- Человек и робот – диалог и кооперативное управление

Содержание
- 2. «Интелектуальный» автономный робот – это мобильное устройство для самостоятельного выполнения сложных операций в недетерминированных условиях под
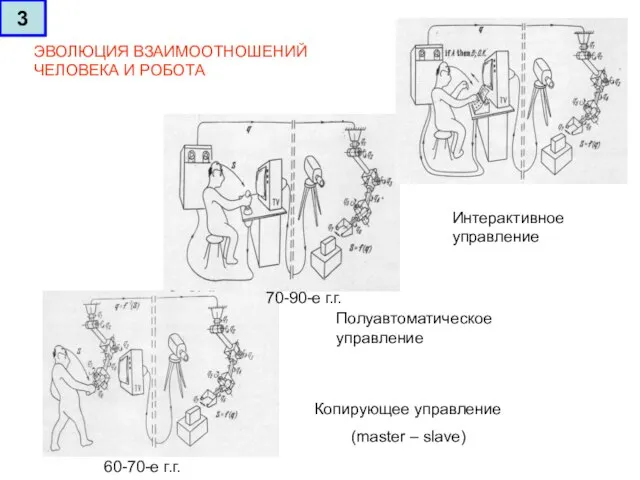
- 3. ЭВОЛЮЦИЯ ВЗАИМООТНОШЕНИЙ ЧЕЛОВЕКА И РОБОТА Копирующее управление (master – slave) Полуавтоматическое управление Интерактивное управление 60-70-е г.г.
- 4. Возможные области применения: Спасательные операции в экстремальных ситуациях (пожар, техногенные аварии и т.п.) Борьба с проявлениями
- 5. Автономный робот для выполнения манипуляционных операций на местности под контролем человека («Богомол» ГосНИИФТП) сенсоры манипулятор движитель
- 6. Внутрицеховой мобильный робот для безлюдного производства Система отображения информации Пульт управления Оператор-диспетчер 6
- 7. Медицинский робот для проведения хирургических операций Манипуляторы Рабочий инструмент Сенсоры Пост управления Человек-оператор 7
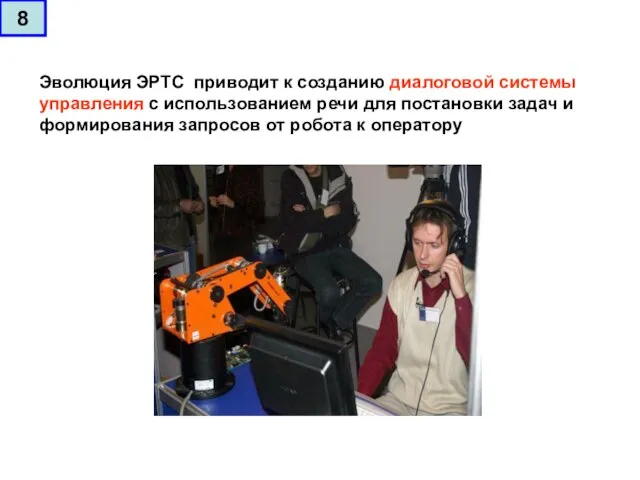
- 8. Эволюция ЭРТС приводит к созданию диалоговой системы управления с использованием речи для постановки задач и формирования
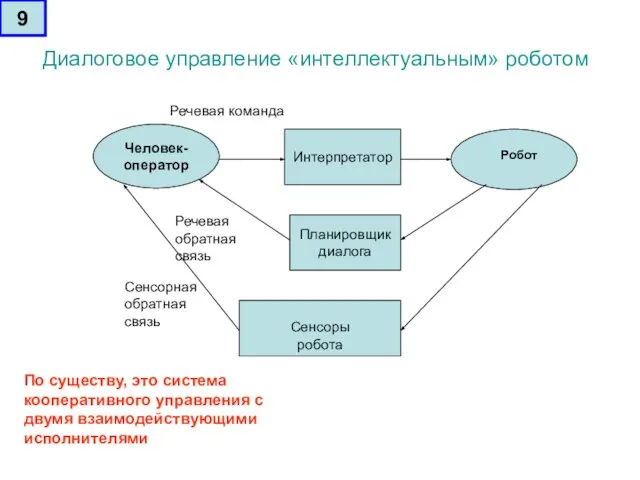
- 9. Диалоговое управление «интеллектуальным» роботом Человек- оператор Речевая команда Интерпретатор Робот Планировщик диалога Сенсоры робота Речевая обратная
- 10. Кооперативное управление - термин из теории многоагентных систем: - Это организация взаимодействия между агентами, необходимого для
- 11. Примером многоагентной системы, включающей людей и роботов может быть система противопожарного назначения 11
- 12. Двухуровневая архитектура пожарной робототехнической системы управления Оператор-координатор Стратегический уровень управления Тактический уровень управления 12
- 13. Интерпретация цели, организация диалога Обобщенная оценка ситуации База знаний: -внешний мир -возможности системы -элементарные операции -
