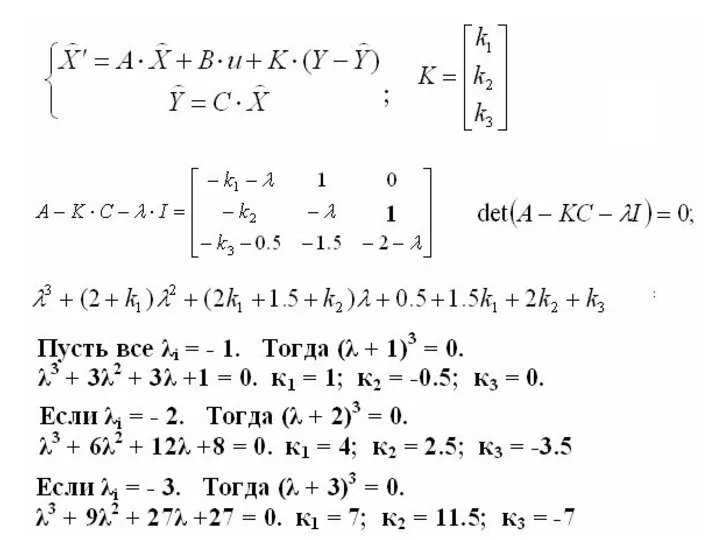
- Построение наблюдателя для ситемы 3-го порядка. (Тема 7)

Содержание
- 3. Модель системы с наблюдателем
- 4. Результат измерения y(t)
- 5. Результат наблюдения x1
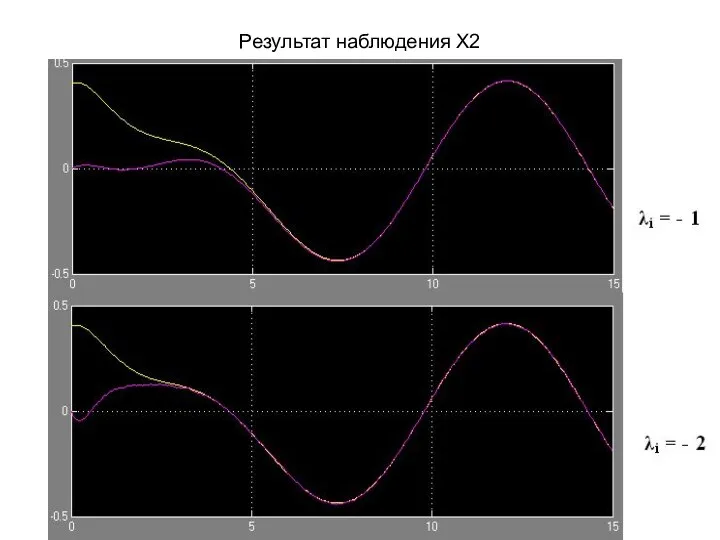
- 6. Результат наблюдения Х2
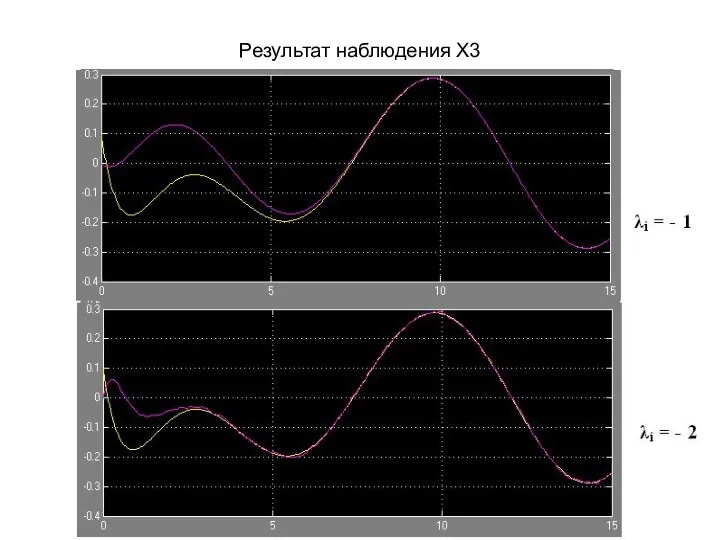
- 7. Результат наблюдения Х3
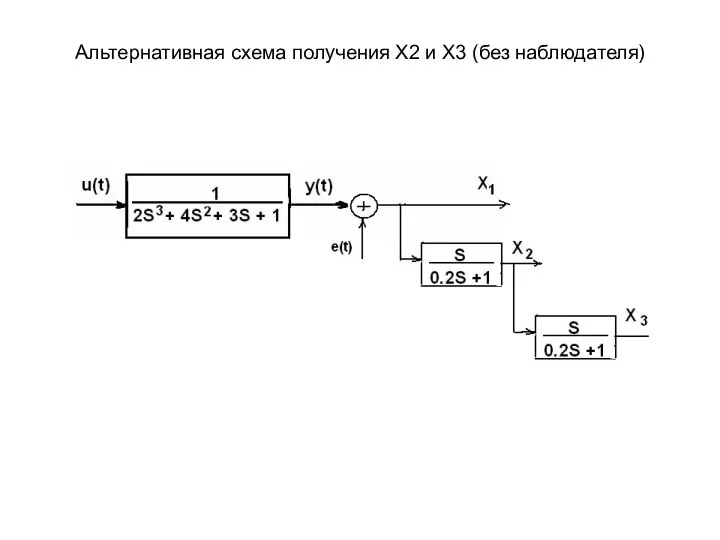
- 8. Альтернативная схема получения Х2 и Х3 (без наблюдателя)
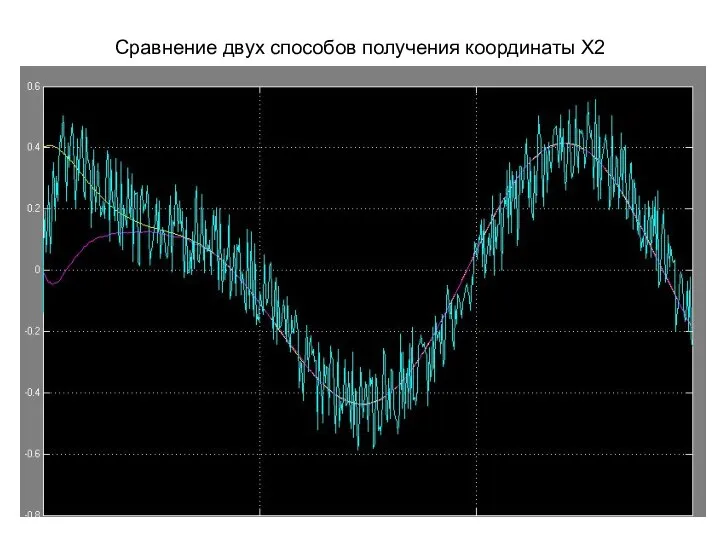
- 9. Сравнение двух способов получения координаты Х2
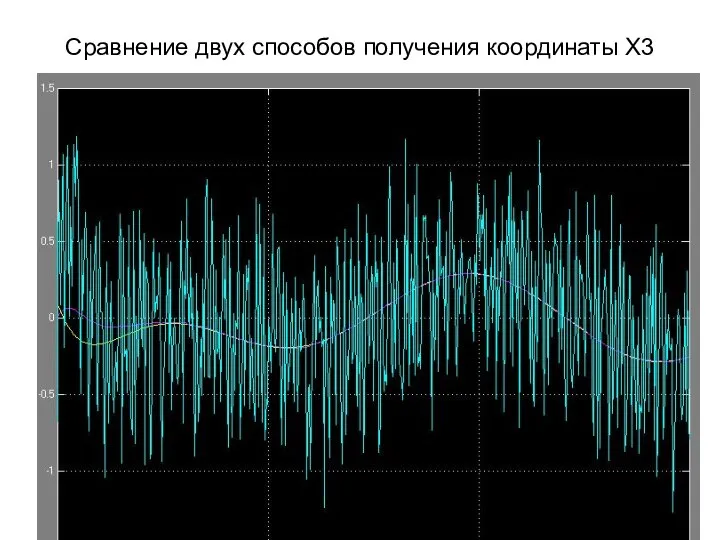
- 10. Сравнение двух способов получения координаты Х3
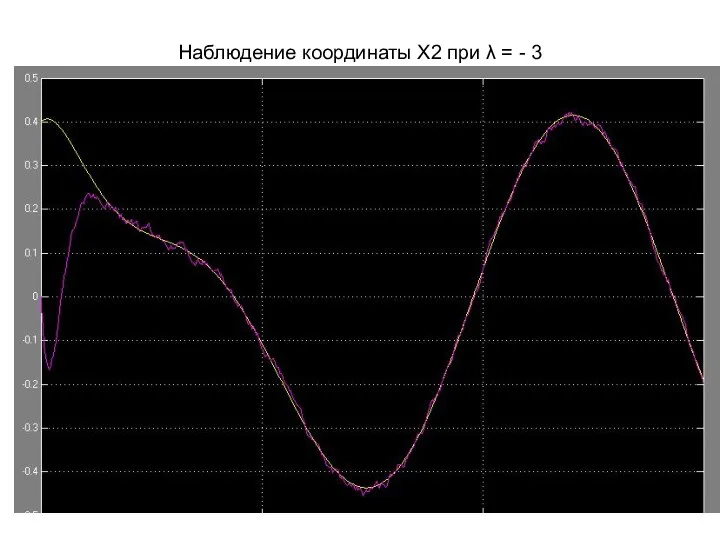
