- Системы диспетчерского контроля на новой элементной базе

Содержание
- 2. Основным принципом информационного обеспечения СПД-ЛП является создание комплексной единой базы данных, отображающей поездную, вагонную, локомотивную бригадную
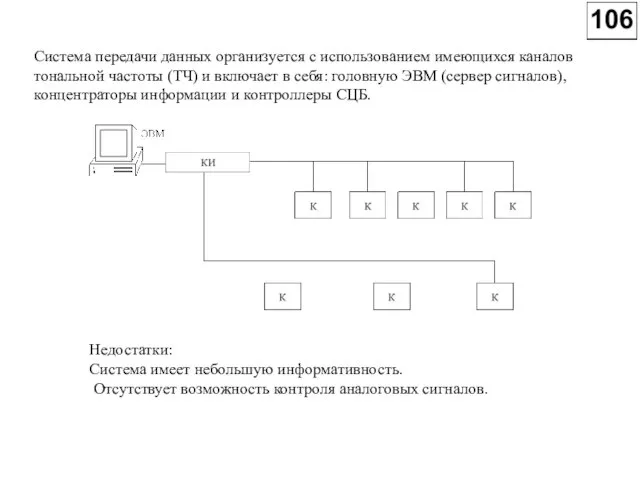
- 3. Система передачи данных организуется с использованием имеющихся каналов тональной частоты (ТЧ) и включает в себя: головную
- 4. АСДК представляет собой аппаратно-программный комплекс, обеспечивающий диспетчерский контроль состояния отдельных узлов и устройств автоматики, телемеханики и
