- Нелинейные уравнения и системы нелинейных алгебраических уравнений. Лекция 4

Содержание
- 2. Постановка задачи Рассматривается задача поиска корней уравнения для функции одного переменного Комментарий: подавляющее большинство нелинейных уравнений
- 3. Методы локализации корней Строим график функции Смотрим где приблизительно находится корень и отмечаем этот отрезок Геометрическая
- 4. Деление отрезка пополам Считаем, что задача локализации корней решена и на рассматриваемом отрезке содержится только один
- 5. Метод простых итераций для нелинейного уравнения Исходное уравнение f (x) = 0 заменяется на x =
- 6. Сходимость метода простых итераций Теорема Лагранжа f (x*) ≡ 0 x* = ϕ(x*) x* = ϕ(x*)
- 7. Оценка числа итераций Условие прекращения итераций: Заданная точность Невязка, при начальном приближении: Необходимое число итераций для
- 8. Метод релаксации Вид метода простой итерации при специальном выборе функции ϕ(x). Численная производная по времени В
- 9. Метод релаксации Оценим при каких значениях итерационного параметра ошибка минимальна Пусть тогда Нужно требовать одновременное ограничение
- 10. Метод Ньютона для поиска решения Ищем решение уравнения f (x) = 0, предполагаем, что на n
- 11. Метод Ньютона Теорема (о квадратичной сходимости метода Ньютона): Пусть существуют две ограниченные производные функции f (x)
- 12. Метод Ньютона т.е. Оценим убывание ошибки Таким образом Для сходимости метода Ньютона достаточно, чтобы были выполнены