- 14. Особенности организации диалогового управления ЭРИС Информация об окружающем мире заранее неизвестна и в процессе работы может
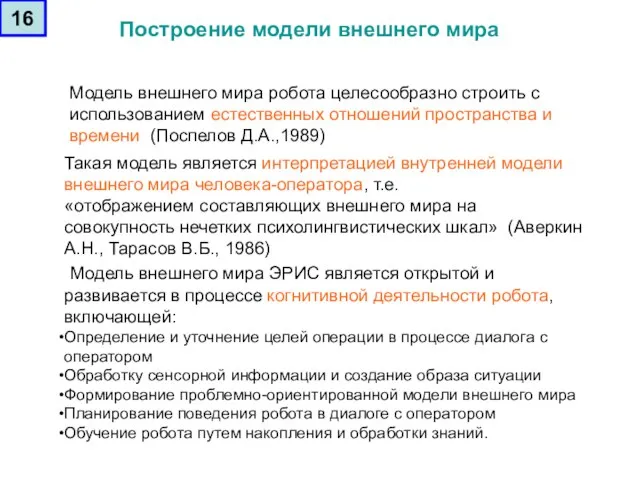
- 15. Задачи, рассматриваемые в теории эргатических робототехнических интеллектуальных систем (ЭРИС) Построение модели внешнего мира с использованием естественных
- 16. Такая модель является интерпретацией внутренней модели внешнего мира человека-оператора, т.е. «отображением составляющих внешнего мира на совокупность
- 17. Естественные пространственные отношения определяются путем экспериментального анализа восприятия этих отношений человеком Заметим, что эксперименты подтверждают правило
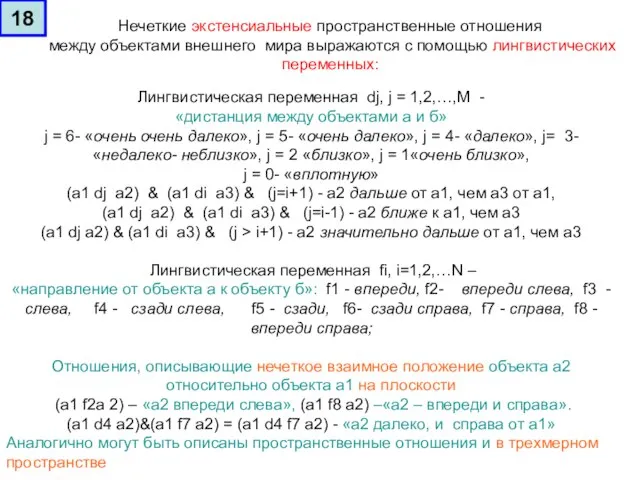
- 18. Лингвистическая переменная dj, j = 1,2,…,M - «дистанция между объектами а и б» j = 6-
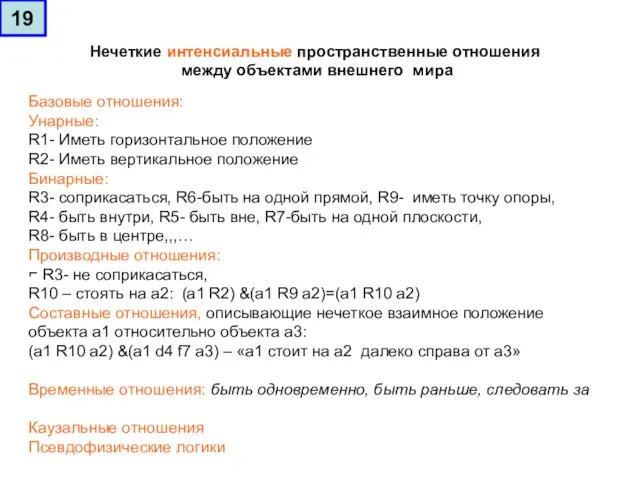
- 19. Базовые отношения: Унарные: R1- Иметь горизонтальное положение R2- Иметь вертикальное положение Бинарные: R3- соприкасаться, R6-быть на
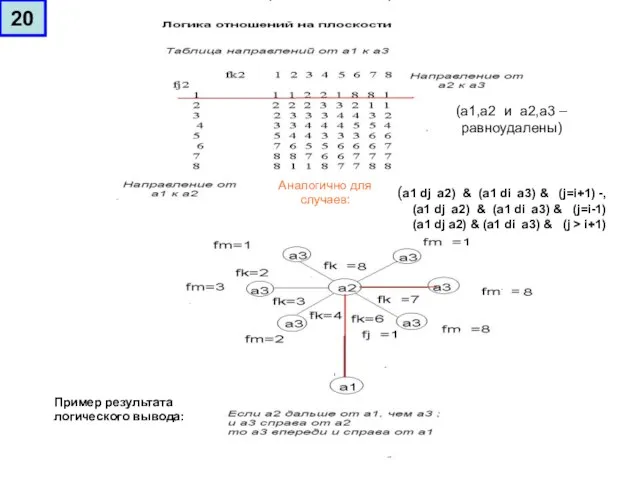
- 20. (а1,а2 и а2,а3 – равноудалены) (а1 dj а2) & (а1 di а3) & (j=i+1) -, (а1
- 21. Семиотическая форма описания: Ao – наблюдатель,R8 – быть на поверхности, d5 – быть далеко, f7 -
- 22. Описание ситуации оператором с помощью нечетких пространственных отношений, «нечеткая карта местности» а6 а2 а5 а3 а4
- 23. Ситуационное управление мобильным роботом осуществляется по продукционным правилам в зависимости от текущей ситуации в рабочей зоне
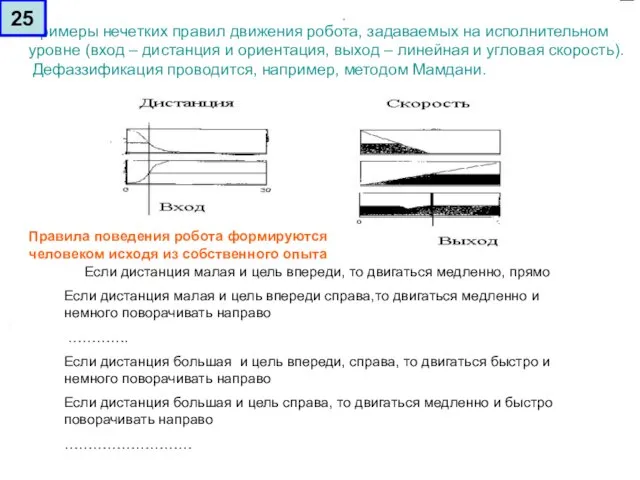
- 24. Управление мобильным роботом на исполнительном уровне Сигналы измерений и сигналы управления непрерывны, что позволяет обеспечить устойчивый
- 25. Если дистанция малая и цель впереди, то двигаться медленно, прямо Если дистанция малая и цель впереди
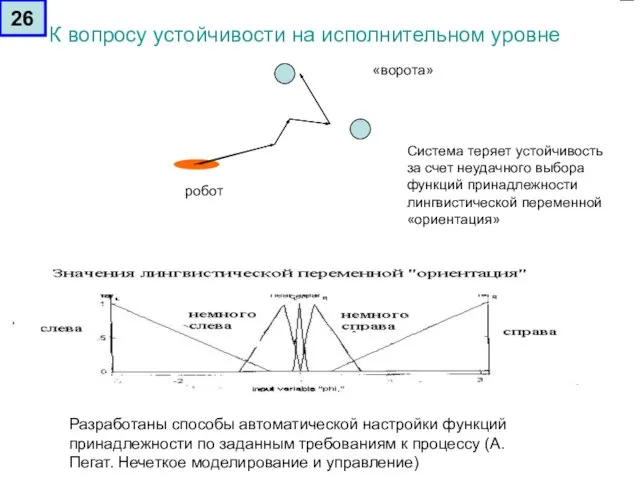