- 6. Аппаратура нижнего уровня содержит: а) модуль линейный аналоговый (МАЛ), предназначенный для сбора и преобразования в цифровой
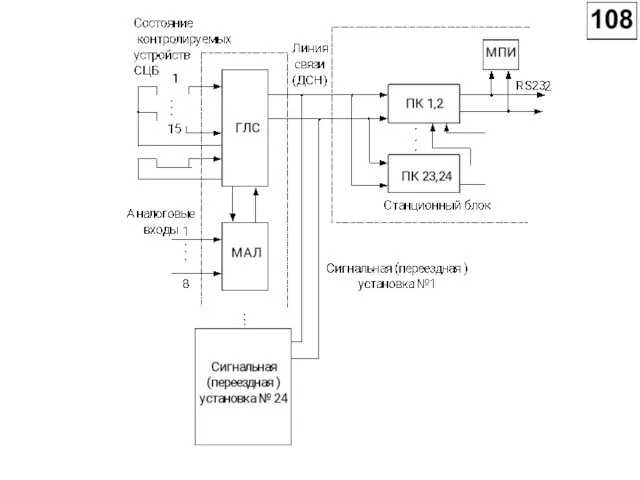
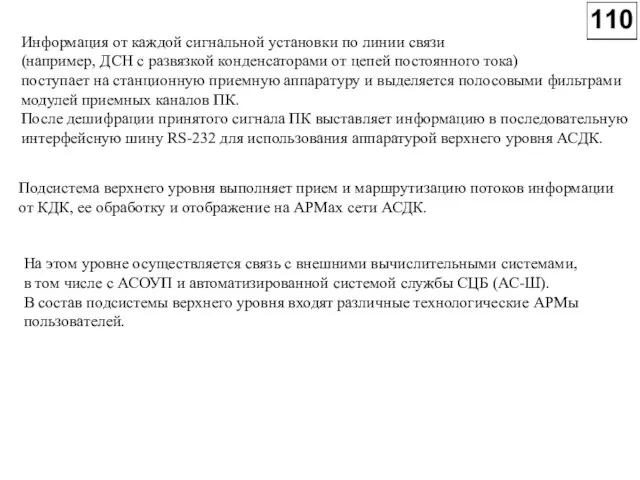
- 7. Информация от каждой сигнальной установки по линии связи (например, ДСН с развязкой конденсаторами от цепей постоянного
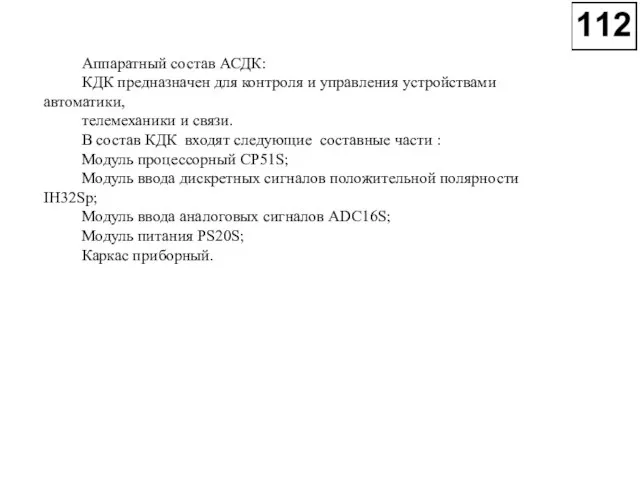
- 8. Аппаратный состав АСДК: КДК предназначен для контроля и управления устройствами автоматики, телемеханики и связи. В состав
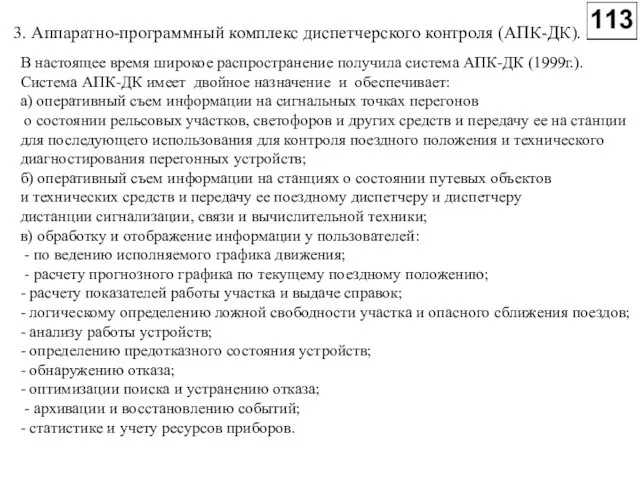
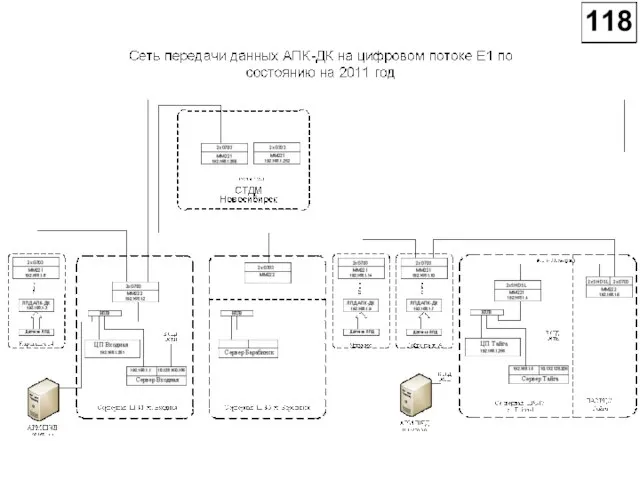
