- Обзор области пространства РЛС. Виды обзора

Содержание
- 2. Обзор пространства Перемещение ДН антенны РЛС, подчиненное определенному закону, называют радиолокационным обзором. В процессе данного перемещения
- 3. Обзор области пространства РЛС измеряет: азимут цели φ; угол места цели θ; наклонную дальность R; высоту
- 4. Пересечение лучей при обзоре Наложение сечений диаграммы направленности на смежных участках траектории при непрерывном перемещении Наложение
- 5. Период обзора пространства Период обзора РЛС – это отрезок времени между двумя последовательными прохождениями диаграммы направленности
- 6. Методы сканирования пространства Основные механизмы перемещения ДН антенны (сканирования): Механическое сканирование Достоинства: постоянные ширина ДН и
- 7. Перемещение луча при обзоре пространства Основные траектории перемещения луча ДН в пространстве: винтовой обзор; спиральный обзор;
- 8. Спиральный обзор Траектория движения ДН при спиральном обзоре: скорость переносного движения больше (слева) и меньше (справа)
- 9. Зигзагообразный обзор Траектория движения ДН при зигзагообразном обзоре: скорость переносного движения больше и меньше скорости относительного
- 10. Круговой обзора для РЛС с плоской антенной
- 11. Круговой обзор с плоской антенной Плоская ДН антенны Круговой обзор представляет собой вращение антенной системы вокруг
- 12. Применение кругового обзора Круговой обзор самолетной панорамной станцией Данный вид обзора используется: - в РЛС обзора
- 13. Параметры кругового обзора Скорость вращения антенной системы – количество оборотов антенны в единицу времени, измеряется об/с,
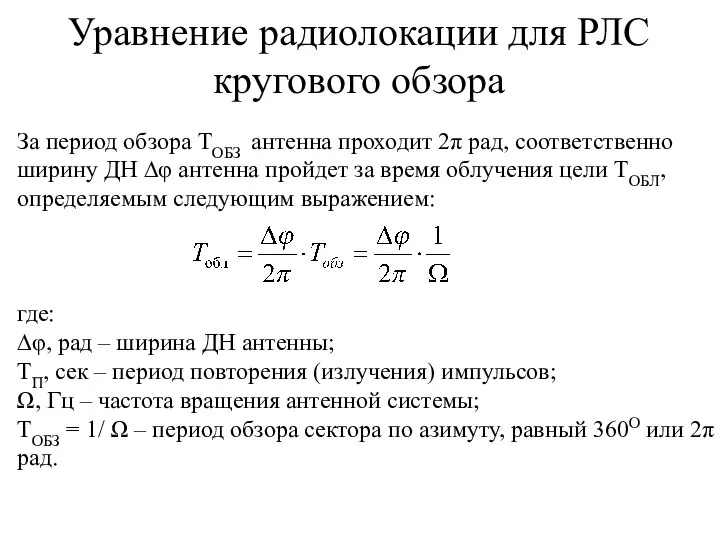
- 14. Уравнение радиолокации для РЛС кругового обзора За период обзора ТОБЗ антенна проходит 2π рад, соответственно ширину
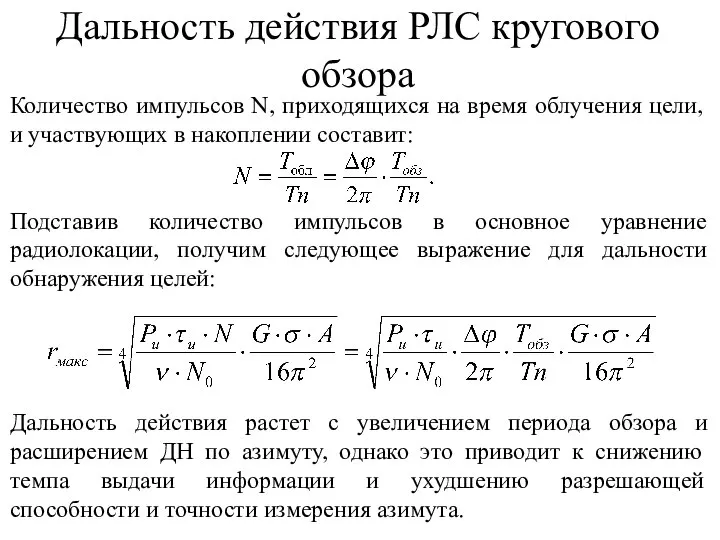
- 15. Дальность действия РЛС кругового обзора Количество импульсов N, приходящихся на время облучения цели, и участвующих в
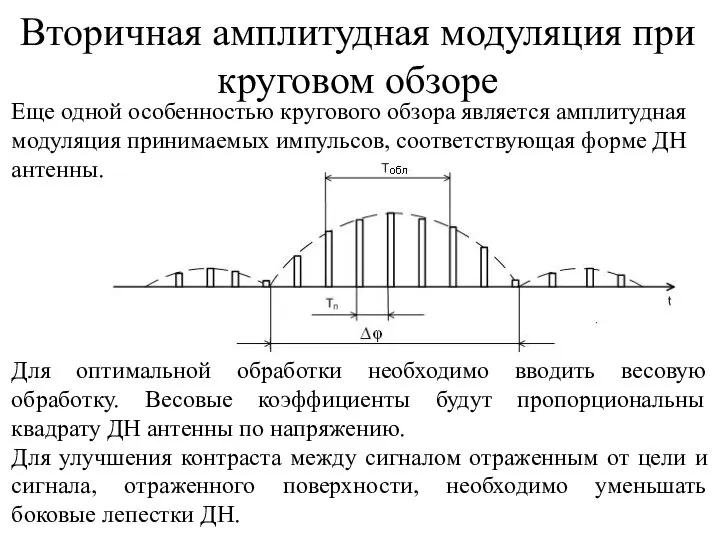
- 16. Еще одной особенностью кругового обзора является амплитудная модуляция принимаемых импульсов, соответствующая форме ДН антенны. Для оптимальной
