- lecture5

Содержание
- 2. Определение: Вероятностный автомат [англ., probabilistic automat) (ВА) - это дискретный потактный преобразователь информации с памятью, функционирование
- 3. в проектировании дискретных систем, проявляющих статистически закономерное случайное поведение; в определении алгоритмических возможностей систем; в обосновании
- 4. Пусть множество G, элементами которого являются всевозможные пары где xi и zs — элементы входного подмножества
- 5. Введем более общую математическую схему. Пусть Ф — множество всевозможных пар вида (zk, yj), где yj
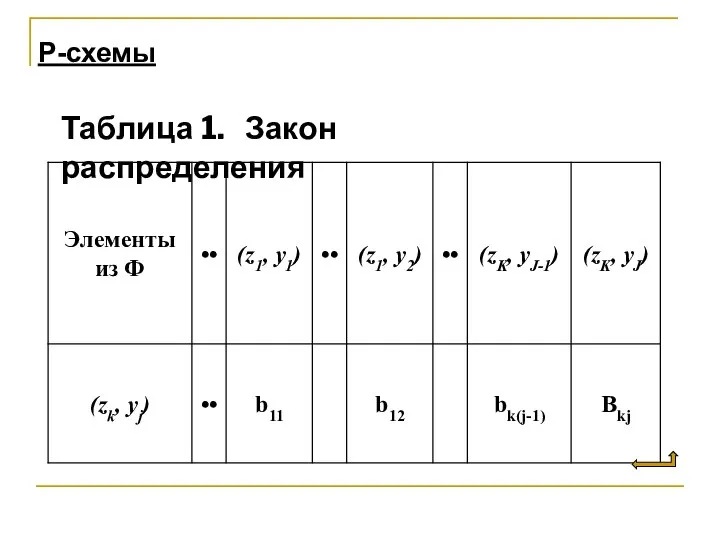
- 6. P-схемы Таблица 1. Закон распределения
- 7. При этом , (2) где bkj — вероятности перехода автомат в состояние zk и выдаче на
- 8. Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z, которые можно представить
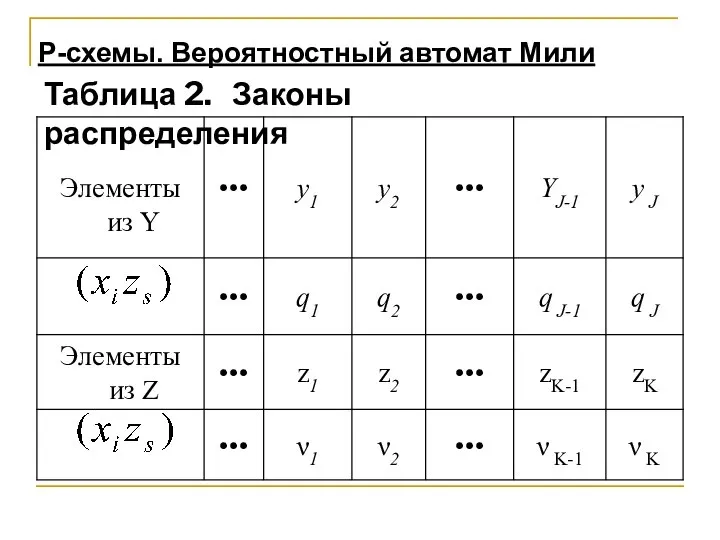
- 9. P-схемы. Вероятностный автомат Мили Таблица 2. Законы распределения
- 10. При этом и (4)— вероятности перехода Р-автомата в состояние zk и выдачи выходного сигнала yk при
- 11. Если для всех k и j имеет место соотношение (5), то такой автомат называется вероятностным автоматом
- 12. Пусть выходной сигнал Р-автомата зависит лишь от того состояния, в котором находится автомат в данном такте
