- Сегментация изображений

Содержание
- 2. На прошлой лекции… На прошлой лекции научились работать со структурами «с нулевой площадью» на изображении (с
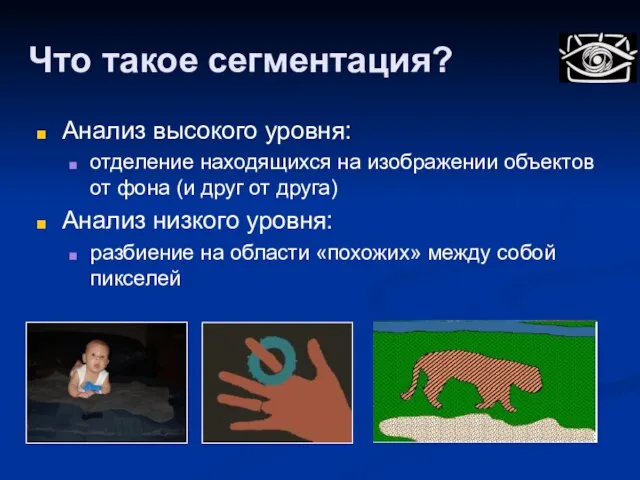
- 3. Что такое сегментация? Анализ высокого уровня: отделение находящихся на изображении объектов от фона (и друг от
- 4. Автоматика и интерактивность Подразделяем Автоматическая Сегментация производимая без взаимодействия с пользователем Картинка на входе, регионы на
- 5. Применение сегментации Фото(видео)монтаж, композиция
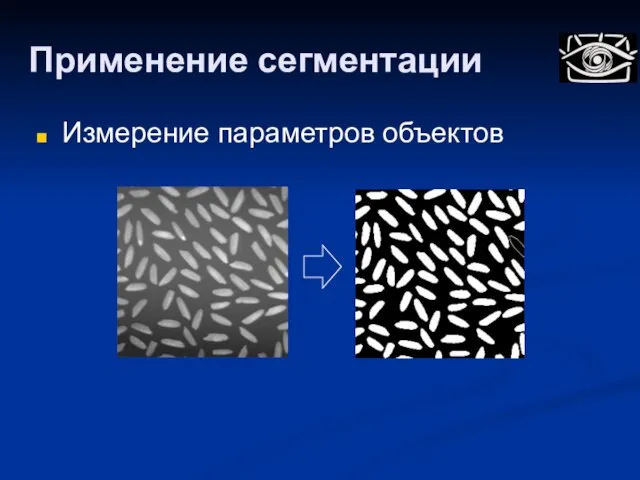
- 6. Применение сегментации Измерение параметров объектов
- 7. Применение сегментации Предобработка перед высокоуровневым анализом
- 8. Определение сегментации 1 «Жесткая» сегментация Разбиение изображения на неперекрывающиеся области, покрывающие все изображение и однородные по
- 9. Рассмотрим семейства методов: Основанные на поиске краев Основанные на формировании однородных областей Метод водораздела / tobogganing
- 10. Автоматическая сегментация Как можно сформировать однородные области? Отталкиваясь от неоднородности на границах Пример – ищем резкие
- 11. Однородность Варианты однородности: По яркости По цвету По близости на изображении По текстуре По глубине (Если
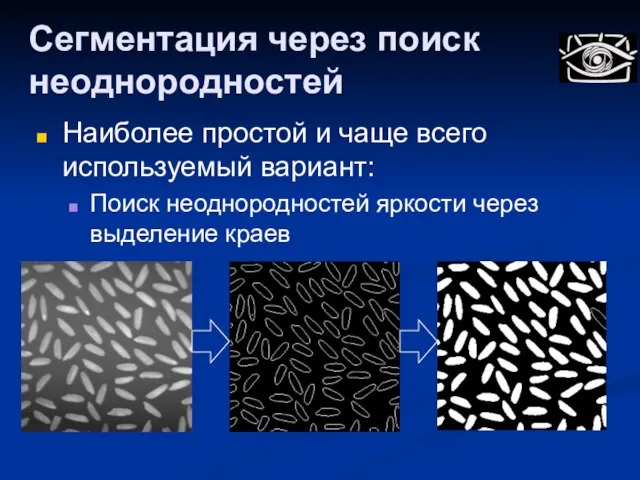
- 12. Сегментация через поиск неоднородностей Наиболее простой и чаще всего используемый вариант: Поиск неоднородностей яркости через выделение
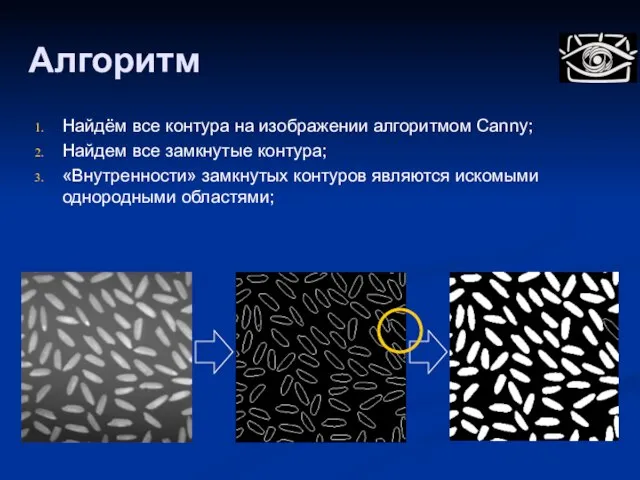
- 13. Алгоритм Найдём все контура на изображении алгоритмом Canny; Найдем все замкнутые контура; «Внутренности» замкнутых контуров являются
- 14. Сегментация через поиск однородных областей План Сегментация без учета пространственных связей Пороговая фильтрация Кластеризация по цвету
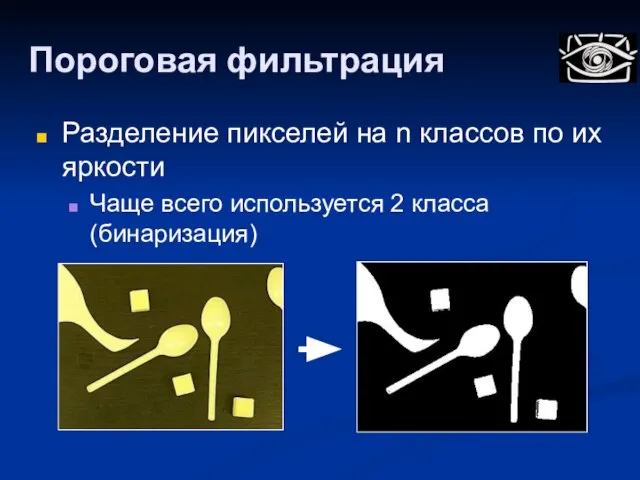
- 15. Пороговая фильтрация Разделение пикселей на n классов по их яркости Чаще всего используется 2 класса (бинаризация)
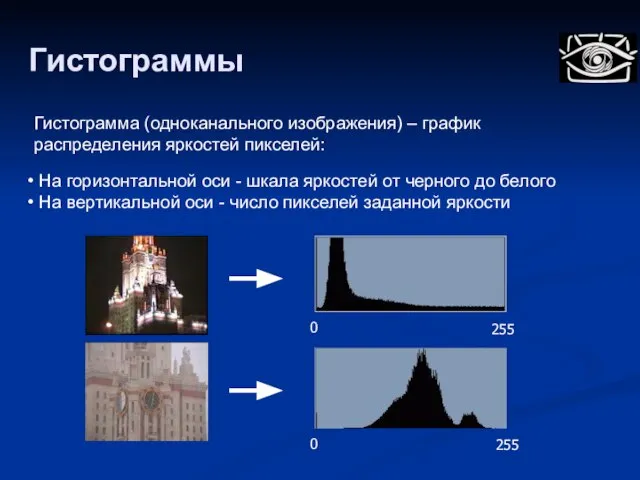
- 16. Гистограммы Гистограмма (одноканального изображения) – график распределения яркостей пикселей: На горизонтальной оси - шкала яркостей от
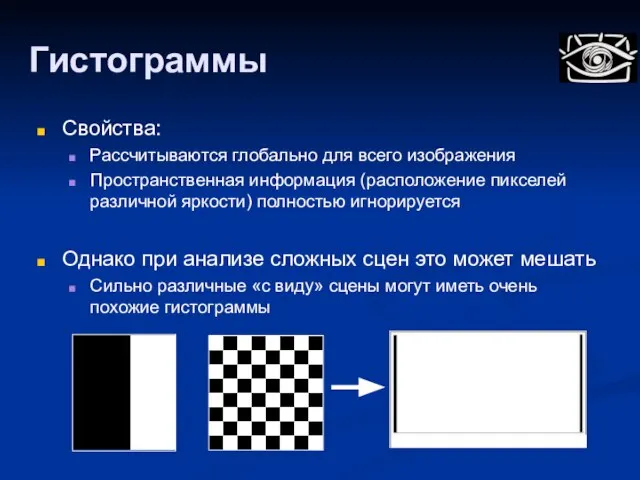
- 17. Гистограммы Свойства: Рассчитываются глобально для всего изображения Пространственная информация (расположение пикселей различной яркости) полностью игнорируется Это
- 18. Гистограммы Свойства: Рассчитываются глобально для всего изображения Пространственная информация (расположение пикселей различной яркости) полностью игнорируется Это
- 19. Гистограммы Свойства: Рассчитываются глобально для всего изображения Пространственная информация (расположение пикселей различной яркости) полностью игнорируется Однако
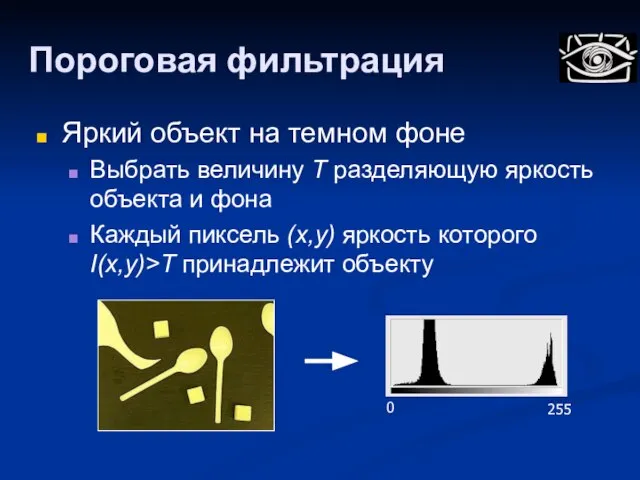
- 20. Пороговая фильтрация Яркий объект на темном фоне Выбрать величину T разделяющую яркость объекта и фона Каждый
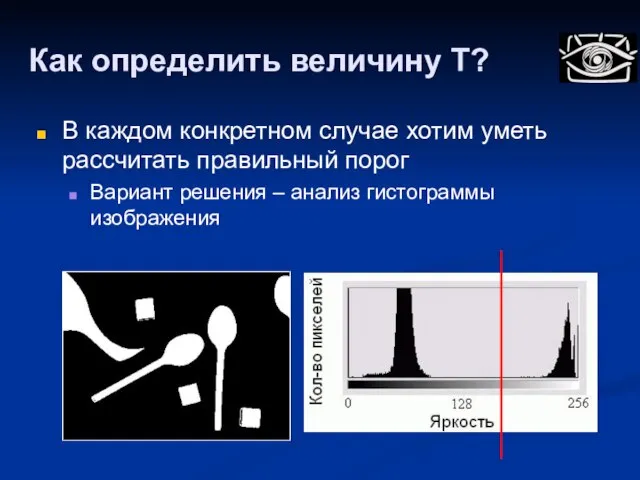
- 21. Как определить величину T? В каждом конкретном случае хотим уметь рассчитать правильный порог Вариант решения –
- 22. Автоопределение величины T Можно использовать следующее: 1. Предположение о яркости объектов 2. Размеры объектов 3. Площадь
- 23. Автоопределение величины T Метод P-tile: Если знаем (предполагаем) что объект занимает P% площади T устанавливаем так,
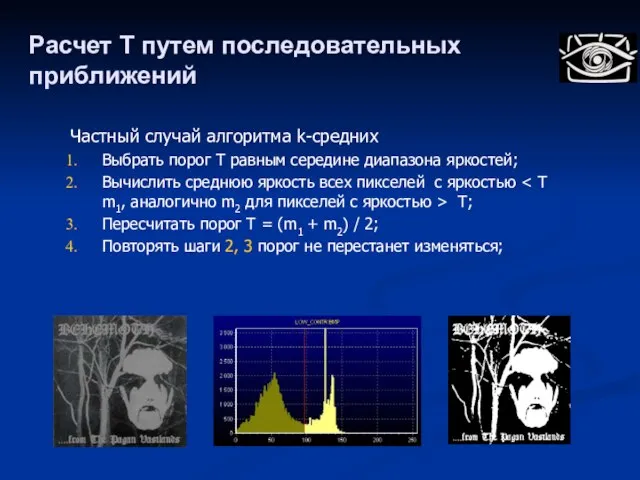
- 24. Расчет T путем последовательных приближений Частный случай алгоритма k-средних Выбрать порог T равным середине диапазона яркостей;
- 25. Поиск пиков в гистограмме Найти соседние локальные максимумы в гистограмме gi Рассчитать меру «пиковости» для gi