- 13. Геометрический смысл метода Ньютона Пример: Поиск корня у уравнения начальное приближение x0 = 0.5 Иллюстрация последовательных
- 14. Методы высших порядков Итерационный процесс третьего порядка Как и в методе Ньютона предполагаем, что после n
- 15. Решение систем нелинейных уравнений: аксиомы нормы
- 16. Нормы векторов В вычислительной математике широко распространены следующие нормы: Максимальная или бесконечная норма (иногда используется название
- 17. Нормы матриц Опр.: Матричная норма ||A|| называется согласованной с векторной нормой ||x||, если выполняется неравенство Норма
- 18. Свойства нормы Опр.: Матричная норма ||A|| называется субмультипликативной, если Замечание: если норма ||A|| подчинена какой-либо векторной
- 19. Используемые нормы матриц Определим выражения для норм матриц
- 20. Евклидова норма Воспользуемся связью между евклидовой нормой вектора и скалярным произведением А так же свойством, что
- 21. Решение систем нелинейных уравнений: аксиомы нормы
- 22. Метод простых итераций для систем Для численного решения многомерных систем нелинейных уравнений могут быть использованы только
- 23. Метод простых итераций Доказательство: Поэтому При p > n имеем цепочку неравенств
- 24. Метод простых итераций Поскольку n произвольно, то Замечание: При n = 0 Таким образом все приближения
- 25. Метод простых итераций Доказательство: Пусть выбрано нулевое приближение, а далее Погрешность в k-ой компоненте l –