- 17. Для отображения полученной радиолокационной информации используются индикаторы кругового обзора. Отображение кругового обзора Индикатор кругового обзора РЛС
- 18. Круговой обзора широкополосной РЛС Индикатор кругового обзора сверхкороткоимпульсной радиолокационной станции малой дальности
- 19. РЛС обзора заданной зоны контроля Пример работы РЛС обзора летного поля «Атлантика». Реальная картинка, полученная в
- 20. Секторный обзор антенной системой на базе ФАР И АФАР
- 21. Требования к сектору обзора Сектор обзора по азимуту и углу места для таких систем ограничивается возможностями
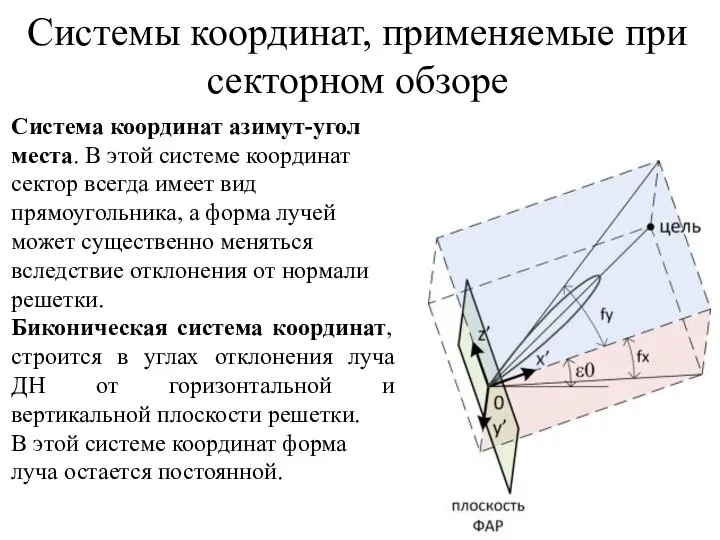
- 22. Системы координат, применяемые при секторном обзоре Система координат азимут-угол места. В этой системе координат сектор всегда
- 23. Методика расстановки лучей при секторном обзоре 1 Эквидистантная расстановка лучей в биконической системе координат без учета
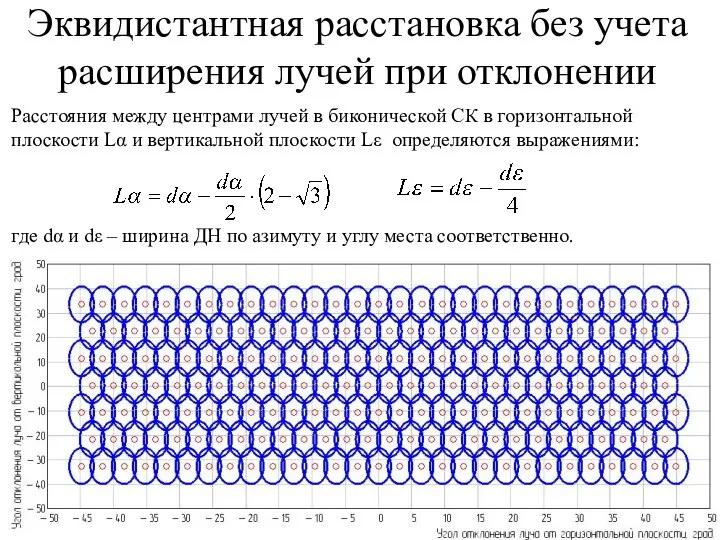
- 24. Эквидистантная расстановка без учета расширения лучей при отклонении Расстояния между центрами лучей в биконической СК в
- 25. Эквидистантная расстановка с учетом расширения лучей при отклонении Сα – координата центра луча в горизонтальной плоскости,
- 26. Переход от биконической к сферической системе координат Перевод любой точки плоскости биконической системы координат в систему
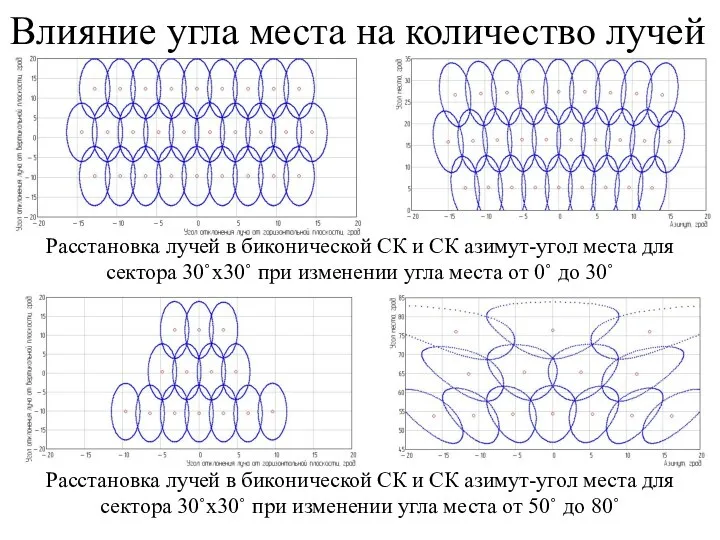
- 28. Расстановка лучей в биконической СК и СК азимут-угол места для сектора 30˚х30˚ при изменении угла места
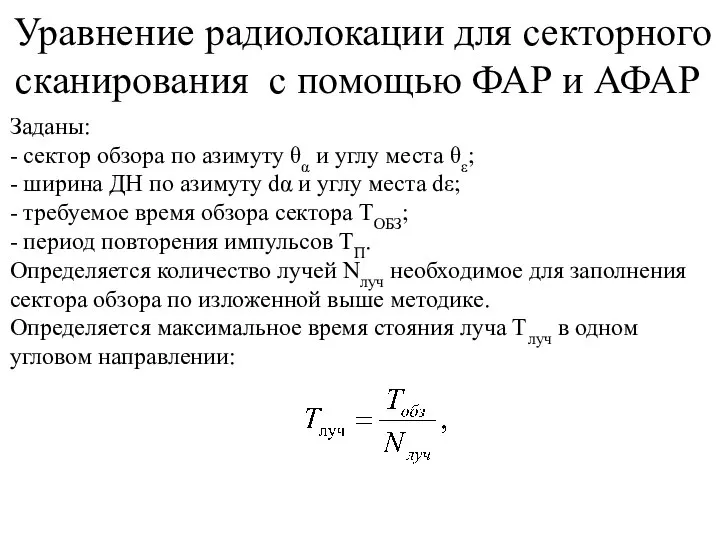
- 29. Уравнение радиолокации для секторного сканирования с помощью ФАР и АФАР Заданы: - сектор обзора по азимуту
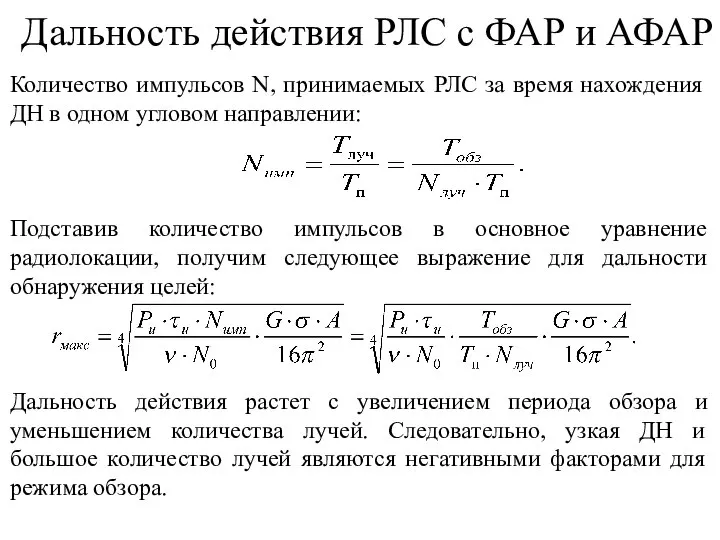
- 30. Количество импульсов N, принимаемых РЛС за время нахождения ДН в одном угловом направлении: Подставив количество импульсов
- 31. Секторный обзор в многопозиционных комплексах, состоящих из РЛС с остронаправленными антеннами
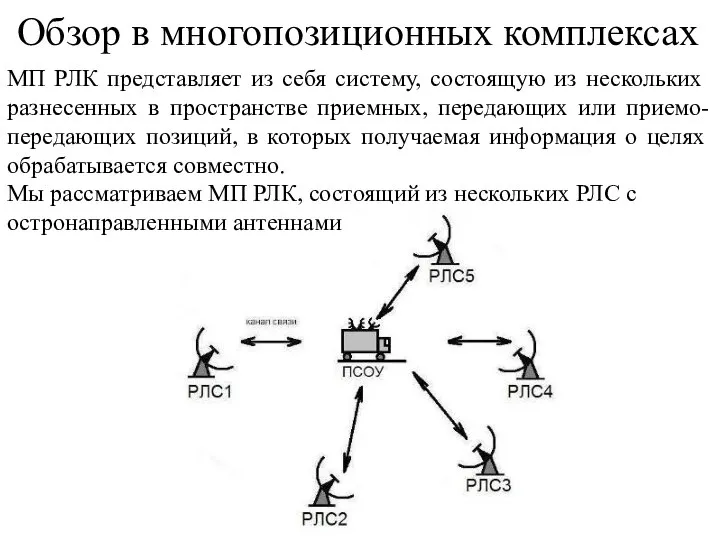
- 32. Обзор в многопозиционных комплексах МП РЛК представляет из себя систему, состоящую из нескольких разнесенных в пространстве
- 33. Уравнение радиолокации для МП РЛК Рассмотрим МП РЛК, состоящий из двух РЛС. Мощность, излучаемая каждой из