- 26. К вопросу устойчивости на исполнительном уровне Система теряет устойчивость за счет неудачного выбора функций принадлежности лингвистической
- 27. Типовые (рефлекторные) движения мобильного робота на исполнительном уровне могут быть легко заданы системой правил-продукций с использованием
- 28. В случае манипуляционных операций диапазон выполняемых типовых операций существенно расширяется, что позволяет ввести термин: «деятельность» манипуляционных
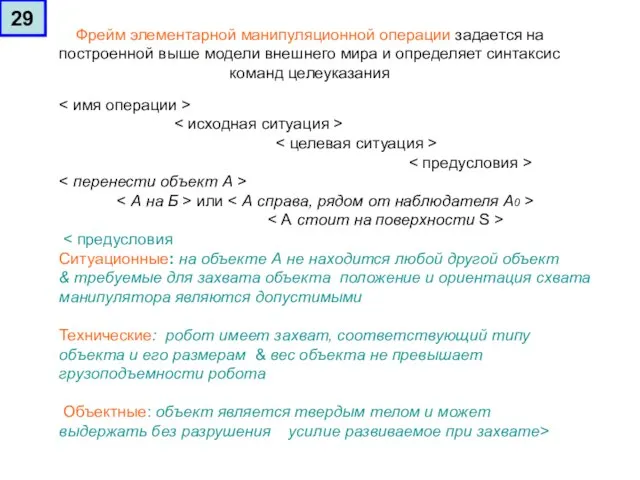
- 29. или Ситуационные: на объекте А не находится любой другой объект & требуемые для захвата объекта положение
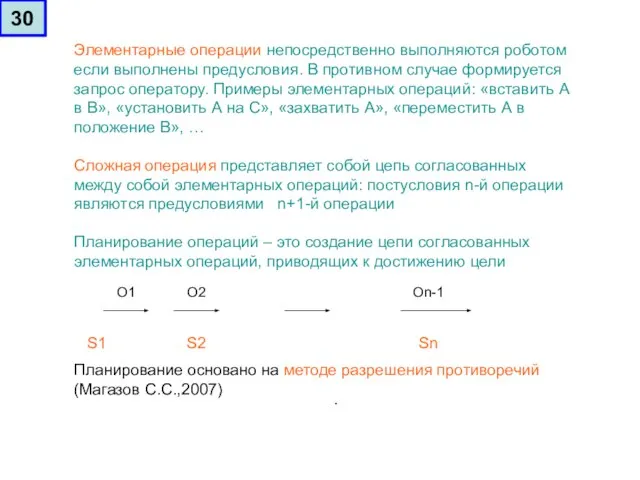
- 30. Элементарные операции непосредственно выполняются роботом если выполнены предусловия. В противном случае формируется запрос оператору. Примеры элементарных
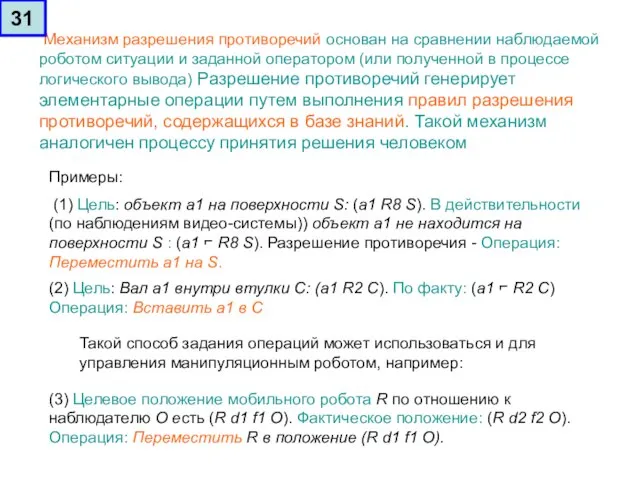
- 31. Механизм разрешения противоречий основан на сравнении наблюдаемой роботом ситуации и заданной оператором (или полученной в процессе
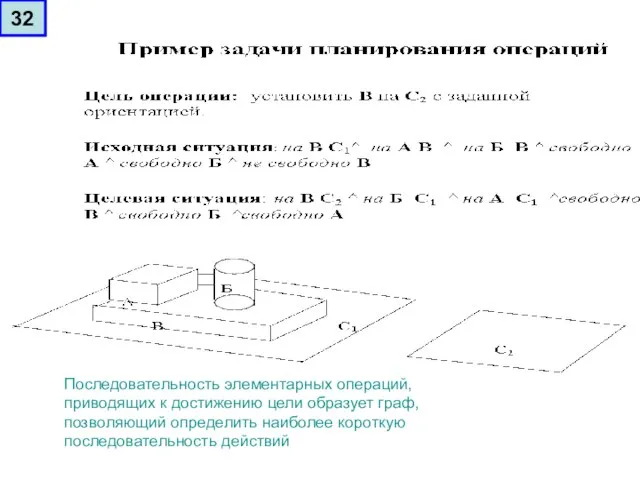
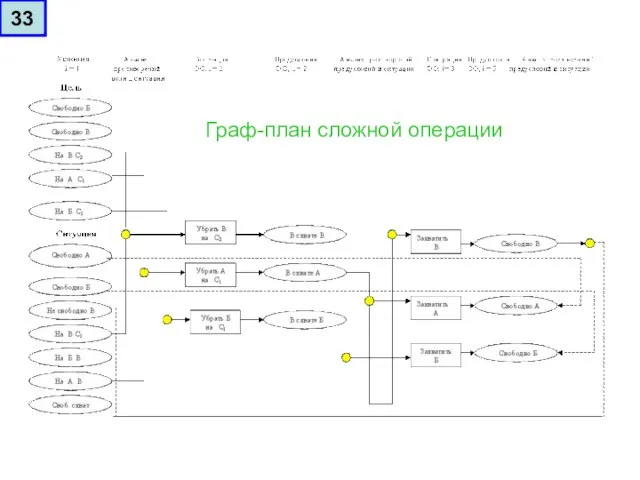
- 32. 32 Последовательность элементарных операций, приводящих к достижению цели образует граф, позволяющий определить наиболее короткую последовательность действий
- 33. Граф-план сложной операции 33
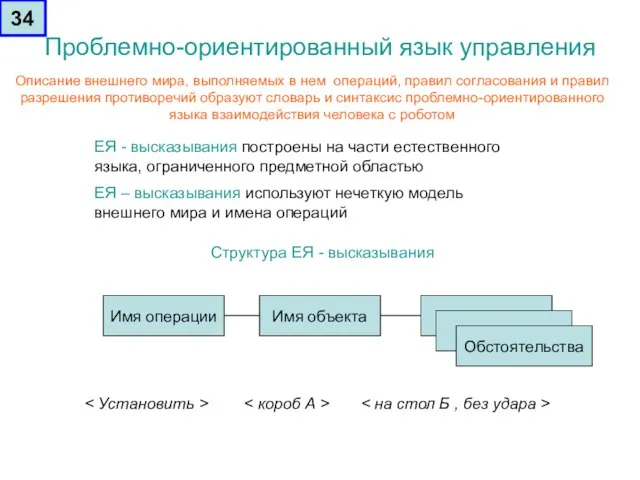
- 34. Проблемно-ориентированный язык управления ЕЯ - высказывания построены на части естественного языка, ограниченного предметной областью ЕЯ –
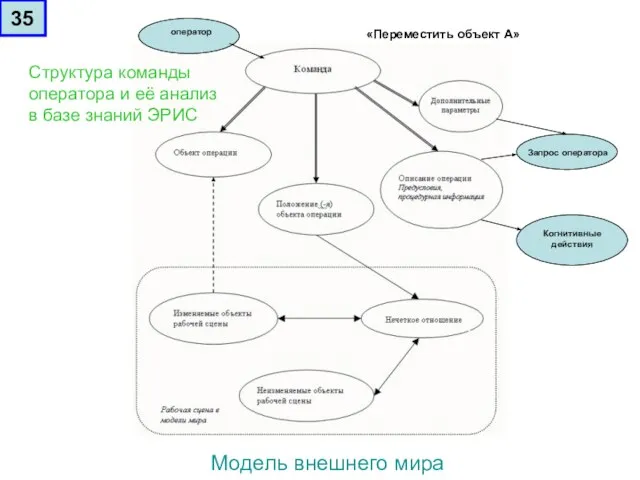
- 35. Структура команды оператора и её анализ в базе знаний ЭРИС 35 «Переместить объект А» Модель внешнего
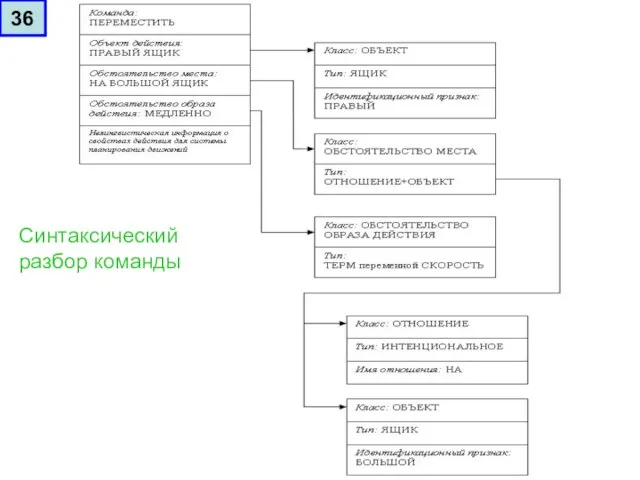
- 36. Синтаксический разбор команды 36
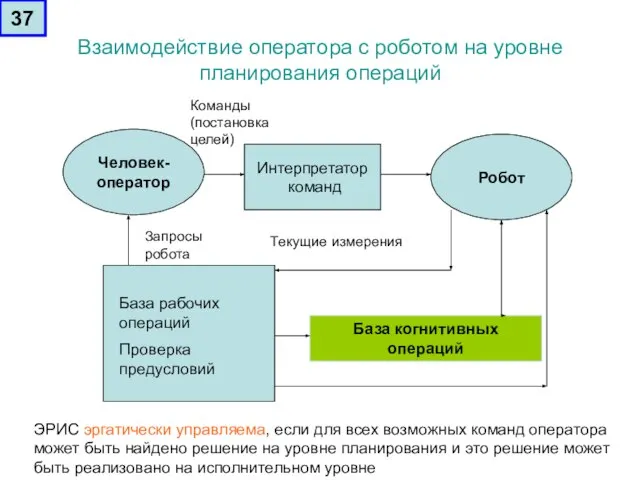
- 37. Взаимодействие оператора с роботом на уровне планирования операций Человек- оператор Интерпретатор команд Робот База рабочих операций