- 10. 3. Аппаратно-программный комплекс диспетчерского контроля (АПК-ДК). В настоящее время широкое распространение получила система АПК-ДК (1999г.). Система
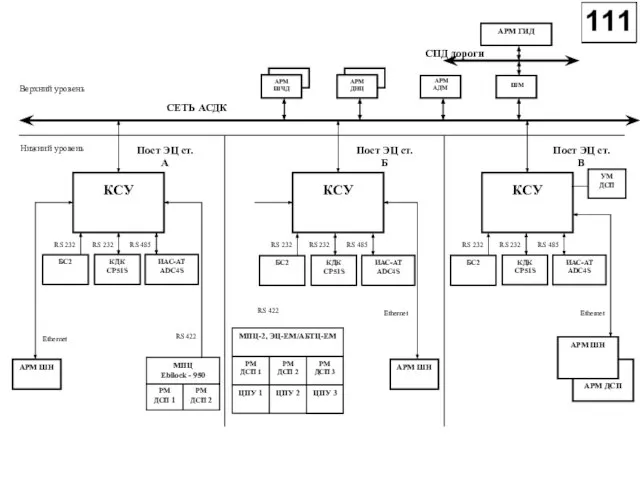
- 11. Структурная схема АПК-ДК
- 12. Система АПК-ДК построена по иерархическому принципу. Состоит из трех подсистем, реализуемых с использованием программируемых контроллеров, персональных
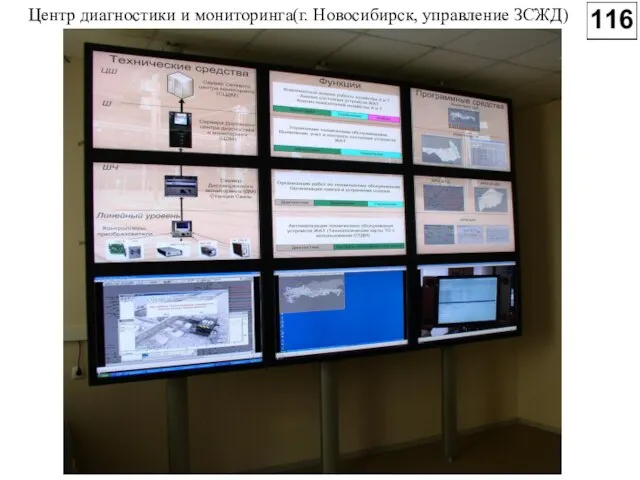
- 13. Центр диагностики и мониторинга(г. Новосибирск, управление ЗСЖД)
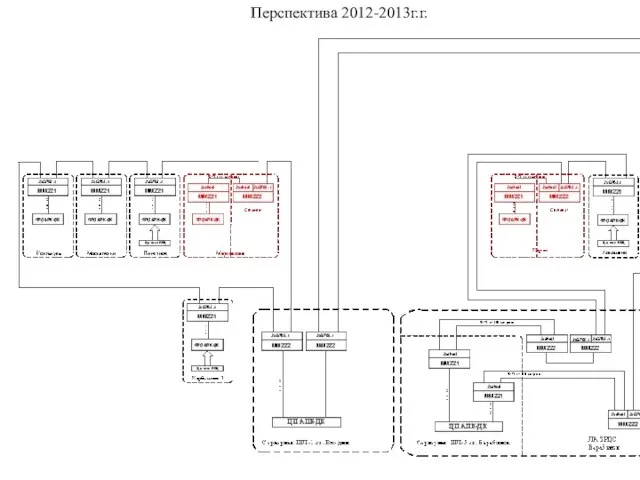
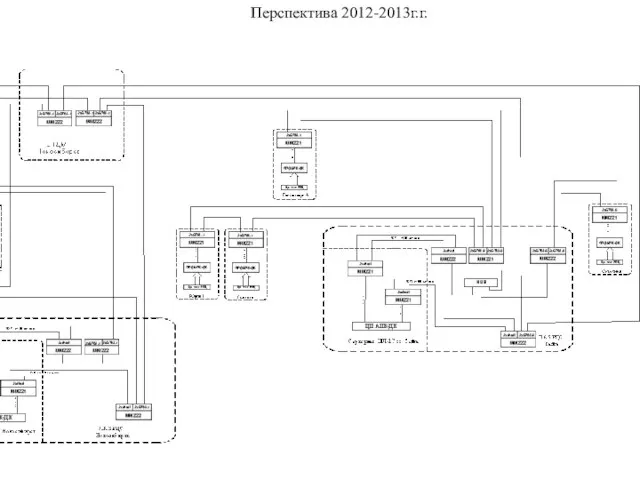
- 17. Перспектива 2012-2013г.г.