- 34. Мощность сигнала на цели для МП РЛК Каждая из РЛС излучает зондирующий сигнал и принимает составляющие
- 35. Принимаемая мощность в МП РЛК Плотность потока мощности, рассеиваемая целью, вследствие зондирования 1-ой РЛС: Плотность потока
- 36. Объединение мощности принимаемых сигналов в МП РЛК Мощность, принимаемая 2-ой РЛС, вследствие собственного зондирования: Мощность, принимаемая
- 37. МП РЛК состоящее из одинаковых РЛС Если РЛС одинаковые, то G1=G2=G и получим следующее выражение: Для
- 38. Улучшение отношения сигнал/шум для МП РЛК Подставляя полученные ранее выражения для мощности получим: Если Pш –
- 39. Обзор в МП РЛК со сканирующими АС При переходе к многопозиционной радиолокации возникают условия, при которых
- 40. Элемент объема в МП РЛК На форму энергетического элемента объема влияют: величина базы комплекса L; число
- 41. Координаты центра системы Xпоз i [м], Yпоз i [м], Zпоз i [м], - координаты позиции i-ой
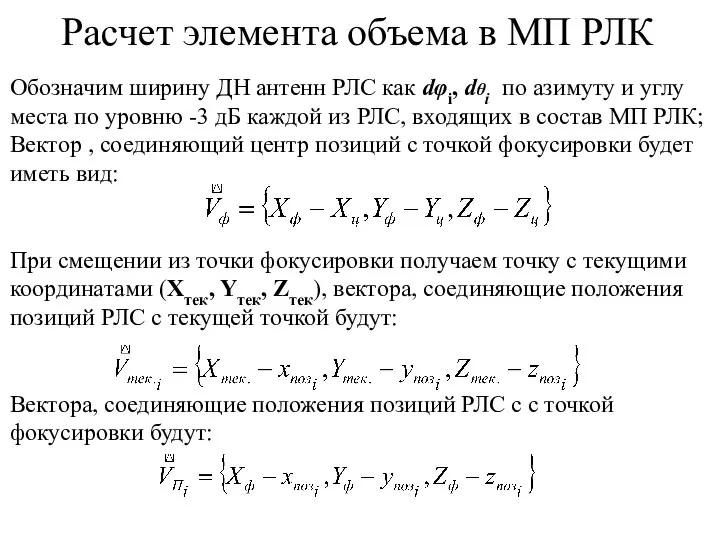
- 42. Обозначим ширину ДН антенн РЛС как dφi, dθi по азимуту и углу места по уровню -3
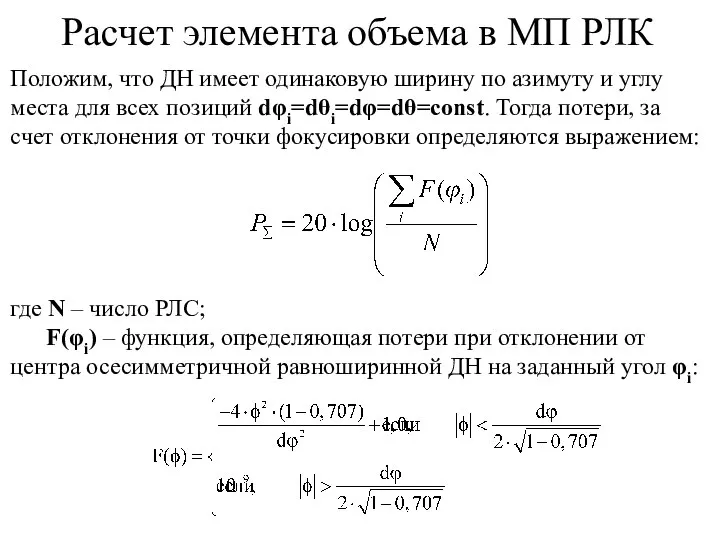
- 43. Положим, что ДН имеет одинаковую ширину по азимуту и углу места для всех позиций dφi=dθi=dφ=dθ=const. Тогда
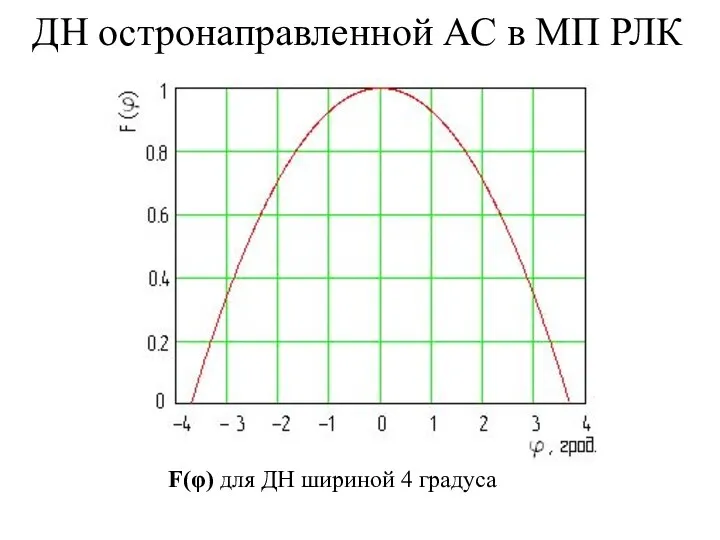
- 44. ДН остронаправленной АС в МП РЛК F(φ) для ДН шириной 4 градуса
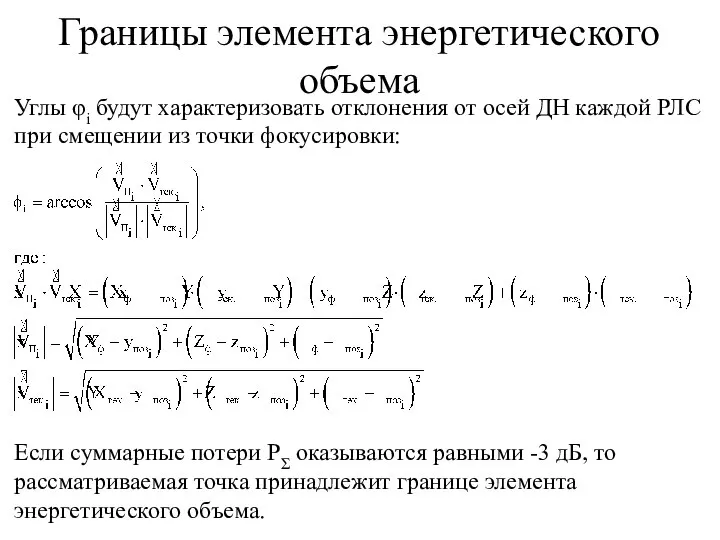
- 45. Границы элемента энергетического объема Углы φi будут характеризовать отклонения от осей ДН каждой РЛС при смещении
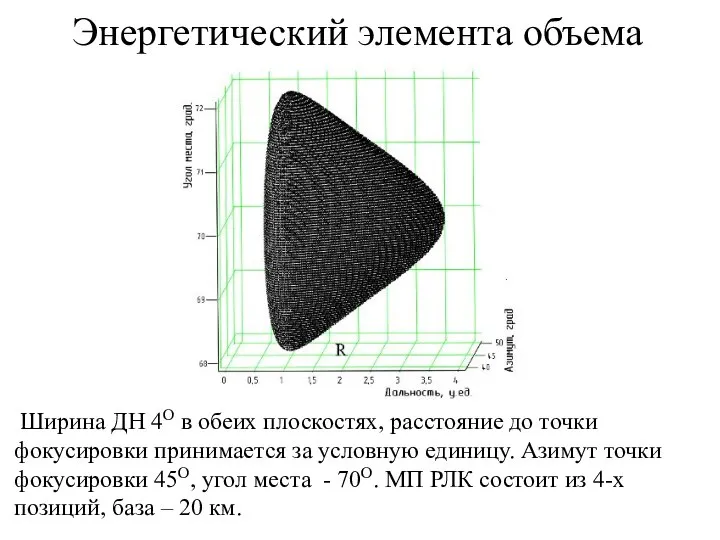
- 46. Энергетический элемента объема Ширина ДН 4О в обеих плоскостях, расстояние до точки фокусировки принимается за условную
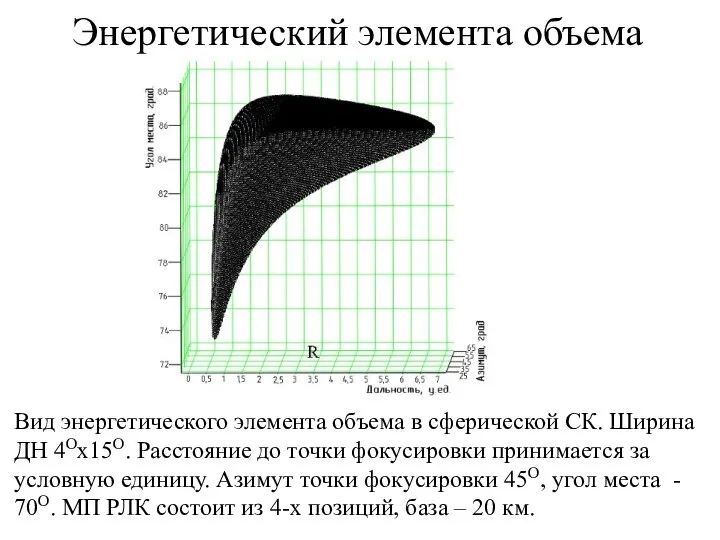
- 47. Вид энергетического элемента объема в сферической СК. Ширина ДН 4Ох15О. Расстояние до точки фокусировки принимается за
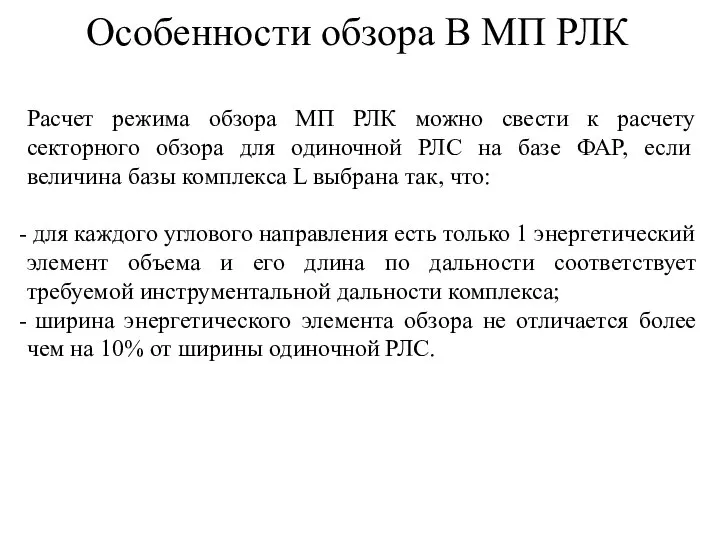
- 48. Особенности обзора В МП РЛК Расчет режима обзора МП РЛК можно свести к расчету секторного обзора
- 49. Обзор в РЛС с синтезированной апертурой антенны
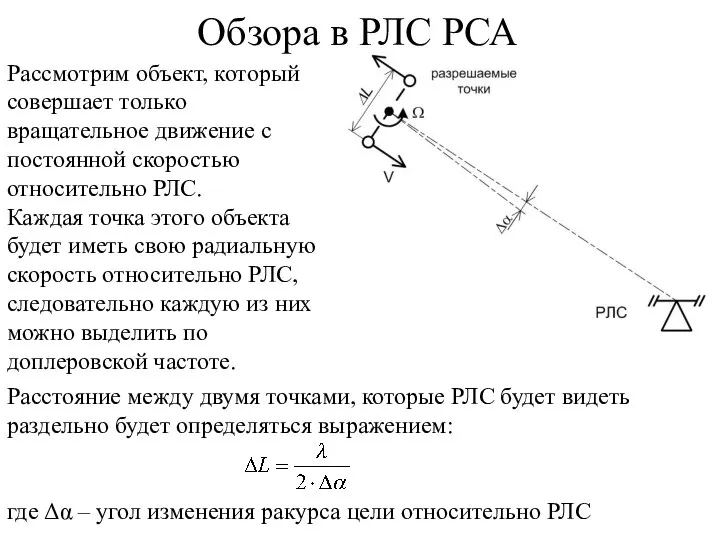
- 50. Расстояние между двумя точками, которые РЛС будет видеть раздельно будет определяться выражением: где Δα – угол