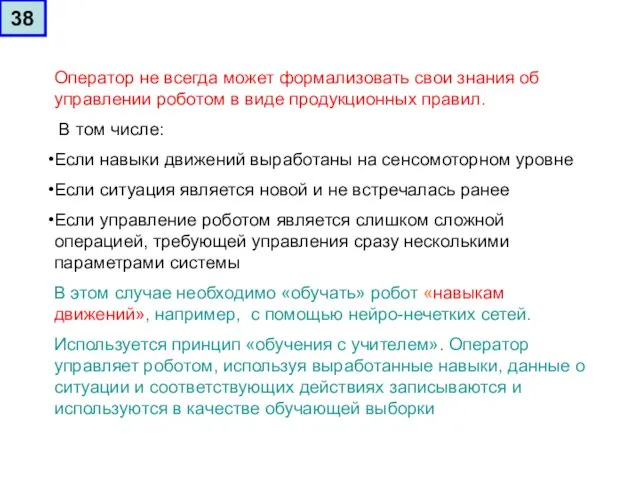
- 38. Оператор не всегда может формализовать свои знания об управлении роботом в виде продукционных правил. В том
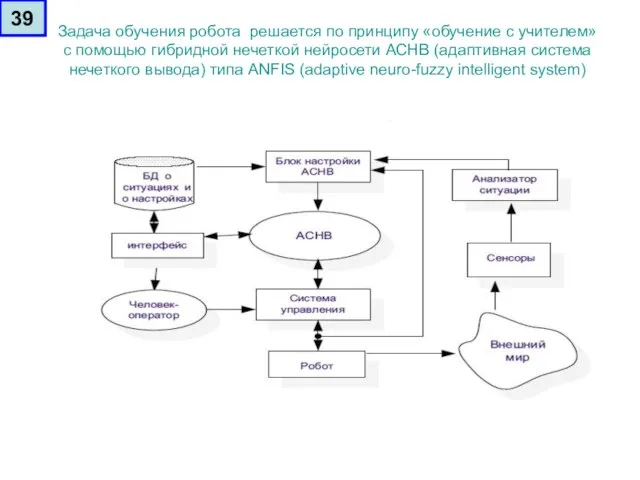
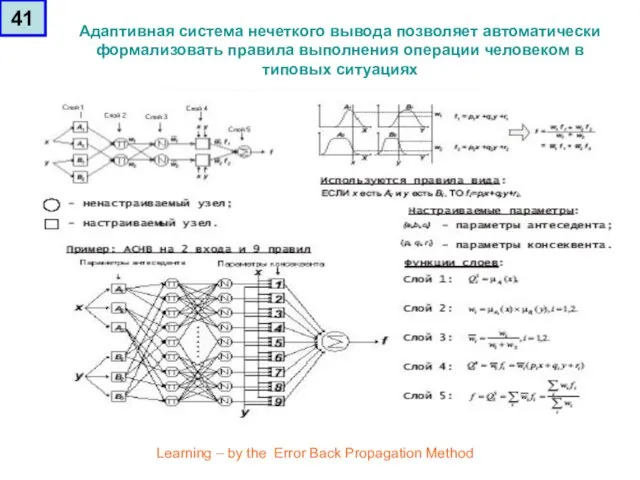
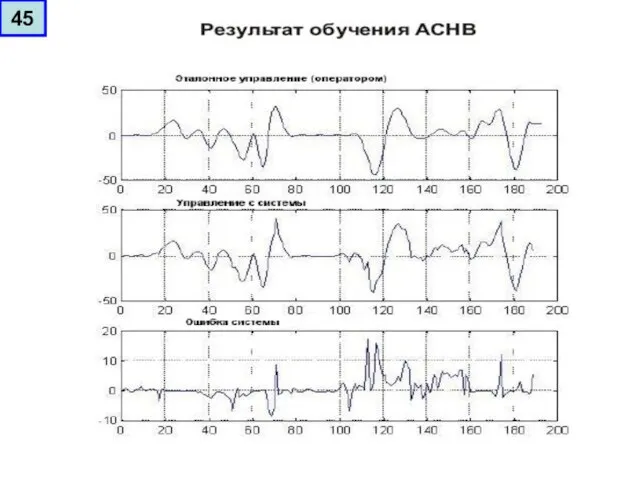
- 39. Задача обучения робота решается по принципу «обучение с учителем» с помощью гибридной нечеткой нейросети АСНВ (адаптивная
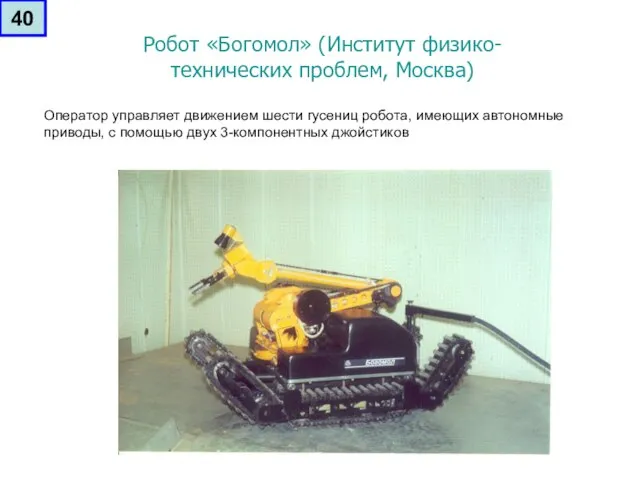
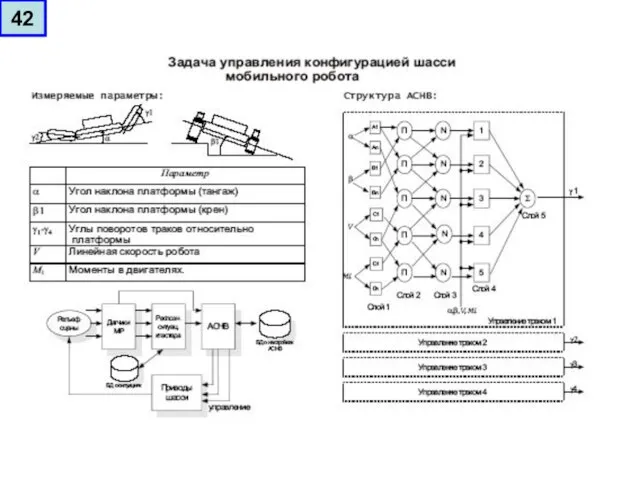
- 40. Робот «Богомол» (Институт физико-технических проблем, Москва) Оператор управляет движением шести гусениц робота, имеющих автономные приводы, с
- 41. Адаптивная система нечеткого вывода позволяет автоматически формализовать правила выполнения операции человеком в типовых ситуациях Learning –
- 42. 42
- 43. 43
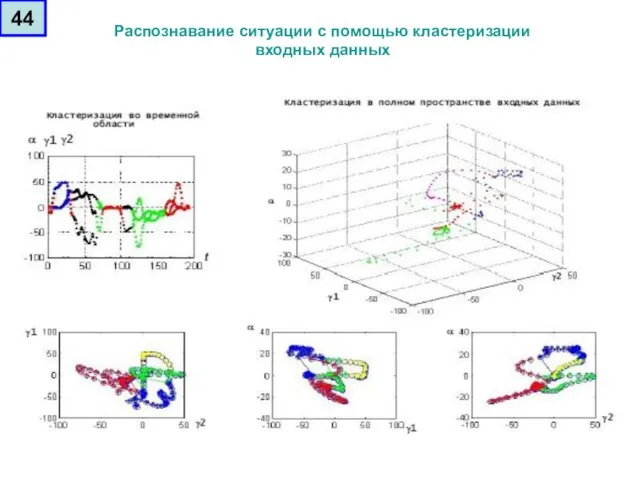
- 44. Распознавание ситуации с помощью кластеризации входных данных 44
- 45. 45
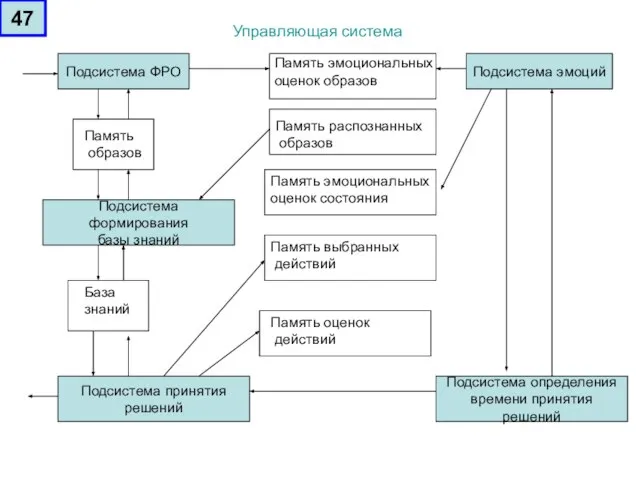
- 46. Метод автономного адаптивного управления применяется в тех случаях, когда вообще отсутствует априорная информация об условиях работы
- 47. Управляющая система Подсистема ФРО Память эмоциональных оценок образов Память эмоциональных оценок состояния Память распознанных образов Память
- 48. Компьютерная модель самообучающегося робота «визуальный» датчик 1 «визуальный» датчик 2 «визуальный» датчик 3 Тактильный датчик 1
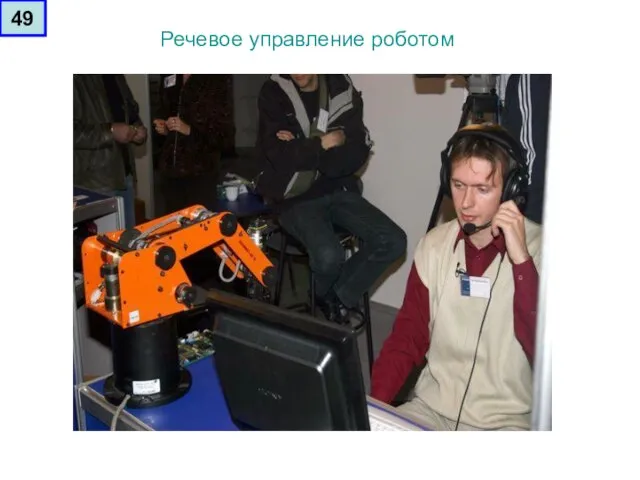
- 49. Речевое управление роботом 49
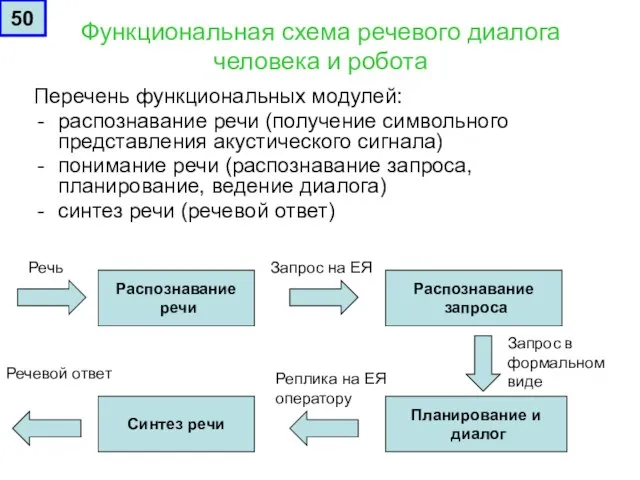
- 50. Функциональная схема речевого диалога человека и робота Перечень функциональных модулей: распознавание речи (получение символьного представления акустического
- 51. Методы распознавания речи Варианты постановки задач: - настройка на диктора; количество слов; изолированность произнесения; шумовые условия.