- 18. Перспектива 2012-2013г.г.
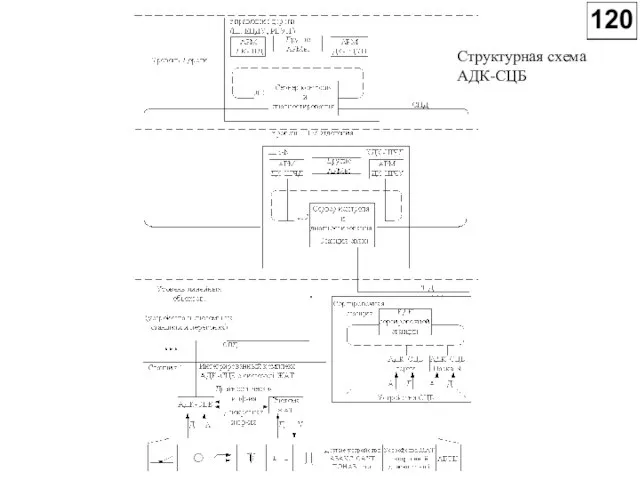
- 19. 5. Система автоматизации диагностирования и контроля устройств СЦБ (АДК-СЦБ) АДК-СЦБ предназначена для ввода, обработки и отображения
- 20. Структурная схема АДК-СЦБ
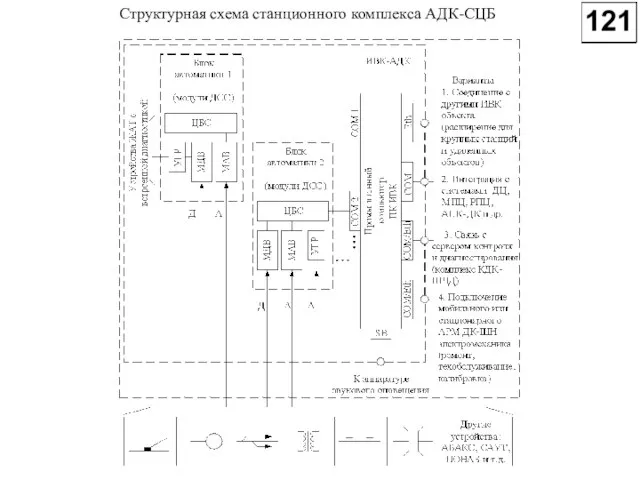
- 21. Структурная схема станционного комплекса АДК-СЦБ
- 22. Станционный комплекс содержит: 1.) модуль центрального блока связи (ЦБС); 2) модуль дискретного ввода (МДВ), предназначенный для
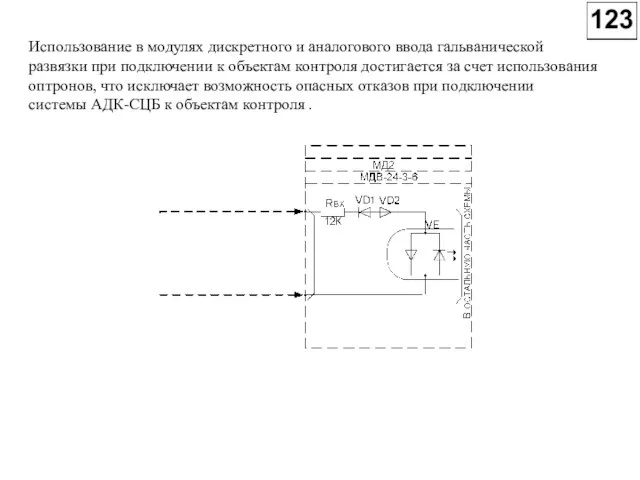
- 23. Использование в модулях дискретного и аналогового ввода гальванической развязки при подключении к объектам контроля достигается за
- 24. Системы АиТ на переездах Переездом называется пересечение железной дороги с дорогами других типов: шоссе, трассы и
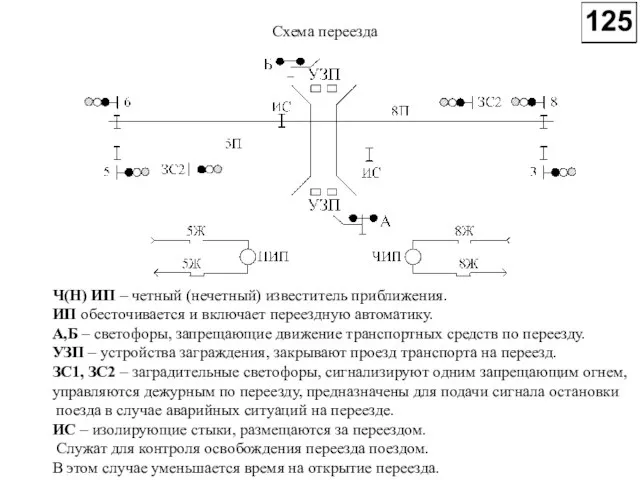
- 25. Ч(Н) ИП – четный (нечетный) известитель приближения. ИП обесточивается и включает переездную автоматику. А,Б – светофоры,
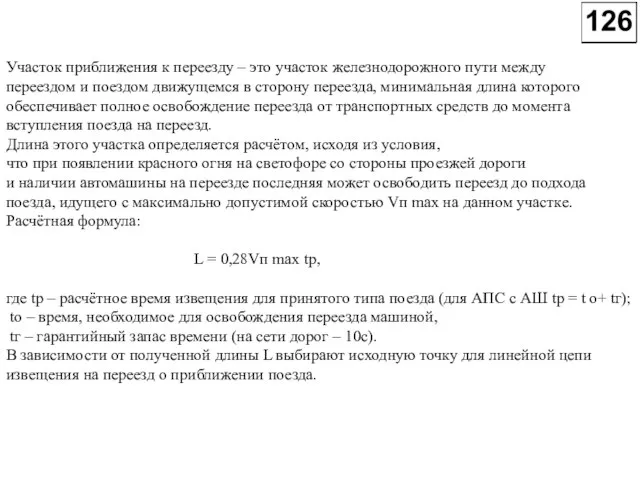
- 26. Участок приближения к переезду – это участок железнодорожного пути между переездом и поездом движущемся в сторону