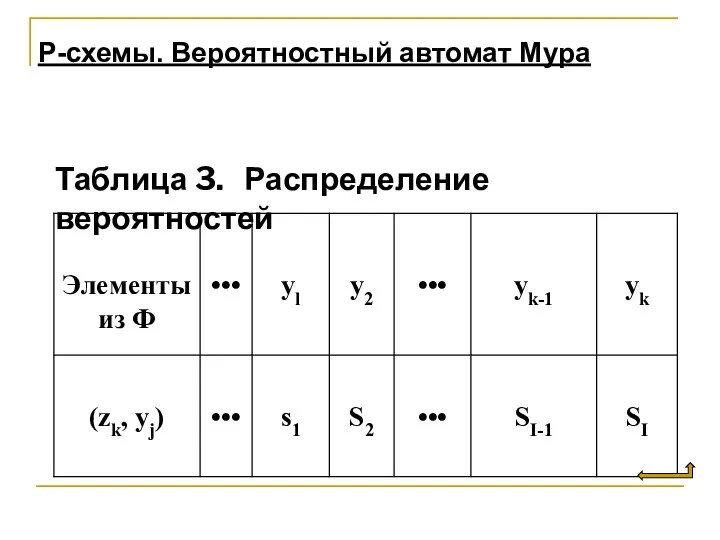
- 13. P-схемы. Вероятностный автомат Мура Таблица 3. Распределение вероятностей
- 14. Здесь ,(6) где Si, — вероятность появления сигнала на выходе yi при условии, что Р-автомат находился
- 15. Частным случаем Р-автомата являются автоматы, у которых либо переход в новое состояние, либо выходной сигнал определяются
- 16. Если состояние Р-автомата определяется детерминировано, то такой автомат называется Z-детерминированным вероятностным автоматом. Аналогично, Z-детерминированным вероятностным автоматом
- 17. Пусть У-детерминированный Р-автомат, задан таблицей переходов : где pij – вероятность перехода автомата из состояния zi
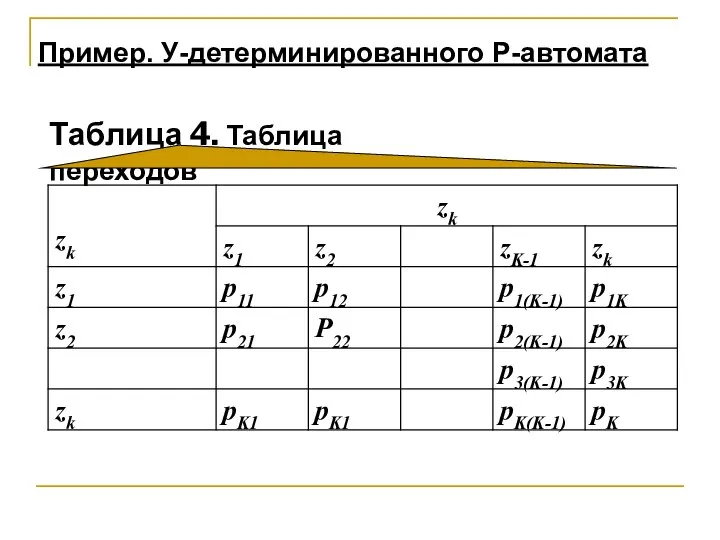
- 18. Пример. У-детерминированного Р-автомата Таблица 4. Таблица переходов
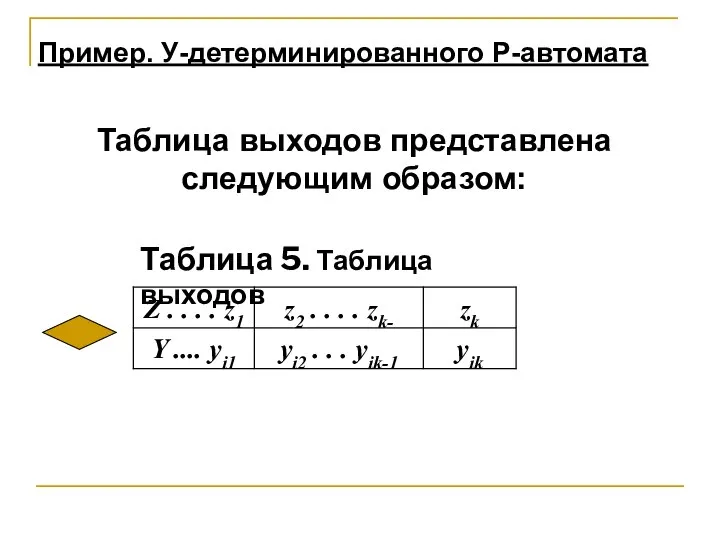
- 19. Таблица выходов представлена следующим образом: Пример. У-детерминированного Р-автомата Таблица 5. Таблица выходов
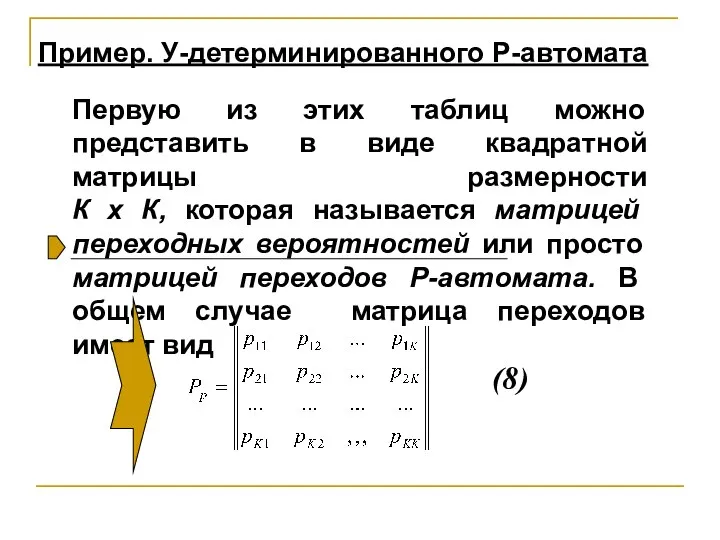
- 20. Первую из этих таблиц можно представить в виде квадратной матрицы размерности К x К, которая называется
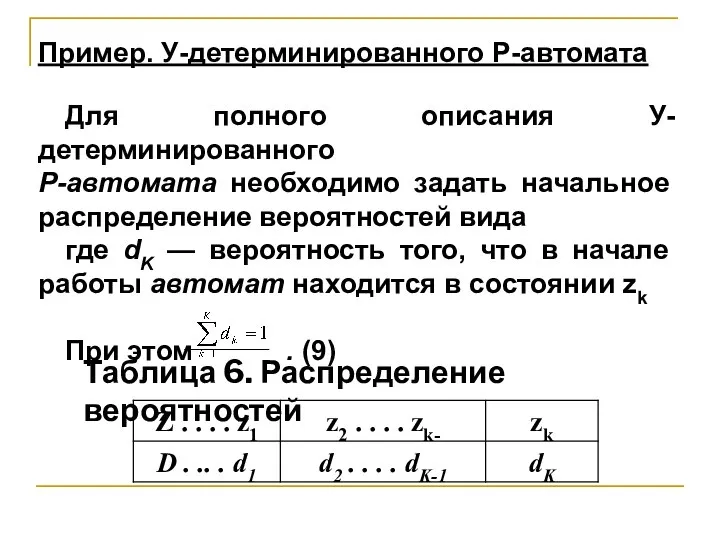
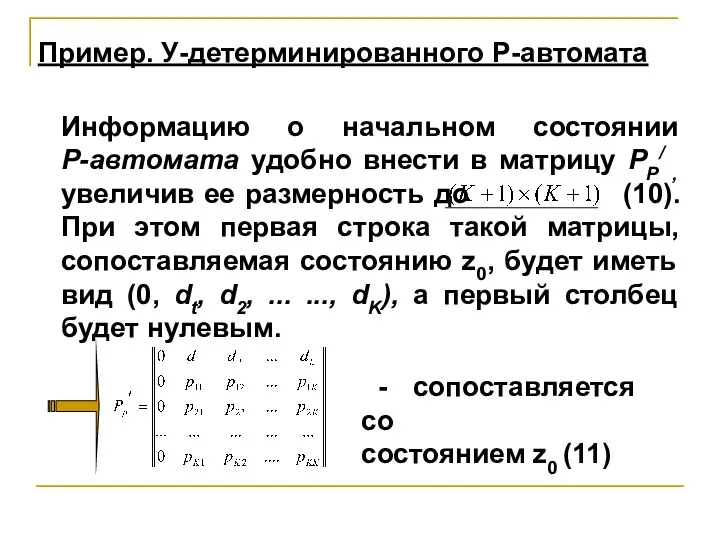
- 21. Для полного описания У-детерминированного Р-автомата необходимо задать начальное распределение вероятностей вида где dK — вероятность того,