- 52. Осциллограмма речевого сигнала Слово: восемнадцать Осциллограмма Предварительная фильтрация 52
- 53. 53
- 54. Динамическое искажение времени и АЛП 54
- 55. Формирование вектора признаков звуков /а/ /c/ /ц/ 55
- 56. Кодирование Код символа S[i] есть 10100000 в двоичной системе или 160 в десятичной 56
- 57. Функциональная схема системы речевого диалогового управления Оператор Робот Распознавание речи Понимание речи Управление диалогом Управление роботом
- 58. Использование априорной информации о синтаксисе и структуре диалога Причины ошибок распознавания речи: - шум; - речь
- 59. Анализ требований к распознаванию речи. Требования к распознаванию речи применительно к управлению роботами размер словаря до
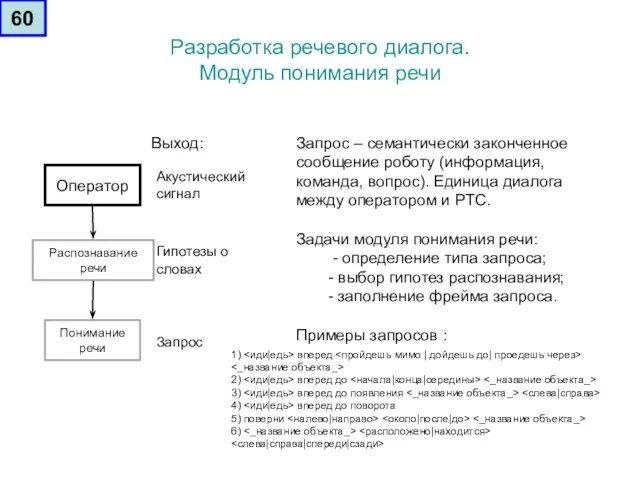
- 60. Разработка речевого диалога. Модуль понимания речи Оператор Распознавание речи Понимание речи Выход: Акустический сигнал Гипотезы о
- 61. Сценарий диалога – совокупность состояний диалога (от начального до конечного) и переходов между ними. Примеры сценариев:
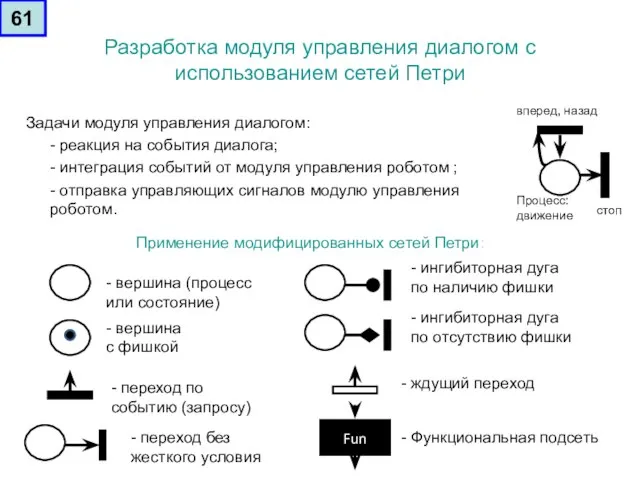
- 62. Задачи модуля управления диалогом: - реакция на события диалога; - интеграция событий от модуля управления роботом
- 63. Пример применения управляющей сети Петри для организации речевого диалога между оператором и роботом. RecErr ACT OUT
- 64. «Понимание» роботом команд человека Восприятие и правильная интерпретация речевого сигнала, составляющего команду (заполнение фрейма).Проверка корректности команды
- 65. ЗАДАЧИ НА БЛИЖАЙШУЮ ПЕРСПЕКТИВУ От управления роботами к диалогу. Диалоговое управление «интеллектуальными» роботами. Проблема взаимопонимания. Обучение
- 67. Скачать презентацию
Слайд 2«Интелектуальный» автономный робот – это мобильное устройство для самостоятельного выполнения сложных операций
«Интелектуальный» автономный робот – это мобильное устройство для самостоятельного выполнения сложных операций
Слайд 3ЭВОЛЮЦИЯ ВЗАИМООТНОШЕНИЙ ЧЕЛОВЕКА И РОБОТА
Копирующее управление
(master – slave)
Полуавтоматическое управление
Интерактивное управление
60-70-е г.г.
70-90-е г.г.
3
ЭВОЛЮЦИЯ ВЗАИМООТНОШЕНИЙ ЧЕЛОВЕКА И РОБОТА
Копирующее управление
(master – slave)
Полуавтоматическое управление
Интерактивное управление
60-70-е г.г.
70-90-е г.г.
3
Слайд 4Возможные области применения:
Спасательные операции в экстремальных ситуациях (пожар, техногенные аварии и т.п.)
Борьба
Возможные области применения:
Спасательные операции в экстремальных ситуациях (пожар, техногенные аварии и т.п.)
Борьба
Слайд 5Автономный робот для выполнения манипуляционных операций на местности под контролем человека («Богомол»
Автономный робот для выполнения манипуляционных операций на местности под контролем человека («Богомол»

Слайд 6Внутрицеховой мобильный робот для безлюдного производства
Система отображения информации
Пульт управления
Оператор-диспетчер
6
Внутрицеховой мобильный робот для безлюдного производства
Система отображения информации
Пульт управления
Оператор-диспетчер
6

Слайд 7Медицинский робот для проведения хирургических операций
Манипуляторы
Рабочий инструмент
Сенсоры
Пост управления
Человек-оператор
7
Медицинский робот для проведения хирургических операций
Манипуляторы
Рабочий инструмент
Сенсоры
Пост управления
Человек-оператор
7

Слайд 8Эволюция ЭРТС приводит к созданию диалоговой системы управления с использованием речи для
Эволюция ЭРТС приводит к созданию диалоговой системы управления с использованием речи для
Слайд 9Диалоговое управление «интеллектуальным» роботом
Человек-
оператор
Речевая команда
Интерпретатор
Робот
Планировщик
диалога
Сенсоры робота
Речевая обратная связь
Сенсорная обратная связь
9
По существу,
Диалоговое управление «интеллектуальным» роботом
Человек-
оператор
Речевая команда
Интерпретатор
Робот
Планировщик
диалога
Сенсоры робота
Речевая обратная связь
Сенсорная обратная связь
9
По существу,
Слайд 10Кооперативное управление - термин из теории многоагентных систем:
- Это организация взаимодействия между
Кооперативное управление - термин из теории многоагентных систем:
- Это организация взаимодействия между
Слайд 11Примером многоагентной системы, включающей людей и роботов может быть система противопожарного назначения
11
Примером многоагентной системы, включающей людей и роботов может быть система противопожарного назначения
11

Слайд 12Двухуровневая архитектура пожарной робототехнической системы управления
Оператор-координатор
Стратегический уровень управления
Тактический уровень управления
12
Двухуровневая архитектура пожарной робототехнической системы управления
Оператор-координатор
Стратегический уровень управления
Тактический уровень управления
12

Слайд 13Интерпретация цели, организация диалога
Обобщенная
оценка
ситуации
База знаний:
-внешний мир
-возможности системы
-элементарные операции
- типовые алгоритмы управления
-продукционные
Интерпретация цели, организация диалога
Обобщенная
оценка
ситуации
База знаний:
-внешний мир
-возможности системы
-элементарные операции
- типовые алгоритмы управления
-продукционные

Слайд 14Особенности организации диалогового управления ЭРИС
Информация об окружающем мире заранее неизвестна и в
Особенности организации диалогового управления ЭРИС
Информация об окружающем мире заранее неизвестна и в
Слайд 15Задачи, рассматриваемые в теории эргатических робототехнических интеллектуальных систем (ЭРИС)
Построение модели внешнего мира
Задачи, рассматриваемые в теории эргатических робототехнических интеллектуальных систем (ЭРИС)
Построение модели внешнего мира
Слайд 16Такая модель является интерпретацией внутренней модели внешнего мира человека-оператора, т.е.
«отображением составляющих
Такая модель является интерпретацией внутренней модели внешнего мира человека-оператора, т.е.