- 26. Метод Ньютона для систем В этом случае матрица Якоби отличается от матрицы метода простых итераций Для
- 28. Скачать презентацию
Слайд 2Постановка задачи
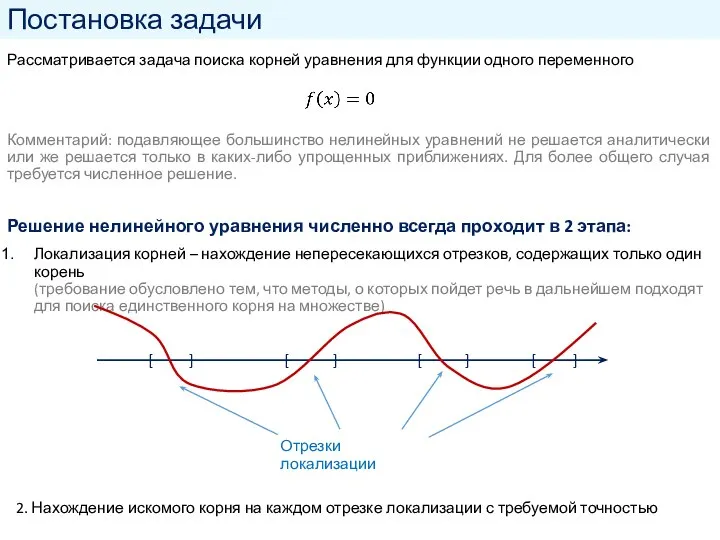
Рассматривается задача поиска корней уравнения для функции одного переменного
Комментарий: подавляющее большинство
Постановка задачи
Рассматривается задача поиска корней уравнения для функции одного переменного
Комментарий: подавляющее большинство
Слайд 3Методы локализации корней
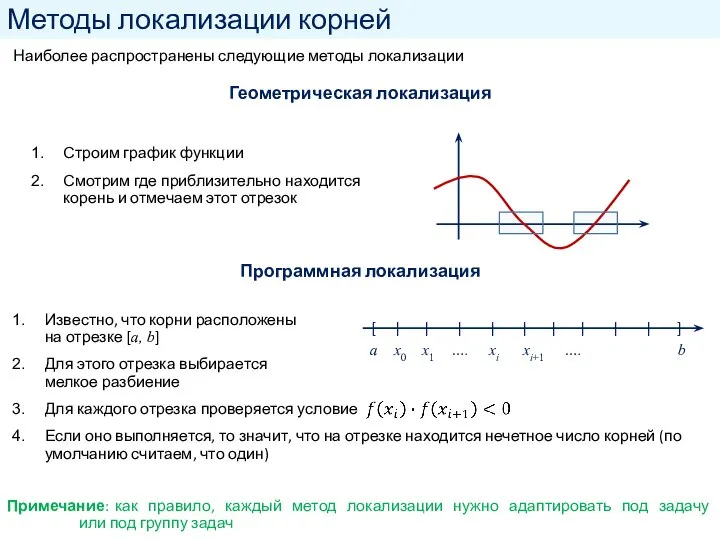
Строим график функции
Смотрим где приблизительно находится корень и отмечаем этот
Методы локализации корней
Строим график функции
Смотрим где приблизительно находится корень и отмечаем этот
Слайд 4Деление отрезка пополам
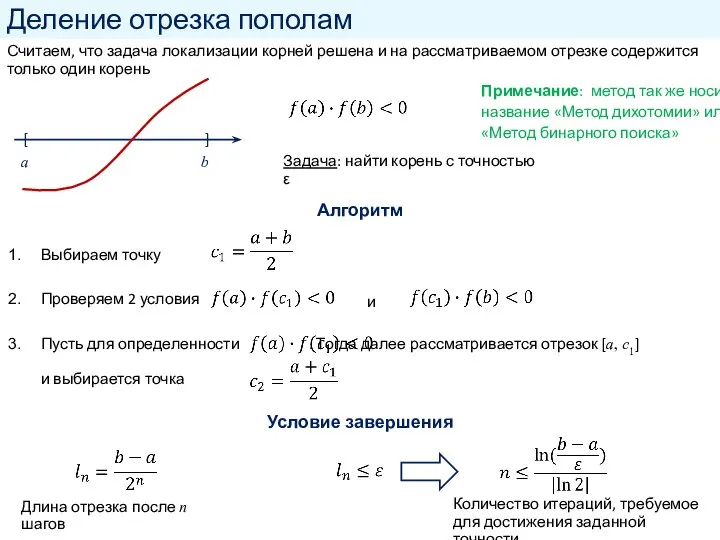
Считаем, что задача локализации корней решена и на рассматриваемом отрезке
Деление отрезка пополам
Считаем, что задача локализации корней решена и на рассматриваемом отрезке
Слайд 5Метод простых итераций для нелинейного уравнения
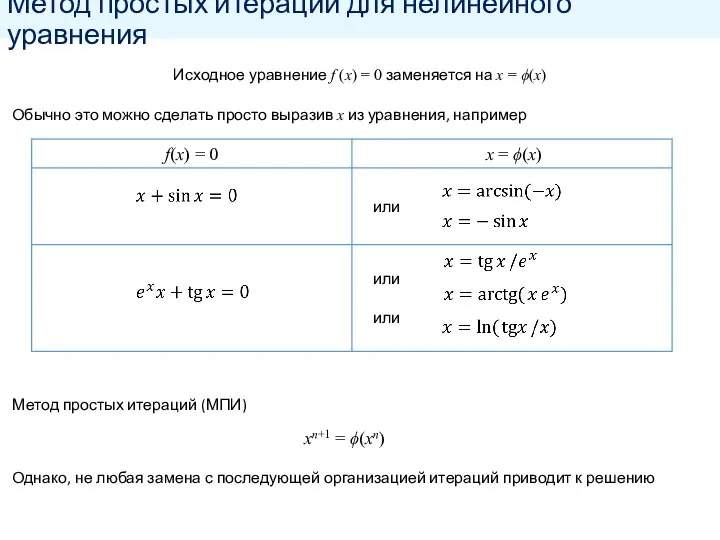
Исходное уравнение f (x) = 0 заменяется
Метод простых итераций для нелинейного уравнения
Исходное уравнение f (x) = 0 заменяется
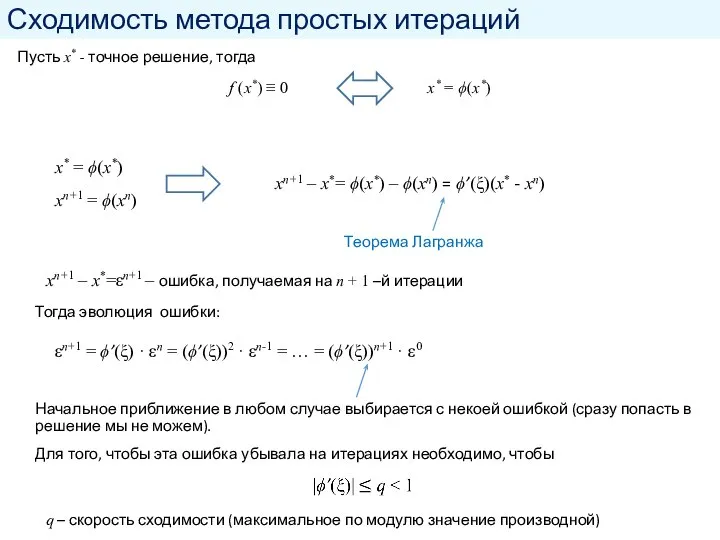
Слайд 6Сходимость метода простых итераций
Теорема Лагранжа
f (x*) ≡ 0 x* = ϕ(x*)
x*
Сходимость метода простых итераций
Теорема Лагранжа
f (x*) ≡ 0 x* = ϕ(x*)
x*
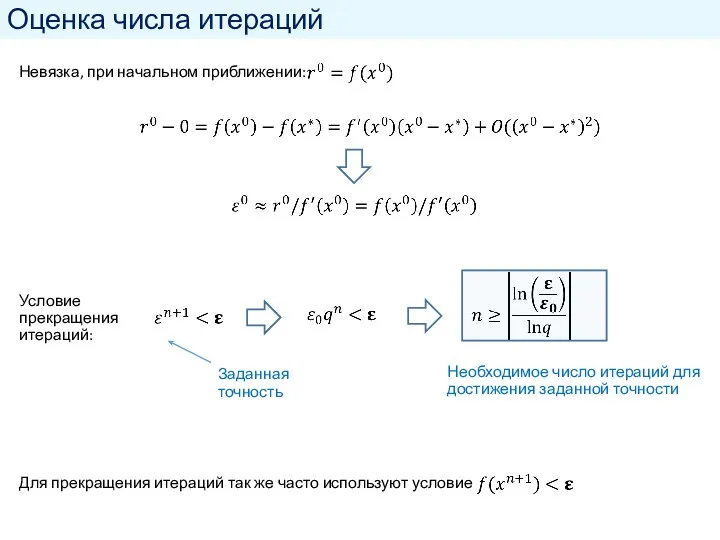
Слайд 7Оценка числа итераций