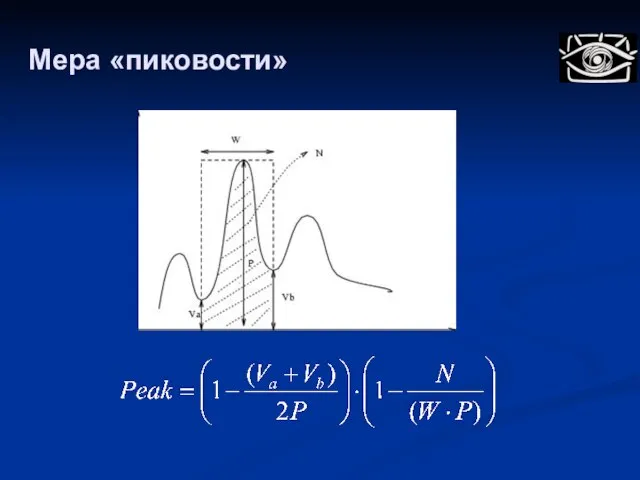
- 26. Мера «пиковости»
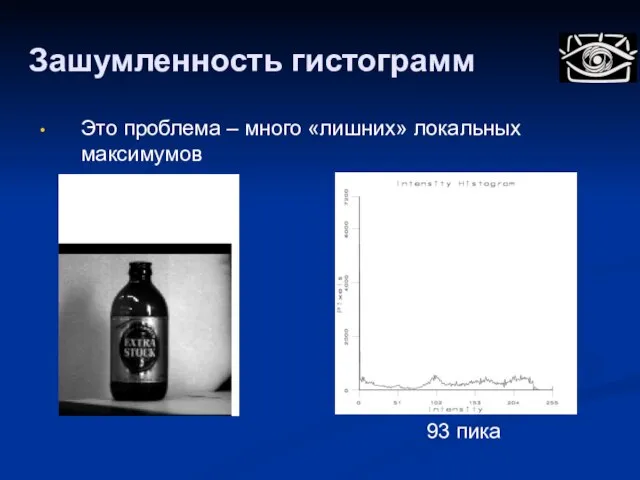
- 27. Зашумленность гистограмм 93 пика Это проблема – много «лишних» локальных максимумов
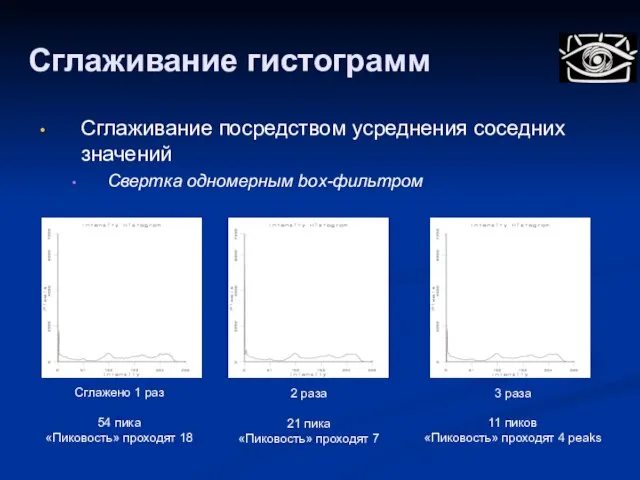
- 28. Сглаживание гистограмм Сглажено 1 раз 54 пика «Пиковость» проходят 18 2 раза 21 пика «Пиковость» проходят
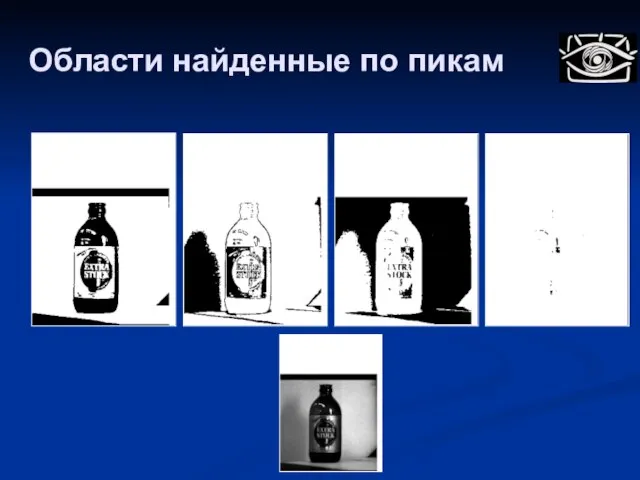
- 29. Области найденные по пикам
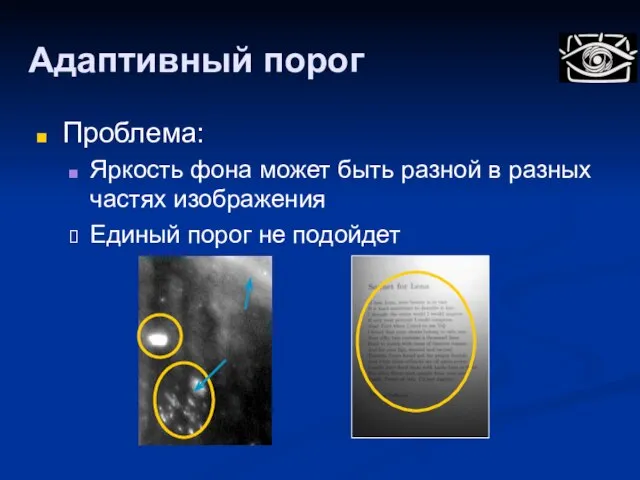
- 30. Адаптивный порог Проблема: Яркость фона может быть разной в разных частях изображения Единый порог не подойдет
- 31. Адаптивный порог Для каждого пикселя изображения I(x, y): В окрестности пикселя радиуса r высчитывается индивидуальная для
- 32. Адаптивный порог r=7, T=0 r=7, T=7 r=75, T=10 Исходное
- 33. Адаптивный порог Другая формулировка Приближение фона усреднением Вычитание фона - I(x, y) – C(x,y) > T
- 34. Адаптивный порог Хорошо работает Когда размер искомого объекта заметно меньше размера оцениваемой окрестности Хуже работает, Когда
- 35. Кластеризация k-средних Способ определения нескольких порогов одновременно Нужно заранее знать k - количество диапазонов яркостей В
- 36. Алгоритм k-средних Случайным образом выбрать k средних mj j=1,…,k; Для каждого vi i=1,…,p подсчитать расстояние до
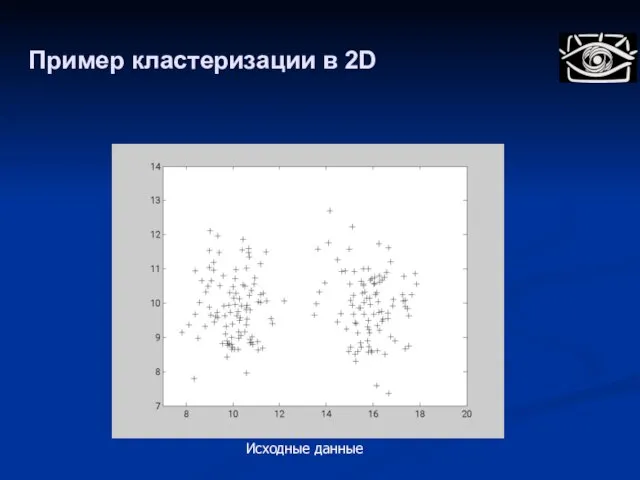
- 37. Пример кластеризации в 2D Исходные данные
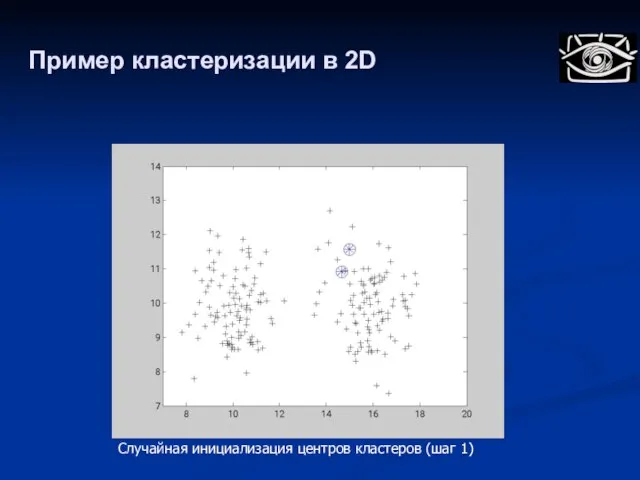
- 38. Пример кластеризации в 2D Случайная инициализация центров кластеров (шаг 1)
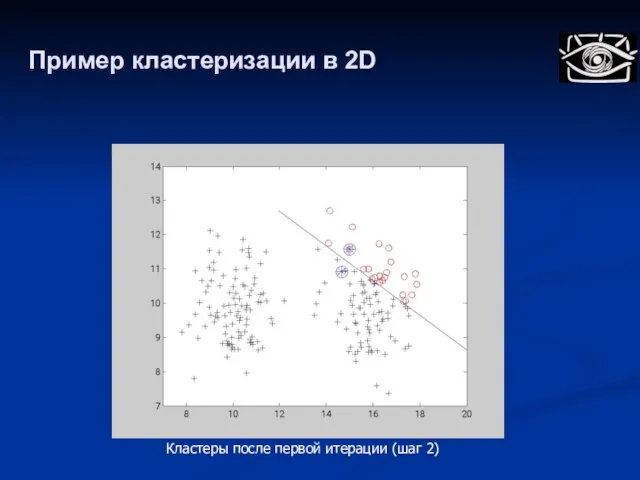
- 39. Пример кластеризации в 2D Кластеры после первой итерации (шаг 2)
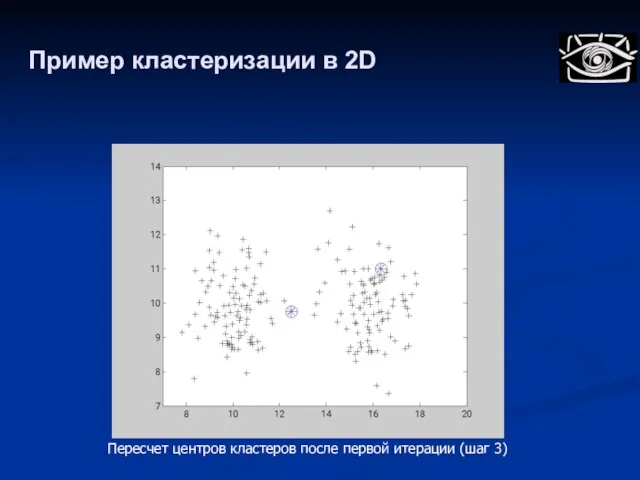
- 40. Пример кластеризации в 2D Пересчет центров кластеров после первой итерации (шаг 3)
- 41. Пример кластеризации в 2D Кластеры после второй итерации (шаг 2)
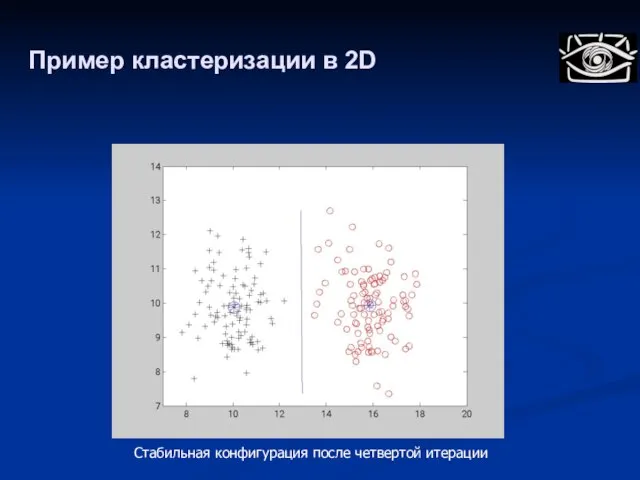
- 42. Пример кластеризации в 2D Стабильная конфигурация после четвертой итерации
- 43. k-средних для сегментации Если изображение одноканальное vi = I(x, y) – работаем в одномерном пространстве Получается
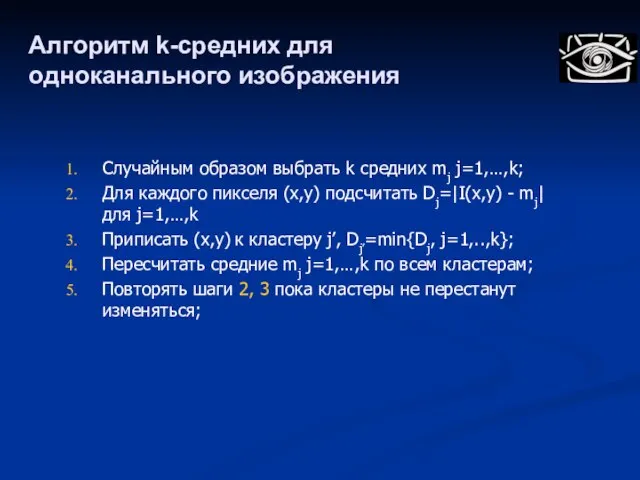
- 44. Алгоритм k-средних для одноканального изображения Случайным образом выбрать k средних mj j=1,…,k; Для каждого пикселя (x,y)
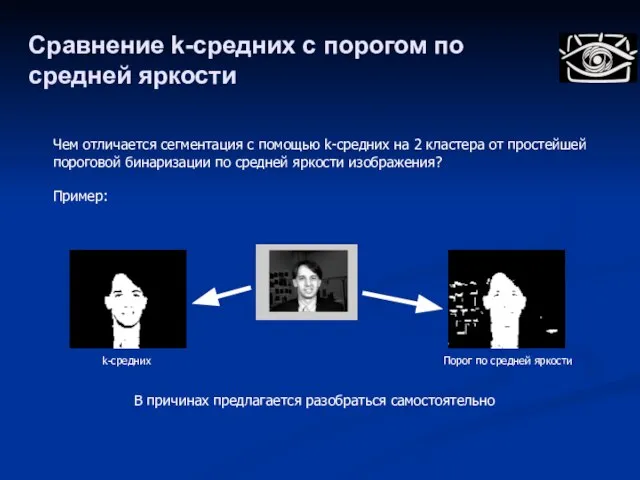
- 45. Сравнение k-средних с порогом по средней яркости Чем отличается сегментация с помощью k-средних на 2 кластера
- 46. Общие недостатки описанного Игнорируется пространственное расположение пикселей За исключением адаптивного порога, но и там соседство не
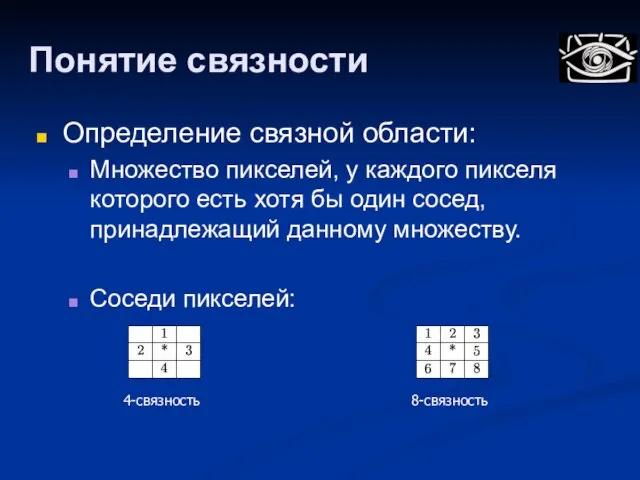
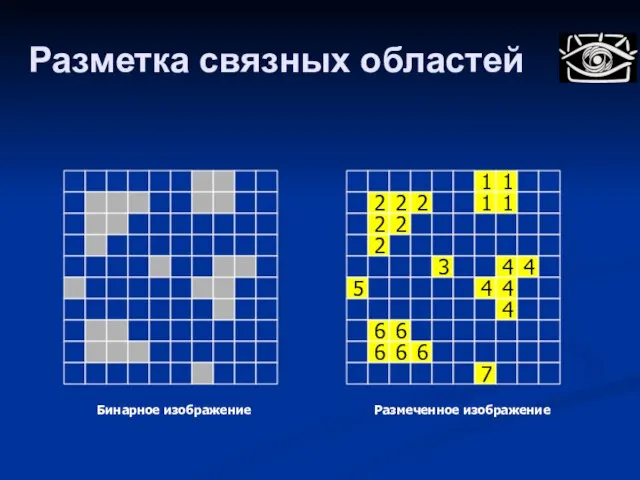
- 47. Понятие связности Определение связной области: Множество пикселей, у каждого пикселя которого есть хотя бы один сосед,
- 48. Разметка связных областей 1 1 2 2 2 1 1 2 2 2 3 4 4
- 49. Разрастание регионов (Region growing) Простая идея – начиная с некоторого “семени” обходить пиксели и объединять в
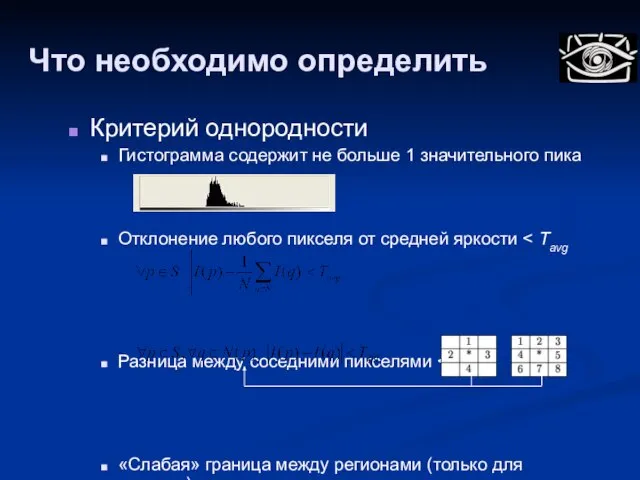
- 50. Что необходимо определить Критерий однородности Гистограмма содержит не больше 1 значительного пика Отклонение любого пикселя от
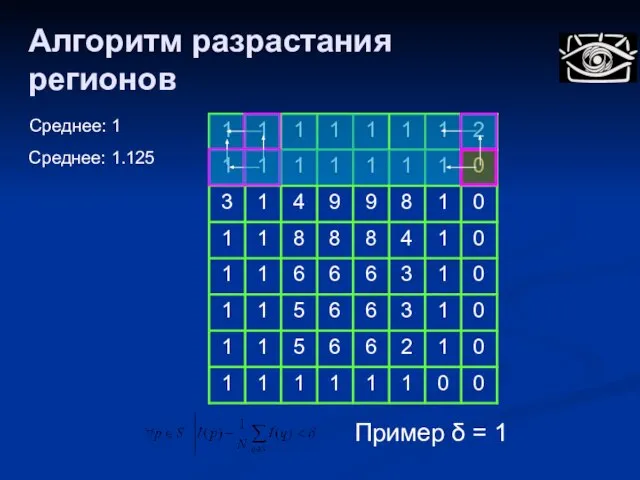
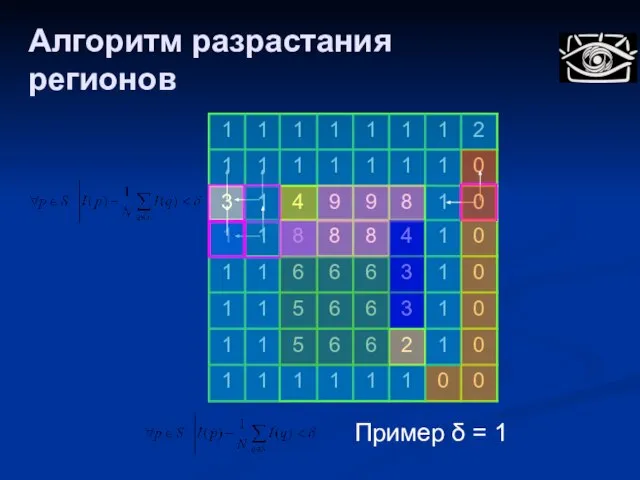
- 51. Пример δ = 1 Алгоритм разрастания регионов Среднее: 1 Среднее: 1.125
- 52. Алгоритм разрастания регионов Пример δ = 1
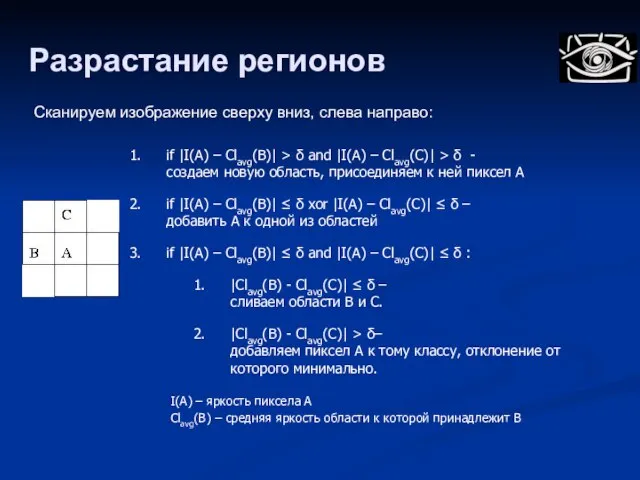
- 53. Разрастание регионов if |I(A) – Clavg(B)| > δ and |I(A) – Clavg(C)| > δ - создаем
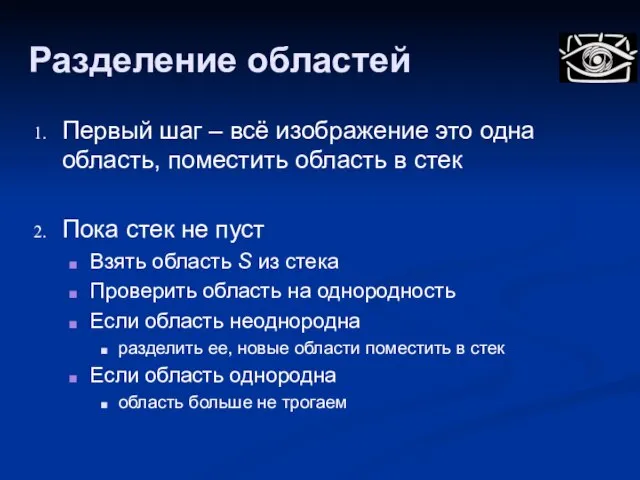
- 54. Разделение областей Первый шаг – всё изображение это одна область, поместить область в стек Пока стек