«отображением составляющих
Слайд 17Естественные пространственные отношения определяются путем
экспериментального анализа восприятия этих отношений человеком
Заметим, что
Естественные пространственные отношения определяются путем
экспериментального анализа восприятия этих отношений человеком
Заметим, что

Слайд 18Лингвистическая переменная dj, j = 1,2,…,M -
«дистанция между объектами а и б»
j
Лингвистическая переменная dj, j = 1,2,…,M -
«дистанция между объектами а и б»
j
Слайд 19Базовые отношения:
Унарные:
R1- Иметь горизонтальное положение
R2- Иметь вертикальное положение
Бинарные:
R3- соприкасаться, R6-быть на одной
Базовые отношения:
Унарные:
R1- Иметь горизонтальное положение
R2- Иметь вертикальное положение
Бинарные:
R3- соприкасаться, R6-быть на одной
Слайд 20(а1,а2 и а2,а3 – равноудалены)
(а1 dj а2) & (а1 di а3) &
(а1,а2 и а2,а3 – равноудалены)
(а1 dj а2) & (а1 di а3) &
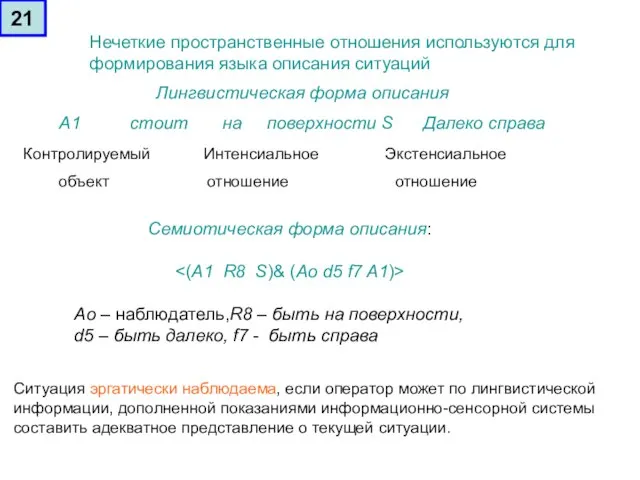
Слайд 21Семиотическая форма описания:
<(A1 R8 S)& (Ao d5 f7 A1)>
Ao – наблюдатель,R8 –
Семиотическая форма описания:
<(A1 R8 S)& (Ao d5 f7 A1)>
Ao – наблюдатель,R8 –
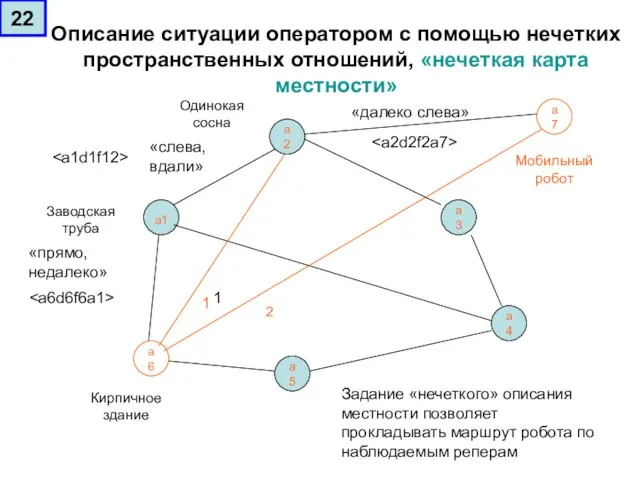
Слайд 22Описание ситуации оператором с помощью нечетких пространственных отношений, «нечеткая карта местности»
а6
а2
а5
а3
а4
а1
а7
1
1
Кирпичное
Описание ситуации оператором с помощью нечетких пространственных отношений, «нечеткая карта местности»
а6
а2
а5
а3
а4
а1
а7 1 1 Кирпичное
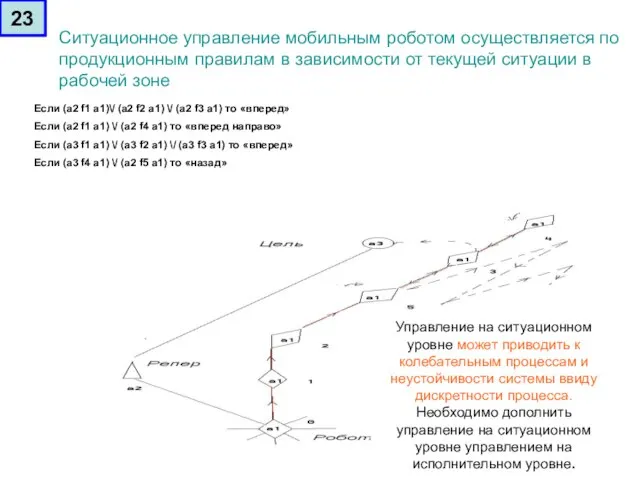
Слайд 23Ситуационное управление мобильным роботом осуществляется по продукционным правилам в зависимости от текущей
Ситуационное управление мобильным роботом осуществляется по продукционным правилам в зависимости от текущей
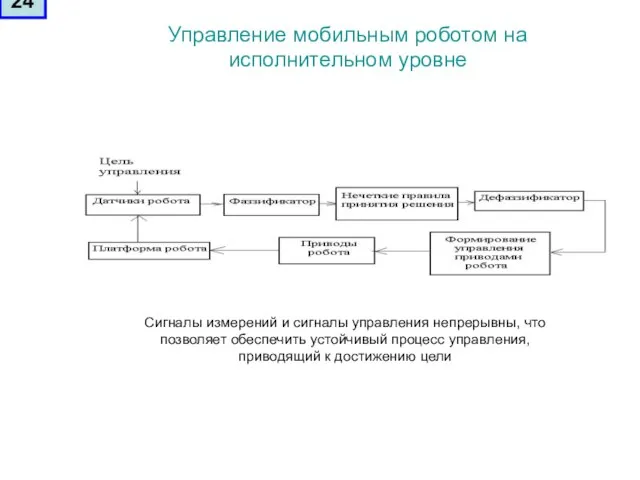
Слайд 24Управление мобильным роботом на исполнительном уровне
Сигналы измерений и сигналы управления непрерывны, что
Управление мобильным роботом на исполнительном уровне
Сигналы измерений и сигналы управления непрерывны, что
Слайд 25Если дистанция малая и цель впереди, то двигаться медленно, прямо
Если дистанция малая
Если дистанция малая и цель впереди, то двигаться медленно, прямо
Если дистанция малая
Слайд 26К вопросу устойчивости на исполнительном уровне
Система теряет устойчивость за счет неудачного выбора
К вопросу устойчивости на исполнительном уровне
Система теряет устойчивость за счет неудачного выбора
Слайд 27
Типовые (рефлекторные) движения мобильного робота на исполнительном уровне могут быть легко заданы
Типовые (рефлекторные) движения мобильного робота на исполнительном уровне могут быть легко заданы
Слайд 28 В случае манипуляционных операций диапазон выполняемых типовых операций существенно расширяется, что
В случае манипуляционных операций диапазон выполняемых типовых операций существенно расширяется, что
Слайд 29< имя операции >
< исходная ситуация >
< целевая
< исходная ситуация >
< целевая
Слайд 30Элементарные операции непосредственно выполняются роботом если выполнены предусловия. В противном случае формируется
Слайд 31
Механизм разрешения противоречий основан на сравнении наблюдаемой роботом ситуации и заданной
Механизм разрешения противоречий основан на сравнении наблюдаемой роботом ситуации и заданной
Слайд 3232
Последовательность элементарных операций, приводящих к достижению цели образует граф, позволяющий определить наиболее
32
Последовательность элементарных операций, приводящих к достижению цели образует граф, позволяющий определить наиболее
Слайд 33Граф-план сложной операции
33
Граф-план сложной операции
33
Слайд 34Проблемно-ориентированный язык управления
ЕЯ - высказывания построены на части естественного языка, ограниченного предметной
Проблемно-ориентированный язык управления
ЕЯ - высказывания построены на части естественного языка, ограниченного предметной
Слайд 35Структура команды оператора и её анализ в базе знаний ЭРИС
35
«Переместить объект А»
Модель
Структура команды оператора и её анализ в базе знаний ЭРИС
35
«Переместить объект А»
Модель
Слайд 36Синтаксический разбор команды
36
Синтаксический разбор команды
36
Слайд 37Взаимодействие оператора с роботом на уровне планирования операций
Человек-
оператор
Интерпретатор
команд
Робот
База рабочих операций
Проверка предусловий