- 11. Наблюдение координаты Х2 при λ = - 3
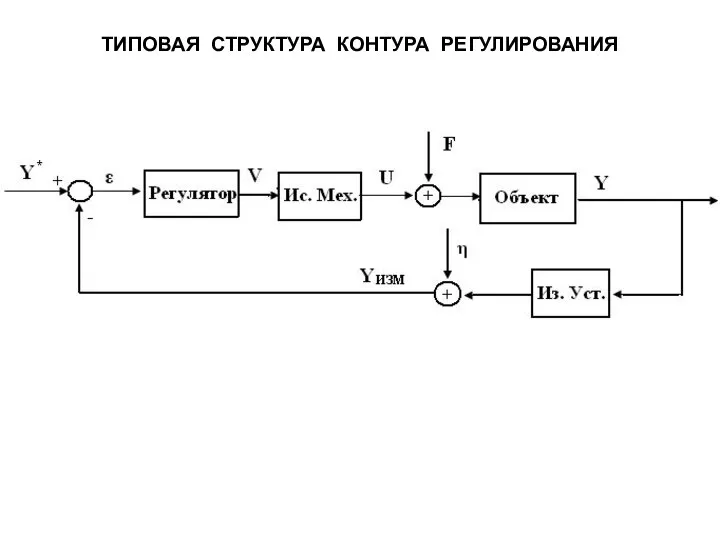
- 12. ТИПОВАЯ СТРУКТУРА КОНТУРА РЕГУЛИРОВАНИЯ
- 15. Наблюдение координат состояния и медленно изменяющегося f
- 17. Схема наблюдения координат состояния и f(t)
- 18. Наблюдение координаты Х1
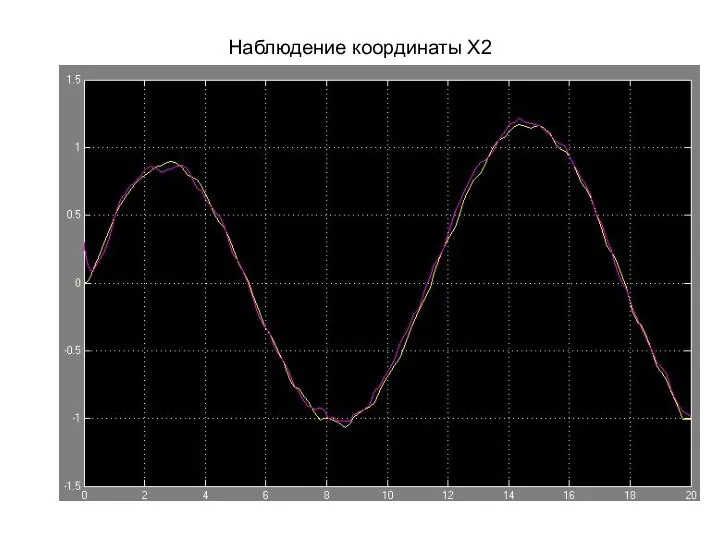
- 19. Наблюдение координаты Х2
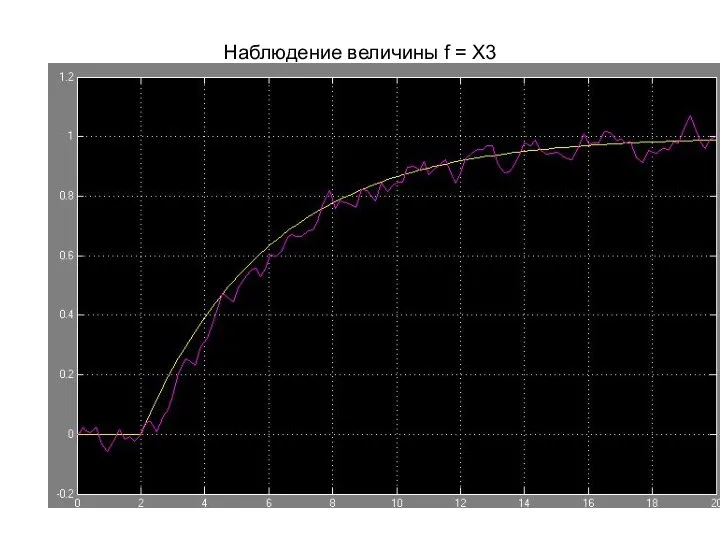
- 20. Наблюдение величины f = X3
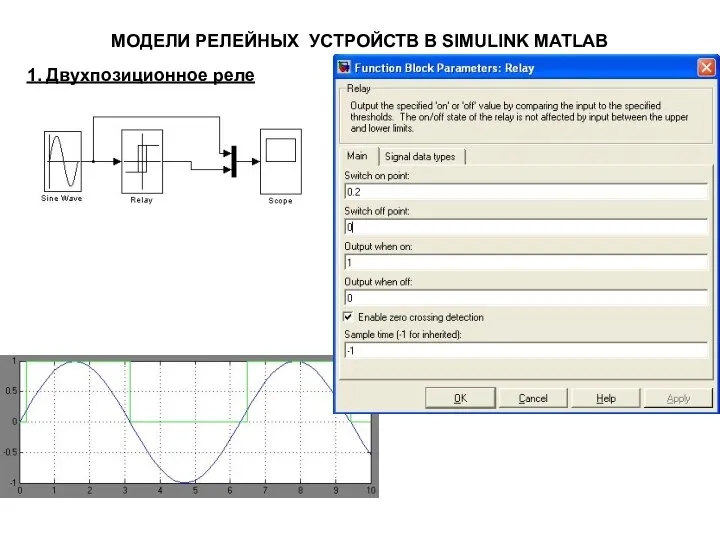
- 21. МОДЕЛИ РЕЛЕЙНЫХ УСТРОЙСТВ В SIMULINK MATLAB 1. Двухпозиционное реле
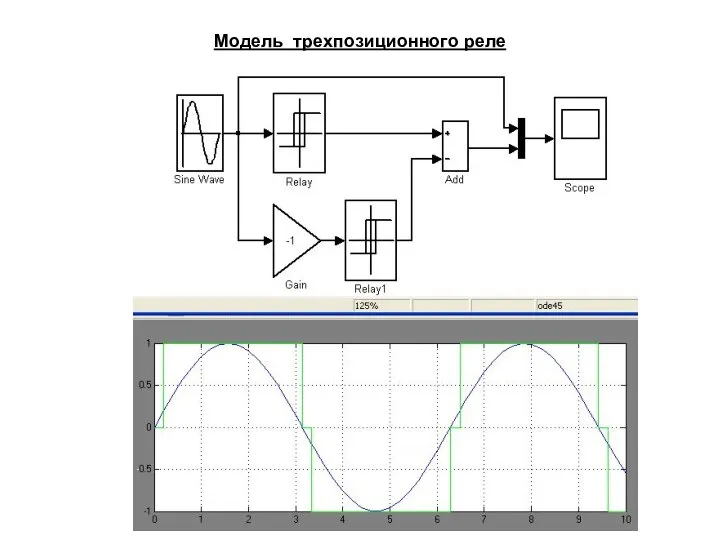
- 22. Модель трехпозиционного реле
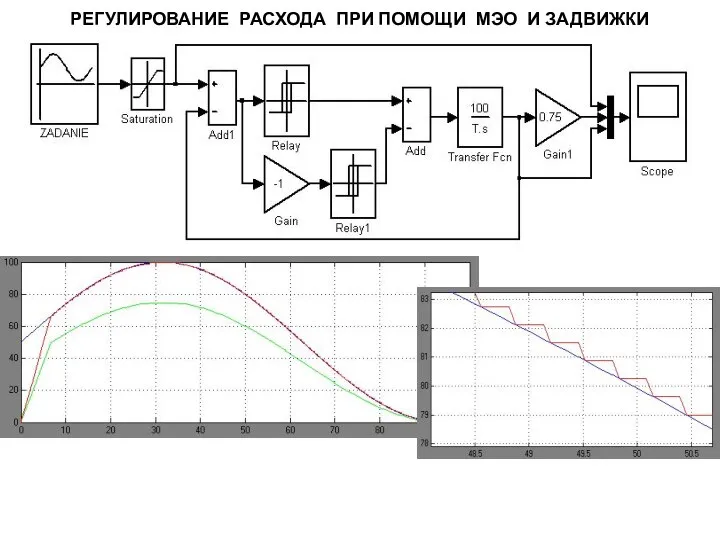
- 23. РЕГУЛИРОВАНИЕ РАСХОДА ПРИ ПОМОЩИ МЭО И ЗАДВИЖКИ