- 27. Структурная схема ограждающих устройств на переезде.
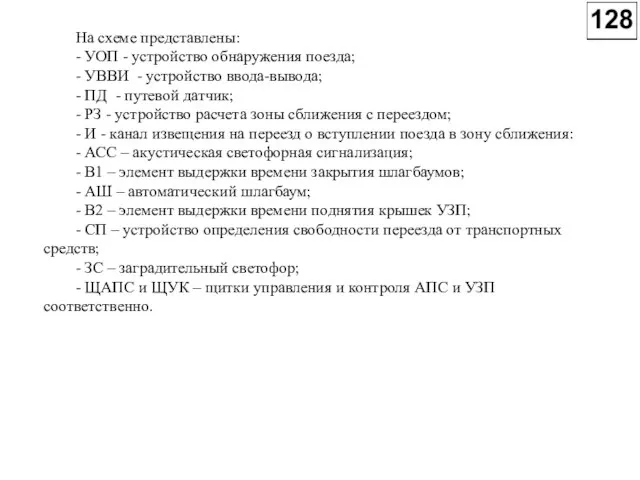
- 28. На схеме представлены: - УОП - устройство обнаружения поезда; - УВВИ - устройство ввода-вывода; - ПД
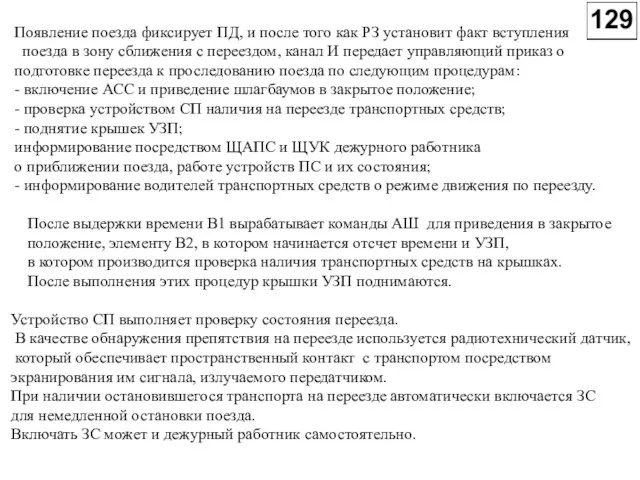
- 29. Появление поезда фиксирует ПД, и после того как РЗ установит факт вступления поезда в зону сближения
- 33. Скачать презентацию
Слайд 2Основным принципом информационного обеспечения СПД-ЛП является создание
комплексной единой базы данных, отображающей
Основным принципом информационного обеспечения СПД-ЛП является создание
комплексной единой базы данных, отображающей

Слайд 3Система передачи данных организуется с использованием имеющихся каналов
тональной частоты (ТЧ) и
Система передачи данных организуется с использованием имеющихся каналов
тональной частоты (ТЧ) и
Слайд 4АСДК представляет собой аппаратно-программный комплекс, обеспечивающий
диспетчерский контроль состояния отдельных узлов и
АСДК представляет собой аппаратно-программный комплекс, обеспечивающий
