- Коррекция нелинейных систем

Содержание
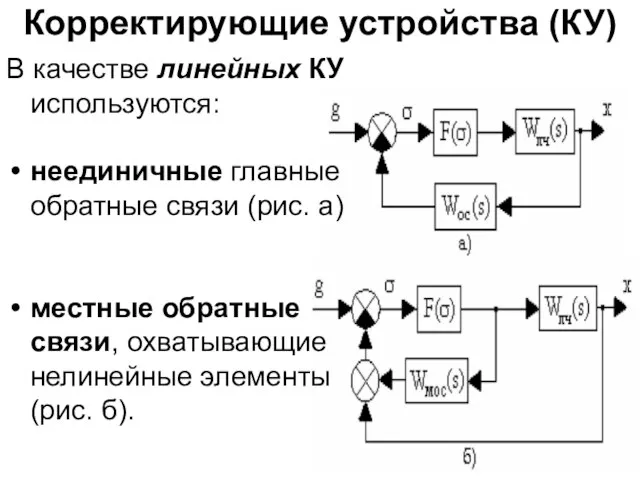
- 2. Корректирующие устройства (КУ) В качестве линейных КУ используются: неединичные главные обратные связи (рис. а) местные обратные
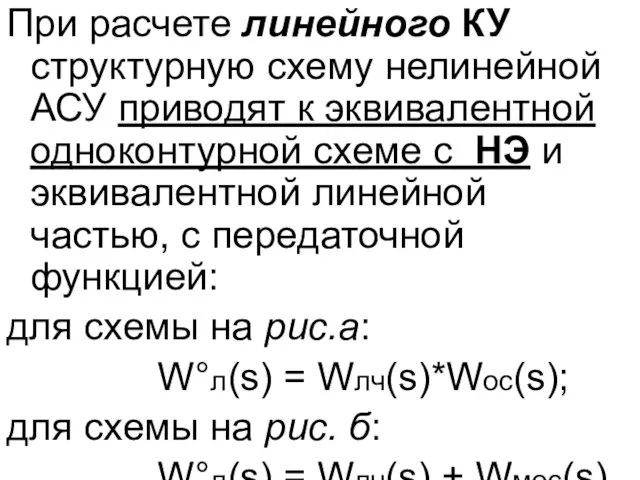
- 3. При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной схеме с НЭ и
- 4. Компенсация влияния нелинейности (нелинейные КУ) Позволяет рассматривать нелинейную АСУ как линейную относительно определенных входных воздействий. В
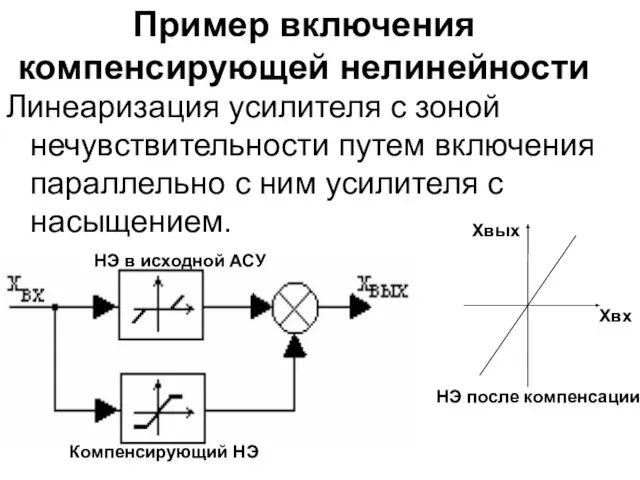
- 5. Пример включения компенсирующей нелинейности Линеаризация усилителя с зоной нечувствительности путем включения параллельно с ним усилителя с
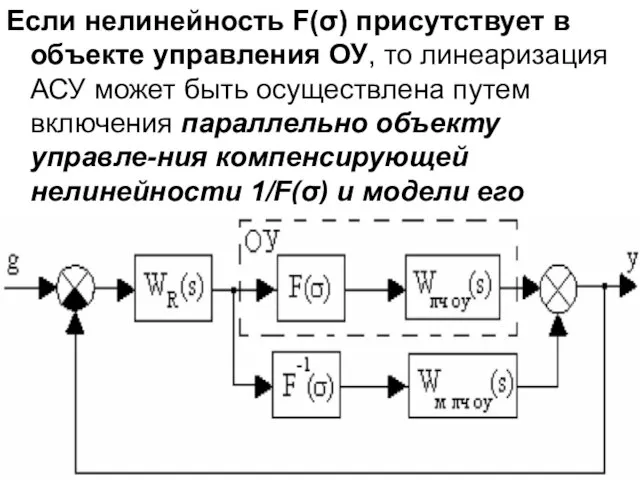
- 6. Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может быть осуществлена путем включения
- 7. Вибрационная компенсация нелинейностей НЭ проявляет себя как линейный, если на его вход вместе с полезным медленно
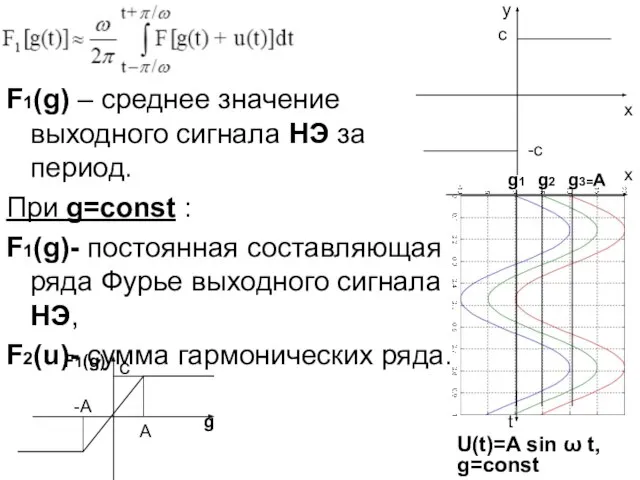
- 8. F1(g) – среднее значение выходного сигнала НЭ за период. При g=const : F1(g)- постоянная составляющая ряда
- 9. В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A. Чем больше A компенсирующих колебаний
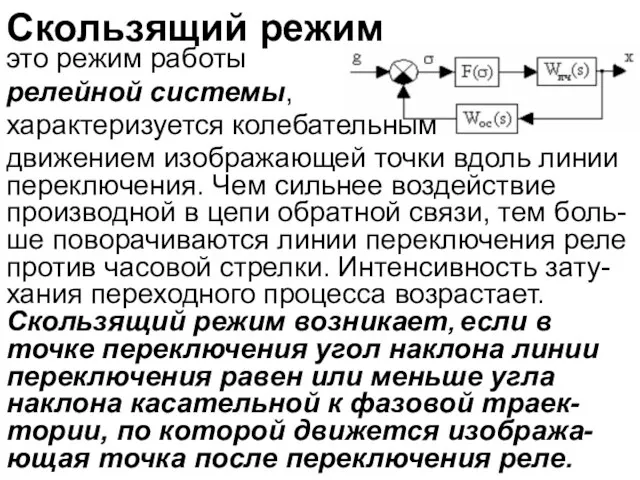
- 10. Скользящий режим это режим работы релейной системы, характеризуется колебательным движением изображающей точки вдоль линии переключения. Чем
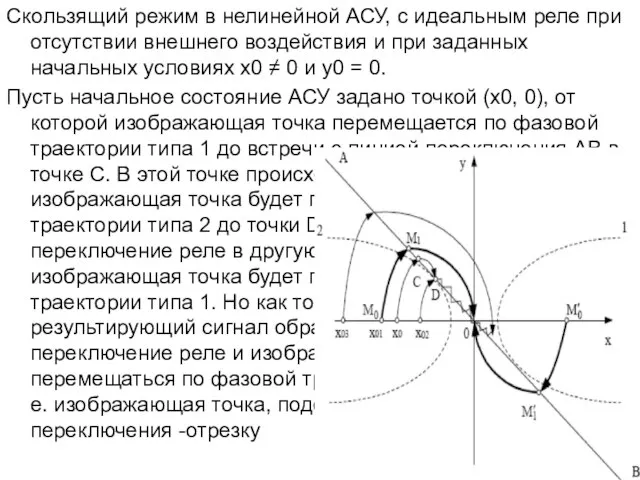
- 11. Скользящий режим в нелинейной АСУ, с идеальным реле при отсутствии внешнего воздействия и при заданных начальных
- 13. Скачать презентацию
Слайд 2Корректирующие устройства (КУ)
В качестве линейных КУ используются:
неединичные главные обратные связи (рис. а)
местные
Корректирующие устройства (КУ)
В качестве линейных КУ используются:
неединичные главные обратные связи (рис. а)
местные
Слайд 3При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной