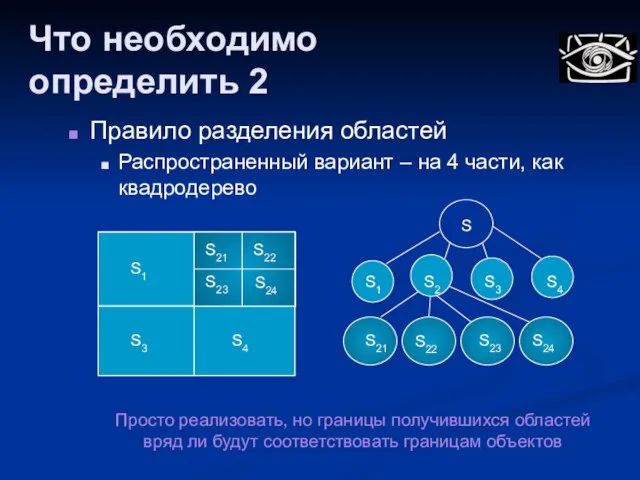
- 55. Что необходимо определить 2 Правило разделения областей Распространенный вариант – на 4 части, как квадродерево Просто
- 56. Пример Алгоритм разбиения (split)
- 57. Первое разбиение Алгоритм разбиения (split)
- 58. Второе разбиение Алгоритм разбиения (split)
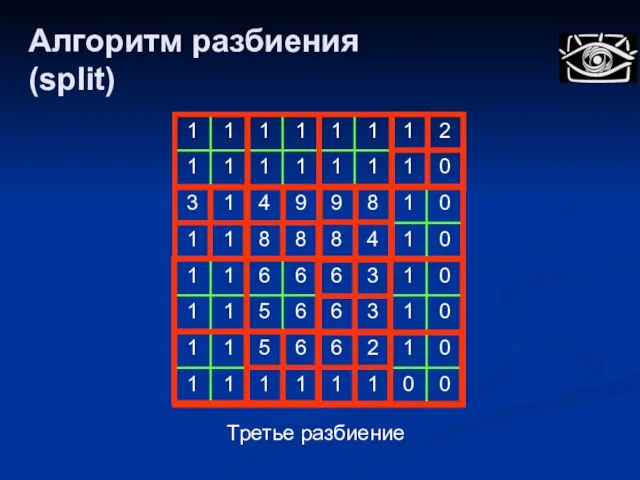
- 59. Третье разбиение Алгоритм разбиения (split)
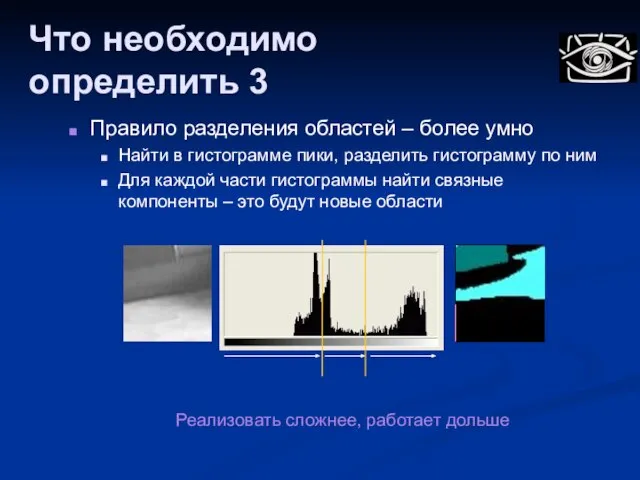
- 60. Что необходимо определить 3 Правило разделения областей – более умно Найти в гистограмме пики, разделить гистограмму
- 61. Слияние областей Первый шаг – каждый пиксель это отдельная область, поместить все области в стек Пока
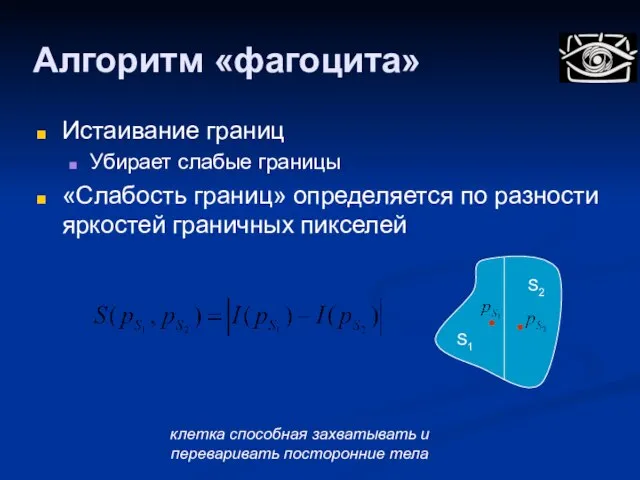
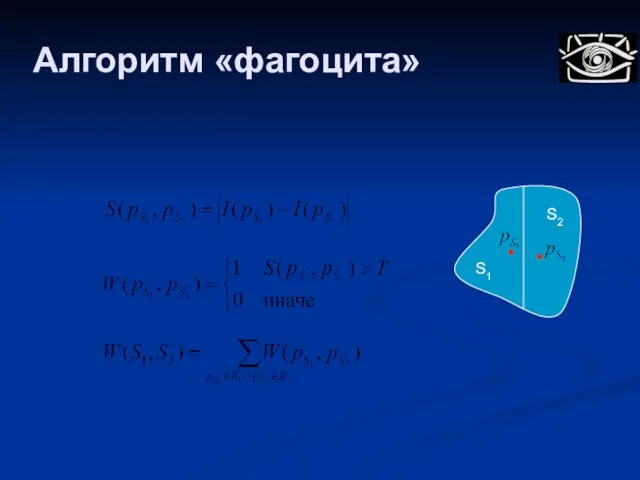
- 62. Алгоритм «фагоцита» Истаивание границ Убирает слабые границы «Слабость границ» определяется по разности яркостей граничных пикселей S1
- 63. Алгоритм «фагоцита» S1 S2
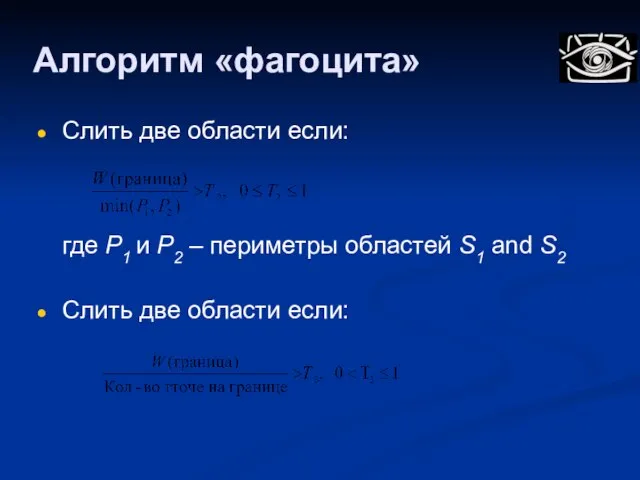
- 64. Алгоритм «фагоцита» Слить две области если: где P1 и P2 – периметры областей S1 and S2
- 65. Алгоритмы разбиения и слияния Недостатки: Разбиение Может дать слишком много регионов Если использовать квадродерево, границы скорее
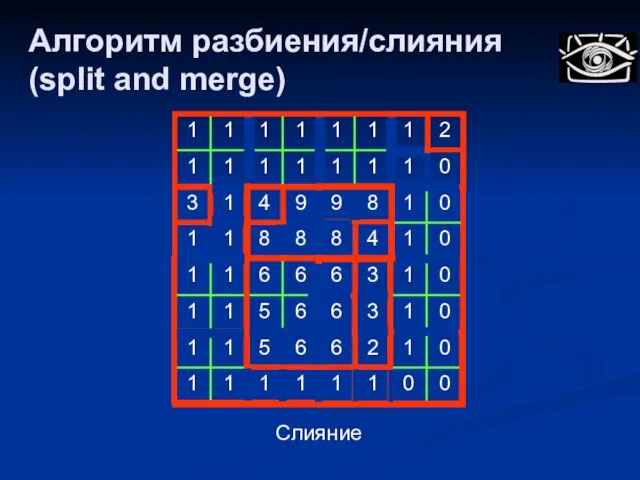
- 66. Алгоритм разбиения/слияния (split and merge) Идея: Сначала провести разбиение на небольшие однородные области Обычно используется принцип
- 67. Слияние Алгоритм разбиения/слияния (split and merge)
- 68. Результат Алгоритм разбиения/слияния (split and merge)
- 69. Результат Сравним с разрастанием регионов
- 70. Сравним подходы Сегментация на основе областей В результате всегда замкнутые границы областей Использование многоканальных изображений (RGB,
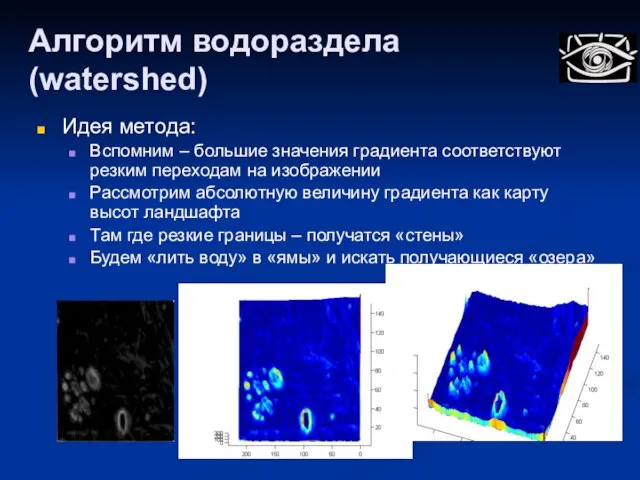
- 71. Алгоритм водораздела (watershed) Идея метода: Вспомним – большие значения градиента соответствуют резким переходам на изображении Рассмотрим
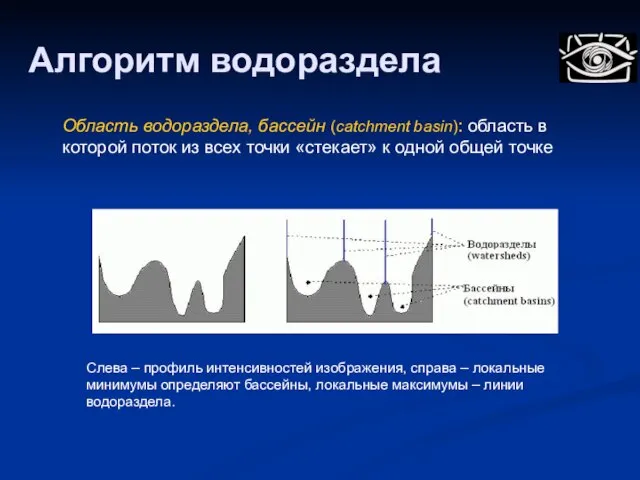
- 72. Алгоритм водораздела Область водораздела, бассейн (catchment basin): область в которой поток из всех точки «стекает» к
- 73. Алгоритм водораздела Алгоритм, как и разбиение дает множество небольших регионов Очень чувствителен к шуму – ищет
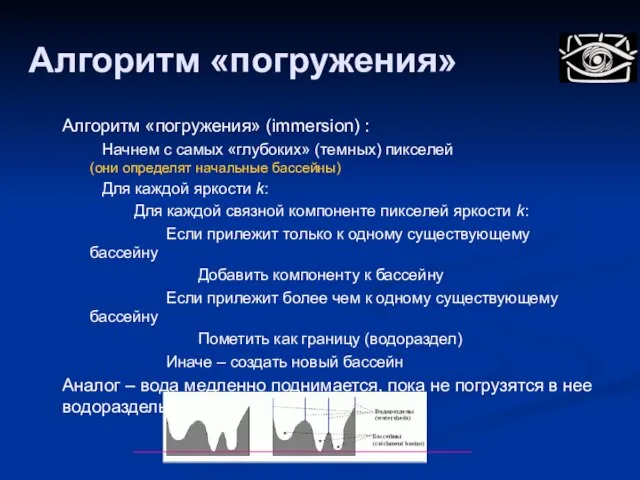
- 74. Алгоритм «погружения» Алгоритм «погружения» (immersion) : Начнем с самых «глубоких» (темных) пикселей (они определят начальные бассейны)
- 75. Алгоритм tobogganing Идея: Из каждого пикселя «спускаемся» в локальный минимум среди его соседей Спускаемся до тех
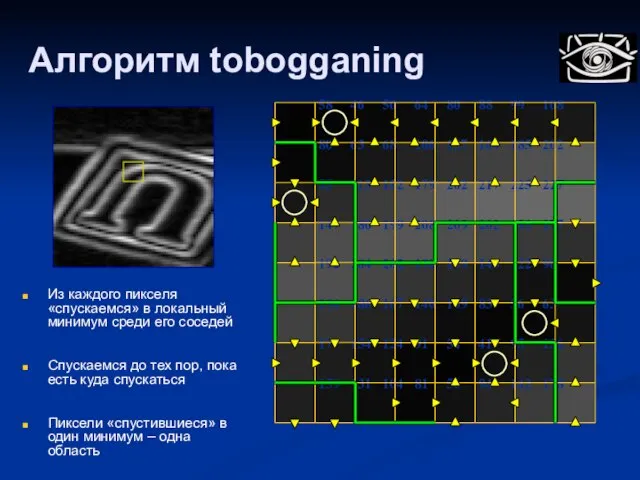
- 76. Алгоритм tobogganing 58 46 50 64 80 88 99 108 80 63 68 106 137 164
- 77. Алгоритм tobogganing 58 46 50 64 80 88 99 108 80 63 68 106 137 164
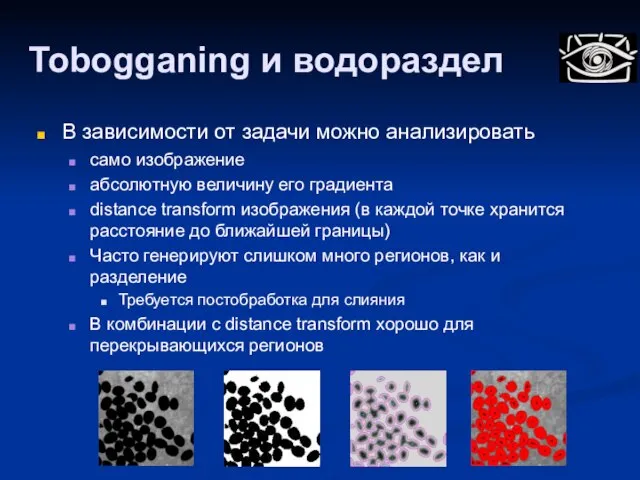
- 78. Tobogganing и водораздел В зависимости от задачи можно анализировать само изображение абсолютную величину его градиента distance
- 79. Методы теории графов Теория графов – хороший инструмент для работы с изображениями Хорошая теоретическая база Много
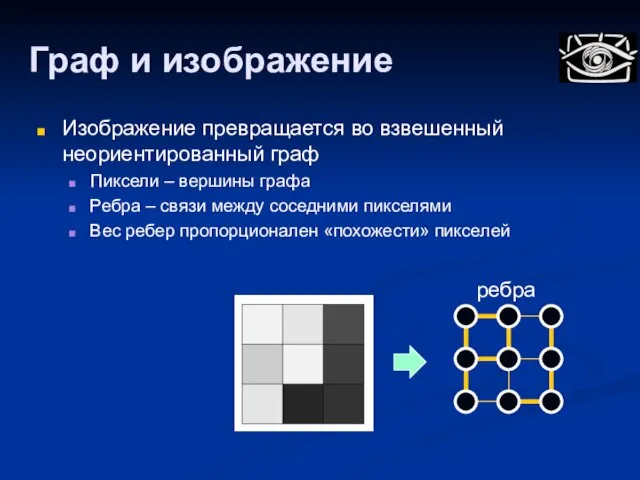
- 80. Граф и изображение Изображение превращается во взвешенный неориентированный граф Пиксели – вершины графа Ребра – связи
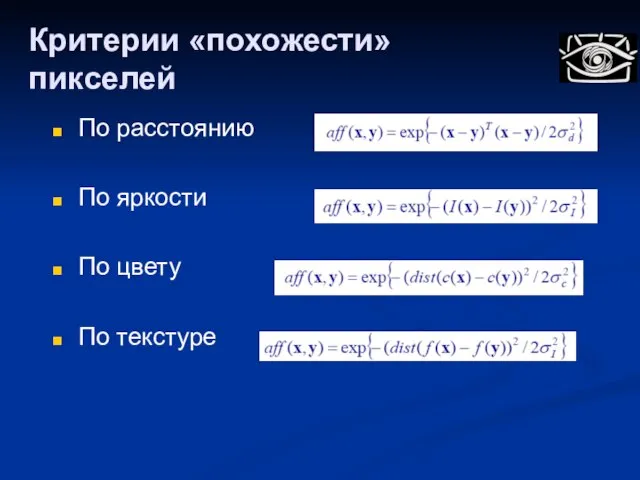
- 81. Критерии «похожести» пикселей По расстоянию По яркости По цвету По текстуре
- 82. Создать граф Разрезать граф Каждую связную компоненту после разреза рассматривать как отдельную область Сегментация с помощью
- 83. Разрез графа G=(V,E) Непересекающиеся подмножества вершин A и B из V Удаляем все ребра, связывающие A