диспетчерский контроль состояния отдельных узлов и
Слайд 6Аппаратура нижнего уровня содержит:
а) модуль линейный аналоговый (МАЛ), предназначенный для сбора и
Аппаратура нижнего уровня содержит:
а) модуль линейный аналоговый (МАЛ), предназначенный для сбора и
Слайд 7Информация от каждой сигнальной установки по линии связи
(например, ДСН с развязкой
Информация от каждой сигнальной установки по линии связи
(например, ДСН с развязкой
Слайд 8Аппаратный состав АСДК:
КДК предназначен для контроля и управления устройствами автоматики,
телемеханики и
Аппаратный состав АСДК:
КДК предназначен для контроля и управления устройствами автоматики,
телемеханики и
Слайд 103. Аппаратно-программный комплекс диспетчерского контроля (АПК-ДК).
В настоящее время широкое распространение получила система
3. Аппаратно-программный комплекс диспетчерского контроля (АПК-ДК).
В настоящее время широкое распространение получила система
Слайд 11Структурная схема АПК-ДК
Структурная схема АПК-ДК
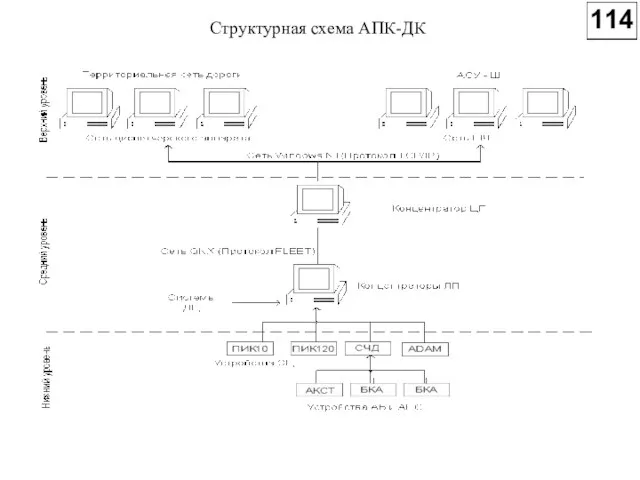
Слайд 12Система АПК-ДК построена по иерархическому принципу.