- 22. Будем предполагать, что до начала работы (до нулевого такта времени) Р-автомат всегда находится в состоянии z0,
- 23. - сопоставляется со состоянием z0 (11) Информацию о начальном состоянии Р-автомата удобно внести в матрицу РР/
- 24. Описанный У-детерминированный Р-автомат можно задать в виде ориентированного графа, вершины которого сопоставляются состояниям автомата, а дуги
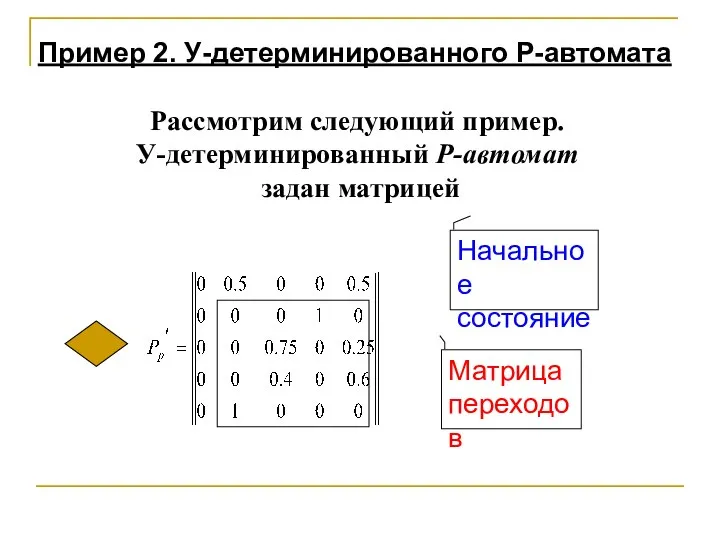
- 25. Рассмотрим следующий пример. У-детерминированный Р-автомат задан матрицей Пример 2. У-детерминированного Р-автомата
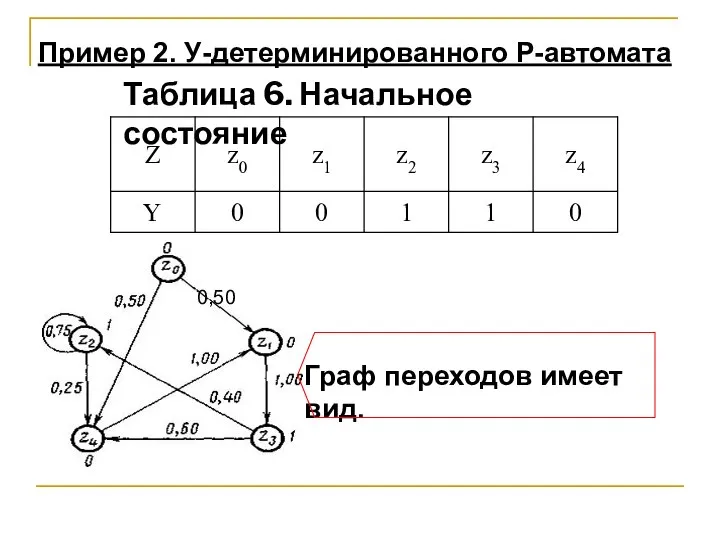
- 26. 0,50 Таблица 6. Начальное состояние Граф переходов имеет вид. Пример 2. У-детерминированного Р-автомата
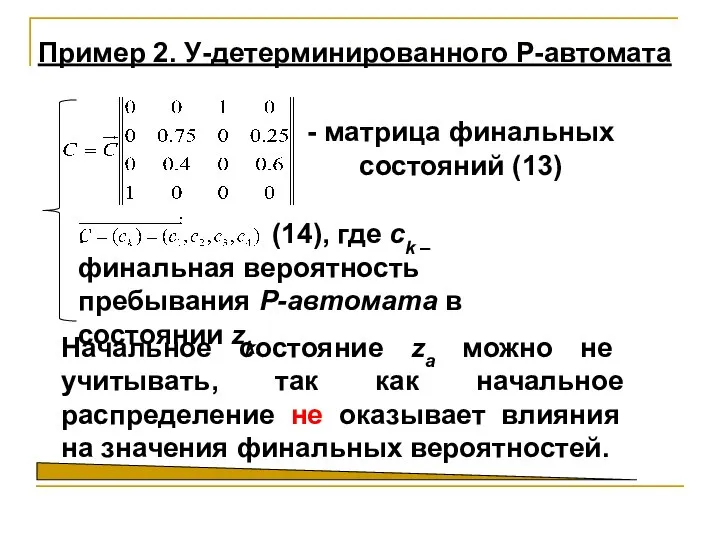
- 27. Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2 и z3. При использовании аналитического
- 28. Начальное состояние za можно не учитывать, так как начальное распределение не оказывает влияния на значения финальных
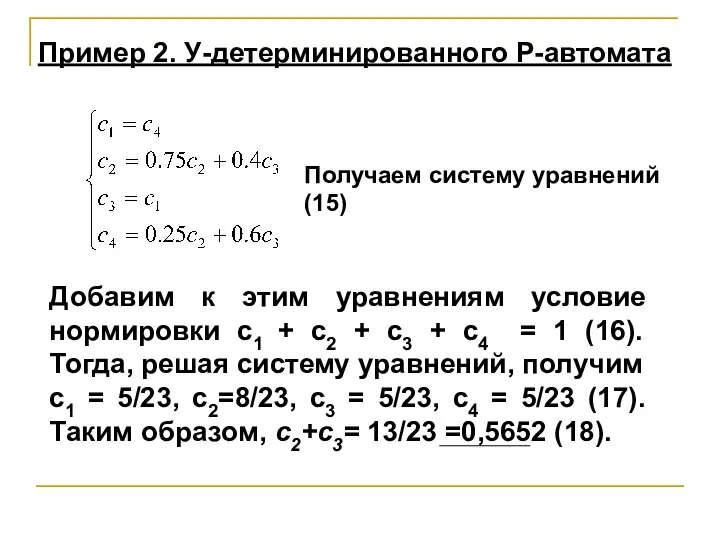
- 29. Добавим к этим уравнениям условие нормировки с1 + с2 + с3 + с4 = 1 (16).
- 30. Другими словами, при бесконечной работе заданного в этом примере У-детерминированного Р-автомата на его выходе формируется двоичная