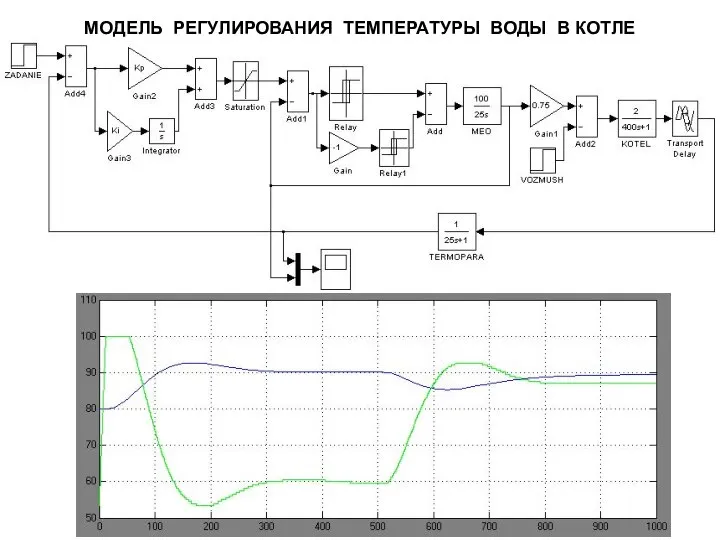
- 24. МОДЕЛЬ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОДЫ В КОТЛЕ
- 26. Скачать презентацию
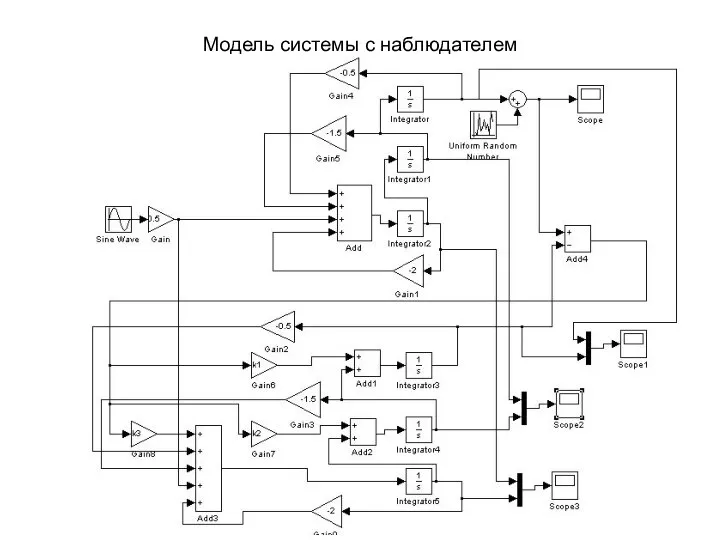
Слайд 3Модель системы с наблюдателем
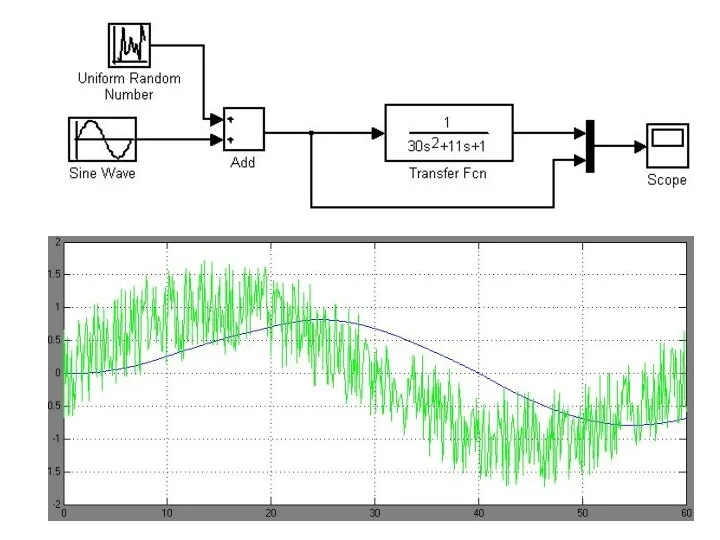
Модель системы с наблюдателем
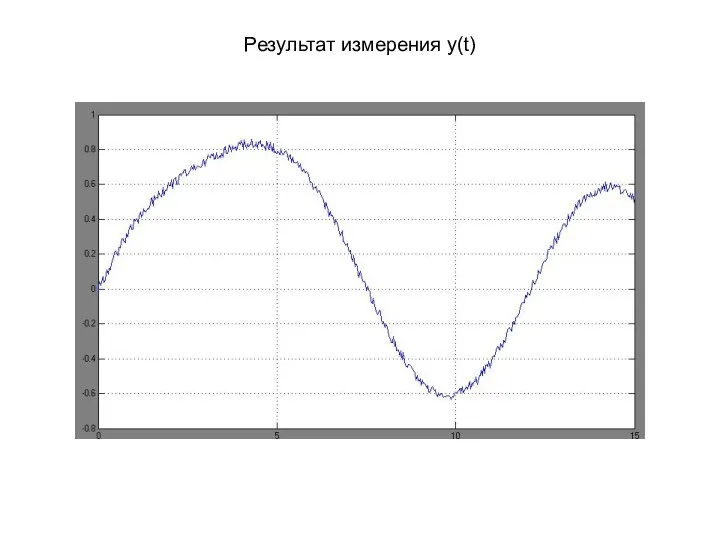
Слайд 4Результат измерения y(t)
Результат измерения y(t)
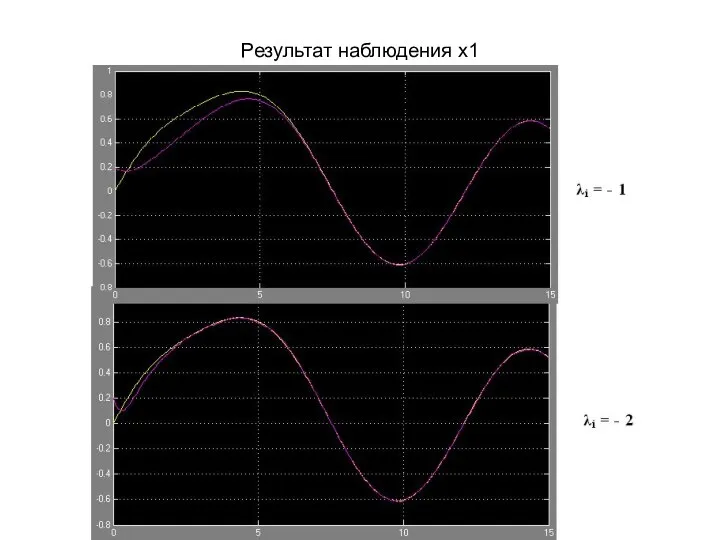
Слайд 5Результат наблюдения x1
Результат наблюдения x1
Слайд 6Результат наблюдения Х2
Результат наблюдения Х2
Слайд 7Результат наблюдения Х3
Результат наблюдения Х3
Слайд 8Альтернативная схема получения Х2 и Х3 (без наблюдателя)
