- Создание бионического протеза руки с минимальной стоимостью и максимальным функционалом

Содержание
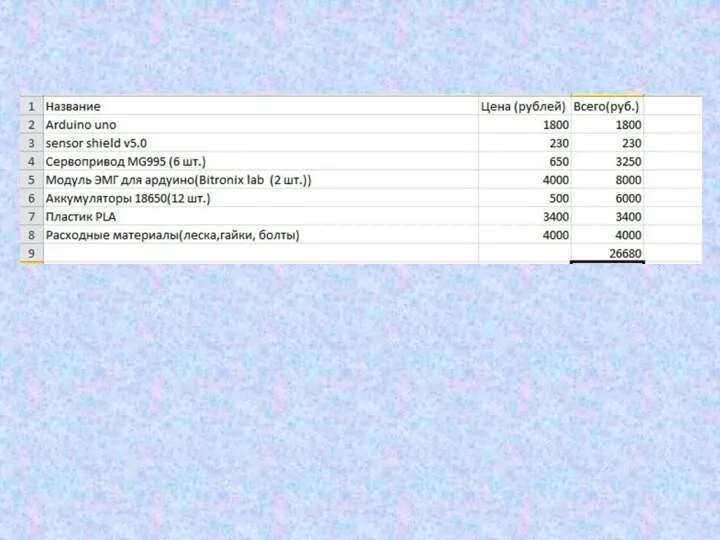
- 2. Цель: создать прототип бионического протеза руки с минимальной стоимостью и с максимальным функционалом . Задачи: 1.Узнать
- 3. Литературный обзор Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет считывания специальными мио-датчиками электрического
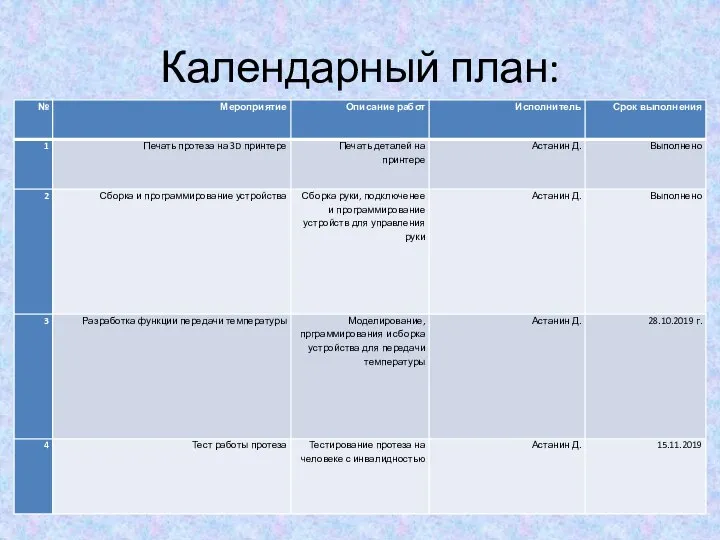
- 4. Календарный план:
- 6. Реализация проекта 1.Моделирование протеза 2.Печать и сборка протеза 3.Программирование протеза
- 10. Заключение: В ходе создания своего протеза, я узнал о видах протезов, функциях, а так же о
- 12. Скачать презентацию
Слайд 3Литературный обзор
Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет считывания
Литературный обзор
Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет считывания

Слайд 4Календарный план:
Календарный план:
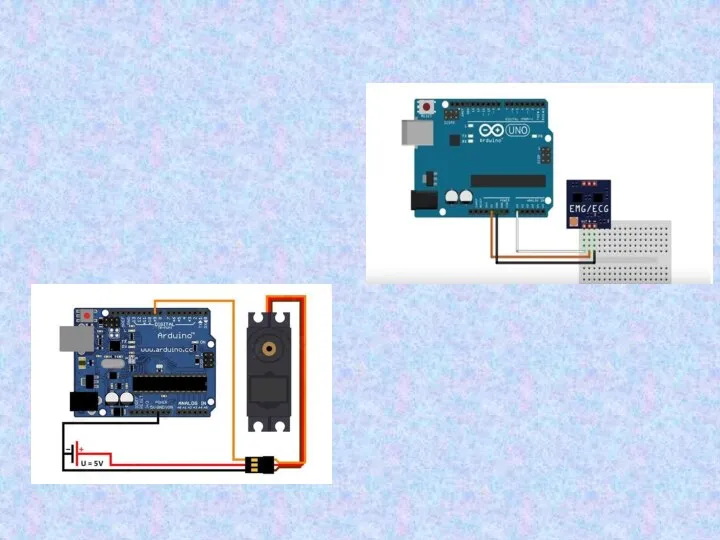
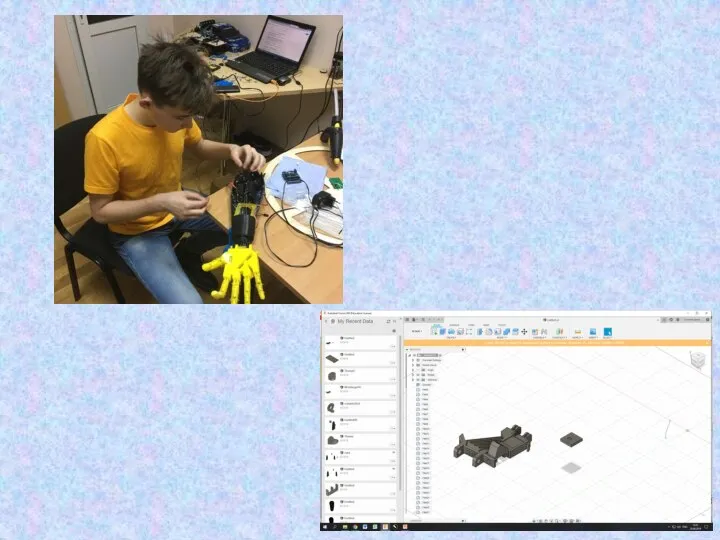
Слайд 6Реализация проекта
1.Моделирование протеза
2.Печать и сборка протеза
3.Программирование протеза
Реализация проекта
1.Моделирование протеза
2.Печать и сборка протеза
3.Программирование протеза
Слайд 10Заключение:
В ходе создания своего протеза, я узнал о видах протезов, функциях, а
Заключение:
В ходе создания своего протеза, я узнал о видах протезов, функциях, а
 Практические возможности графического редактора Paint
Практические возможности графического редактора Paint IBD_Ischenko10B
IBD_Ischenko10B Горячие клавиши
Горячие клавиши Информация и её измерение
Информация и её измерение Что такое мультимедиа
Что такое мультимедиа Компьютерное проектирование
Компьютерное проектирование Основы цифровой компетентности и безопасности в сети интернет
Основы цифровой компетентности и безопасности в сети интернет Создание компьютерной игры – визуальная новелла
Создание компьютерной игры – визуальная новелла Мои улучшения в играх