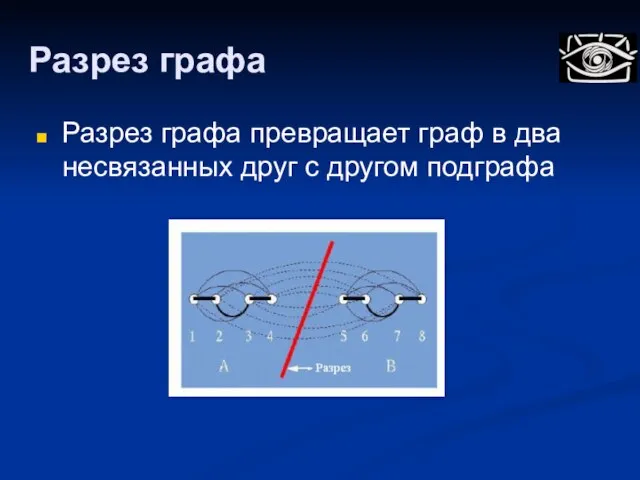
- 84. Разрез графа Разрез графа превращает граф в два несвязанных друг с другом подграфа
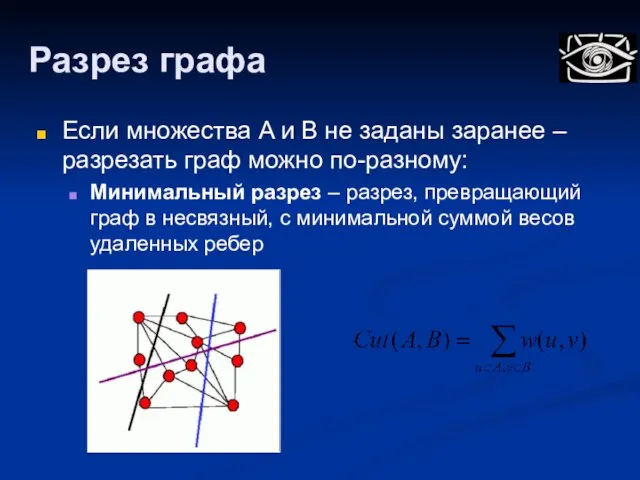
- 85. Разрез графа Если множества A и B не заданы заранее – разрезать граф можно по-разному: Минимальный
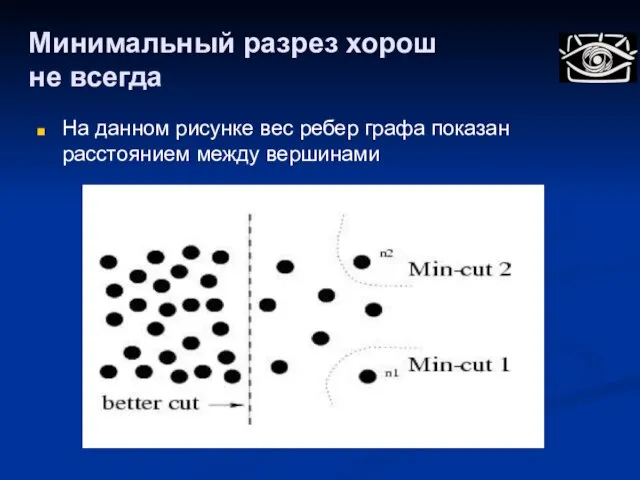
- 86. Минимальный разрез хорош не всегда На данном рисунке вес ребер графа показан расстоянием между вершинами
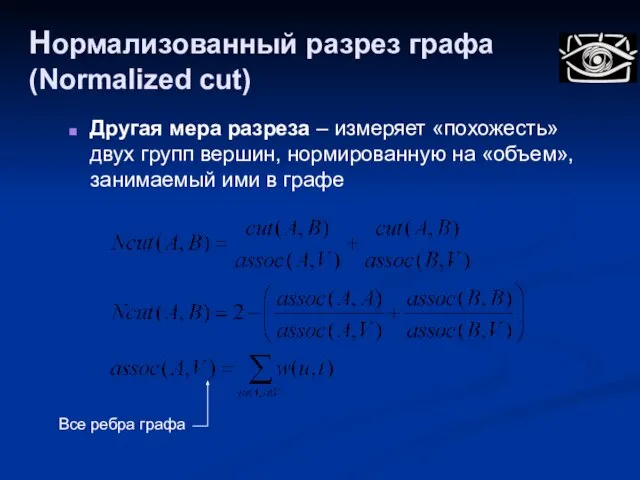
- 87. Нормализованный разрез графа (Normalized cut) Другая мера разреза – измеряет «похожесть» двух групп вершин, нормированную на
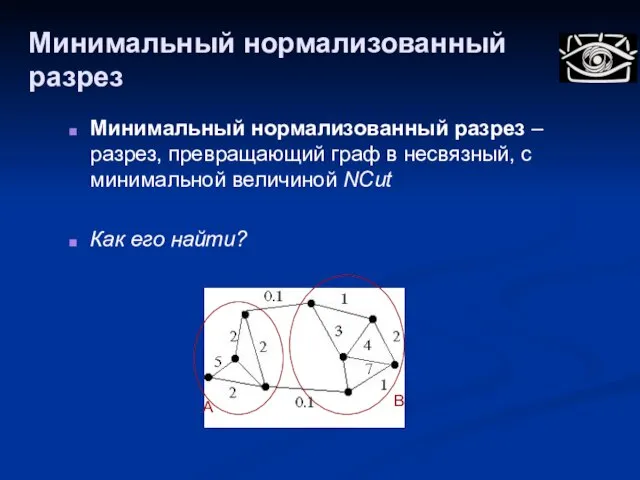
- 88. Минимальный нормализованный разрез Минимальный нормализованный разрез – разрез, превращающий граф в несвязный, с минимальной величиной NCut
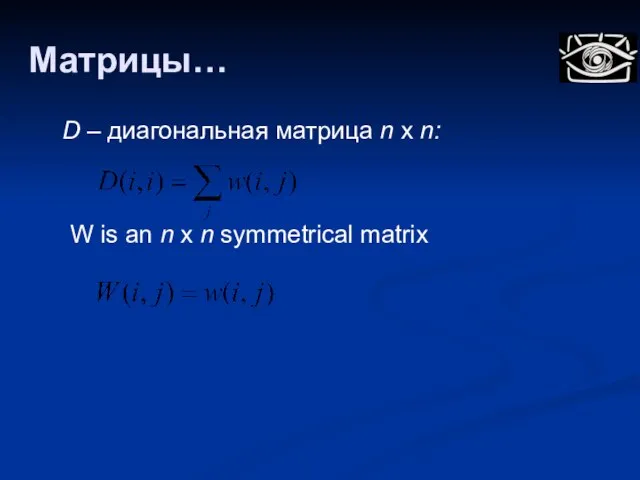
- 89. Матрицы… D – диагональная матрица n x n: W is an n x n symmetrical matrix
- 90. Можно вывести что: При условиях: Если разрешить задача сводится к задаче на собственные значения:
- 91. Алгоритм сегментации c помощью normalized cuts Задать граф на изображении. Рассчитать матрицы W и D Решить
- 92. Пример:
- 93. Подытожим: Рассмотрели следующие методы Использующие края Edge-based Пороговой фильтрации Thresholding k-средних k-means Разрастания регионов Region growing
- 94. Анализ областей после сегментации Владимир Вежневец, Антон Конушин Александр Вежневец Курс – «Введение в компьютерное зрение»
- 95. Какие параметры формы областей помогут различить объекты на этом примере?
- 96. Свойства области Характеристики границы области См. предыдущую лекцию Площадь Кол-во «дырок» внутри Центр масс Периметр Компактность
- 97. Площадь Кол-во пикселей в области
- 98. Центр масс Центр масс:
- 99. Периметр и компактность Периметр - количество пикселей принадлежащих границе области Компактность Наиболее компактная фигура – круг,
- 100. Подсчет периметра области Пиксель лежит на границе области, если он сам принадлежит области и хотя бы
- 101. Дискретный момент mij области определяется следующим образом: - значение пикселя изображения Моменты
- 102. X Y 7 Площадь 20 33 159 Моменты инерции 64 93 Моменты
- 103. Центральные моменты Инвариантны к переносу Центр масс области
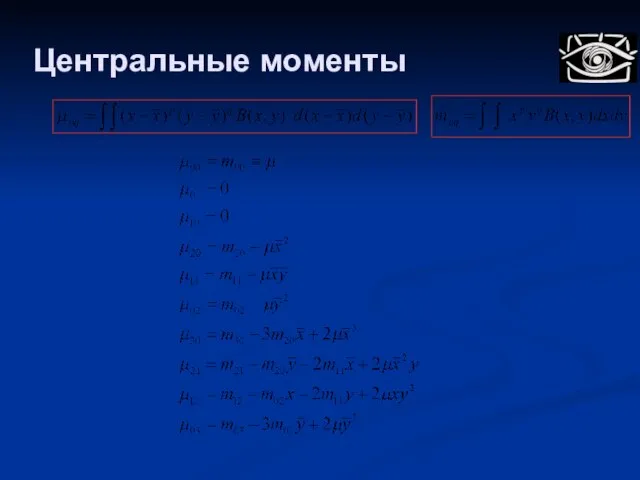
- 104. Центральные моменты
- 105. Ориентация главной оси инерции Главная ось Центр масс
- 106. Моменты Hu Инвариантны к повороту, переносу, скалированию
- 107. Пример
- 108. Инвариантные характеристики области Удлиненность, нецентрированность (эксцентриситет)
- 109. Цвет, яркость Цвет и яркость области тоже хорошие признаки. Варианты Гистограмма яркости, цветов в данной области
- 110. Немного о машинном обучении Мы рассмотрели сейчас методы «низкого уровня» Они анализируют небольшое кол-во «простой» информации
- 111. Задание Выдадим на следующей лекции Выполнятся будем на MATLAB Всем желающим получить задание нужно будет записаться
- 113. Скачать презентацию
Слайд 3Что такое сегментация?
Анализ высокого уровня:
отделение находящихся на изображении объектов от фона (и
Что такое сегментация?
Анализ высокого уровня:
отделение находящихся на изображении объектов от фона (и
Слайд 4Автоматика и интерактивность
Подразделяем
Автоматическая
Сегментация производимая без взаимодействия с пользователем
Картинка на входе, регионы на
Автоматика и интерактивность
Подразделяем
Автоматическая
Сегментация производимая без взаимодействия с пользователем
Картинка на входе, регионы на
Слайд 5Применение сегментации
Фото(видео)монтаж, композиция
Применение сегментации
Фото(видео)монтаж, композиция