- 51. Радиолокационный синтез апертуры Получение радиолокационного изображения объекта или поверхности за счет изменения его ракурса относительно РЛС
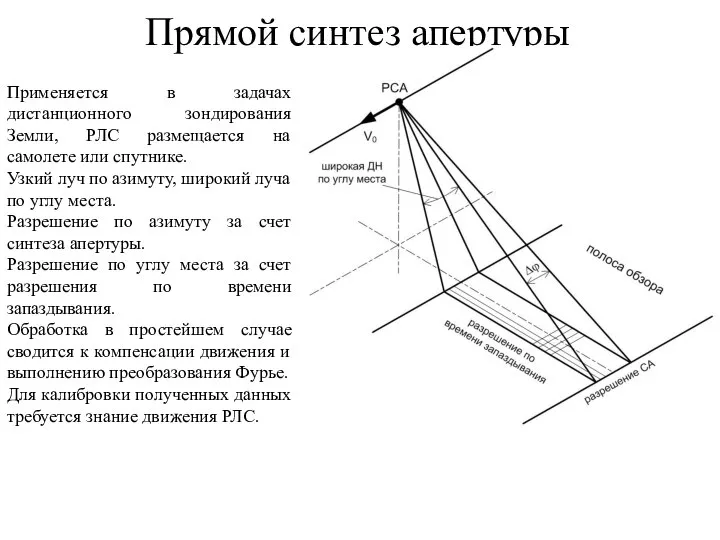
- 52. Прямой синтез апертуры Применяется в задачах дистанционного зондирования Земли, РЛС размещается на самолете или спутнике. Узкий
- 53. Параметры прямого синтеза апертуры Чувствительность РСА – это такая удельная ЭПР фона местности, который создает на
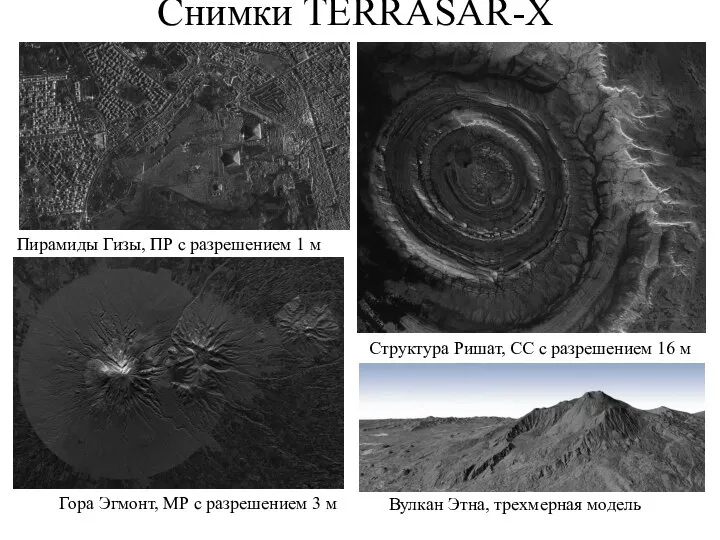
- 54. Вулкан Этна, трехмерная модель Пирамиды Гизы, ПР c разрешением 1 м Гора Эгмонт, МР c разрешением
- 56. Скачать презентацию
Слайд 2Обзор пространства
Перемещение ДН антенны РЛС, подчиненное определенному закону, называют радиолокационным обзором.
В процессе
Обзор пространства
Перемещение ДН антенны РЛС, подчиненное определенному закону, называют радиолокационным обзором.
В процессе
Слайд 3Обзор области пространства
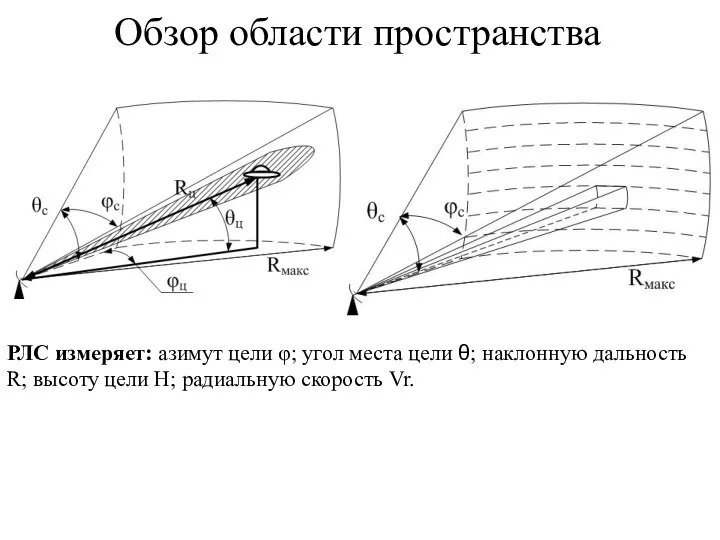
РЛС измеряет: азимут цели φ; угол места цели θ;
Обзор области пространства
РЛС измеряет: азимут цели φ; угол места цели θ;
Слайд 4Пересечение лучей при обзоре
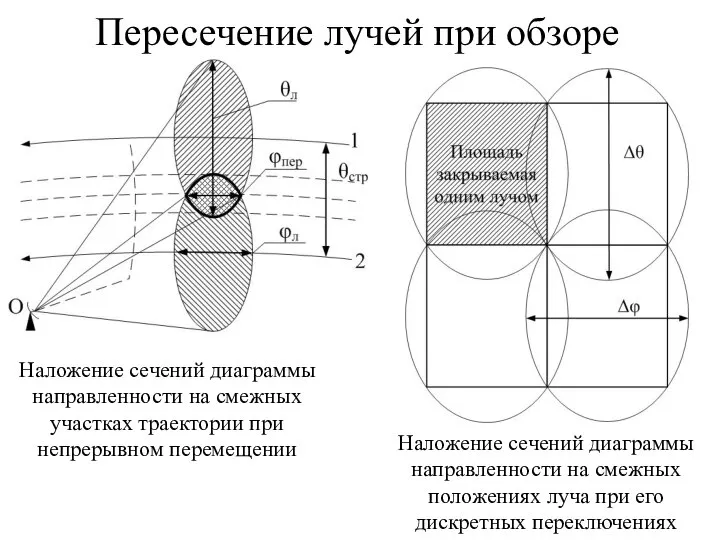
Наложение сечений диаграммы направленности на смежных участках траектории при
Пересечение лучей при обзоре
Наложение сечений диаграммы направленности на смежных участках траектории при
Слайд 5Период обзора пространства
Период обзора РЛС – это отрезок времени между двумя последовательными
Период обзора пространства
Период обзора РЛС – это отрезок времени между двумя последовательными
Слайд 6Методы сканирования пространства
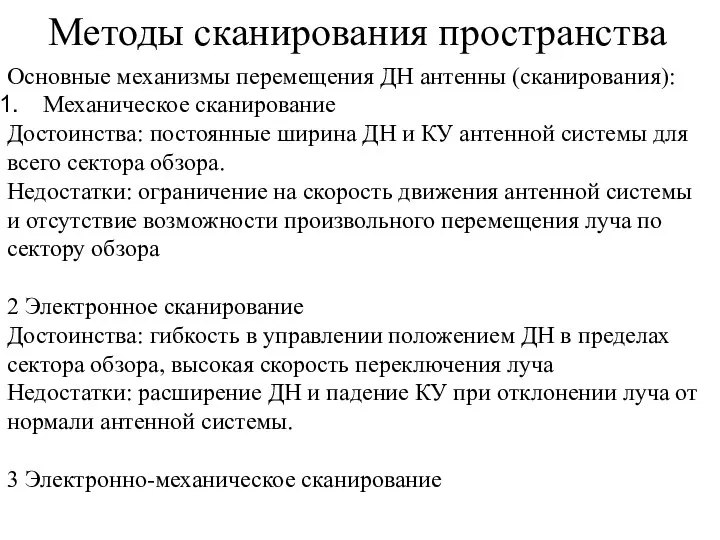
Основные механизмы перемещения ДН антенны (сканирования):
Механическое сканирование
Достоинства: постоянные ширина ДН
Методы сканирования пространства
Основные механизмы перемещения ДН антенны (сканирования):
Механическое сканирование
Достоинства: постоянные ширина ДН
Слайд 7Перемещение луча при обзоре пространства
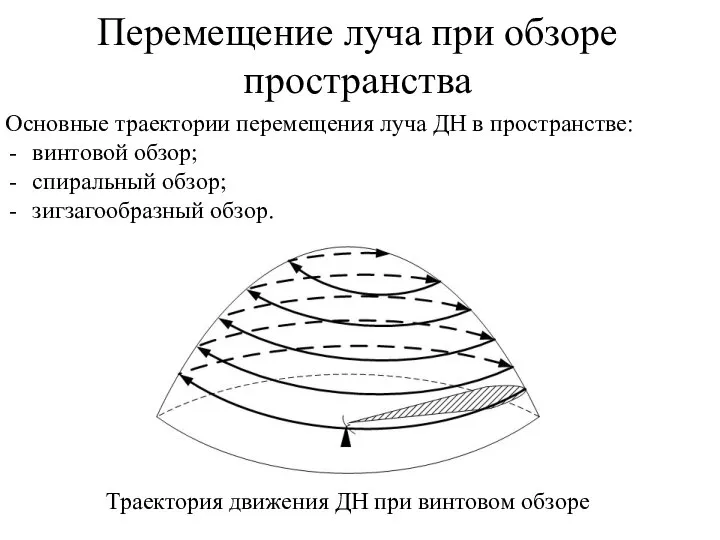
Основные траектории перемещения луча ДН в пространстве:
винтовой обзор;
спиральный
Перемещение луча при обзоре пространства
Основные траектории перемещения луча ДН в пространстве:
винтовой обзор;
спиральный
Слайд 8Спиральный обзор
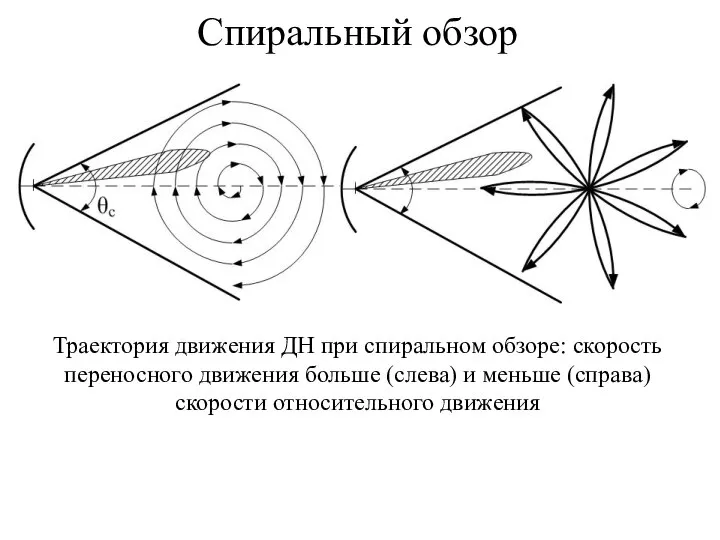
Траектория движения ДН при спиральном обзоре: скорость переносного движения больше (слева)
Спиральный обзор
Траектория движения ДН при спиральном обзоре: скорость переносного движения больше (слева)
Слайд 9Зигзагообразный обзор
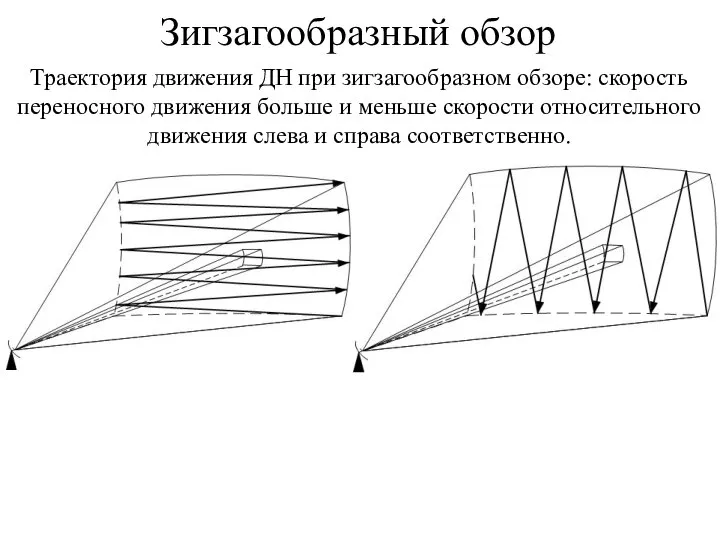
Траектория движения ДН при зигзагообразном обзоре: скорость переносного движения больше и
Зигзагообразный обзор
Траектория движения ДН при зигзагообразном обзоре: скорость переносного движения больше и
Слайд 10Круговой обзора для РЛС с
плоской антенной
Круговой обзора для РЛС с
плоской антенной
Слайд 11Круговой обзор с плоской антенной
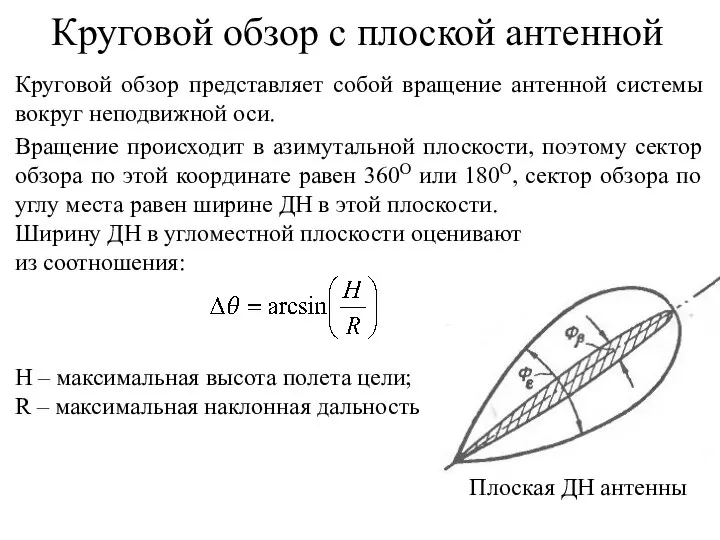
Плоская ДН антенны
Круговой обзор представляет собой вращение антенной
Круговой обзор с плоской антенной
Плоская ДН антенны
Круговой обзор представляет собой вращение антенной
Слайд 12Применение кругового обзора
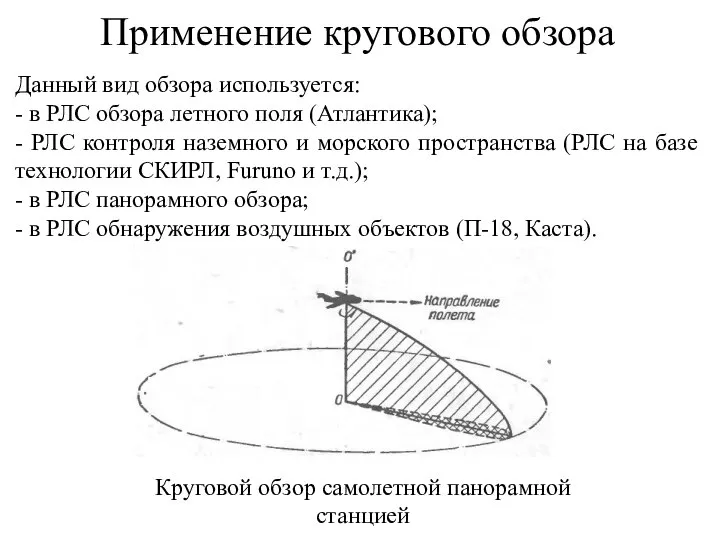
Круговой обзор самолетной панорамной станцией
Данный вид обзора используется:
- в РЛС
Применение кругового обзора
Круговой обзор самолетной панорамной станцией
Данный вид обзора используется:
- в РЛС
Слайд 13Параметры кругового обзора
Скорость вращения антенной системы – количество оборотов антенны в единицу
Параметры кругового обзора
Скорость вращения антенной системы – количество оборотов антенны в единицу
Слайд 14Уравнение радиолокации для РЛС
кругового обзора
За период обзора ТОБЗ антенна проходит 2π
Уравнение радиолокации для РЛС
кругового обзора
За период обзора ТОБЗ антенна проходит 2π
Слайд 15Дальность действия РЛС кругового обзора
Количество импульсов N, приходящихся на время облучения цели,
Дальность действия РЛС кругового обзора
Количество импульсов N, приходящихся на время облучения цели,
Слайд 16Еще одной особенностью кругового обзора является амплитудная модуляция принимаемых импульсов, соответствующая форме
Еще одной особенностью кругового обзора является амплитудная модуляция принимаемых импульсов, соответствующая форме
Слайд 17Для отображения полученной радиолокационной информации используются индикаторы кругового обзора.