Состоит из трех подсистем, реализуемых с
Система АПК-ДК построена по иерархическому принципу.
Состоит из трех подсистем, реализуемых с
Слайд 13Центр диагностики и мониторинга(г. Новосибирск, управление ЗСЖД)
Центр диагностики и мониторинга(г. Новосибирск, управление ЗСЖД)

Слайд 17Перспектива 2012-2013г.г.
Перспектива 2012-2013г.г.
Слайд 18Перспектива 2012-2013г.г.
Перспектива 2012-2013г.г.
Слайд 195. Система автоматизации диагностирования и контроля устройств СЦБ (АДК-СЦБ)
АДК-СЦБ предназначена для
5. Система автоматизации диагностирования и контроля устройств СЦБ (АДК-СЦБ)
АДК-СЦБ предназначена для
Слайд 20Структурная схема
АДК-СЦБ
Структурная схема
АДК-СЦБ
Слайд 21Структурная схема станционного комплекса АДК-СЦБ
Структурная схема станционного комплекса АДК-СЦБ
Слайд 22Станционный комплекс содержит:
1.) модуль центрального блока связи (ЦБС);
2) модуль дискретного ввода (МДВ),
Станционный комплекс содержит:
1.) модуль центрального блока связи (ЦБС);
2) модуль дискретного ввода (МДВ),
Слайд 23Использование в модулях дискретного и аналогового ввода гальванической
развязки при подключении к
Использование в модулях дискретного и аналогового ввода гальванической
развязки при подключении к
Слайд 24Системы АиТ на переездах
Переездом называется пересечение железной дороги с дорогами других типов:
Системы АиТ на переездах
Переездом называется пересечение железной дороги с дорогами других типов:
Слайд 25Ч(Н) ИП – четный (нечетный) известитель приближения.
ИП обесточивается и включает переездную
Ч(Н) ИП – четный (нечетный) известитель приближения.
ИП обесточивается и включает переездную
Слайд 26Участок приближения к переезду – это участок железнодорожного пути между
переездом и
Участок приближения к переезду – это участок железнодорожного пути между
переездом и
Слайд 27Структурная схема ограждающих устройств на переезде.
Структурная схема ограждающих устройств на переезде.

Слайд 28На схеме представлены:
- УОП - устройство обнаружения поезда;
- УВВИ - устройство ввода-вывода;
-
На схеме представлены:
- УОП - устройство обнаружения поезда;
- УВВИ - устройство ввода-вывода;
-
Слайд 29Появление поезда фиксирует ПД, и после того как РЗ установит факт вступления
Появление поезда фиксирует ПД, и после того как РЗ установит факт вступления

