- Перспективы применения роботов в эндоскопии

Содержание
- 2. Опыт применения роботов в хирургии Очевидные плюсы Минимальная инвазивность Удобство для хирурга Упрощение и ускорение разработанных
- 3. Направление развития роботов в эндоскопии Разработка систем, способных к активному движению (упрощение интубации кишки, уменьшение неприятных
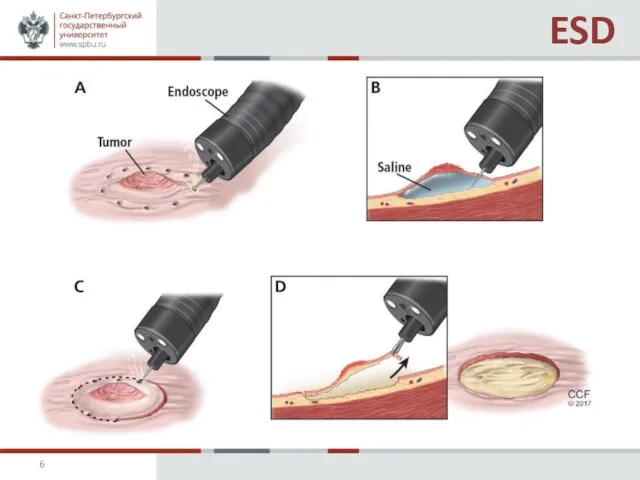
- 4. Важные сокращения ESD (Endoscopic Submucosal dissection) - эндоскопическая диссекция подслизистого слоя NOTES (Natural Orifice Translumenal Endoscopic
- 5. NOTES Наиболее активно развивающееся направление современной эндохирургии возникло на стыке лапароскопии и гибкой эндоскопии. Идеальная операция
- 6. ESD
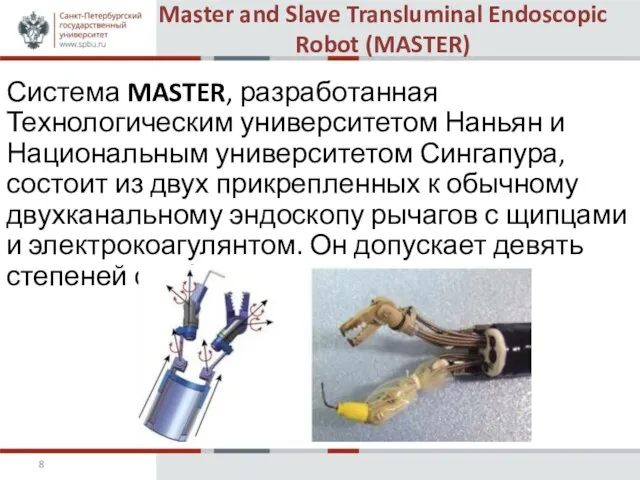
- 8. Master and Slave Transluminal Endoscopic Robot (MASTER) Система MASTER, разработанная Технологическим университетом Наньян и Национальным университетом