- 31. Подобные Р-автоматы могут использоваться как генераторы Марковских последовательностей, которые необходимы при построении и реализации процессов функционирования
- 33. Скачать презентацию
Слайд 2Определение: Вероятностный автомат
[англ., probabilistic automat) (ВА)
- это дискретный потактный преобразователь
Определение: Вероятностный автомат
[англ., probabilistic automat) (ВА)
- это дискретный потактный преобразователь
Слайд 3в проектировании дискретных систем, проявляющих статистически закономерное случайное поведение;
в определении алгоритмических возможностей
в проектировании дискретных систем, проявляющих статистически закономерное случайное поведение;
в определении алгоритмических возможностей
Слайд 4Пусть множество G, элементами которого являются всевозможные пары где xi и zs
Пусть множество G, элементами которого являются всевозможные пары где xi и zs
Слайд 5Введем более общую математическую схему. Пусть Ф — множество всевозможных пар вида
Введем более общую математическую схему. Пусть Ф — множество всевозможных пар вида
Слайд 6P-схемы
Таблица 1. Закон распределения
P-схемы
Таблица 1. Закон распределения
Слайд 7При этом , (2) где bkj — вероятности перехода автомат в состояние
При этом , (2) где bkj — вероятности перехода автомат в состояние
Слайд 8Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и
Слайд 9P-схемы. Вероятностный автомат Мили
Таблица 2. Законы распределения
P-схемы. Вероятностный автомат Мили
Таблица 2. Законы распределения
Слайд 10При этом и (4)— вероятности перехода Р-автомата в состояние zk и выдачи
При этом и (4)— вероятности перехода Р-автомата в состояние zk и выдачи

Слайд 11Если для всех k и j имеет место соотношение (5), то такой
Если для всех k и j имеет место соотношение (5), то такой
Слайд 12Пусть выходной сигнал Р-автомата зависит лишь от того состояния, в котором находится
Пусть выходной сигнал Р-автомата зависит лишь от того состояния, в котором находится
Слайд 13P-схемы. Вероятностный автомат Мура
Таблица 3. Распределение вероятностей
P-схемы. Вероятностный автомат Мура
Таблица 3. Распределение вероятностей
Слайд 14Здесь ,(6) где Si, — вероятность появления сигнала на выходе yi при
Здесь ,(6) где Si, — вероятность появления сигнала на выходе yi при
Слайд 15Частным случаем Р-автомата являются автоматы, у которых либо переход в новое состояние,
Частным случаем Р-автомата являются автоматы, у которых либо переход в новое состояние,
Слайд 16Если состояние Р-автомата определяется детерминировано, то такой автомат называется Z-детерминированным вероятностным автоматом.