База
Взаимодействие оператора с роботом на уровне планирования операций
Человек-
оператор
Интерпретатор
команд
Робот
База рабочих операций
Проверка предусловий
База
Слайд 38Оператор не всегда может формализовать свои знания об управлении роботом в виде
Оператор не всегда может формализовать свои знания об управлении роботом в виде
Слайд 39Задача обучения робота решается по принципу «обучение с учителем» с помощью гибридной
Задача обучения робота решается по принципу «обучение с учителем» с помощью гибридной
Слайд 40Робот «Богомол» (Институт физико-технических проблем, Москва)
Оператор управляет движением шести гусениц робота, имеющих
Робот «Богомол» (Институт физико-технических проблем, Москва)
Оператор управляет движением шести гусениц робота, имеющих
Слайд 41Адаптивная система нечеткого вывода позволяет автоматически формализовать правила выполнения операции человеком в
Адаптивная система нечеткого вывода позволяет автоматически формализовать правила выполнения операции человеком в
Слайд 4242
42
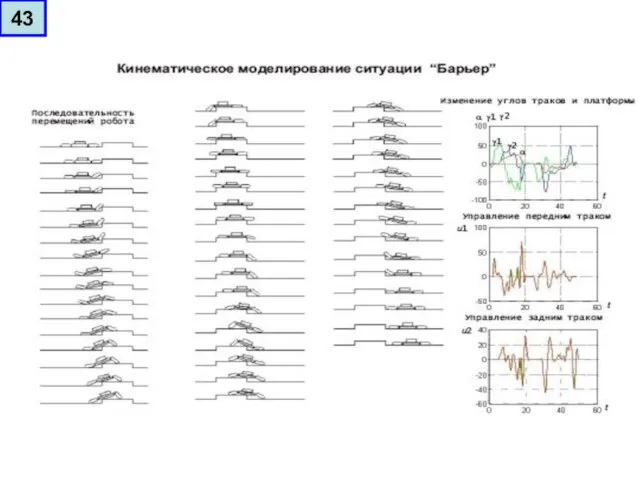
Слайд 4343
43
Слайд 44Распознавание ситуации с помощью кластеризации входных данных
44
Распознавание ситуации с помощью кластеризации входных данных
44
Слайд 4545
45
Слайд 46
Метод автономного адаптивного
управления
применяется в тех случаях, когда вообще отсутствует априорная
Метод автономного адаптивного управления применяется в тех случаях, когда вообще отсутствует априорная

Слайд 47Управляющая система
Подсистема ФРО
Память эмоциональных
оценок образов
Память эмоциональных
оценок состояния
Память распознанных
образов
Память выбранных
Управляющая система
Подсистема ФРО
Память эмоциональных
оценок образов
Память эмоциональных
оценок состояния
Память распознанных
образов
Память выбранных
Слайд 48Компьютерная модель самообучающегося робота
«визуальный» датчик 1
«визуальный» датчик 2
«визуальный» датчик 3
Тактильный датчик 1
Тактильный
Компьютерная модель самообучающегося робота
«визуальный» датчик 1
«визуальный» датчик 2
«визуальный» датчик 3
Тактильный датчик 1
Тактильный

Слайд 49Речевое управление роботом
49
Речевое управление роботом
49
Слайд 50Функциональная схема речевого диалога человека и робота
Перечень функциональных модулей:
распознавание речи (получение символьного
Функциональная схема речевого диалога человека и робота
Перечень функциональных модулей:
распознавание речи (получение символьного
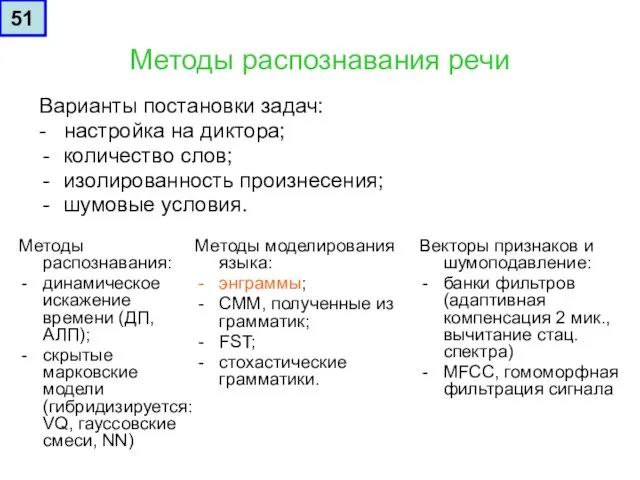
Слайд 51Методы распознавания речи
Варианты постановки задач:
- настройка на диктора;
количество слов;
изолированность произнесения;
шумовые условия.
Методы распознавания:
динамическое
Методы распознавания речи
Варианты постановки задач:
- настройка на диктора;
количество слов;
изолированность произнесения;
шумовые условия.
Методы распознавания:
динамическое
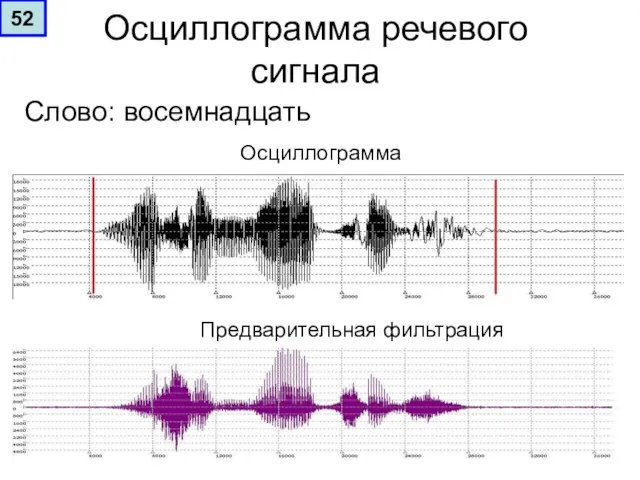
Слайд 52Осциллограмма речевого сигнала
Слово: восемнадцать
Осциллограмма
Предварительная фильтрация
52
Осциллограмма речевого сигнала
Слово: восемнадцать
Осциллограмма
Предварительная фильтрация
52
Слайд 5353
53
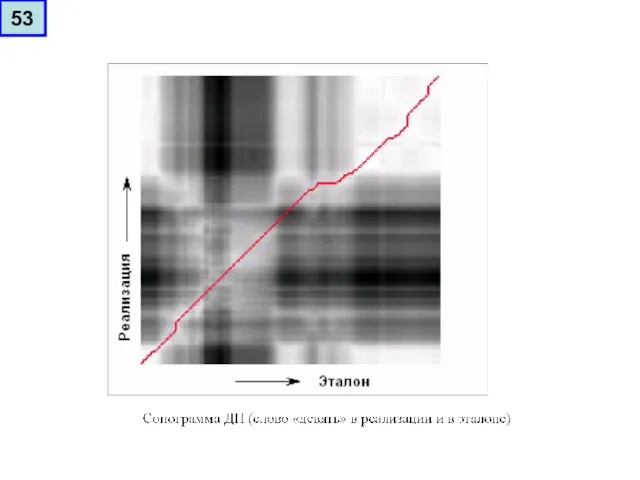
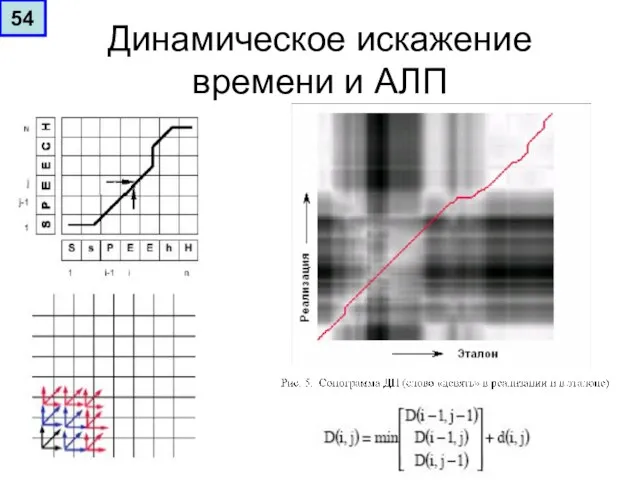
Слайд 54Динамическое искажение времени и АЛП
54
Динамическое искажение времени и АЛП
54
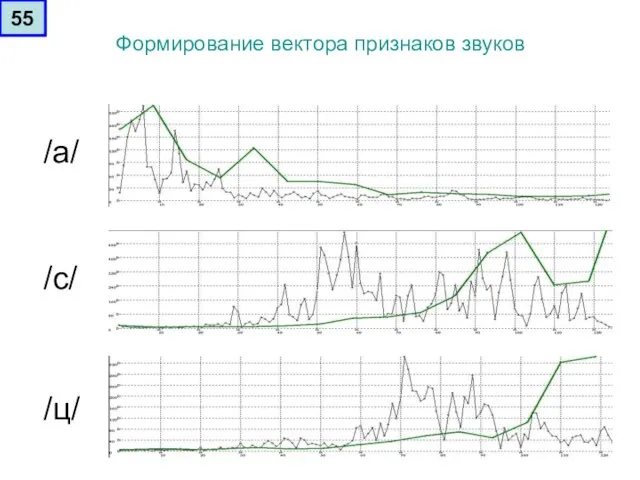
Слайд 55Формирование вектора признаков звуков
/а/
/c/
/ц/
55
Формирование вектора признаков звуков
/а/
/c/
/ц/
55
Слайд 56Кодирование
Код символа
S[i] есть 10100000 в двоичной системе или 160 в десятичной
56
Кодирование
Код символа
S[i] есть 10100000 в двоичной системе или 160 в десятичной
56
![Кодирование Код символа S[i] есть 10100000 в двоичной системе или 160 в десятичной 56](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/399997/slide-55.jpg)
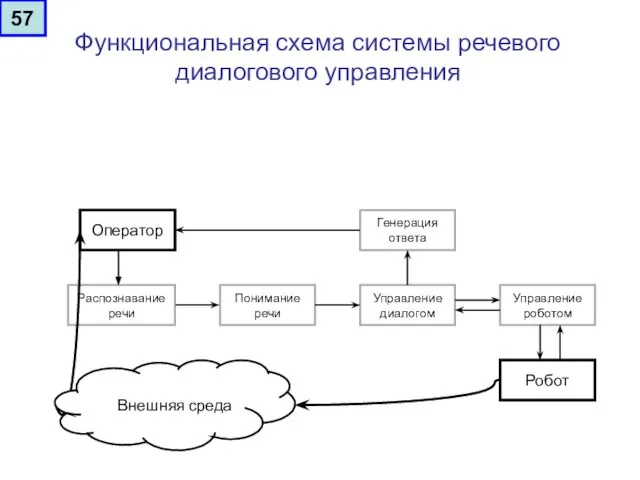
Слайд 57Функциональная схема системы речевого диалогового управления
Оператор
Робот
Распознавание речи
Понимание речи
Управление диалогом
Управление роботом
Генерация ответа
Внешняя среда
57
Функциональная схема системы речевого диалогового управления
Оператор
Робот
Распознавание речи
Понимание речи
Управление диалогом
Управление роботом
Генерация ответа
Внешняя среда
57
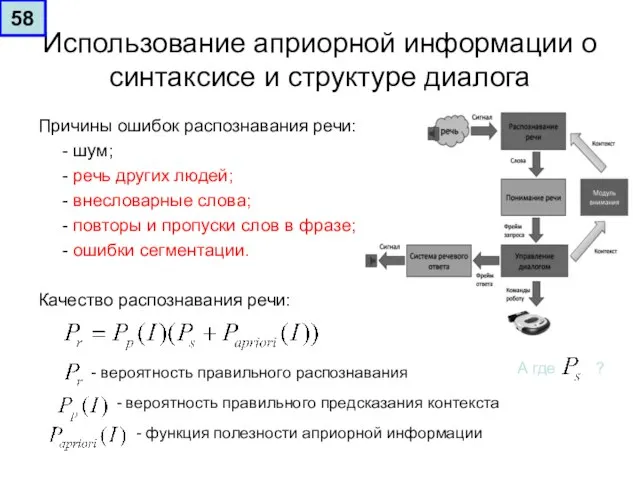