- 9. Master and Slave Transluminal Endoscopic Robot (MASTER) Для проведения манипуляции необходимо два эндоскописта. Один за консолью,
- 10. STRAS / Anubiscope TM Разработан научно-исследовательским институтом рака пищеварительной системы (IRCAD) совместно с Карлом Шторцем. Анубископ
- 11. STRAS / Anubiscope TM дистальный конец аппарата и ручки инструментов Кинематическая система
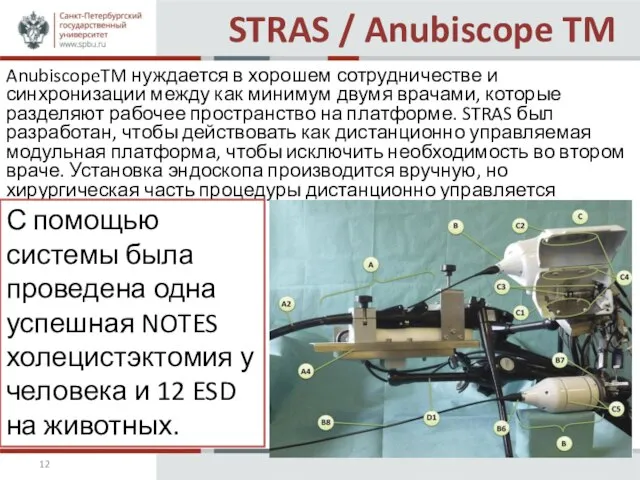
- 12. STRAS / Anubiscope TM AnubiscopeTM нуждается в хорошем сотрудничестве и синхронизации между как минимум двумя врачами,
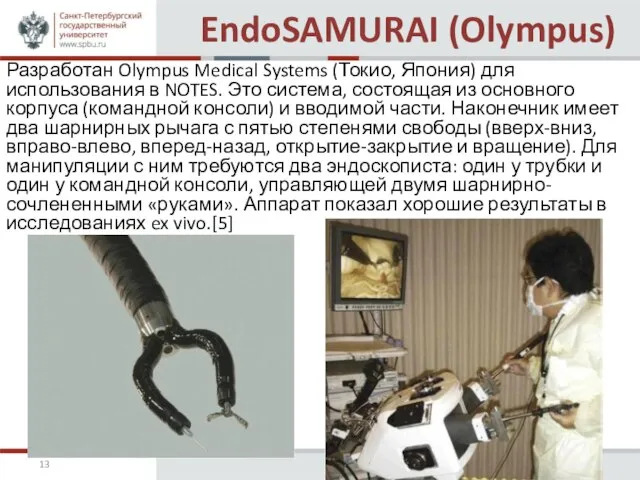
- 13. EndoSAMURAI (Olympus) Разработан Olympus Medical Systems (Токио, Япония) для использования в NOTES. Это система, состоящая из
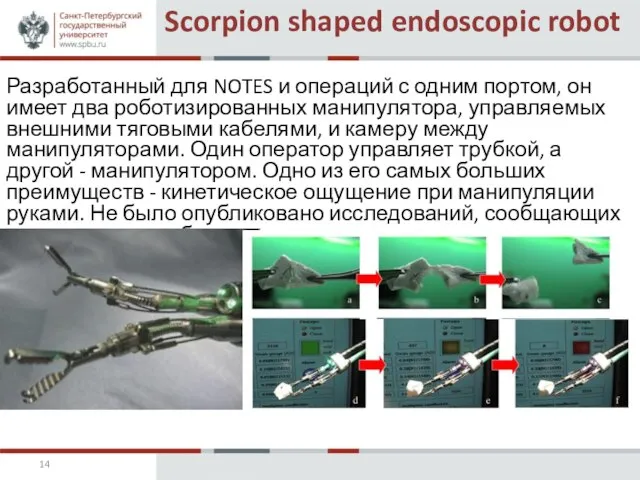
- 14. Scorpion shaped endoscopic robot Разработанный для NOTES и операций с одним портом, он имеет два роботизированных
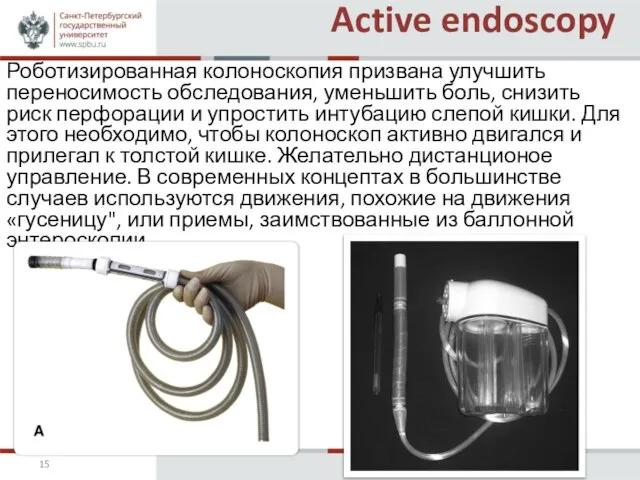