Слайд 6Применение сегментации
Измерение параметров объектов
Применение сегментации
Измерение параметров объектов
Слайд 7Применение сегментации
Предобработка перед высокоуровневым анализом
Применение сегментации
Предобработка перед высокоуровневым анализом

Слайд 8Определение сегментации 1
«Жесткая» сегментация
Разбиение изображения на неперекрывающиеся области, покрывающие все изображение и
Определение сегментации 1
«Жесткая» сегментация
Разбиение изображения на неперекрывающиеся области, покрывающие все изображение и
Слайд 9Рассмотрим семейства методов:
Основанные на поиске краев
Основанные на формировании однородных областей
Метод водораздела /
Рассмотрим семейства методов:
Основанные на поиске краев
Основанные на формировании однородных областей
Метод водораздела /
Слайд 10Автоматическая сегментация
Как можно сформировать однородные области?
Отталкиваясь от неоднородности на границах
Пример – ищем
Автоматическая сегментация
Как можно сформировать однородные области?
Отталкиваясь от неоднородности на границах
Пример – ищем
Слайд 11Однородность
Варианты однородности:
По яркости
По цвету
По близости на изображении
По текстуре
По глубине
(Если есть 3D информация)
Однородность
Варианты однородности:
По яркости
По цвету
По близости на изображении
По текстуре
По глубине
(Если есть 3D информация)
Слайд 12Сегментация через поиск неоднородностей
Наиболее простой и чаще всего используемый вариант:
Поиск неоднородностей яркости
Сегментация через поиск неоднородностей
Наиболее простой и чаще всего используемый вариант:
Поиск неоднородностей яркости
Слайд 13Алгоритм
Найдём все контура на изображении алгоритмом Canny;
Найдем все замкнутые контура;
«Внутренности» замкнутых контуров
Алгоритм
Найдём все контура на изображении алгоритмом Canny;
Найдем все замкнутые контура;
«Внутренности» замкнутых контуров
Слайд 14Сегментация через поиск однородных областей
План
Сегментация без учета пространственных связей
Пороговая фильтрация
Кластеризация по цвету
Сегментация через поиск однородных областей
План
Сегментация без учета пространственных связей
Пороговая фильтрация
Кластеризация по цвету
Слайд 15Пороговая фильтрация
Разделение пикселей на n классов по их яркости
Чаще всего используется 2
Пороговая фильтрация
Разделение пикселей на n классов по их яркости
Чаще всего используется 2
Слайд 16Гистограммы
Гистограмма (одноканального изображения) – график распределения яркостей пикселей:
На горизонтальной оси -
Гистограммы
Гистограмма (одноканального изображения) – график распределения яркостей пикселей:
На горизонтальной оси -
Слайд 17Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Это
Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Это