При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной
Слайд 4Компенсация влияния нелинейности (нелинейные КУ)
Позволяет рассматривать нелинейную АСУ как линейную относительно определенных
Компенсация влияния нелинейности (нелинейные КУ)
Позволяет рассматривать нелинейную АСУ как линейную относительно определенных
Слайд 5Пример включения компенсирующей нелинейности
Линеаризация усилителя с зоной нечувствительности путем включения параллельно с
Пример включения компенсирующей нелинейности
Линеаризация усилителя с зоной нечувствительности путем включения параллельно с
Слайд 6Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может
Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может
Слайд 7Вибрационная компенсация нелинейностей
НЭ проявляет себя как линейный, если на его вход вместе
Вибрационная компенсация нелинейностей
НЭ проявляет себя как линейный, если на его вход вместе

Слайд 8F1(g) – среднее значение выходного сигнала НЭ за период.
При g=const :
F1(g) – среднее значение выходного сигнала НЭ за период.
При g=const :
Слайд 9В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A.
Чем
В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A.
Чем
Слайд 10Скользящий режим
это режим работы
релейной системы,
характеризуется колебательным
движением изображающей точки вдоль
Скользящий режим
это режим работы
релейной системы,
характеризуется колебательным
движением изображающей точки вдоль
Слайд 11Скользящий режим в нелинейной АСУ, с идеальным реле при отсутствии внешнего воздействия
Скользящий режим в нелинейной АСУ, с идеальным реле при отсутствии внешнего воздействия
 Линейная алгебра
Линейная алгебра Свойства логарифмов
Свойства логарифмов Неравенства вида Cos〖x≤a〗
Неравенства вида Cos〖x≤a〗 Тригонометрические уравнения. Устный счет