- 15. Active endoscopy Роботизированная колоноскопия призвана улучшить переносимость обследования, уменьшить боль, снизить риск перфорации и упростить интубацию
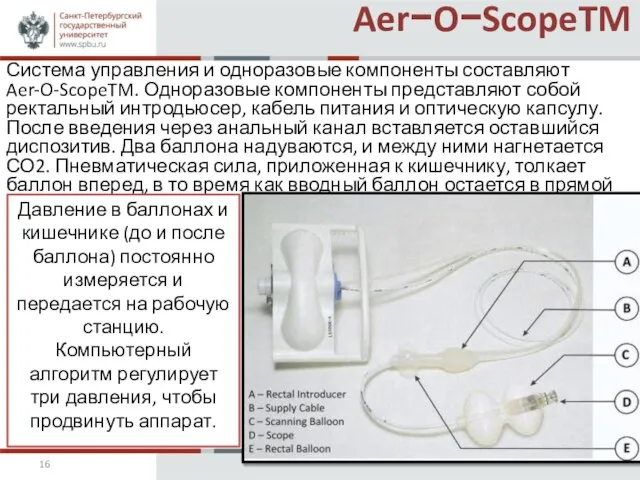
- 16. Aer−O−ScopeTM Система управления и одноразовые компоненты составляют Aer-O-ScopeTM. Одноразовые компоненты представляют собой ректальный интродьюсер, кабель питания
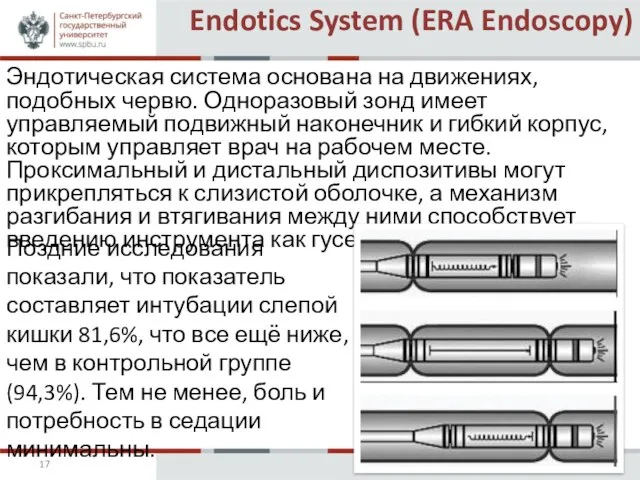
- 17. Endotics System (ERA Endoscopy) Эндотическая система основана на движениях, подобных червю. Одноразовый зонд имеет управляемый подвижный
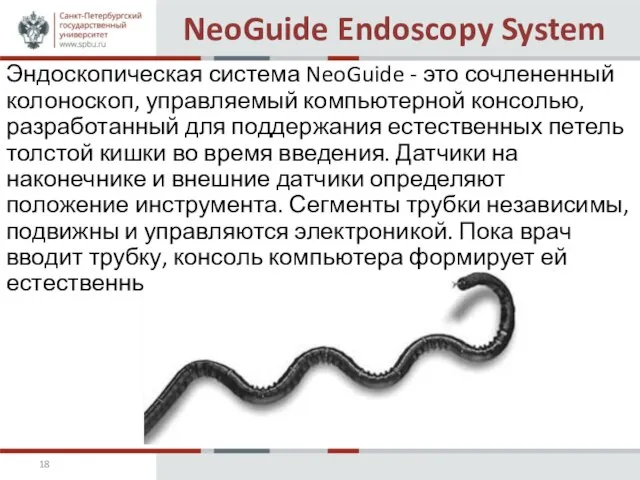
- 18. NeoGuide Endoscopy System Эндоскопическая система NeoGuide - это сочлененный колоноскоп, управляемый компьютерной консолью, разработанный для поддержания
- 19. Invendoscope (Germany) Invendoscope - это портативный одноразовый колоноскоп с приводом использующим двигатель. Восемь колес вне больного
- 20. Благодарю за внимание!