Альтернативная схема получения Х2 и Х3 (без наблюдателя)
Слайд 9Сравнение двух способов получения координаты Х2
Сравнение двух способов получения координаты Х2
Слайд 10Сравнение двух способов получения координаты Х3
Сравнение двух способов получения координаты Х3
Слайд 11Наблюдение координаты Х2 при λ = - 3
Наблюдение координаты Х2 при λ = - 3
Слайд 12ТИПОВАЯ СТРУКТУРА КОНТУРА РЕГУЛИРОВАНИЯ
ТИПОВАЯ СТРУКТУРА КОНТУРА РЕГУЛИРОВАНИЯ
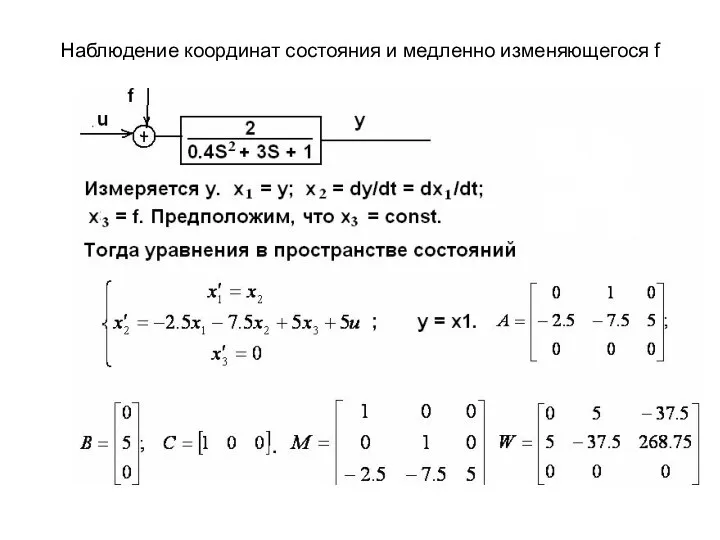
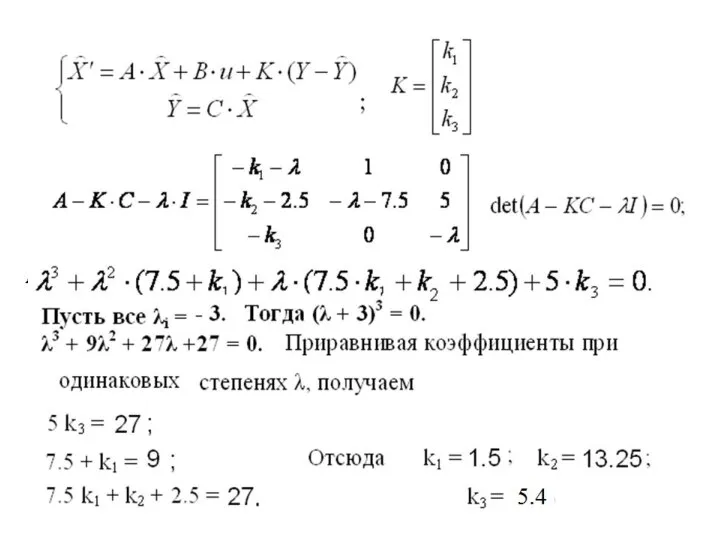
Слайд 15Наблюдение координат состояния и медленно изменяющегося f
Наблюдение координат состояния и медленно изменяющегося f
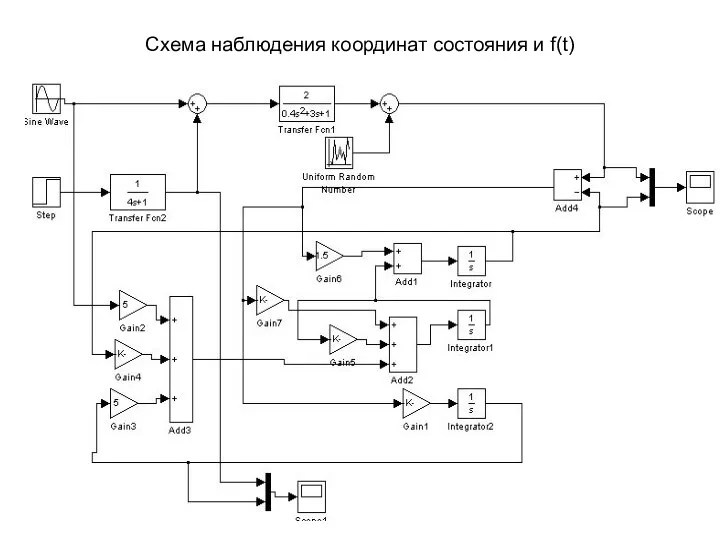