Условие прекращения итераций:
Заданная точность
Невязка, при начальном приближении:
Необходимое число итераций для
Оценка числа итераций
Условие прекращения итераций:
Заданная точность
Невязка, при начальном приближении:
Необходимое число итераций для
Слайд 8Метод релаксации
Вид метода простой итерации при специальном выборе функции ϕ(x).
Численная производная
Метод релаксации
Вид метода простой итерации при специальном выборе функции ϕ(x).
Численная производная
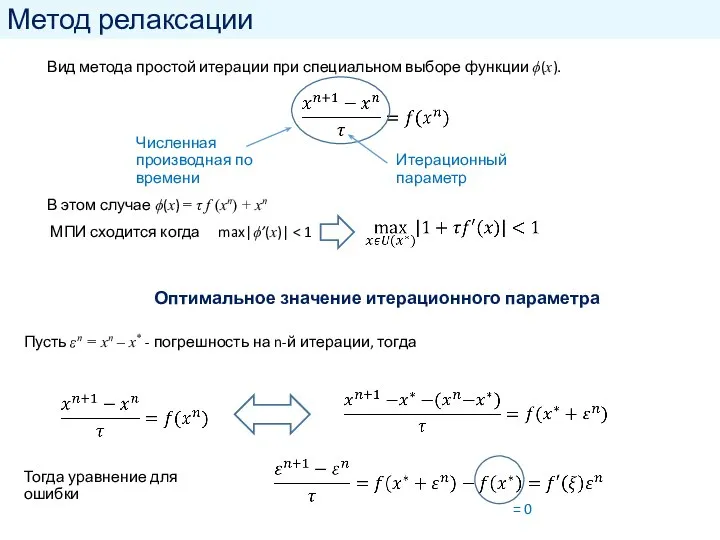
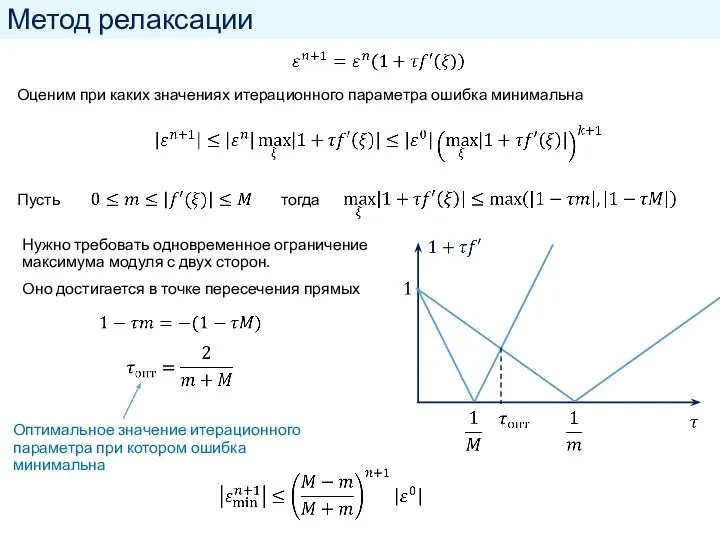
Слайд 9Метод релаксации
Оценим при каких значениях итерационного параметра ошибка минимальна
Пусть тогда
Нужно требовать
Метод релаксации
Оценим при каких значениях итерационного параметра ошибка минимальна
Пусть тогда
Нужно требовать
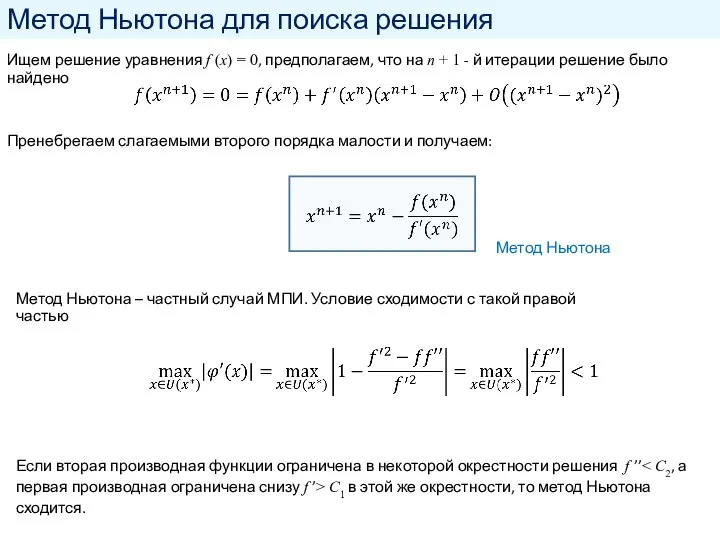
Слайд 10Метод Ньютона для поиска решения
Ищем решение уравнения f (x) = 0, предполагаем,
Метод Ньютона для поиска решения
Ищем решение уравнения f (x) = 0, предполагаем,
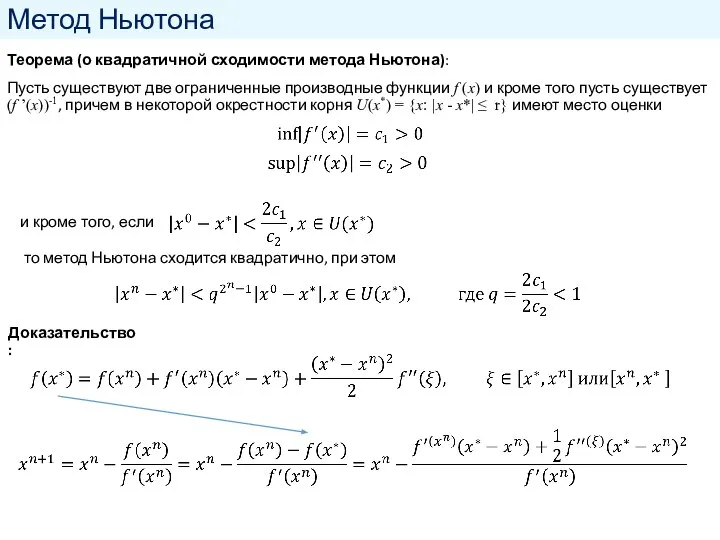
Слайд 11Метод Ньютона
Теорема (о квадратичной сходимости метода Ньютона):
Пусть существуют две ограниченные производные функции
Метод Ньютона
Теорема (о квадратичной сходимости метода Ньютона):
Пусть существуют две ограниченные производные функции
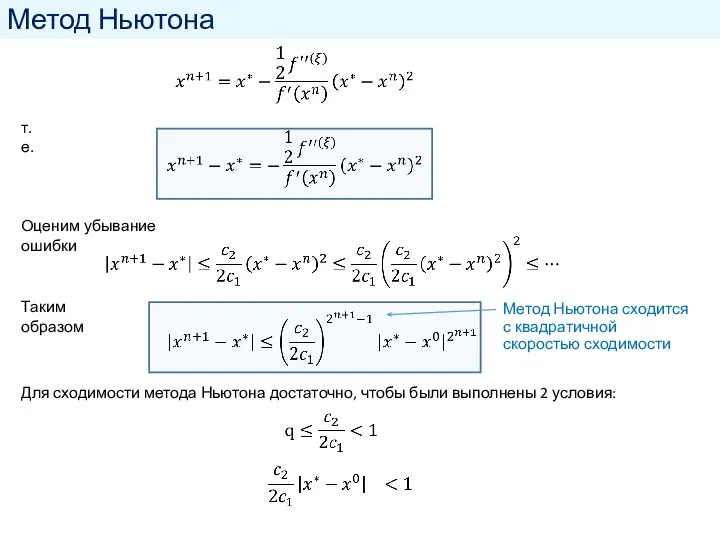
Слайд 12Метод Ньютона
т.е.
Оценим убывание ошибки
Таким образом
Для сходимости метода Ньютона достаточно, чтобы были выполнены
Метод Ньютона
т.е.
