- Инструментальные средства работы с графической информацией. Лекция 3

Содержание
- 2. Лекция 3 Преобразование координат
- 3. Координатный метод был введен в XVII веке французскими математиками Р.Декартом и П.Ферма каждая точка (пиксел) на
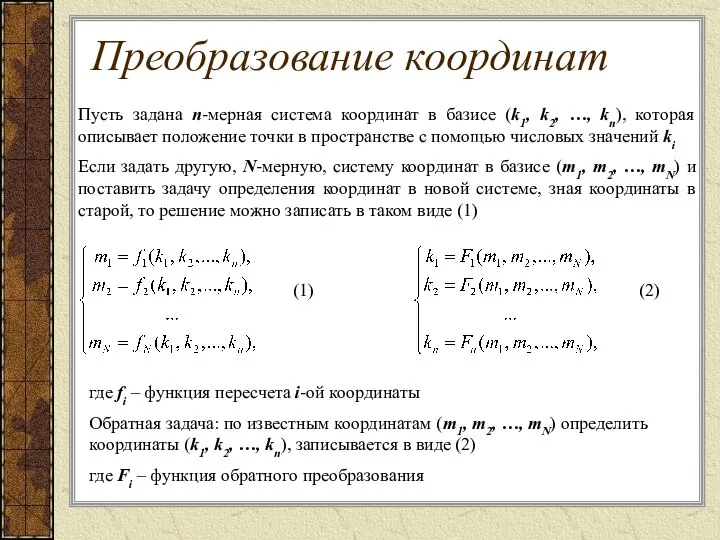
- 4. Пусть задана n-мерная система координат в базисе (k1, k2, …, kn), которая описывает положение точки в
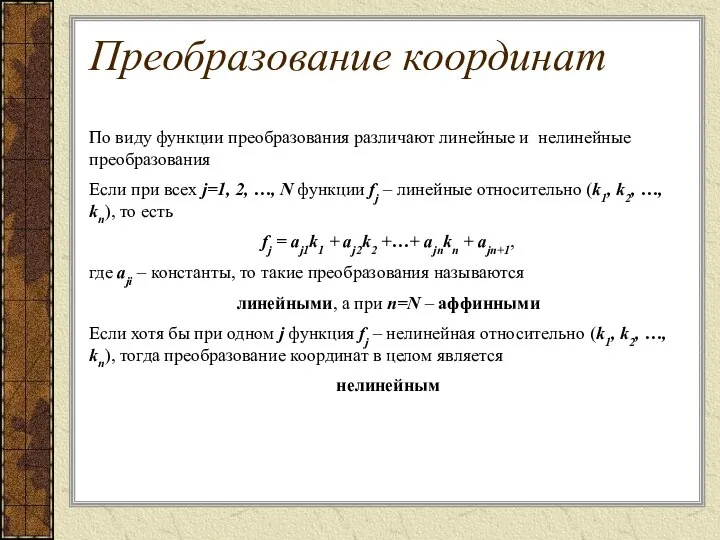
- 5. По виду функции преобразования различают линейные и нелинейные преобразования Если при всех j=1, 2, …, N
- 6. Линейные преобразования наглядно записываются в матричной форме т.е. матрица коэффициентов aij умножается на матрицу-столбец ki, и
- 7. Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование на плоскости описывается формулами где A, B, …,
- 8. 1. Параллельный сдвиг координат 0 dx x dy y 0 X Y В матричной форме: Обратное
- 9. 2. Растяжение-сжатие осей координат 0 x X y Y В матричной форме: Обратное преобразование: Аффинные преобразования
- 10. 3. Поворот В матричной форме: Обратное преобразование: y Y X x P α Аффинные преобразования на
- 11. В общем виде записываются где A, B, …, N – константы В матричном виде . Трехмерные