 Массовые дистанционные образовательные конкурсы для детей и педагогов
Массовые дистанционные образовательные конкурсы для детей и педагогов ООП Java. Продолжение
ООП Java. Продолжение Меню. Возможность выбора. 5 класс
Меню. Возможность выбора. 5 класс Графы. Поиск циклов. Определение предков в дереве
Графы. Поиск циклов. Определение предков в дереве Открытые вопросы и вызовы онлайн-образования: мир опять придется спасать айтишникам
Открытые вопросы и вызовы онлайн-образования: мир опять придется спасать айтишникам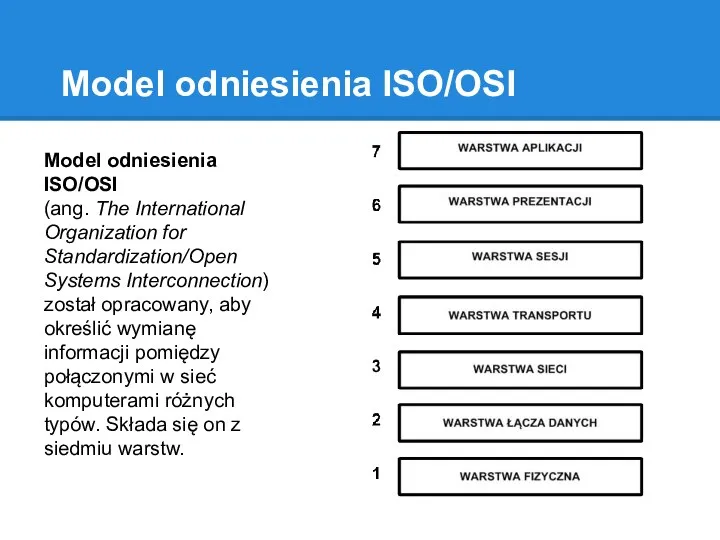 Model odniesienia ISO/OSI
Model odniesienia ISO/OSI Что такое система. Информационные процессы
Что такое система. Информационные процессы Структура программы
Структура программы Ориентированный граф
Ориентированный граф Компьютерные технологии
Компьютерные технологии Работа в сети Интернет
Работа в сети Интернет Формирование каталога CТЕ для Портал поставщиков
Формирование каталога CТЕ для Портал поставщиков Управление персоналом. Правила подготовки докладов в Power Point
Управление персоналом. Правила подготовки докладов в Power Point Бизнес план интернет-магазина подарков
Бизнес план интернет-магазина подарков Эквивалентное разбиение. Анализ граничных значений
Эквивалентное разбиение. Анализ граничных значений Сетевая безопасность. Основные понятия. Типы и примеры атак
Сетевая безопасность. Основные понятия. Типы и примеры атак Разработка информационного ресурса для сети аптек Вита
Разработка информационного ресурса для сети аптек Вита Разработка программного обеспечения ИС Контроль содержания городских территорий
Разработка программного обеспечения ИС Контроль содержания городских территорий 3D моделирование
3D моделирование Базовое наполнение помещения
Базовое наполнение помещения Платформа планирования и оптимизации Oracle RPAS
Платформа планирования и оптимизации Oracle RPAS Табличные модели
Табличные модели 2._Работа_с_файловой_системой
2._Работа_с_файловой_системой Основы программирования_ветвление (Python)
Основы программирования_ветвление (Python) Параграф 1.3
Параграф 1.3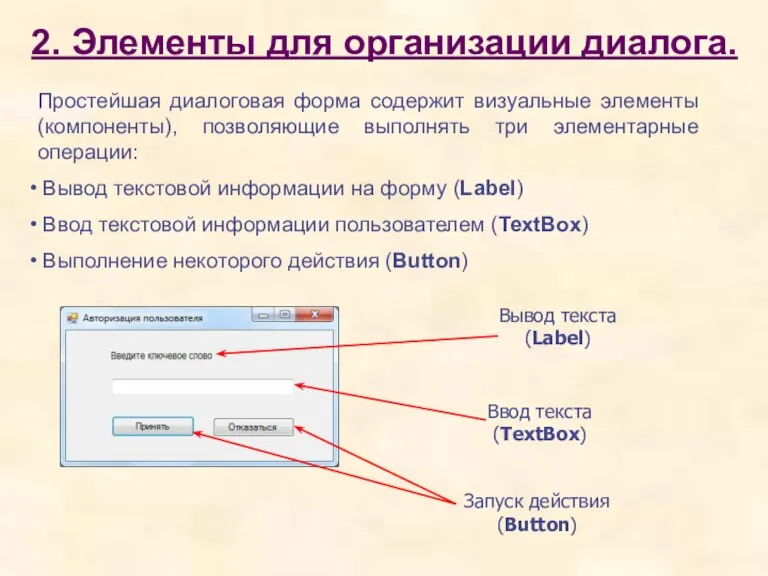 организация диалога с пользователем
организация диалога с пользователем Все события в одном мобильном приложении
Все события в одном мобильном приложении Презентация на тему Microsoft Word
Презентация на тему Microsoft Word