Оценим убывание ошибки
Таким образом
Для сходимости метода Ньютона достаточно, чтобы были выполнены
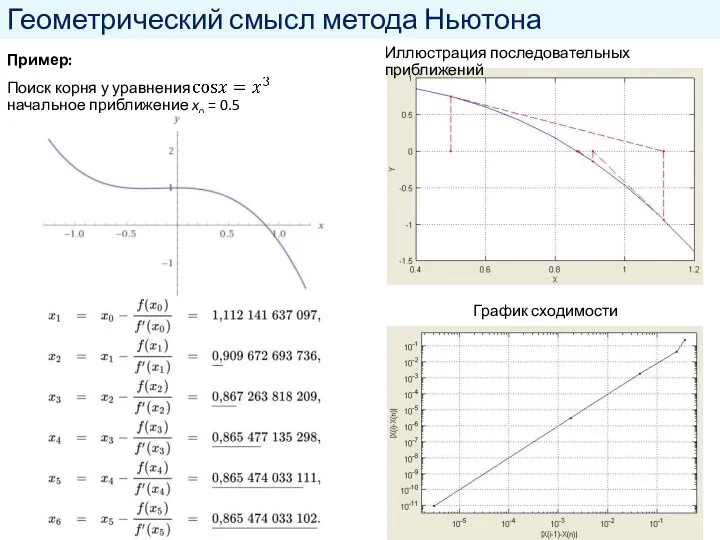
Слайд 13Геометрический смысл метода Ньютона
Пример:
Поиск корня у уравнения
начальное приближение x0 = 0.5
Иллюстрация последовательных
Геометрический смысл метода Ньютона
Пример:
Поиск корня у уравнения
начальное приближение x0 = 0.5
Иллюстрация последовательных
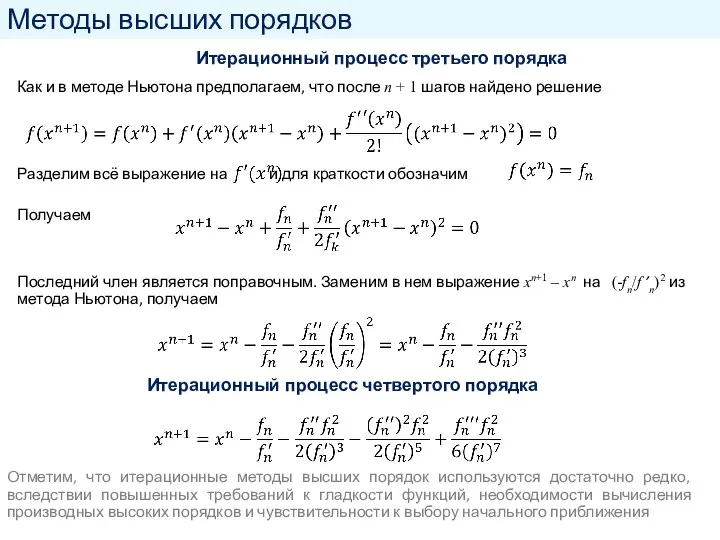
Слайд 14Методы высших порядков
Итерационный процесс третьего порядка
Как и в методе Ньютона предполагаем, что
Методы высших порядков
Итерационный процесс третьего порядка
Как и в методе Ньютона предполагаем, что
Слайд 15Решение систем нелинейных уравнений: аксиомы нормы
Решение систем нелинейных уравнений: аксиомы нормы
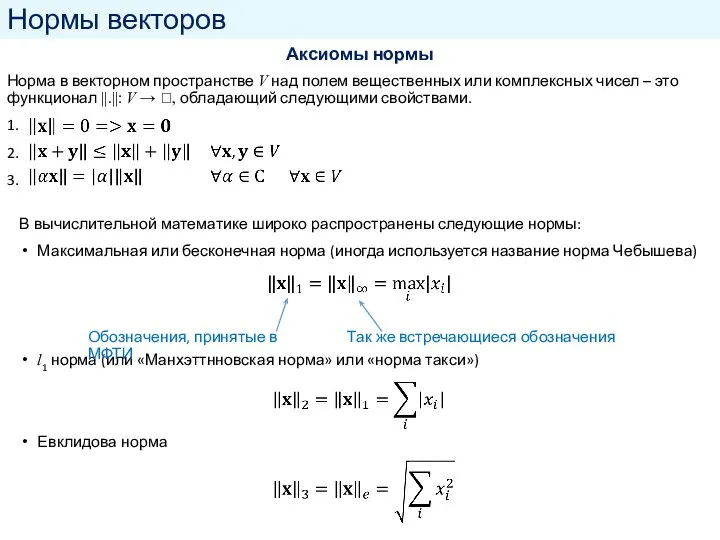
Слайд 16Нормы векторов
В вычислительной математике широко распространены следующие нормы:
Максимальная или бесконечная норма (иногда
Нормы векторов
В вычислительной математике широко распространены следующие нормы:
Максимальная или бесконечная норма (иногда
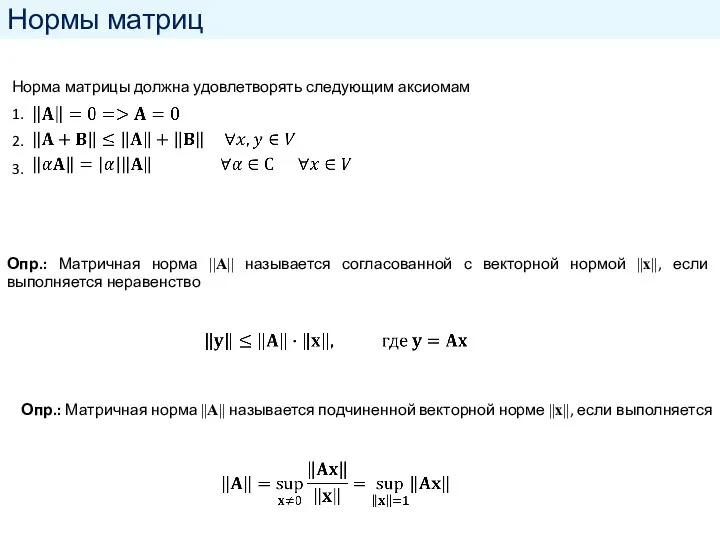
Слайд 17Нормы матриц
Опр.: Матричная норма ||A|| называется согласованной с векторной нормой ||x||, если
Нормы матриц
Опр.: Матричная норма ||A|| называется согласованной с векторной нормой ||x||, если
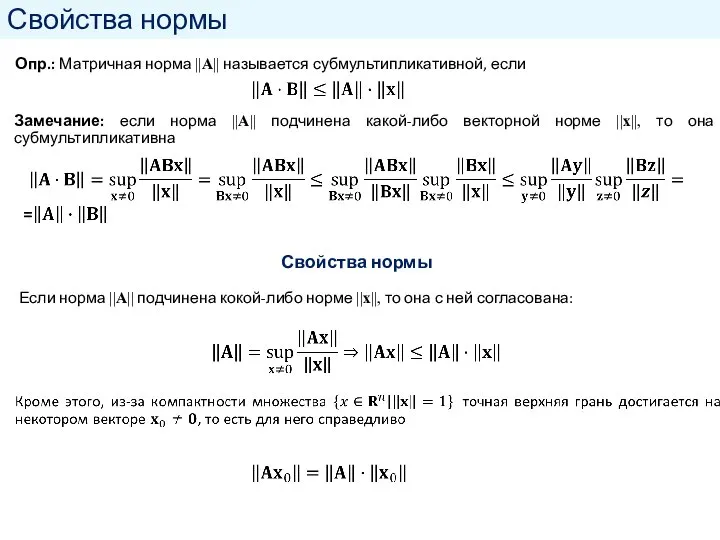
Слайд 18Свойства нормы