- 12. . 1. Сдвиг осей координат соответственно на dx, dy, dz: 2. Растяжение/сжатие на kx, ky, kz:
- 13. . 3. Повороты – в трехмерном пространстве существует больше разновидностей поворота, сравнительно с двумерным пространством Поворот
- 15. Скачать презентацию
Слайд 3Координатный метод был введен в XVII веке французскими математиками Р.Декартом и П.Ферма
Координатный метод был введен в XVII веке французскими математиками Р.Декартом и П.Ферма
Слайд 4Пусть задана n-мерная система координат в базисе (k1, k2, …, kn), которая
Пусть задана n-мерная система координат в базисе (k1, k2, …, kn), которая
Слайд 5По виду функции преобразования различают линейные и нелинейные преобразования
Если при всех j=1,
По виду функции преобразования различают линейные и нелинейные преобразования
Если при всех j=1,
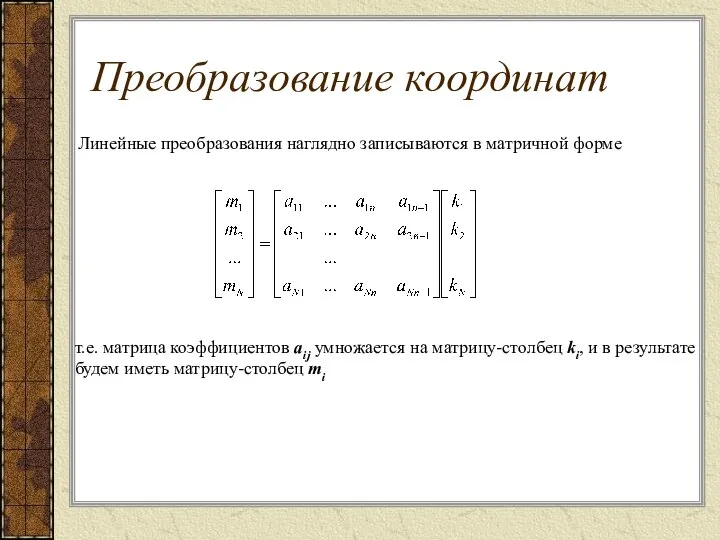
Слайд 6Линейные преобразования наглядно записываются в матричной форме
т.е. матрица коэффициентов aij умножается на
Линейные преобразования наглядно записываются в матричной форме
т.е. матрица коэффициентов aij умножается на
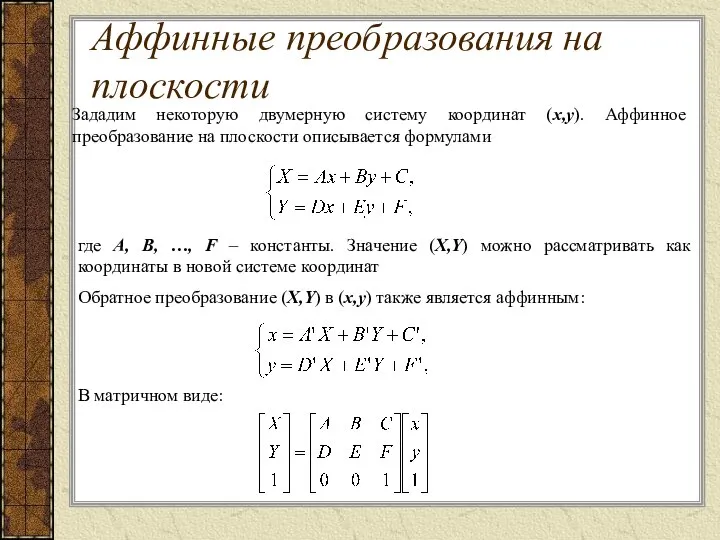
Слайд 7Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование на плоскости описывается формулами