Отображение кругового обзора
Индикатор кругового
Для отображения полученной радиолокационной информации используются индикаторы кругового обзора.
Отображение кругового обзора
Индикатор кругового

Слайд 18Круговой обзора широкополосной РЛС
Индикатор кругового обзора сверхкороткоимпульсной радиолокационной станции малой дальности
Круговой обзора широкополосной РЛС
Индикатор кругового обзора сверхкороткоимпульсной радиолокационной станции малой дальности

Слайд 19РЛС обзора заданной зоны контроля
Пример работы РЛС обзора летного поля «Атлантика». Реальная
РЛС обзора заданной зоны контроля
Пример работы РЛС обзора летного поля «Атлантика». Реальная

Слайд 20Секторный обзор антенной
системой на базе ФАР И АФАР
Секторный обзор антенной
системой на базе ФАР И АФАР
Слайд 21Требования к сектору обзора
Сектор обзора по азимуту и углу места для таких
Требования к сектору обзора
Сектор обзора по азимуту и углу места для таких
Слайд 22Системы координат, применяемые при секторном обзоре
Система координат азимут-угол места. В этой системе
Системы координат, применяемые при секторном обзоре
Система координат азимут-угол места. В этой системе
Слайд 23Методика расстановки лучей при секторном обзоре
1 Эквидистантная расстановка лучей в биконической системе
Методика расстановки лучей при секторном обзоре
1 Эквидистантная расстановка лучей в биконической системе
Слайд 24Эквидистантная расстановка без учета расширения лучей при отклонении
Расстояния между центрами лучей в
Эквидистантная расстановка без учета расширения лучей при отклонении
Расстояния между центрами лучей в
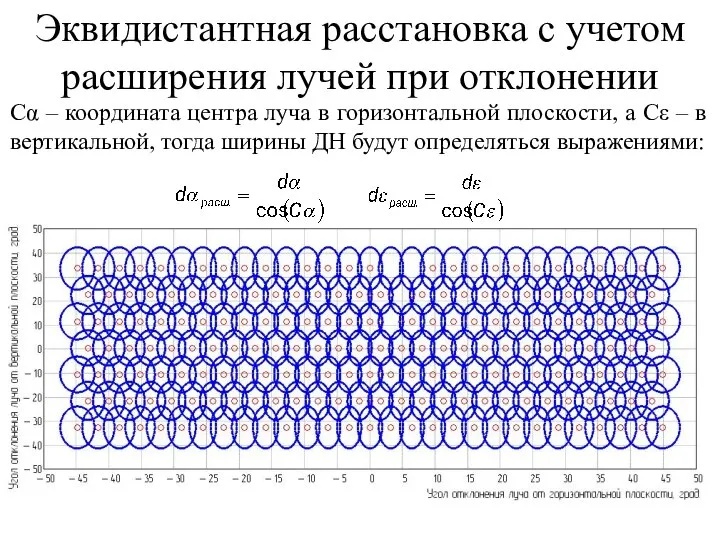
Слайд 25Эквидистантная расстановка с учетом
расширения лучей при отклонении
Сα – координата центра луча в
Эквидистантная расстановка с учетом
расширения лучей при отклонении
Сα – координата центра луча в
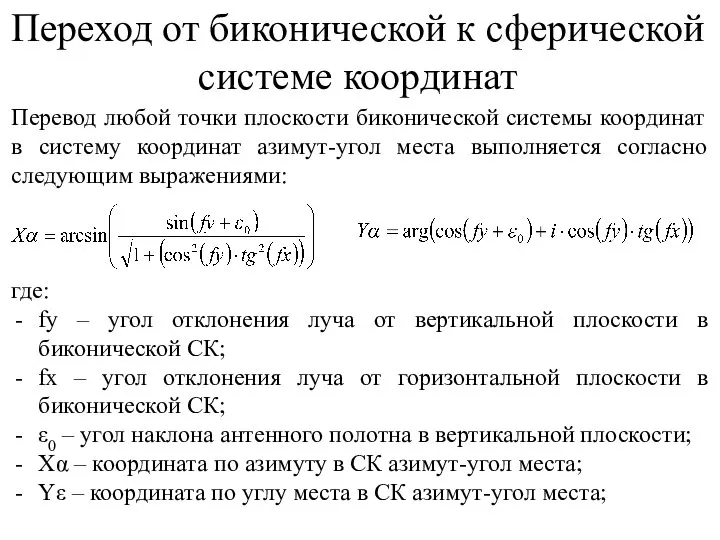
Слайд 26Переход от биконической к сферической системе координат
Перевод любой точки плоскости биконической системы
Переход от биконической к сферической системе координат
Перевод любой точки плоскости биконической системы
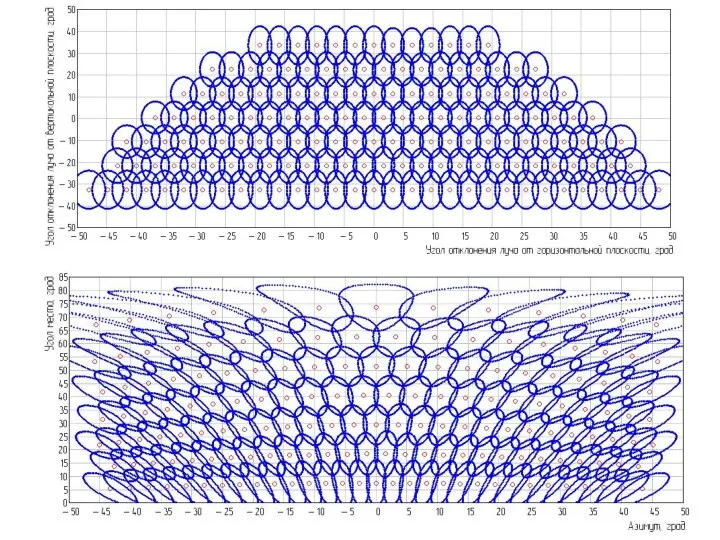
Слайд 28Расстановка лучей в биконической СК и СК азимут-угол места для сектора 30˚х30˚
Расстановка лучей в биконической СК и СК азимут-угол места для сектора 30˚х30˚
Слайд 29Уравнение радиолокации для секторного сканирования с помощью ФАР и АФАР
Заданы:
- сектор обзора
Уравнение радиолокации для секторного сканирования с помощью ФАР и АФАР
Заданы:
- сектор обзора
Слайд 30Количество импульсов N, принимаемых РЛС за время нахождения ДН в одном угловом
Количество импульсов N, принимаемых РЛС за время нахождения ДН в одном угловом
Слайд 31Секторный обзор в многопозиционных
комплексах, состоящих из РЛС с
остронаправленными антеннами
Секторный обзор в многопозиционных
комплексах, состоящих из РЛС с
остронаправленными антеннами
Слайд 32Обзор в многопозиционных комплексах
МП РЛК представляет из себя систему, состоящую из нескольких
Обзор в многопозиционных комплексах
МП РЛК представляет из себя систему, состоящую из нескольких
Слайд 33Уравнение радиолокации для МП РЛК
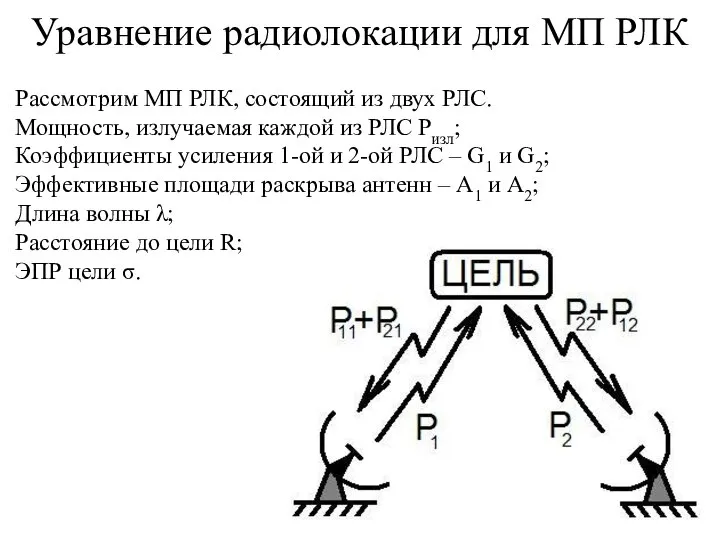
Рассмотрим МП РЛК, состоящий из двух РЛС.