Опр.: Матричная норма ||A|| называется субмультипликативной, если
Замечание: если норма ||A|| подчинена
Свойства нормы
Опр.: Матричная норма ||A|| называется субмультипликативной, если
Замечание: если норма ||A|| подчинена
Слайд 19Используемые нормы матриц
Определим выражения для норм матриц
Используемые нормы матриц
Определим выражения для норм матриц

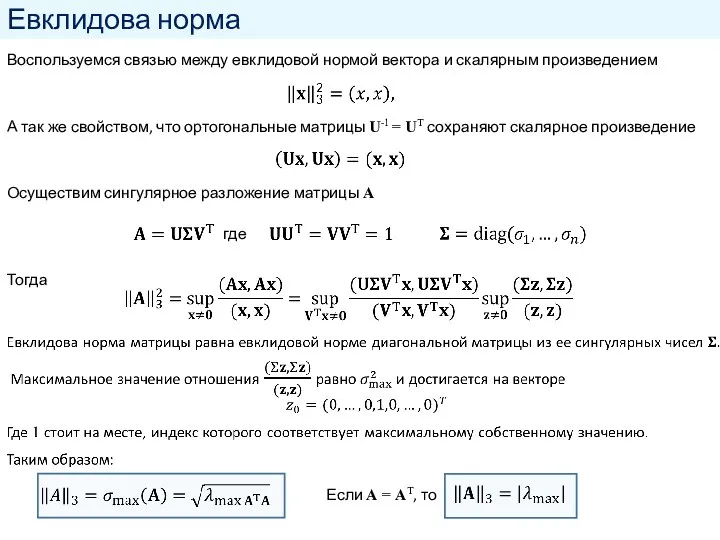
Слайд 20Евклидова норма
Воспользуемся связью между евклидовой нормой вектора и скалярным произведением
А так же
Евклидова норма
Воспользуемся связью между евклидовой нормой вектора и скалярным произведением
А так же
Слайд 21Решение систем нелинейных уравнений: аксиомы нормы
Решение систем нелинейных уравнений: аксиомы нормы
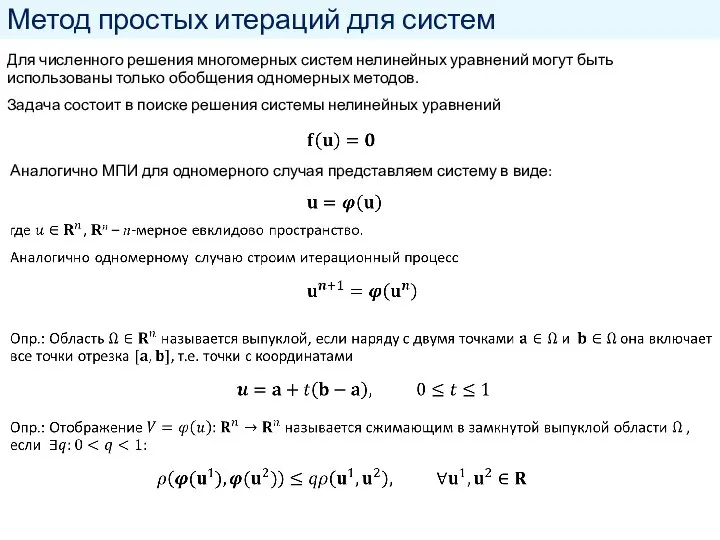
Слайд 22Метод простых итераций для систем
Для численного решения многомерных систем нелинейных уравнений могут
Метод простых итераций для систем
Для численного решения многомерных систем нелинейных уравнений могут
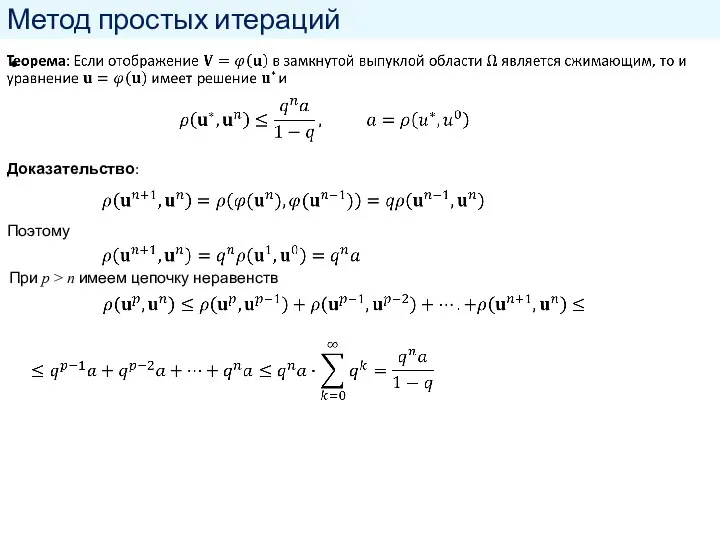
Слайд 23Метод простых итераций
Доказательство:
Поэтому
При p > n имеем цепочку неравенств
Метод простых итераций
Доказательство:
Поэтому
При p > n имеем цепочку неравенств
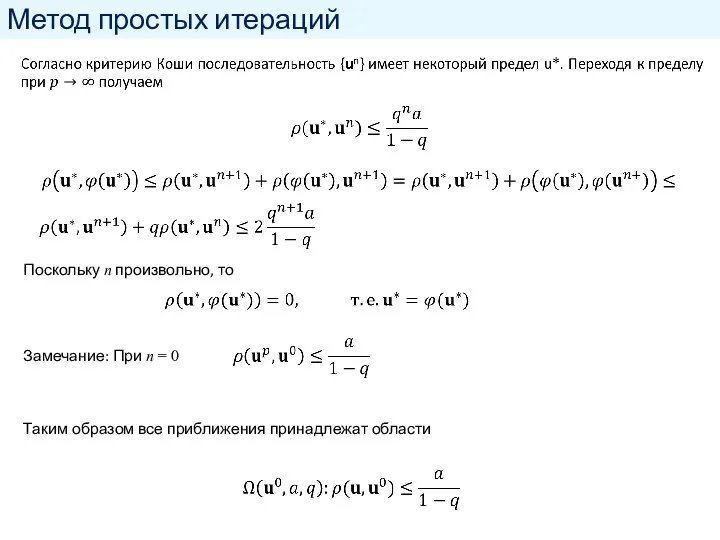
Слайд 24Метод простых итераций
Поскольку n произвольно, то
Замечание: При n = 0
Таким
Метод простых итераций
Поскольку n произвольно, то
Замечание: При n = 0
Таким
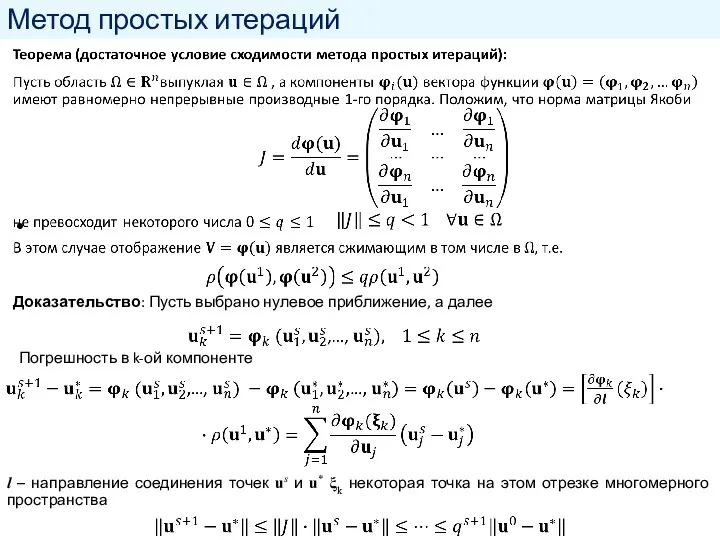
