоянной скоростью вдоль линии, объезд одиночного препятствия
Слайд 3Объекты исследования
Объектами исследования данной работы являются робот KUKA youBot, лазерный дальномер Hokuyo
Объекты исследования
Объектами исследования данной работы являются робот KUKA youBot, лазерный дальномер Hokuyo

Слайд 4Всенаправленные колеса
Главное преимущество всенаправленных (mecanum, sweedish) колес заключается в том, что с
Всенаправленные колеса
Главное преимущество всенаправленных (mecanum, sweedish) колес заключается в том, что с
Слайд 5Управление платформой и youBot API
Для управления платформой используется интерфейс youBot API. Он
Управление платформой и youBot API
Для управления платформой используется интерфейс youBot API. Он
Слайд 6ROS и его структура
Robot Operating System (ROS) – это операционная система, предназначенная
ROS и его структура
Robot Operating System (ROS) – это операционная система, предназначенная
Слайд 7Работа с дальномером
Лазерный дальномер Hokuyo URG-04LX-UG01 предоставляет данные измерений в следующем виде:
Работа с дальномером
Лазерный дальномер Hokuyo URG-04LX-UG01 предоставляет данные измерений в следующем виде:
Слайд 8Алгоритм обнаружения препятствия
Все точки, полученные с дальномера проверяются на принадлежность к некоторой
Алгоритм обнаружения препятствия
Все точки, полученные с дальномера проверяются на принадлежность к некоторой
Слайд 9Критерий выделения границ препятствия
Данные с дальномера можно представить в виде графика:
Из
Критерий выделения границ препятствия
Данные с дальномера можно представить в виде графика:
Из
Слайд 10Постановка задачи объезда препятствия
Требуется, чтобы платформа 1 двигалась вдоль прямой линии 2
Постановка задачи объезда препятствия
Требуется, чтобы платформа 1 двигалась вдоль прямой линии 2
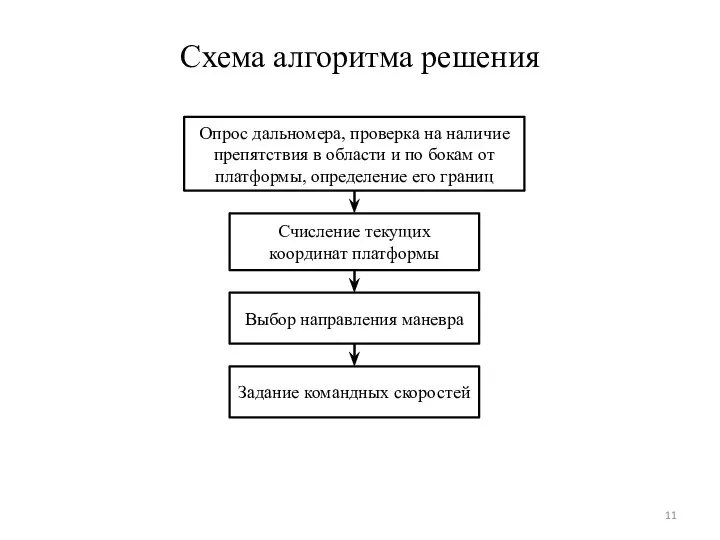
Слайд 11Схема алгоритма решения
Опрос дальномера, проверка на наличие препятствия в области и
Схема алгоритма решения
Опрос дальномера, проверка на наличие препятствия в области и
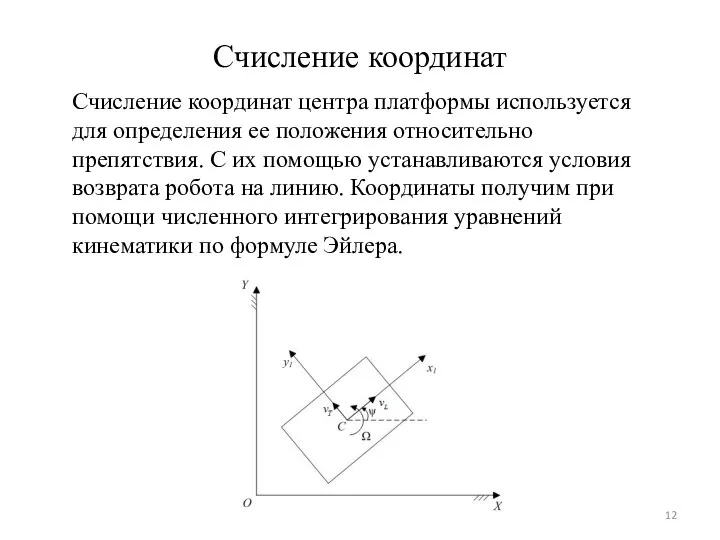
Слайд 12Счисление координат
Счисление координат центра платформы используется для определения ее положения относительно препятствия.
Счисление координат
Счисление координат центра платформы используется для определения ее положения относительно препятствия.
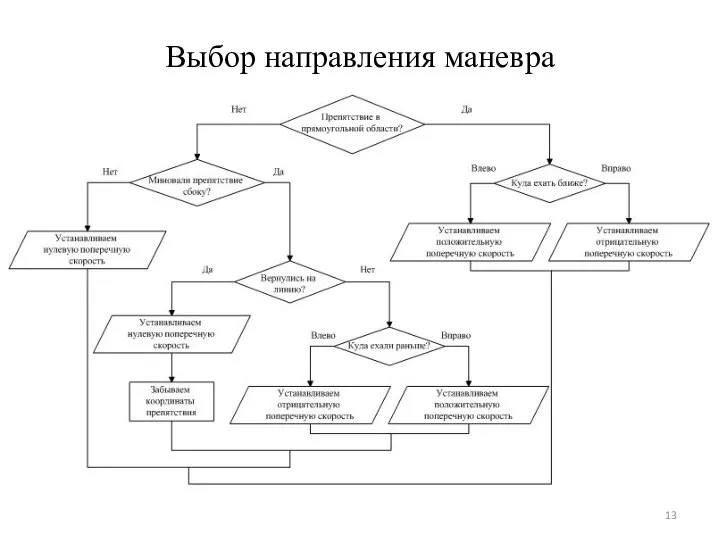
Слайд 13Выбор направления маневра
Выбор направления маневра
Слайд 14Результаты отработки алгоритма
Во время пробного запуска были получены:
траектория движения центра платформы
Результаты отработки алгоритма
Во время пробного запуска были получены:
траектория движения центра платформы