Слайд 18Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Это
Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Это

Слайд 19Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Однако
Гистограммы
Свойства:
Рассчитываются глобально для всего изображения
Пространственная информация (расположение пикселей различной яркости) полностью игнорируется
Однако
Слайд 20Пороговая фильтрация
Яркий объект на темном фоне
Выбрать величину T разделяющую яркость объекта и
Пороговая фильтрация
Яркий объект на темном фоне
Выбрать величину T разделяющую яркость объекта и
Слайд 21Как определить величину T?
В каждом конкретном случае хотим уметь рассчитать правильный порог
Вариант
Как определить величину T?
В каждом конкретном случае хотим уметь рассчитать правильный порог
Вариант
Слайд 22Автоопределение величины T
Можно использовать следующее:
1. Предположение о яркости объектов
2. Размеры
Автоопределение величины T
Можно использовать следующее:
1. Предположение о яркости объектов
2. Размеры
Слайд 23Автоопределение величины T
Метод P-tile:
Если знаем (предполагаем) что объект занимает P% площади
T устанавливаем
Автоопределение величины T
Метод P-tile:
Если знаем (предполагаем) что объект занимает P% площади
T устанавливаем

Слайд 24Расчет T путем последовательных приближений
Частный случай алгоритма k-средних
Выбрать порог T равным середине
Расчет T путем последовательных приближений
Частный случай алгоритма k-средних
Выбрать порог T равным середине
Слайд 25Поиск пиков в гистограмме
Найти соседние локальные максимумы в гистограмме gi
Рассчитать меру «пиковости»
Поиск пиков в гистограмме
Найти соседние локальные максимумы в гистограмме gi
Рассчитать меру «пиковости»
Слайд 26Мера «пиковости»
Мера «пиковости»
Слайд 27Зашумленность гистограмм
93 пика
Это проблема – много «лишних» локальных максимумов
Зашумленность гистограмм
93 пика
Это проблема – много «лишних» локальных максимумов
Слайд 28Сглаживание гистограмм
Сглажено 1 раз
54 пика
«Пиковость» проходят 18
2 раза
21 пика
«Пиковость» проходят
Сглаживание гистограмм
Сглажено 1 раз
54 пика
«Пиковость» проходят 18
2 раза
21 пика
«Пиковость» проходят
Слайд 29Области найденные по пикам
Области найденные по пикам
Слайд 30Адаптивный порог
Проблема:
Яркость фона может быть разной в разных частях изображения
Единый порог не
Адаптивный порог
Проблема:
Яркость фона может быть разной в разных частях изображения
Единый порог не
Слайд 31Адаптивный порог
Для каждого пикселя изображения I(x, y):
В окрестности пикселя радиуса r высчитывается
Адаптивный порог
Для каждого пикселя изображения I(x, y):
В окрестности пикселя радиуса r высчитывается
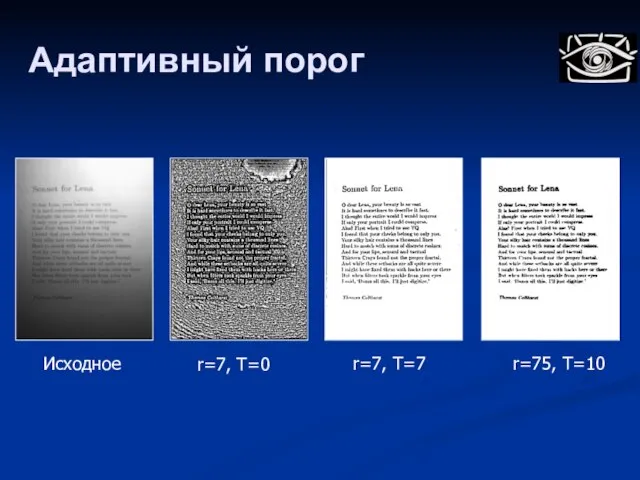
Слайд 32Адаптивный порог
r=7, T=0
r=7, T=7
r=75, T=10
Исходное
Адаптивный порог
r=7, T=0
r=7, T=7
r=75, T=10
Исходное
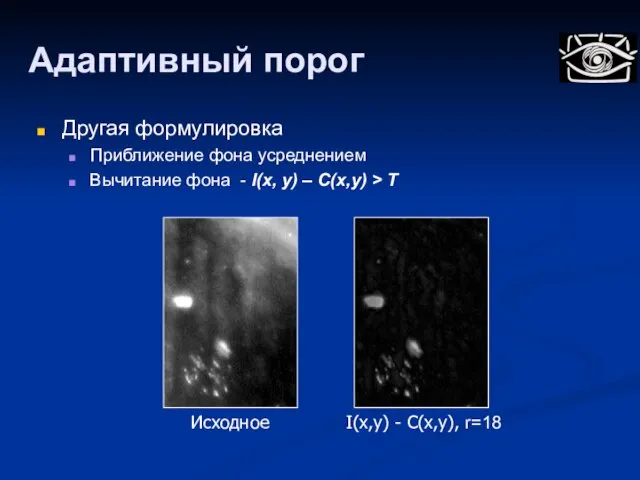
Слайд 33Адаптивный порог
Другая формулировка
Приближение фона усреднением
Вычитание фона - I(x, y) – C(x,y) >
Адаптивный порог
Другая формулировка
Приближение фона усреднением
Вычитание фона - I(x, y) – C(x,y) >
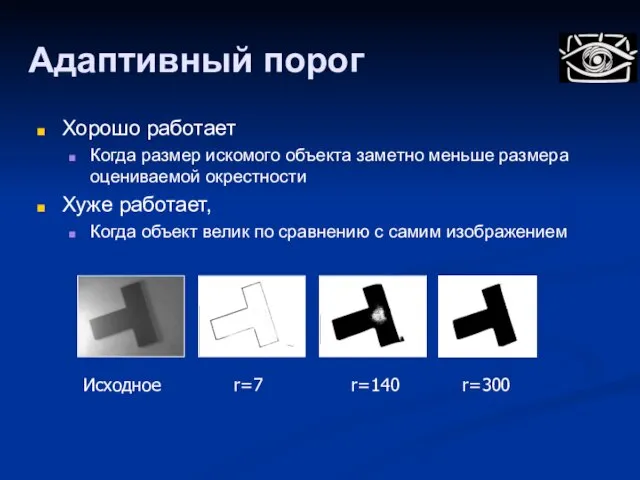
Слайд 34Адаптивный порог
Хорошо работает
Когда размер искомого объекта заметно меньше размера оцениваемой окрестности
Хуже работает,
Адаптивный порог
Хорошо работает
Когда размер искомого объекта заметно меньше размера оцениваемой окрестности
Хуже работает,
Слайд 35Кластеризация k-средних
Способ определения нескольких порогов одновременно
Нужно заранее знать k - количество диапазонов
Кластеризация k-средних
Способ определения нескольких порогов одновременно
Нужно заранее знать k - количество диапазонов
Слайд 36Алгоритм k-средних
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого vi i=1,…,p подсчитать
Алгоритм k-средних
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого vi i=1,…,p подсчитать
Слайд 37Пример кластеризации в 2D
Исходные данные
Пример кластеризации в 2D
Исходные данные
Слайд 38Пример кластеризации в 2D
Случайная инициализация центров кластеров (шаг 1)
Пример кластеризации в 2D
Случайная инициализация центров кластеров (шаг 1)
Слайд 39Пример кластеризации в 2D
Кластеры после первой итерации (шаг 2)
Пример кластеризации в 2D
Кластеры после первой итерации (шаг 2)
Слайд 40Пример кластеризации в 2D
Пересчет центров кластеров после первой итерации (шаг 3)
Пример кластеризации в 2D
Пересчет центров кластеров после первой итерации (шаг 3)
Слайд 41Пример кластеризации в 2D
Кластеры после второй итерации (шаг 2)
Пример кластеризации в 2D
Кластеры после второй итерации (шаг 2)