Слайд 58Использование априорной информации о синтаксисе и структуре диалога
Причины ошибок распознавания речи:
- шум;
-
Использование априорной информации о синтаксисе и структуре диалога
Причины ошибок распознавания речи:
- шум;
-
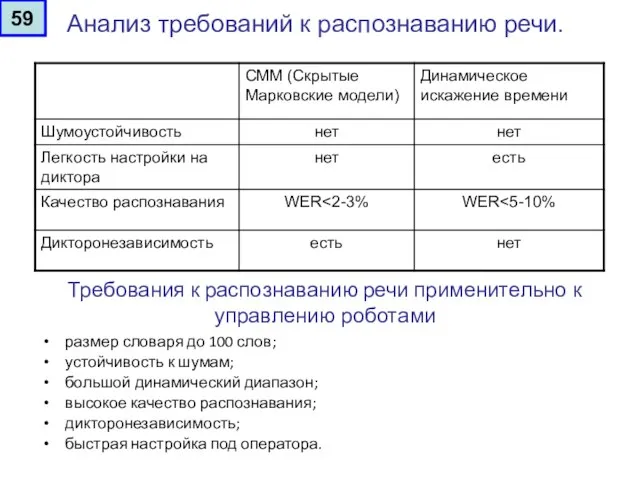
Слайд 59Анализ требований к распознаванию речи.
Требования к распознаванию речи применительно к управлению роботами
размер
Анализ требований к распознаванию речи.
Требования к распознаванию речи применительно к управлению роботами
размер
Слайд 60Разработка речевого диалога.
Модуль понимания речи
Оператор
Распознавание речи
Понимание речи
Выход:
Акустический сигнал
Гипотезы о словах
Запрос
Запрос –
Разработка речевого диалога.
Модуль понимания речи
Оператор
Распознавание речи
Понимание речи
Выход:
Акустический сигнал
Гипотезы о словах
Запрос
Запрос –
Слайд 61Сценарий диалога – совокупность состояний диалога (от начального до конечного) и переходов
Сценарий диалога – совокупность состояний диалога (от начального до конечного) и переходов
Слайд 62Задачи модуля управления диалогом:
- реакция на события диалога;
- интеграция событий от модуля
Задачи модуля управления диалогом:
- реакция на события диалога;
- интеграция событий от модуля
Слайд 63
Пример применения управляющей сети Петри для организации речевого диалога между оператором и
Пример применения управляющей сети Петри для организации речевого диалога между оператором и

Слайд 64«Понимание» роботом команд человека
Восприятие и правильная интерпретация речевого сигнала, составляющего
«Понимание» роботом команд человека
Восприятие и правильная интерпретация речевого сигнала, составляющего
Слайд 65ЗАДАЧИ НА БЛИЖАЙШУЮ ПЕРСПЕКТИВУ
От управления роботами к диалогу. Диалоговое управление «интеллектуальными»
ЗАДАЧИ НА БЛИЖАЙШУЮ ПЕРСПЕКТИВУ
От управления роботами к диалогу. Диалоговое управление «интеллектуальными»
 6. Участие граждан в политической жизни
6. Участие граждан в политической жизни Смешанные числа
Смешанные числа Разработка кольцевых маршрутов движения автотранспорта
Разработка кольцевых маршрутов движения автотранспорта Сетчатый орнамент. Maстер-класс преподавателя ИЗО
Сетчатый орнамент. Maстер-класс преподавателя ИЗО Тема урока: «Культура речи в профессиональной деятельности человека»
Тема урока: «Культура речи в профессиональной деятельности человека»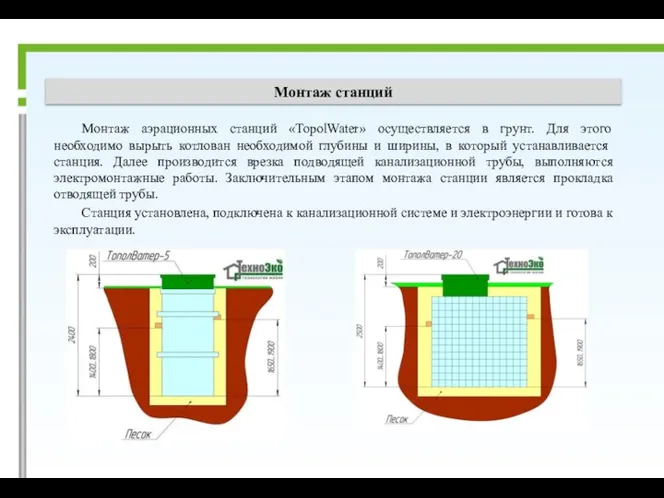 Монтаж станций
Монтаж станций Научно-производственная фирма Шар. Новые полимерные материалы
Научно-производственная фирма Шар. Новые полимерные материалы Презентация на тему Социалистическая индустриализация. Итоги первых пятилеток
Презентация на тему Социалистическая индустриализация. Итоги первых пятилеток  Особенностипродвиженияженских товаровв Интернете
Особенностипродвиженияженских товаровв Интернете А. И. Солженицын (1918-2008)
А. И. Солженицын (1918-2008) Народы, языки и религии
Народы, языки и религии Новогоднее мероприятие в стиле «Русские гуляния»
Новогоднее мероприятие в стиле «Русские гуляния» Совещание МО
Совещание МО Проект остановки транспорта. Окупаемость остановок при помощи рекламы
Проект остановки транспорта. Окупаемость остановок при помощи рекламы Россия и НАТО: реальность и перспективы взаимодействия
Россия и НАТО: реальность и перспективы взаимодействия Школа молодого педагога Специфика ведения школьной документации начального общего образования
Школа молодого педагога Специфика ведения школьной документации начального общего образования Задание по хозяйству
Задание по хозяйству Группа компаний DIGSEE
Группа компаний DIGSEE Боевые искусства Древней Руси
Боевые искусства Древней Руси Презентация на тему Влага в атмосфере
Презентация на тему Влага в атмосфере  macroeconomics
macroeconomics  Бизнес в Польше под ключ. Помощь для получения лизинга
Бизнес в Польше под ключ. Помощь для получения лизинга Масленица (1-8 класс)
Масленица (1-8 класс) Финикийские мореплаватели
Финикийские мореплаватели Бизнес-задача
Бизнес-задача Архитектура православного храма. Символика
Архитектура православного храма. Символика Системы мотивации и стимулирования персонала
Системы мотивации и стимулирования персонала Окислительно-восстановительные реакции
Окислительно-восстановительные реакции