где
Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование на плоскости описывается формулами
где
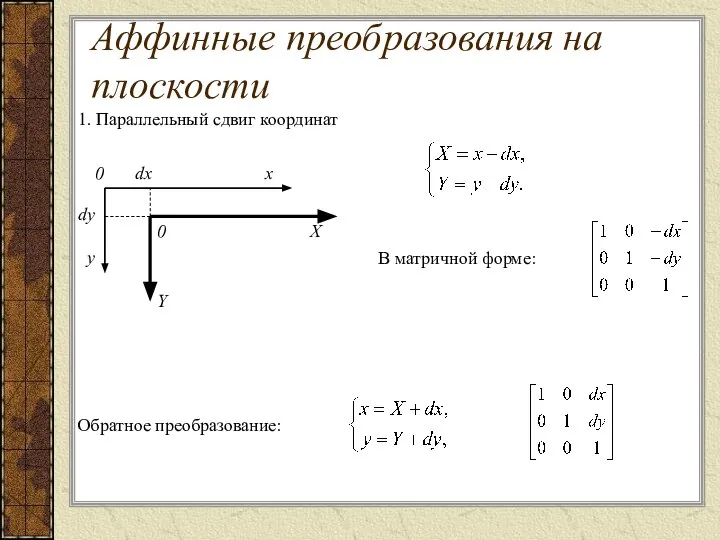
Слайд 81. Параллельный сдвиг координат
0 dx x
dy
y
0 X
Y
В матричной форме:
Обратное преобразование:
Аффинные преобразования на
1. Параллельный сдвиг координат
0 dx x
dy
y
0 X
Y
В матричной форме:
Обратное преобразование:
Аффинные преобразования на
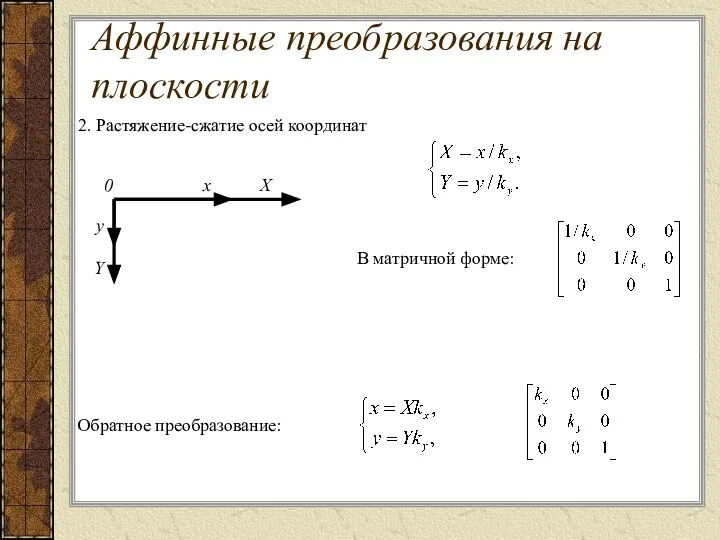
Слайд 92. Растяжение-сжатие осей координат
0 x X
y
Y
В матричной форме:
Обратное преобразование:
Аффинные преобразования на плоскости
2. Растяжение-сжатие осей координат
0 x X
y
Y
В матричной форме:
Обратное преобразование:
Аффинные преобразования на плоскости
Слайд 103. Поворот
В матричной форме:
Обратное преобразование:
y
Y
X
x
P
α
Аффинные преобразования на плоскости
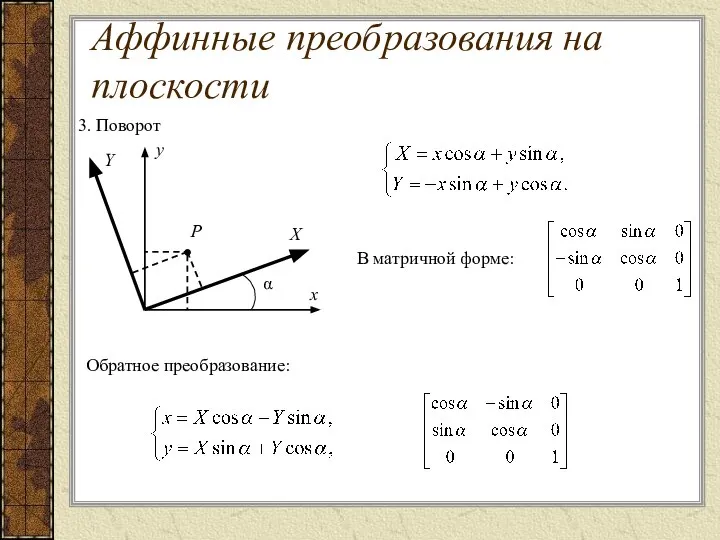
3. Поворот
В матричной форме:
Обратное преобразование:
y
Y
X
x
P
α
Аффинные преобразования на плоскости
Слайд 11В общем виде записываются
где A, B, …, N – константы
В матричном виде
.
Трехмерные
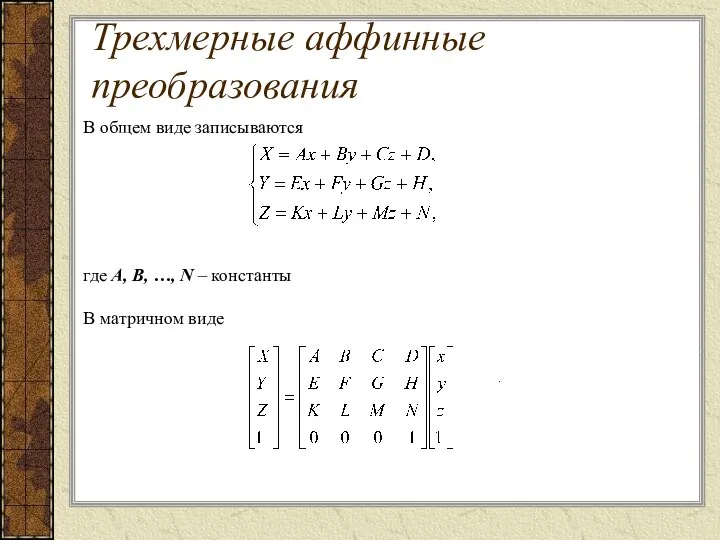
В общем виде записываются
где A, B, …, N – константы
В матричном виде
.
Трехмерные
Слайд 12.