Мощность, излучаемая
Уравнение радиолокации для МП РЛК
Рассмотрим МП РЛК, состоящий из двух РЛС.
Мощность, излучаемая
Слайд 34Мощность сигнала на цели для МП РЛК
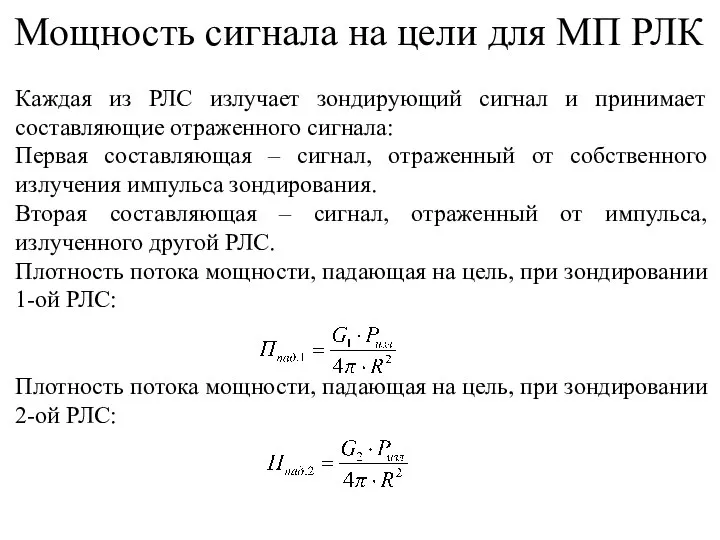
Каждая из РЛС излучает зондирующий сигнал
Мощность сигнала на цели для МП РЛК
Каждая из РЛС излучает зондирующий сигнал
Слайд 35Принимаемая мощность в МП РЛК
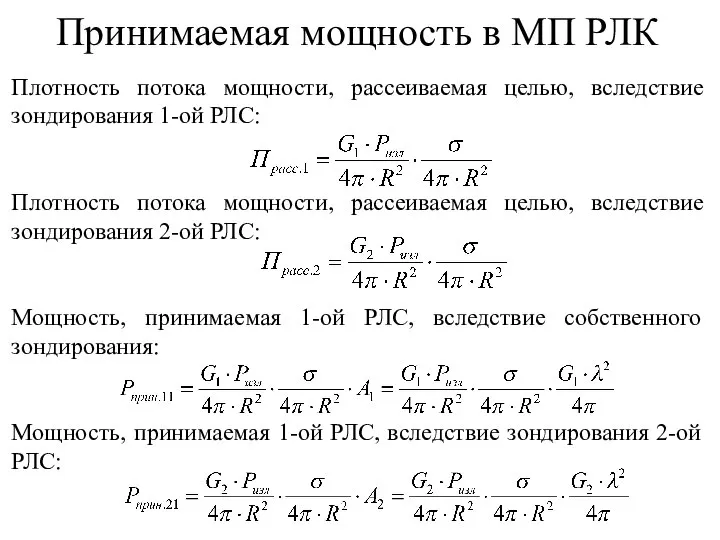
Плотность потока мощности, рассеиваемая целью, вследствие зондирования 1-ой
Принимаемая мощность в МП РЛК
Плотность потока мощности, рассеиваемая целью, вследствие зондирования 1-ой
Слайд 36Объединение мощности принимаемых сигналов в МП РЛК
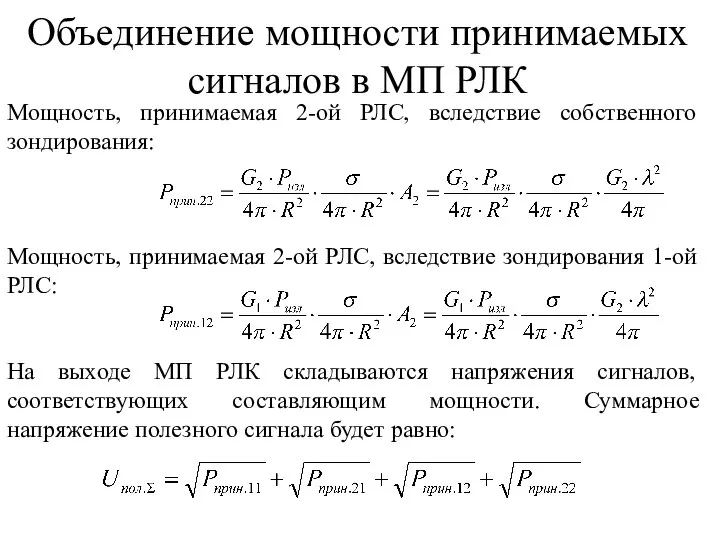
Мощность, принимаемая 2-ой РЛС, вследствие собственного
Объединение мощности принимаемых сигналов в МП РЛК
Мощность, принимаемая 2-ой РЛС, вследствие собственного
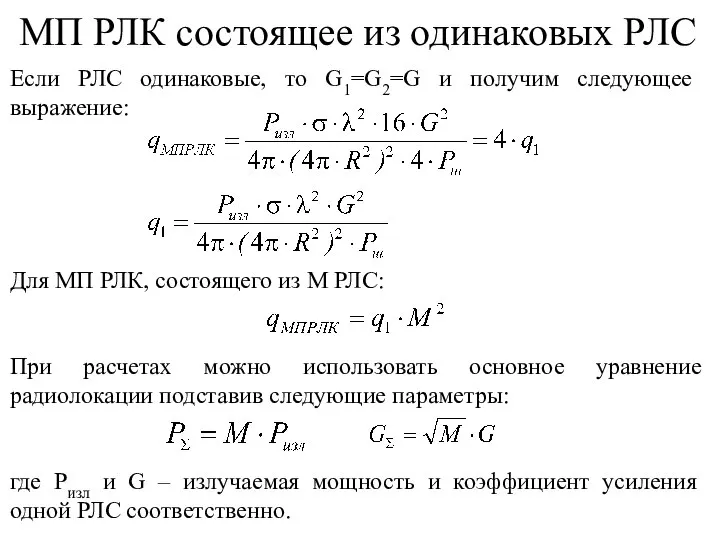
Слайд 37МП РЛК состоящее из одинаковых РЛС
Если РЛС одинаковые, то G1=G2=G и получим
МП РЛК состоящее из одинаковых РЛС
Если РЛС одинаковые, то G1=G2=G и получим
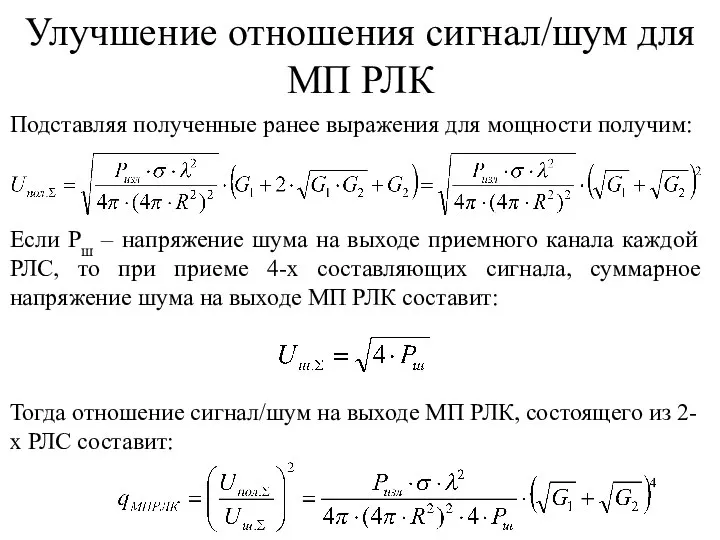
Слайд 38Улучшение отношения сигнал/шум для МП РЛК
Подставляя полученные ранее выражения для мощности получим:
Если
Улучшение отношения сигнал/шум для МП РЛК
Подставляя полученные ранее выражения для мощности получим:
Если
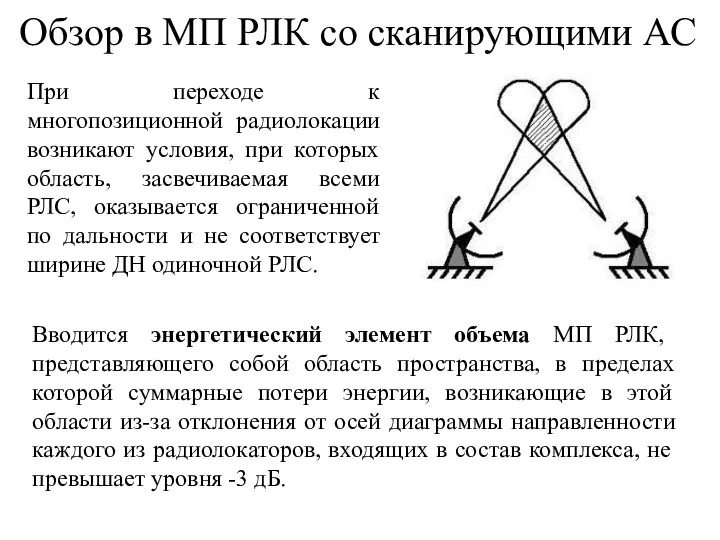
Слайд 39Обзор в МП РЛК со сканирующими АС
При переходе к многопозиционной радиолокации возникают
Обзор в МП РЛК со сканирующими АС
При переходе к многопозиционной радиолокации возникают
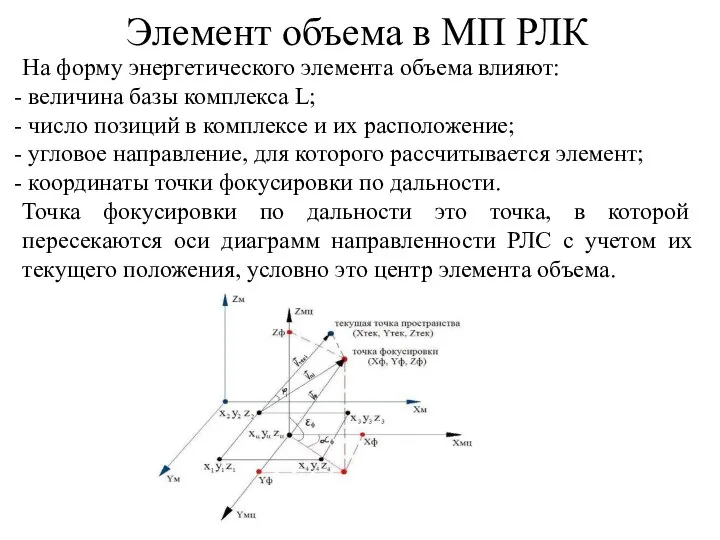
Слайд 40Элемент объема в МП РЛК
На форму энергетического элемента объема влияют:
величина базы
Элемент объема в МП РЛК
На форму энергетического элемента объема влияют:
величина базы
Слайд 41Координаты центра системы
Xпоз i [м], Yпоз i [м], Zпоз i [м], -
Координаты центра системы
Xпоз i [м], Yпоз i [м], Zпоз i [м], -
![Координаты центра системы Xпоз i [м], Yпоз i [м], Zпоз i [м],](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1152134/slide-40.jpg)
Слайд 42Обозначим ширину ДН антенн РЛС как dφi, dθi по азимуту и углу
Обозначим ширину ДН антенн РЛС как dφi, dθi по азимуту и углу
Слайд 43Положим, что ДН имеет одинаковую ширину по азимуту и углу места для
Положим, что ДН имеет одинаковую ширину по азимуту и углу места для
Слайд 44ДН остронаправленной АС в МП РЛК
F(φ) для ДН шириной 4 градуса
ДН остронаправленной АС в МП РЛК
F(φ) для ДН шириной 4 градуса
Слайд 45Границы элемента энергетического объема
Углы φi будут характеризовать отклонения от осей ДН каждой
Границы элемента энергетического объема
Углы φi будут характеризовать отклонения от осей ДН каждой
Слайд 46Энергетический элемента объема
Ширина ДН 4О в обеих плоскостях, расстояние до точки
Энергетический элемента объема
Ширина ДН 4О в обеих плоскостях, расстояние до точки
Слайд 47Вид энергетического элемента объема в сферической СК. Ширина ДН 4Ох15О. Расстояние до
Вид энергетического элемента объема в сферической СК. Ширина ДН 4Ох15О. Расстояние до
Слайд 48Особенности обзора В МП РЛК
Расчет режима обзора МП РЛК можно свести к
Особенности обзора В МП РЛК
Расчет режима обзора МП РЛК можно свести к
Слайд 49Обзор в РЛС с синтезированной
апертурой антенны
Обзор в РЛС с синтезированной
апертурой антенны