Аналогично,
Если состояние Р-автомата определяется детерминировано, то такой автомат называется Z-детерминированным вероятностным автоматом.
Аналогично,
Слайд 17Пусть У-детерминированный Р-автомат,
задан таблицей переходов : где pij – вероятность перехода автомата
Пусть У-детерминированный Р-автомат, задан таблицей переходов : где pij – вероятность перехода автомата
Слайд 18Пример. У-детерминированного Р-автомата
Таблица 4. Таблица переходов
Пример. У-детерминированного Р-автомата
Таблица 4. Таблица переходов
Слайд 19Таблица выходов представлена следующим образом:
Пример. У-детерминированного Р-автомата
Таблица 5. Таблица выходов
Таблица выходов представлена следующим образом:
Пример. У-детерминированного Р-автомата
Таблица 5. Таблица выходов
Слайд 20Первую из этих таблиц можно представить в виде квадратной матрицы размерности
К
Первую из этих таблиц можно представить в виде квадратной матрицы размерности К
Слайд 21Для полного описания У-детерминированного
Р-автомата необходимо задать начальное распределение вероятностей вида
где dK
Для полного описания У-детерминированного
Р-автомата необходимо задать начальное распределение вероятностей вида
где dK
Слайд 22Будем предполагать, что до начала работы (до нулевого такта времени) Р-автомат всегда
Будем предполагать, что до начала работы (до нулевого такта времени) Р-автомат всегда
Слайд 23 - сопоставляется со
состоянием z0 (11)
Информацию о начальном состоянии
Р-автомата удобно
- сопоставляется со
состоянием z0 (11)
Информацию о начальном состоянии Р-автомата удобно
Слайд 24Описанный У-детерминированный
Р-автомат можно задать в виде ориентированного графа, вершины которого сопоставляются
Описанный У-детерминированный
Р-автомат можно задать в виде ориентированного графа, вершины которого сопоставляются
Слайд 25Рассмотрим следующий пример.
У-детерминированный Р-автомат
задан матрицей
Пример 2. У-детерминированного Р-автомата
Рассмотрим следующий пример.
У-детерминированный Р-автомат
задан матрицей
Пример 2. У-детерминированного Р-автомата
Слайд 260,50
Таблица 6. Начальное состояние
Граф переходов имеет вид.
Пример 2. У-детерминированного Р-автомата
0,50
Таблица 6. Начальное состояние
Граф переходов имеет вид.