Слайд 42Пример кластеризации в 2D
Стабильная конфигурация после четвертой итерации
Пример кластеризации в 2D
Стабильная конфигурация после четвертой итерации
Слайд 43k-средних для сегментации
Если изображение одноканальное
vi = I(x, y) – работаем в одномерном
k-средних для сегментации
Если изображение одноканальное
vi = I(x, y) – работаем в одномерном
Слайд 44Алгоритм k-средних для одноканального изображения
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого
Алгоритм k-средних для одноканального изображения
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого
Слайд 45Сравнение k-средних с порогом по средней яркости
Чем отличается сегментация с помощью k-средних
Сравнение k-средних с порогом по средней яркости
Чем отличается сегментация с помощью k-средних
Слайд 46Общие недостатки описанного
Игнорируется пространственное расположение пикселей
За исключением адаптивного порога, но и там
Общие недостатки описанного
Игнорируется пространственное расположение пикселей
За исключением адаптивного порога, но и там
Слайд 47Понятие связности
Определение связной области:
Множество пикселей, у каждого пикселя которого есть хотя бы
Понятие связности
Определение связной области:
Множество пикселей, у каждого пикселя которого есть хотя бы
Слайд 48Разметка связных областей
1
1
2
2
2
1
1
2
2
2
3
4
4
5
4
4
4
6
6
6
6
6
7
Бинарное изображение
Размеченное изображение
Разметка связных областей
1
1
2
2
2
1
1
2
2
2
3
4
4
5
4
4
4
6
6
6
6
6
7
Бинарное изображение
Размеченное изображение
Слайд 49Разрастание регионов
(Region growing)
Простая идея – начиная с некоторого “семени” обходить пиксели и
Разрастание регионов
(Region growing)
Простая идея – начиная с некоторого “семени” обходить пиксели и
Слайд 50Что необходимо определить
Критерий однородности
Гистограмма содержит не больше 1 значительного пика
Отклонение любого
Что необходимо определить
Критерий однородности
Гистограмма содержит не больше 1 значительного пика
Отклонение любого
Слайд 51Пример δ = 1
Алгоритм разрастания регионов
Среднее: 1
Среднее: 1.125
Пример δ = 1
Алгоритм разрастания регионов
Среднее: 1
Среднее: 1.125
Слайд 52Алгоритм разрастания регионов
Пример δ = 1
Алгоритм разрастания регионов
Пример δ = 1
Слайд 53Разрастание регионов
if |I(A) – Clavg(B)| > δ and |I(A) – Clavg(C)| >
Разрастание регионов
if |I(A) – Clavg(B)| > δ and |I(A) – Clavg(C)| >
Слайд 54Разделение областей
Первый шаг – всё изображение это одна область, поместить область в
Разделение областей
Первый шаг – всё изображение это одна область, поместить область в
Слайд 55Что необходимо определить 2
Правило разделения областей
Распространенный вариант – на 4 части,
Что необходимо определить 2
Правило разделения областей
Распространенный вариант – на 4 части,
Слайд 56Пример
Алгоритм разбиения
(split)
Пример
Алгоритм разбиения
(split)

Слайд 57Первое разбиение
Алгоритм разбиения
(split)
Первое разбиение
Алгоритм разбиения
(split)

Слайд 58Второе разбиение
Алгоритм разбиения
(split)
Второе разбиение
Алгоритм разбиения
(split)

Слайд 59Третье разбиение
Алгоритм разбиения
(split)
Третье разбиение
Алгоритм разбиения
(split)
Слайд 60Что необходимо определить 3
Правило разделения областей – более умно
Найти в гистограмме пики,
Что необходимо определить 3
Правило разделения областей – более умно
Найти в гистограмме пики,
Слайд 61Слияние областей
Первый шаг – каждый пиксель это отдельная область, поместить все области
Слияние областей
Первый шаг – каждый пиксель это отдельная область, поместить все области
Слайд 62Алгоритм «фагоцита»
Истаивание границ
Убирает слабые границы
«Слабость границ» определяется по разности яркостей граничных пикселей
S1
S2
клетка
Алгоритм «фагоцита»
Истаивание границ
Убирает слабые границы
«Слабость границ» определяется по разности яркостей граничных пикселей
S1
S2
клетка
Слайд 63Алгоритм «фагоцита»
S1
S2
Алгоритм «фагоцита»
S1
S2
Слайд 64Алгоритм «фагоцита»
Слить две области если:
где P1 и P2 – периметры областей S1
Алгоритм «фагоцита»
Слить две области если:
где P1 и P2 – периметры областей S1
Слайд 65Алгоритмы разбиения и слияния
Недостатки:
Разбиение
Может дать слишком много регионов
Если использовать квадродерево, границы
Алгоритмы разбиения и слияния
Недостатки:
Разбиение
Может дать слишком много регионов
Если использовать квадродерево, границы
Слайд 66Алгоритм разбиения/слияния
(split and merge)
Идея:
Сначала провести разбиение на небольшие однородные области
Обычно используется принцип
Алгоритм разбиения/слияния
(split and merge)
Идея:
Сначала провести разбиение на небольшие однородные области
Обычно используется принцип
Слайд 67Слияние
Алгоритм разбиения/слияния
(split and merge)
Слияние
Алгоритм разбиения/слияния
(split and merge)
Слайд 68Результат
Алгоритм разбиения/слияния
(split and merge)
Результат
Алгоритм разбиения/слияния
(split and merge)

Слайд 69Результат
Сравним с разрастанием регионов
Результат
Сравним с разрастанием регионов

Слайд 70Сравним подходы
Сегментация на основе областей
В результате всегда замкнутые границы областей
Использование многоканальных
Сравним подходы
Сегментация на основе областей
В результате всегда замкнутые границы областей
Использование многоканальных
Слайд 71Алгоритм водораздела
(watershed)
Идея метода:
Вспомним – большие значения градиента соответствуют резким переходам на изображении
Рассмотрим
Алгоритм водораздела
(watershed)
Идея метода:
Вспомним – большие значения градиента соответствуют резким переходам на изображении
Рассмотрим
Слайд 72Алгоритм водораздела
Область водораздела, бассейн (catchment basin): область в которой поток из всех
Алгоритм водораздела
Область водораздела, бассейн (catchment basin): область в которой поток из всех
Слайд 73Алгоритм водораздела
Алгоритм, как и разбиение дает множество небольших регионов
Очень чувствителен к шуму
Алгоритм водораздела
Алгоритм, как и разбиение дает множество небольших регионов
Очень чувствителен к шуму

Слайд 74Алгоритм «погружения»
Алгоритм «погружения» (immersion) :
Начнем с самых «глубоких» (темных) пикселей
(они
Алгоритм «погружения»
Алгоритм «погружения» (immersion) :
Начнем с самых «глубоких» (темных) пикселей
(они
Слайд 75Алгоритм tobogganing
Идея:
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
Алгоритм tobogganing
Идея:
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
Слайд 76Алгоритм tobogganing
58 46 50 64 80 88 99 108
80 63 68 106 137 164 185 202
55 113 152 179 202 217 225 227
147 180 199 208 209 202 191 177
192 204 202 190 169 145 122 96
194 186 167 140 109 83 56 63
177 154 124 91 54 41 95 136
159 131 104 81 56 94 142 178
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
Алгоритм tobogganing
58 46 50 64 80 88 99 108
80 63 68 106 137 164 185 202
55 113 152 179 202 217 225 227
147 180 199 208 209 202 191 177
192 204 202 190 169 145 122 96
194 186 167 140 109 83 56 63
177 154 124 91 54 41 95 136
159 131 104 81 56 94 142 178
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
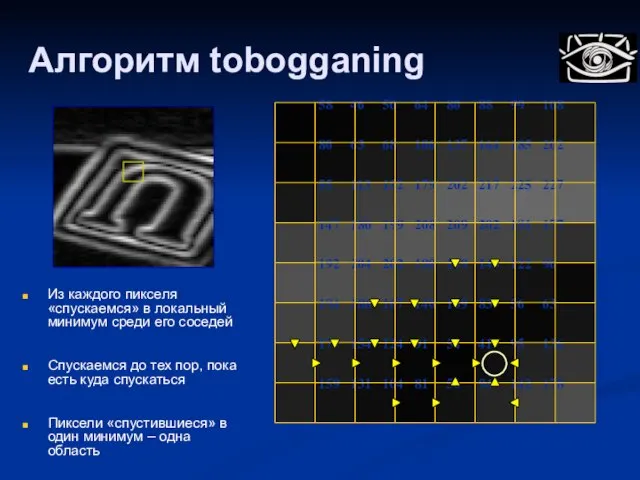
Слайд 77Алгоритм tobogganing
58 46 50 64 80 88 99 108
80 63 68 106 137 164 185 202
55 113 152 179 202 217 225 227
147 180 199 208 209 202 191 177
192 204 202 190 169 145 122 96
194 186 167 140 109 83 56 63
177 154 124 91 54 41 95 136
159 131 104 81 56 94 142 178
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
Алгоритм tobogganing
58 46 50 64 80 88 99 108
80 63 68 106 137 164 185 202
55 113 152 179 202 217 225 227
147 180 199 208 209 202 191 177
192 204 202 190 169 145 122 96
194 186 167 140 109 83 56 63
177 154 124 91 54 41 95 136
159 131 104 81 56 94 142 178
Из каждого пикселя «спускаемся» в локальный минимум среди его соседей
Спускаемся до
Слайд 78Tobogganing и водораздел
В зависимости от задачи можно анализировать
само изображение
абсолютную величину его
Tobogganing и водораздел
В зависимости от задачи можно анализировать
само изображение
абсолютную величину его
Слайд 79Методы теории графов
Теория графов – хороший инструмент для работы с изображениями
Хорошая теоретическая
Методы теории графов
Теория графов – хороший инструмент для работы с изображениями
Хорошая теоретическая
Слайд 80Граф и изображение
Изображение превращается во взвешенный неориентированный граф
Пиксели – вершины графа
Ребра –
Граф и изображение
Изображение превращается во взвешенный неориентированный граф
Пиксели – вершины графа
Ребра –
Слайд 81Критерии «похожести» пикселей
По расстоянию
По яркости
По цвету
По текстуре
Критерии «похожести» пикселей
По расстоянию
По яркости
По цвету
По текстуре
Слайд 82Создать граф
Разрезать граф
Каждую связную компоненту после разреза рассматривать как отдельную область
Сегментация с
Создать граф
Разрезать граф
Каждую связную компоненту после разреза рассматривать как отдельную область
Сегментация с
Слайд 83Разрез графа
G=(V,E)
Непересекающиеся подмножества вершин A и B из V
Удаляем все ребра, связывающие
Разрез графа
G=(V,E)
Непересекающиеся подмножества вершин A и B из V
Удаляем все ребра, связывающие
Слайд 84Разрез графа
Разрез графа превращает граф в два несвязанных друг с другом подграфа
Разрез графа
Разрез графа превращает граф в два несвязанных друг с другом подграфа
Слайд 85Разрез графа
Если множества A и B не заданы заранее – разрезать граф
Разрез графа
Если множества A и B не заданы заранее – разрезать граф
Слайд 86Минимальный разрез хорош
не всегда
На данном рисунке вес ребер графа показан расстоянием
Минимальный разрез хорош
не всегда
На данном рисунке вес ребер графа показан расстоянием
Слайд 87Нормализованный разрез графа
(Normalized cut)
Другая мера разреза – измеряет «похожесть» двух групп вершин,
Нормализованный разрез графа
(Normalized cut)
Другая мера разреза – измеряет «похожесть» двух групп вершин,
Слайд 88Минимальный нормализованный разрез
Минимальный нормализованный разрез – разрез, превращающий граф в несвязный, с
Минимальный нормализованный разрез
Минимальный нормализованный разрез – разрез, превращающий граф в несвязный, с
Слайд 89Матрицы…
D – диагональная матрица n x n:
W is an n x n
Матрицы…
D – диагональная матрица n x n:
W is an n x n
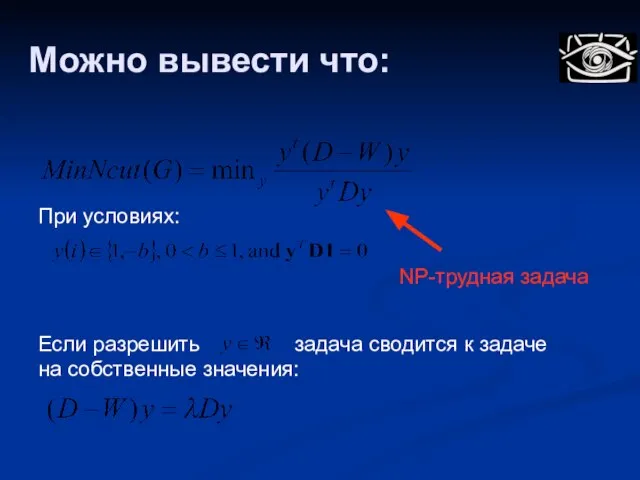
Слайд 90Можно вывести что:
При условиях:
Если разрешить задача сводится к задаче на собственные значения:
Можно вывести что:
При условиях:
Если разрешить задача сводится к задаче на собственные значения:
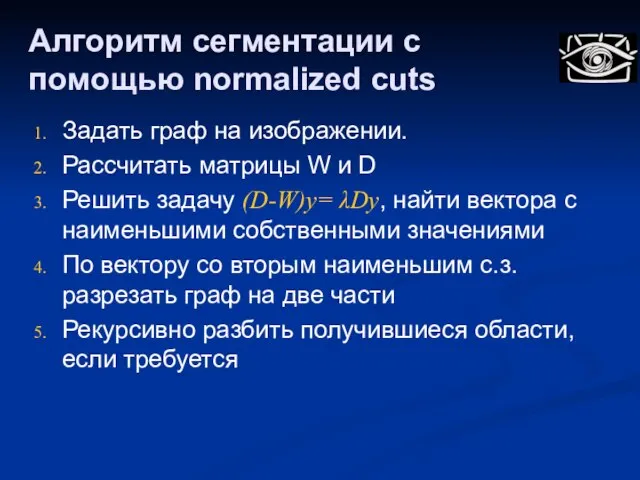
Слайд 91Алгоритм сегментации c помощью normalized cuts
Задать граф на изображении.
Рассчитать матрицы W и
Алгоритм сегментации c помощью normalized cuts
Задать граф на изображении.
Рассчитать матрицы W и
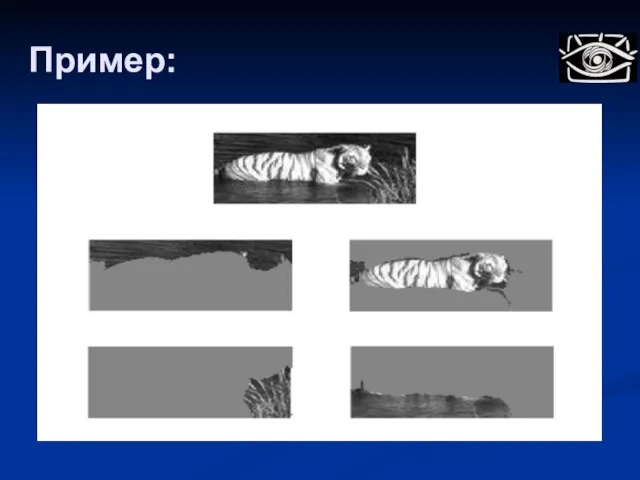
Слайд 92Пример:
Пример:
Слайд 93Подытожим:
Рассмотрели следующие методы
Использующие края
Edge-based
Пороговой фильтрации
Thresholding
k-средних
k-means
Разрастания регионов
Region growing
Разделения / слияния
Split and merge
Водораздела
Watershed, tobogganing
Нормализованный
Подытожим:
Рассмотрели следующие методы
Использующие края
Edge-based
Пороговой фильтрации
Thresholding
k-средних
k-means
Разрастания регионов
Region growing
Разделения / слияния
Split and merge
Водораздела
Watershed, tobogganing
Нормализованный
Слайд 94Анализ областей после сегментации
Владимир Вежневец, Антон Конушин
Александр Вежневец
Курс – «Введение в компьютерное
Анализ областей после сегментации
Владимир Вежневец, Антон Конушин
Александр Вежневец
Курс – «Введение в компьютерное
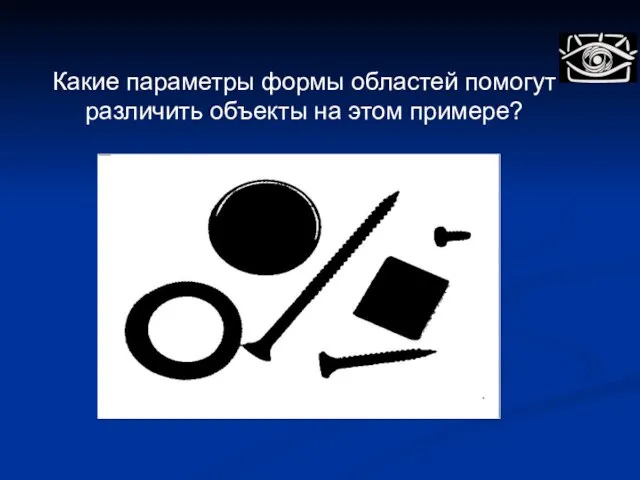
Слайд 95Какие параметры формы областей помогут различить объекты на этом примере?
Какие параметры формы областей помогут различить объекты на этом примере?
Слайд 96Свойства области
Характеристики границы области
См. предыдущую лекцию
Площадь
Кол-во «дырок» внутри
Центр масс
Периметр
Компактность
Моменты
Ориентация главной оси
Цвет/яркость
Свойства области
Характеристики границы области
См. предыдущую лекцию
Площадь
Кол-во «дырок» внутри
Центр масс
Периметр
Компактность
Моменты
Ориентация главной оси
Цвет/яркость
Слайд 97Площадь
Кол-во пикселей в области
Площадь
Кол-во пикселей в области
Слайд 98Центр масс
Центр масс:
Центр масс
Центр масс:
Слайд 99Периметр и компактность
Периметр - количество пикселей принадлежащих границе области
Компактность
Наиболее компактная фигура –
Периметр и компактность
Периметр - количество пикселей принадлежащих границе области
Компактность
Наиболее компактная фигура –