Слайд 50Расстояние между двумя точками, которые РЛС будет видеть раздельно будет определяться выражением:
где
Расстояние между двумя точками, которые РЛС будет видеть раздельно будет определяться выражением:
где
Слайд 51Радиолокационный синтез апертуры
Получение радиолокационного изображения объекта или поверхности за счет изменения его
Радиолокационный синтез апертуры
Получение радиолокационного изображения объекта или поверхности за счет изменения его
Слайд 52Прямой синтез апертуры
Применяется в задачах дистанционного зондирования Земли, РЛС размещается на самолете
Прямой синтез апертуры
Применяется в задачах дистанционного зондирования Земли, РЛС размещается на самолете
Слайд 53Параметры прямого синтеза апертуры
Чувствительность РСА – это такая удельная ЭПР фона местности,
Параметры прямого синтеза апертуры
Чувствительность РСА – это такая удельная ЭПР фона местности,
Слайд 54Вулкан Этна, трехмерная модель
Пирамиды Гизы, ПР c разрешением 1 м
Гора Эгмонт, МР
Вулкан Этна, трехмерная модель
Пирамиды Гизы, ПР c разрешением 1 м
Гора Эгмонт, МР
 Неформальное МедиаОбразование в Украине. MediaNext Яна Атискова, Украина
Неформальное МедиаОбразование в Украине. MediaNext Яна Атискова, Украина Лес и его обитатели
Лес и его обитатели Очищение и кондиционирование. Предложение для клиента
Очищение и кондиционирование. Предложение для клиента Почему детям бывает трудно учиться?
Почему детям бывает трудно учиться? Развитие науки XVI - XVIII вв
Развитие науки XVI - XVIII вв 1 2 Общеучебные умения: Учебно-организационные Учебно-интеллектуальные Учебно-информационные Учебно-коммуникативные.
1 2 Общеучебные умения: Учебно-организационные Учебно-интеллектуальные Учебно-информационные Учебно-коммуникативные. Japanese table manners
Japanese table manners «Резьба по дереву»
«Резьба по дереву» Проекты ПАО НОВАТЭК
Проекты ПАО НОВАТЭК The world of good people
The world of good people hats
hats Отчет Совета студентов и аспирантов ВолГУ о проделанной работе за 2009-2010 учебный год.
Отчет Совета студентов и аспирантов ВолГУ о проделанной работе за 2009-2010 учебный год. ОСС-2000
ОСС-2000 Презентация по геометрии по теме «Конус»
Презентация по геометрии по теме «Конус» ОБ ИТОГАХ РАБОТЫ ФКУ «УПРАВЛЕНИЕ ГОСЭКСПЕРТИЗЫ И ЖИЛИЩНОГО ОБЕСПЕЧЕНИЯ МЧС РОССИИ» В 2011 ГОДУ
ОБ ИТОГАХ РАБОТЫ ФКУ «УПРАВЛЕНИЕ ГОСЭКСПЕРТИЗЫ И ЖИЛИЩНОГО ОБЕСПЕЧЕНИЯ МЧС РОССИИ» В 2011 ГОДУ День Конституции
День Конституции ГК ТехноПрогресс
ГК ТехноПрогресс Программа развития института частных судебных исполнителей на 2018 – 2025 годы
Программа развития института частных судебных исполнителей на 2018 – 2025 годы Рефлексия цикла ОУП 2020-2021. Воспроизводство и проектирование цикла ОУП 2021-2022
Рефлексия цикла ОУП 2020-2021. Воспроизводство и проектирование цикла ОУП 2021-2022 Эволюция современных организаций
Эволюция современных организаций Классификация рекламы по рекламодателям
Классификация рекламы по рекламодателям Решение линейных уравнений с параметрами
Решение линейных уравнений с параметрами Личность. Лекция 4
Личность. Лекция 4 Аппаратное обеспечение ПЭВМ
Аппаратное обеспечение ПЭВМ Формирование системы технического регулирования Таможенного союза
Формирование системы технического регулирования Таможенного союза Peinture sur le corps
Peinture sur le corps Тоннель
Тоннель "РИФМЫ"
"РИФМЫ"