- 21. Литература Robotic endoscopy. A review of the literature. Thiago Arantes de Carvalho Visconti, José Pinhata Otoch
- 23. Скачать презентацию
Слайд 2Опыт применения роботов в хирургии
Очевидные плюсы
Минимальная инвазивность
Удобство для хирурга
Упрощение и ускорение
Опыт применения роботов в хирургии
Очевидные плюсы
Минимальная инвазивность
Удобство для хирурга
Упрощение и ускорение
Слайд 3Направление развития роботов в эндоскопии
Разработка систем, способных к активному движению (упрощение интубации
Направление развития роботов в эндоскопии
Разработка систем, способных к активному движению (упрощение интубации
Слайд 4Важные сокращения
ESD (Endoscopic Submucosal dissection) - эндоскопическая диссекция подслизистого слоя
NOTES (Natural Orifice Translumenal
Важные сокращения
ESD (Endoscopic Submucosal dissection) - эндоскопическая диссекция подслизистого слоя
NOTES (Natural Orifice Translumenal
Слайд 5NOTES
Наиболее активно развивающееся направление современной эндохирургии возникло на стыке лапароскопии и гибкой эндоскопии. Идеальная
NOTES
Наиболее активно развивающееся направление современной эндохирургии возникло на стыке лапароскопии и гибкой эндоскопии. Идеальная
Слайд 6ESD
ESD
Слайд 8Master and Slave Transluminal Endoscopic Robot (MASTER)
Система MASTER, разработанная Технологическим университетом Наньян
Master and Slave Transluminal Endoscopic Robot (MASTER)
Система MASTER, разработанная Технологическим университетом Наньян
Слайд 9Master and Slave Transluminal Endoscopic Robot (MASTER)
Для проведения манипуляции необходимо два эндоскописта.
Master and Slave Transluminal Endoscopic Robot (MASTER)
Для проведения манипуляции необходимо два эндоскописта.

Слайд 10STRAS / Anubiscope TM
Разработан научно-исследовательским институтом рака пищеварительной системы (IRCAD) совместно с
STRAS / Anubiscope TM
Разработан научно-исследовательским институтом рака пищеварительной системы (IRCAD) совместно с

Слайд 11STRAS / Anubiscope TM
дистальный конец аппарата и ручки инструментов
Кинематическая система
STRAS / Anubiscope TM
дистальный конец аппарата и ручки инструментов
Кинематическая система

Слайд 12STRAS / Anubiscope TM
AnubiscopeTM нуждается в хорошем сотрудничестве и синхронизации между как
STRAS / Anubiscope TM
AnubiscopeTM нуждается в хорошем сотрудничестве и синхронизации между как
Слайд 13EndoSAMURAI (Olympus)
Разработан Olympus Medical Systems (Токио, Япония) для использования в NOTES.
EndoSAMURAI (Olympus)
Разработан Olympus Medical Systems (Токио, Япония) для использования в NOTES.
Слайд 14Scorpion shaped endoscopic robot
Разработанный для NOTES и операций с одним портом, он
Scorpion shaped endoscopic robot
Разработанный для NOTES и операций с одним портом, он
Слайд 15Active endoscopy
Роботизированная колоноскопия призвана улучшить переносимость обследования, уменьшить боль, снизить риск перфорации
Active endoscopy
Роботизированная колоноскопия призвана улучшить переносимость обследования, уменьшить боль, снизить риск перфорации
Слайд 16Aer−O−ScopeTM
Система управления и одноразовые компоненты составляют Aer-O-ScopeTM. Одноразовые компоненты представляют собой ректальный
Aer−O−ScopeTM
Система управления и одноразовые компоненты составляют Aer-O-ScopeTM. Одноразовые компоненты представляют собой ректальный
Слайд 17Endotics System (ERA Endoscopy)
Эндотическая система основана на движениях, подобных червю. Одноразовый зонд
Endotics System (ERA Endoscopy)
Эндотическая система основана на движениях, подобных червю. Одноразовый зонд
Слайд 18NeoGuide Endoscopy System
Эндоскопическая система NeoGuide - это сочлененный колоноскоп, управляемый компьютерной консолью,
NeoGuide Endoscopy System
Эндоскопическая система NeoGuide - это сочлененный колоноскоп, управляемый компьютерной консолью,
Слайд 19Invendoscope (Germany)
Invendoscope - это портативный одноразовый колоноскоп с приводом использующим двигатель. Восемь
Invendoscope (Germany)
Invendoscope - это портативный одноразовый колоноскоп с приводом использующим двигатель. Восемь

Слайд 20Благодарю за внимание!