Слайд 17Схема наблюдения координат состояния и f(t)
Схема наблюдения координат состояния и f(t)
Слайд 18Наблюдение координаты Х1
Наблюдение координаты Х1

Слайд 19Наблюдение координаты Х2
Наблюдение координаты Х2
Слайд 20Наблюдение величины f = X3
Наблюдение величины f = X3
Слайд 21МОДЕЛИ РЕЛЕЙНЫХ УСТРОЙСТВ В SIMULINK MATLAB
1. Двухпозиционное реле
МОДЕЛИ РЕЛЕЙНЫХ УСТРОЙСТВ В SIMULINK MATLAB
1. Двухпозиционное реле
Слайд 22Модель трехпозиционного реле
Модель трехпозиционного реле
Слайд 23РЕГУЛИРОВАНИЕ РАСХОДА ПРИ ПОМОЩИ МЭО И ЗАДВИЖКИ
РЕГУЛИРОВАНИЕ РАСХОДА ПРИ ПОМОЩИ МЭО И ЗАДВИЖКИ
Слайд 24МОДЕЛЬ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОДЫ В КОТЛЕ
МОДЕЛЬ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОДЫ В КОТЛЕ
 Правила решения уравнений
Правила решения уравнений Иррациональные уравнения
Иррациональные уравнения Решение треугольников
Решение треугольников Шар и сфера
Шар и сфера Математика
Математика Смежные и вертикальные углы. Решение задач
Смежные и вертикальные углы. Решение задач Решение текстовых задач арифметическим способом
Решение текстовых задач арифметическим способом Урок-игра: Геометрические состязания
Урок-игра: Геометрические состязания Тригонометрические функции. Их свойства и график (1)
Тригонометрические функции. Их свойства и график (1) Измерение углов.Транспортир
Измерение углов.Транспортир Волшебная страна - Геометрия