Мои улучшения в играх Особенности решения задач ЕГЭ на языке Python. Часть 2
Особенности решения задач ЕГЭ на языке Python. Часть 2 История развития вычислительной техники
История развития вычислительной техники Senler. Регулярные выражения в ключевом слове
Senler. Регулярные выражения в ключевом слове 3D моделирование
3D моделирование Порядок перезаписи в Навигаторе дополнительного образования
Порядок перезаписи в Навигаторе дополнительного образования SQLXML. Синтаксис XMLFOREST
SQLXML. Синтаксис XMLFOREST Самарская областная библиотека для слепых - эффективная организация информационного пространства
Самарская областная библиотека для слепых - эффективная организация информационного пространства Прикладное программное обеспечение для анализа рынка на основе данных социальных сетей
Прикладное программное обеспечение для анализа рынка на основе данных социальных сетей Методология , структура и преимущество ERP – систем, смысл новой идеологии CSRP, расширенное управление
Методология , структура и преимущество ERP – систем, смысл новой идеологии CSRP, расширенное управление Технология мультимедиа
Технология мультимедиа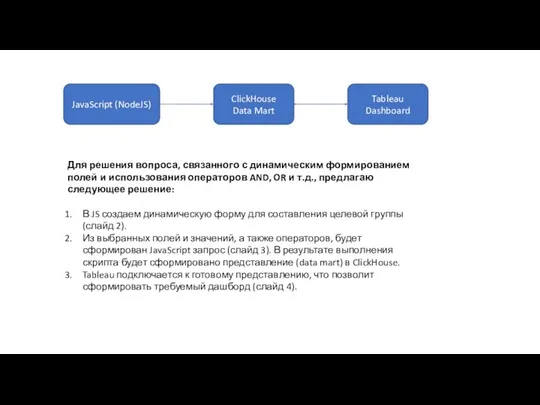 Дмнамическое формирование полей
Дмнамическое формирование полей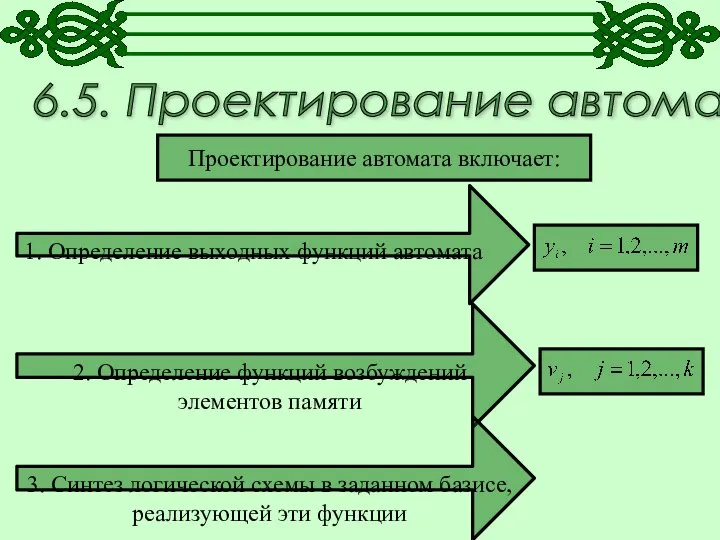 Проектирование автомата
Проектирование автомата YouTube как источник знаний о продуктах MS Office
YouTube как источник знаний о продуктах MS Office Цифровая (Digital) иллюстрация
Цифровая (Digital) иллюстрация Зарядка для глаз
Зарядка для глаз 1_Архитектура ИС_Общие понятия ч.1
1_Архитектура ИС_Общие понятия ч.1 Обpаботка символов и стpок средствами языка Турбо-Паскаль
Обpаботка символов и стpок средствами языка Турбо-Паскаль Основы логики
Основы логики Сервис Datcom.kz, подписание документов электронной цифровой подписью
Сервис Datcom.kz, подписание документов электронной цифровой подписью