Благодарю за внимание!
Слайд 21Литература
Robotic endoscopy. A review of the literature. Thiago Arantes de Carvalho Visconti, José
Литература
Robotic endoscopy. A review of the literature. Thiago Arantes de Carvalho Visconti, José
 Кардиоренальный анемический синдром
Кардиоренальный анемический синдром Наследственные энзимопатии. Лабораторная диагностика
Наследственные энзимопатии. Лабораторная диагностика KAZ-German Society Послеоперационное наблюдение и обезболивание
KAZ-German Society Послеоперационное наблюдение и обезболивание Проведение смывов с предметов и рук. Взятие подногтевого соскоба
Проведение смывов с предметов и рук. Взятие подногтевого соскоба Ботулизм
Ботулизм Гинекологиядағы тексеру әдістері
Гинекологиядағы тексеру әдістері Пролапс митрального клапана и дизъюнкция. Оценка рисков ВСС
Пролапс митрального клапана и дизъюнкция. Оценка рисков ВСС Методы клинической генетики в диагностике умственной отсталости
Методы клинической генетики в диагностике умственной отсталости Организация медицинского страхования в РФ
Организация медицинского страхования в РФ Лечебно-охранительный режим ЛПУ и его значение для пациента
Лечебно-охранительный режим ЛПУ и его значение для пациента Симптоматология хронической сердечной недостаточности с разными значениями фракции выброса. Взгляд кардиолога и невролога
Симптоматология хронической сердечной недостаточности с разными значениями фракции выброса. Взгляд кардиолога и невролога Заболеваняи глотки
Заболеваняи глотки Пузырек
Пузырек Этика. Сестринское дело
Этика. Сестринское дело Роль основных пищевых веществ в жизнедеятельности организма
Роль основных пищевых веществ в жизнедеятельности организма Yellow fever vaccine – past, present & future
Yellow fever vaccine – past, present & future Раны. Определение. Классификация. Общие и местные симптомы. Принципы лечения
Раны. Определение. Классификация. Общие и местные симптомы. Принципы лечения Акароз - зудневая чесотка
Акароз - зудневая чесотка Патогенез себореи
Патогенез себореи Гигиеническое обучение работников объектов спорта
Гигиеническое обучение работников объектов спорта Сестринский уход в процессе лечения повреждений глазного яблока. Лекция 9
Сестринский уход в процессе лечения повреждений глазного яблока. Лекция 9 Оказание первой медицинской и доврачебной помощи при травмах головы
Оказание первой медицинской и доврачебной помощи при травмах головы Роль магнитного поля в медицине
Роль магнитного поля в медицине Особенности организации борьбы с инфекционными заболеваниями в РФ
Особенности организации борьбы с инфекционными заболеваниями в РФ Гипертензивные расстройства во время беременности, в родах и послеродовом периоде
Гипертензивные расстройства во время беременности, в родах и послеродовом периоде Морфофункциональная характеристика аппарата движения. Остеология. Скелет черепа
Морфофункциональная характеристика аппарата движения. Остеология. Скелет черепа Научный эксперимент: наследственные болезни человека
Научный эксперимент: наследственные болезни человека Здоровое пищевое поведение: мифы и реальность
Здоровое пищевое поведение: мифы и реальность