Слайд 15Результаты отработки алгоритма
Результаты отработки алгоритма

 Создание отзыва
Создание отзыва Орион 3. Отличия от Ориона 2+
Орион 3. Отличия от Ориона 2+ Электронно-библиотечная система консультант студента
Электронно-библиотечная система консультант студента Алгоритмы цикла
Алгоритмы цикла Внешние факторы ранжирования Web-страниц
Внешние факторы ранжирования Web-страниц Запретная зона. Защита от попаданий Агрессора в зону X<-50 на координатной плоскости
Запретная зона. Защита от попаданий Агрессора в зону X<-50 на координатной плоскости Soundpad Demo.url
Soundpad Demo.url Финансовая безопасность
Финансовая безопасность Формирование каталога CТЕ для Портал поставщиков
Формирование каталога CТЕ для Портал поставщиков Головоломки со спичками. Программа PascalABCNet
Головоломки со спичками. Программа PascalABCNet Кодирование информации. Основные термины
Кодирование информации. Основные термины CryptoBox. Применение шифрования
CryptoBox. Применение шифрования Востребованность ИТ-специалистов в Воронежской области
Востребованность ИТ-специалистов в Воронежской области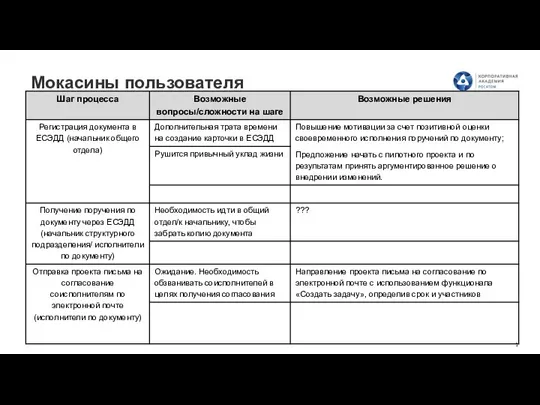 Мокасины пользователя
Мокасины пользователя Компьютерные сети
Компьютерные сети Lec6_PP (1)
Lec6_PP (1) Бренд “Шэнд”. Итоги шестой недели
Бренд “Шэнд”. Итоги шестой недели Секретарь онлайн-проектов
Секретарь онлайн-проектов Методология процессного подхода ARIS
Методология процессного подхода ARIS Системы счисления
Системы счисления Использование эффектов и плагинов при видеомонтаже
Использование эффектов и плагинов при видеомонтаже Электронные презентации
Электронные презентации Проблемы развития киберспорта в регионах России
Проблемы развития киберспорта в регионах России Откуда книга пришла. Урок-путешествие
Откуда книга пришла. Урок-путешествие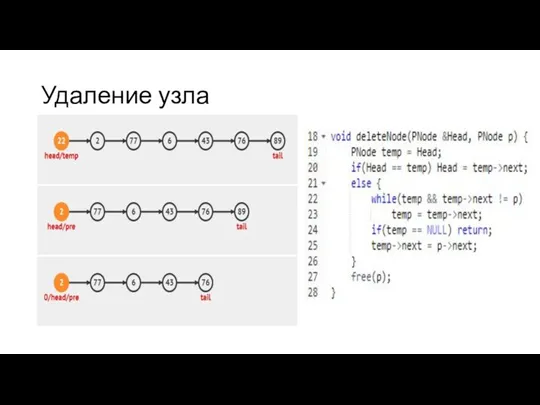 Односвязный список
Односвязный список Эволюция и общие принципы построения сетей
Эволюция и общие принципы построения сетей Ithub-2
Ithub-2 Монтаж видео. Переходы
Монтаж видео. Переходы