Тригонометрические уравнения. Устный счет Презентация на тему Буквенная запись свойств сложения и вычитания (5 класс)
Презентация на тему Буквенная запись свойств сложения и вычитания (5 класс)  Презентация на тему Свойства и график функции синус
Презентация на тему Свойства и график функции синус  Закрепление решения задач на приведение к единице
Закрепление решения задач на приведение к единице Логические и традиционные головоломки
Логические и традиционные головоломки Развёртка, как основа объёмной конструкции
Развёртка, как основа объёмной конструкции Презентация на тему Пропорции
Презентация на тему Пропорции  Игра-тренажёр Уроки с Мальвиной. Табличное умножение и деление
Игра-тренажёр Уроки с Мальвиной. Табличное умножение и деление Углы
Углы Мир многогранников
Мир многогранников Нахождение общего количества единиц определённого разряда в данном числе
Нахождение общего количества единиц определённого разряда в данном числе Прямоугольная система координат в пространстве
Прямоугольная система координат в пространстве Площадь круга. Геометрическая сказка. 6 класс
Площадь круга. Геометрическая сказка. 6 класс Презентация на тему ПОСТРОЕНИЕ ГРАФИКА КВАДРАТИЧНОЙ ФУНКЦИИ
Презентация на тему ПОСТРОЕНИЕ ГРАФИКА КВАДРАТИЧНОЙ ФУНКЦИИ  Пирамида. Творческая групповая работа 11класс
Пирамида. Творческая групповая работа 11класс Решение задач на проценты
Решение задач на проценты Теория вероятностей
Теория вероятностей Векторы в пространстве
Векторы в пространстве Сложение и вычитание числа 1
Сложение и вычитание числа 1 Začíname s rovnicami. Riešenie jednoduchých rovníc
Začíname s rovnicami. Riešenie jednoduchých rovníc Сумма углов треугольника
Сумма углов треугольника Разность и её значение
Разность и её значение Математика в моей семье
Математика в моей семье Презентация на тему КВН по математике
Презентация на тему КВН по математике  О математическом языке
О математическом языке