Слайд 25Метод простых итераций
Доказательство: Пусть выбрано нулевое приближение, а далее
Погрешность в k-ой
Метод простых итераций
Доказательство: Пусть выбрано нулевое приближение, а далее
Погрешность в k-ой
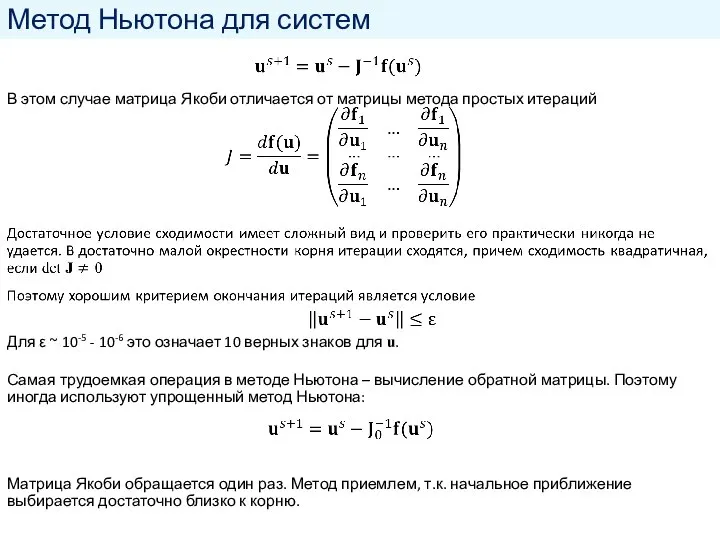
Слайд 26Метод Ньютона для систем
В этом случае матрица Якоби отличается от матрицы метода
Метод Ньютона для систем
В этом случае матрица Якоби отличается от матрицы метода
 Математический калейдоскоп
Математический калейдоскоп Десятичные дроби
Десятичные дроби Алгоритм метода конечных элементов (МКЭ)
Алгоритм метода конечных элементов (МКЭ) Основные задачи и область применения дискретной математики
Основные задачи и область применения дискретной математики Матрицы и определители
Матрицы и определители Теоретический зачет по теме Начальные геометрические сведения
Теоретический зачет по теме Начальные геометрические сведения Оболочки отрицательной Гаусовой кривизны
Оболочки отрицательной Гаусовой кривизны Квадратные уравнения. Урок-путешествие
Квадратные уравнения. Урок-путешествие Предсказание будущего
Предсказание будущего Свойства касательных к окружности. 7 класс
Свойства касательных к окружности. 7 класс Методы решения тригонометрических уравнений
Методы решения тригонометрических уравнений Тригонометрические уравнения. Уравнение cos x=a
Тригонометрические уравнения. Уравнение cos x=a Прямолинейный тренд