Пример 2. У-детерминированного Р-автомата
Слайд 27Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2 и
Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2 и
Слайд 28Начальное состояние za можно не учитывать, так как начальное распределение не оказывает
Начальное состояние za можно не учитывать, так как начальное распределение не оказывает
Слайд 29Добавим к этим уравнениям условие нормировки с1 + с2 + с3 +
Добавим к этим уравнениям условие нормировки с1 + с2 + с3 +
Слайд 30 Другими словами, при бесконечной работе заданного в этом примере
У-детерминированного Р-автомата на
Другими словами, при бесконечной работе заданного в этом примере У-детерминированного Р-автомата на
Слайд 31 Подобные Р-автоматы могут использоваться как генераторы Марковских последовательностей, которые необходимы при построении
Подобные Р-автоматы могут использоваться как генераторы Марковских последовательностей, которые необходимы при построении
 Исследование функций
Исследование функций Параллельные прямые 7 класс
Параллельные прямые 7 класс Презентация на тему Прибавление числа 4 (1 класс)
Презентация на тему Прибавление числа 4 (1 класс)  Чтение девятизначных чисел
Чтение девятизначных чисел Взаимное расположение прямой и окружности. Касательная
Взаимное расположение прямой и окружности. Касательная Решение задач с помощью уравнений
Решение задач с помощью уравнений Алгебра логики
Алгебра логики Математика – наука о наиболее общих и фундаментальных структурах реального мира
Математика – наука о наиболее общих и фундаментальных структурах реального мира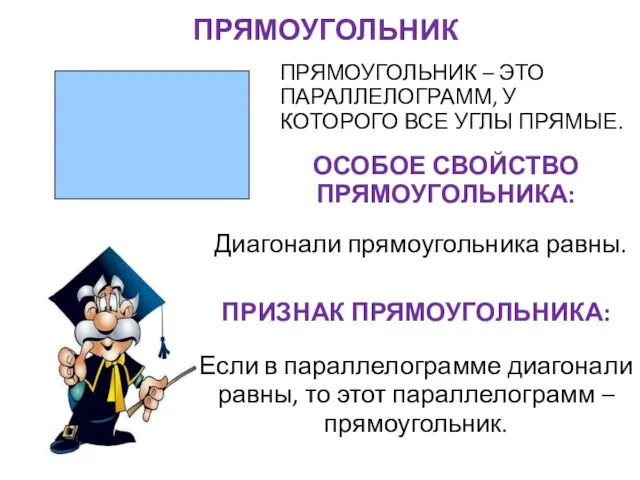 Прямоугольник. Признак прямоугольника
Прямоугольник. Признак прямоугольника Письменное умножение на трёхзначное число
Письменное умножение на трёхзначное число Сборник по подготовке к государственной итоговой аттестации по геометрии
Сборник по подготовке к государственной итоговой аттестации по геометрии Презентация на тему Правильные многоугольники
Презентация на тему Правильные многоугольники  Доминино
Доминино Что должен знать ученик о способах задания функции? Какие достоинства и недостатки имеет каждый способ?
Что должен знать ученик о способах задания функции? Какие достоинства и недостатки имеет каждый способ? Ликвидация пробелов в знаниях по теме Соотношения между сторонами и углами треугольника
Ликвидация пробелов в знаниях по теме Соотношения между сторонами и углами треугольника КВН по математике Привет друзья! Сегодня в школе Большой и интересный день Мы приготовили веселый Наш школьный праздник КВН.
КВН по математике Привет друзья! Сегодня в школе Большой и интересный день Мы приготовили веселый Наш школьный праздник КВН. Простейшие линейные цепи при гармоническом воздействии
Простейшие линейные цепи при гармоническом воздействии Теория алгоритмов
Теория алгоритмов Полиномы над полями конечной характеристики
Полиномы над полями конечной характеристики Действия с числами, записанными в стандартном виде
Действия с числами, записанными в стандартном виде Серединный перпендикуляр
Серединный перпендикуляр Иллюзии и математические парадоксы
Иллюзии и математические парадоксы Учимся складывать столбиком
Учимся складывать столбиком Функциональная грамотность на уроках математики
Функциональная грамотность на уроках математики Презентация по математике "Праздник чисел «5 плюс »" -
Презентация по математике "Праздник чисел «5 плюс »" -  ДУ и численные методы. Системы дифференциальных уравнений. 2 семестр. Лекция 8
ДУ и численные методы. Системы дифференциальных уравнений. 2 семестр. Лекция 8 Интерполирование с кратными узлами
Интерполирование с кратными узлами Кривые второго порядка
Кривые второго порядка