- Система управления лапараскопом

Содержание
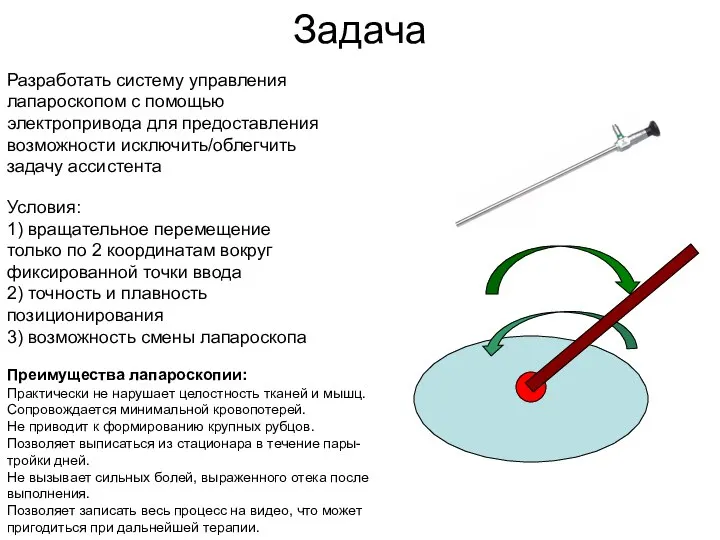
- 2. Задача Разработать систему управления лапароскопом с помощью электропривода для предоставления возможности исключить/облегчить задачу ассистента Условия: 1)
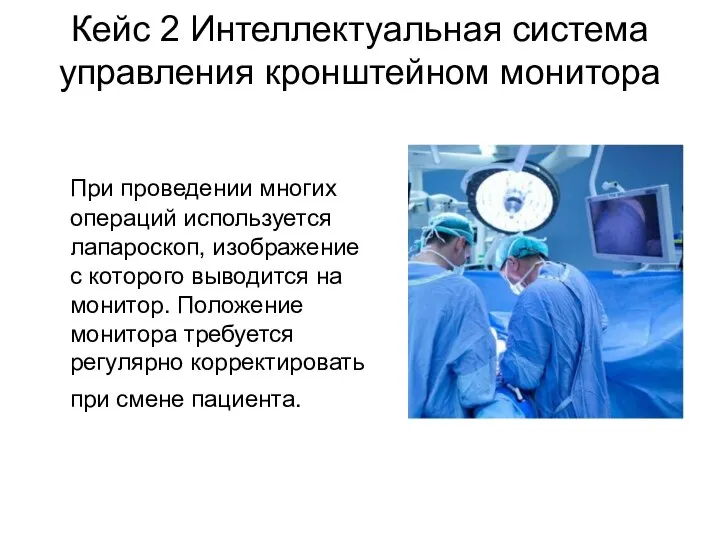
- 3. Кейс 2 Интеллектуальная система управления кронштейном монитора При проведении многих операций используется лапароскоп, изображение с которого
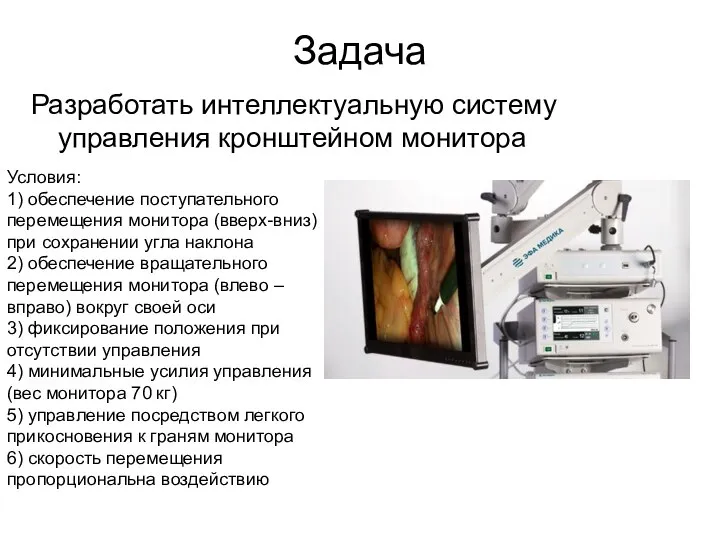
- 4. Задача Разработать интеллектуальную систему управления кронштейном монитора Условия: 1) обеспечение поступательного перемещения монитора (вверх-вниз) при сохранении
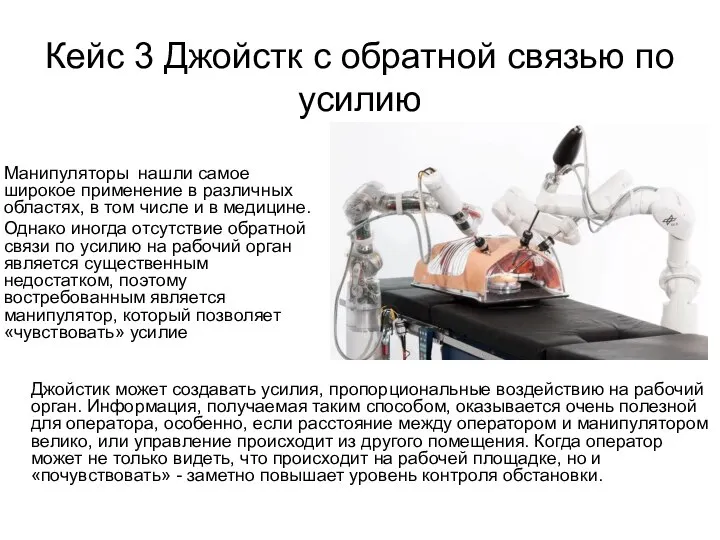
- 5. Кейс 3 Джойстк с обратной связью по усилию Манипуляторы нашли самое широкое применение в различных областях,
- 7. Скачать презентацию
Слайд 2Задача
Разработать систему управления лапароскопом с помощью электропривода для предоставления возможности исключить/облегчить задачу
Задача
Разработать систему управления лапароскопом с помощью электропривода для предоставления возможности исключить/облегчить задачу
Слайд 3Кейс 2 Интеллектуальная система управления кронштейном монитора
При проведении многих операций используется лапароскоп,
Кейс 2 Интеллектуальная система управления кронштейном монитора
При проведении многих операций используется лапароскоп,
Слайд 4Задача
Разработать интеллектуальную систему управления кронштейном монитора
Условия:
1) обеспечение поступательного перемещения монитора (вверх-вниз)
Задача
Разработать интеллектуальную систему управления кронштейном монитора
Условия:
1) обеспечение поступательного перемещения монитора (вверх-вниз)
Слайд 5Кейс 3 Джойстк с обратной связью по усилию
Манипуляторы нашли самое широкое применение
Кейс 3 Джойстк с обратной связью по усилию
Манипуляторы нашли самое широкое применение
 Анализ смертности населения Калининградской области
Анализ смертности населения Калининградской области Бронхиальная астма
Бронхиальная астма Желчекаменная болезнь
Желчекаменная болезнь Клиническая фармакология лекарственных средств, влияющих на водно-солевой обмен