Волшебная страна - Геометрия Deterministic finite automata. Nondeterministic finite automata
Deterministic finite automata. Nondeterministic finite automata Теоремы теории вероятностей
Теоремы теории вероятностей Игра-конкурс
Игра-конкурс Признаки подобия треугольников (урок-практикум)
Признаки подобия треугольников (урок-практикум) Решение показательных неравенств
Решение показательных неравенств Проценты. Задания
Проценты. Задания Презентация на тему Простейшие вероятностные задачи
Презентация на тему Простейшие вероятностные задачи  Графические диктанты для детей. Рисуем по клеточкам
Графические диктанты для детей. Рисуем по клеточкам Самостоятельная работа. Геометрия
Самостоятельная работа. Геометрия Математика. Проверочная работа
Математика. Проверочная работа Решение задач на дроби. Фрагмент урока математики в 6 классе
Решение задач на дроби. Фрагмент урока математики в 6 классе Гамильтоновы цепи в некоторых типах линейно-выпуклых графов
Гамильтоновы цепи в некоторых типах линейно-выпуклых графов Эконометрика, как наука
Эконометрика, как наука Несколько задач про цены
Несколько задач про цены Сочетания чисел
Сочетания чисел Решение одной задачи, не лишено здравого смысла
Решение одной задачи, не лишено здравого смысла Презентация на тему Знаки больше, меньше, равно (1 класс)
Презентация на тему Знаки больше, меньше, равно (1 класс)