1. Сдвиг осей координат соответственно на dx, dy, dz:
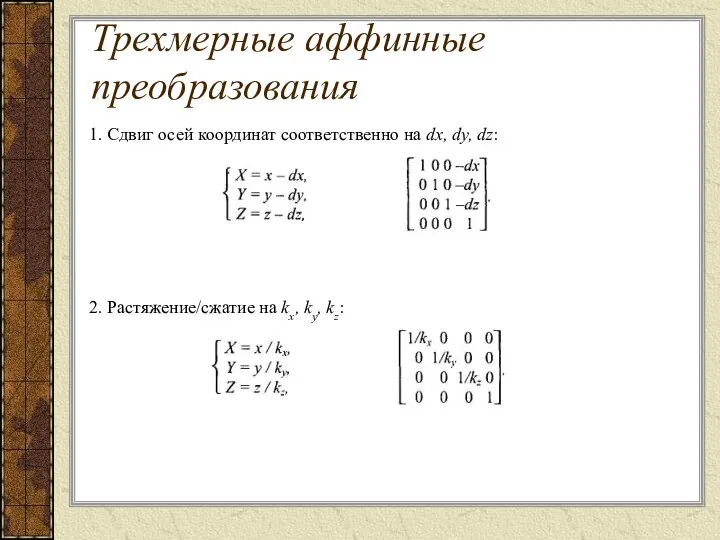
2. Растяжение/сжатие на kx,
.
1. Сдвиг осей координат соответственно на dx, dy, dz:
2. Растяжение/сжатие на kx,
Слайд 13.
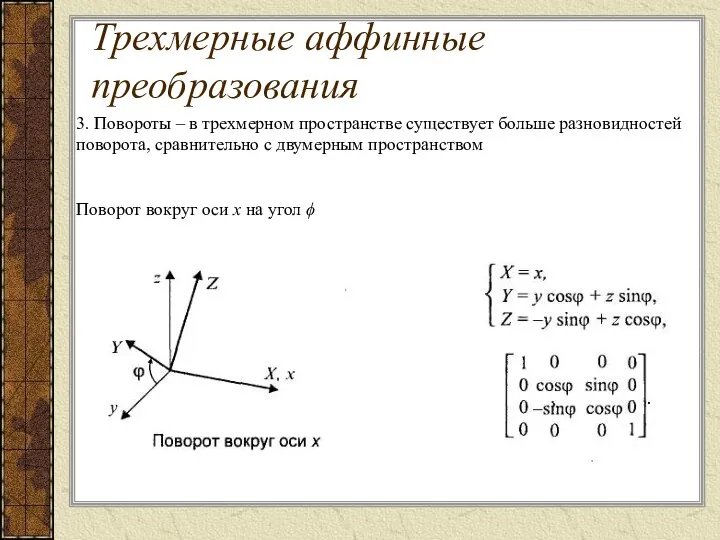
3. Повороты – в трехмерном пространстве существует больше разновидностей поворота, сравнительно с
.
3. Повороты – в трехмерном пространстве существует больше разновидностей поворота, сравнительно с
 Система географических координат
Система географических координат Обыкновенные дроб
Обыкновенные дроб Дифференциальные уравнения
Дифференциальные уравнения Перпендикулярность двух плоскостей
Перпендикулярность двух плоскостей Построение аксонометрических проекций геометрических фигур и тел
Построение аксонометрических проекций геометрических фигур и тел Прямая. Плоскость
Прямая. Плоскость Определение производной функции
Определение производной функции Поиск сокровищ. Изучений геометрических фигур
Поиск сокровищ. Изучений геометрических фигур Развертка поверхностей геометрических тел
Развертка поверхностей геометрических тел Решение задач с помощью уравнений
Решение задач с помощью уравнений Приведите примеры применения линейной функции в смежных предметах
Приведите примеры применения линейной функции в смежных предметах 5 сказочных загадок по математике
5 сказочных загадок по математике Формула полной вероятности и Байеса
Формула полной вероятности и Байеса Интеллектуальный марафон
Интеллектуальный марафон Периметр и площадь прямоугольника
Периметр и площадь прямоугольника Кут. Вимірювання кутів. Рівність кутів. Бісектриса кута
Кут. Вимірювання кутів. Рівність кутів. Бісектриса кута Корреляционное моделирование
Корреляционное моделирование Треугольник Паскаля
Треугольник Паскаля Прямоугольник
Прямоугольник Алгоритмы направленного перебора
Алгоритмы направленного перебора Построение косинуса
Построение косинуса Решаем задачи
Решаем задачи Стереометрия. Многогранники
Стереометрия. Многогранники Построение графика квадратичной функции
Построение графика квадратичной функции Экологические понятия в математике
Экологические понятия в математике Взаимное расположение сферы и плоскости
Взаимное расположение сферы и плоскости Признак перпендикулярности прямой и плоскости
Признак перпендикулярности прямой и плоскости Нахождение корней уравнения с помощью подбора параметра
Нахождение корней уравнения с помощью подбора параметра