Клиническая фармакология лекарственных средств, влияющих на водно-солевой обмен Электрокардиограммы
Электрокардиограммы Особенности сестринской деятельности при желчнокаменной болезни
Особенности сестринской деятельности при желчнокаменной болезни Люди дождя
Люди дождя Физиология выделения
Физиология выделения Острая сердечно-сосудистая недостаточность
Острая сердечно-сосудистая недостаточность Спорынья (Claviceps). Фармакологические свойства
Спорынья (Claviceps). Фармакологические свойства Классификация переломов. Осложнения переломов. Регенерация костной ткани
Классификация переломов. Осложнения переломов. Регенерация костной ткани Сестринская помощь при ревматоидном полиартрите
Сестринская помощь при ревматоидном полиартрите Рентгеноанатомия грудной клетки
Рентгеноанатомия грудной клетки Микробиологические основы химиопрофилактики и химиотерапии инфекционных болезней
Микробиологические основы химиопрофилактики и химиотерапии инфекционных болезней Применение методов молекулярной биологии в исследовании
Применение методов молекулярной биологии в исследовании Биохимический и гематологический профиль при болезнях обмена веществ
Биохимический и гематологический профиль при болезнях обмена веществ Образцы логопедических заключений
Образцы логопедических заключений Первая помощь при травмах опорно-двигательной системы
Первая помощь при травмах опорно-двигательной системы Сшивающие аппараты
Сшивающие аппараты Нервная система. Спинномозговые нервы
Нервная система. Спинномозговые нервы Результаты молекулярно-эпидемиологического мониторинга энтеровирусной инфекции
Результаты молекулярно-эпидемиологического мониторинга энтеровирусной инфекции Канис-терапия особым детям Лапа помощи
Канис-терапия особым детям Лапа помощи Деятельность педагога-психолога в работе службы школьной медиации
Деятельность педагога-психолога в работе службы школьной медиации Искусственное дыхание методом рот в рот, рот в нос
Искусственное дыхание методом рот в рот, рот в нос Насвай. Его последствия…
Насвай. Его последствия… Синдром Ван Дер Вуда
Синдром Ван Дер Вуда Паразиты человека
Паразиты человека Краткие сведения о рецепте
Краткие сведения о рецепте