Прямолинейный тренд Презентация на тему Действия с целыми числами
Презентация на тему Действия с целыми числами  Презентация на тему Умножение суммы на число
Презентация на тему Умножение суммы на число  Математическая викторина
Математическая викторина Сам за себя. Викторина
Сам за себя. Викторина Аналитические функции и конформные отображения
Аналитические функции и конформные отображения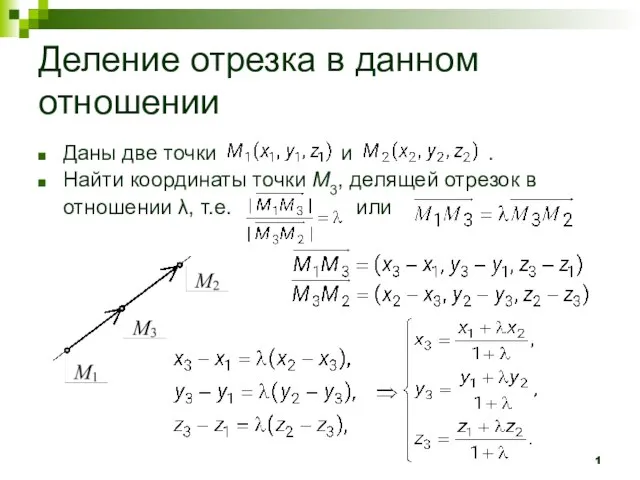 Деление отрезка в данном отношении
Деление отрезка в данном отношении Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ
Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ  Связь сложения и умножения
Связь сложения и умножения Учимся складывать столбиком
Учимся складывать столбиком Степень и ее свойства
Степень и ее свойства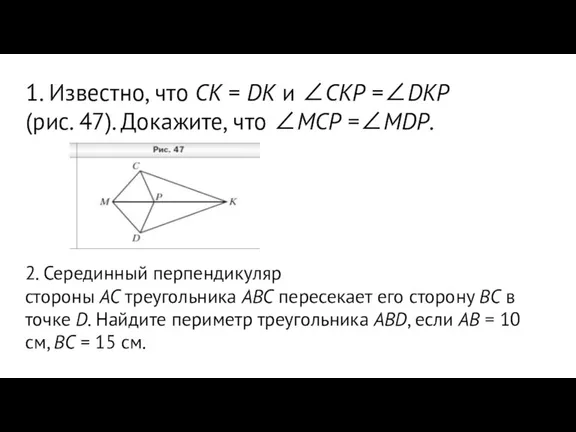 Треугольники. Задача
Треугольники. Задача Презентация на тему Деление с остатком
Презентация на тему Деление с остатком  Преобразование многочленов с помощью формул сокращённого умножения
Преобразование многочленов с помощью формул сокращённого умножения Логарифмические уравнения. Спецификация ЕГЭ В5. Приемы и методы решения уравнений
Логарифмические уравнения. Спецификация ЕГЭ В5. Приемы и методы решения уравнений Непосредственно-образовательная деятельность по формированию элементарных математических представлений
Непосредственно-образовательная деятельность по формированию элементарных математических представлений