Слайд 100Подсчет периметра области
Пиксель лежит на границе области, если он сам принадлежит
области
Подсчет периметра области
Пиксель лежит на границе области, если он сам принадлежит области

Слайд 101Дискретный момент mij области определяется следующим образом:
- значение пикселя изображения
Моменты
Дискретный момент mij области определяется следующим образом:
- значение пикселя изображения
Моменты
Слайд 102X
Y
7
Площадь
20
33
159
Моменты инерции
64
93
Моменты
X
Y
7
Площадь
20
33
159
Моменты инерции
64
93
Моменты

Слайд 103Центральные моменты
Инвариантны к переносу
Центр масс области
Центральные моменты
Инвариантны к переносу
Центр масс области
Слайд 104Центральные моменты
Центральные моменты
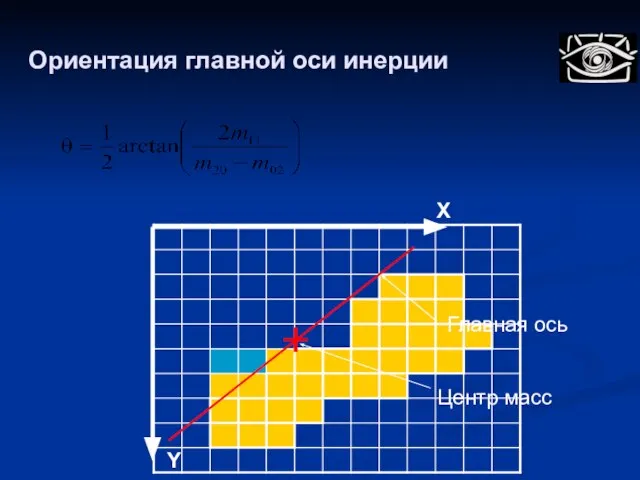
Слайд 105Ориентация главной оси инерции
Главная ось
Центр масс
Ориентация главной оси инерции
Главная ось
Центр масс
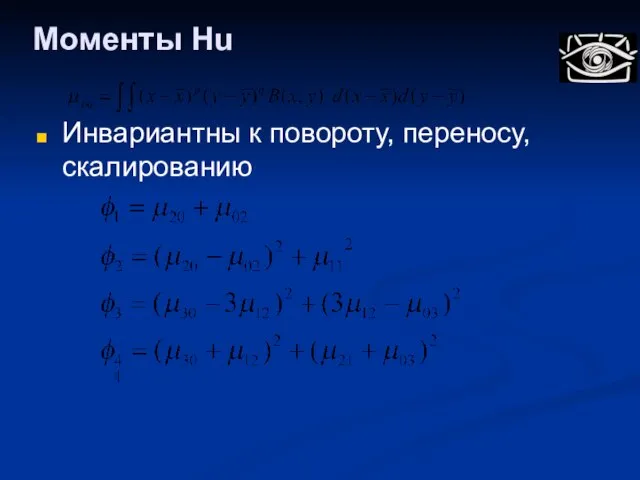
Слайд 106Моменты Hu
Инвариантны к повороту, переносу, скалированию
Моменты Hu
Инвариантны к повороту, переносу, скалированию
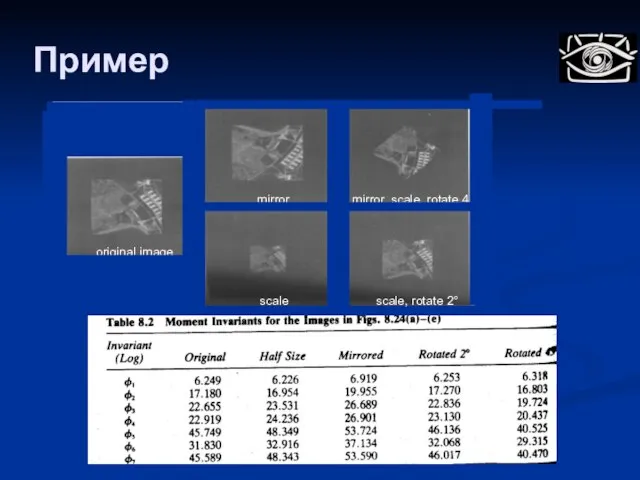
Слайд 107Пример
Пример
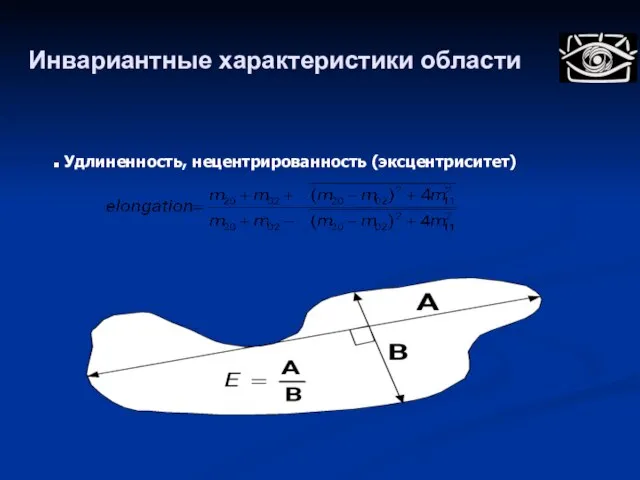
Слайд 108Инвариантные характеристики области
Удлиненность, нецентрированность (эксцентриситет)
Инвариантные характеристики области
Удлиненность, нецентрированность (эксцентриситет)
Слайд 109Цвет, яркость
Цвет и яркость области тоже хорошие признаки. Варианты
Гистограмма яркости, цветов в
Цвет, яркость
Цвет и яркость области тоже хорошие признаки. Варианты
Гистограмма яркости, цветов в
Слайд 110Немного о машинном обучении
Мы рассмотрели сейчас методы «низкого уровня»
Они анализируют небольшое кол-во
Немного о машинном обучении
Мы рассмотрели сейчас методы «низкого уровня»
Они анализируют небольшое кол-во
Слайд 111Задание
Выдадим на следующей лекции
Выполнятся будем на MATLAB
Всем желающим получить задание нужно будет
Задание
Выдадим на следующей лекции
Выполнятся будем на MATLAB
Всем желающим получить задание нужно будет
 Оценка конкурентных преимуществ
Оценка конкурентных преимуществ Организация контроля качества
Организация контроля качества Продукция бизнес-проекта
Продукция бизнес-проекта Титан
Титан Выполнение алгоритмов для исполнителя (А18)
Выполнение алгоритмов для исполнителя (А18) Здоровый образ жизни
Здоровый образ жизни Принципы налогообложения
Принципы налогообложения Территория автоматизации региональных систем ЗАГС РФ на базе программного комплекса «Находка-ЗАГС» г. Москва | г. Байконур Алтайск
Территория автоматизации региональных систем ЗАГС РФ на базе программного комплекса «Находка-ЗАГС» г. Москва | г. Байконур Алтайск Микроблоги и бренды Рунета
Микроблоги и бренды Рунета О межрегиональном взаимодействии по внедрению ФГОС и готовности регионов к переходу на ФГОС начального общего образования с 1 с
О межрегиональном взаимодействии по внедрению ФГОС и готовности регионов к переходу на ФГОС начального общего образования с 1 с Презентация на тему Устройство компьютера
Презентация на тему Устройство компьютера  О результатах внедрения федеральных государственных требований к структуре основной общеобразовательной программы дошкольного
О результатах внедрения федеральных государственных требований к структуре основной общеобразовательной программы дошкольного  О РЕЗУЛЬТАТАХ РАБОТЫ И ПЕРСПЕКТИВАХ РАЗВИТИЯ МЕЖДУНАРОДНОГО СОТРУДНИЧЕСТВА АлтГУ (состояние на 10.03.09)?
О РЕЗУЛЬТАТАХ РАБОТЫ И ПЕРСПЕКТИВАХ РАЗВИТИЯ МЕЖДУНАРОДНОГО СОТРУДНИЧЕСТВА АлтГУ (состояние на 10.03.09)? титул констатирующего
титул констатирующего Ответьте на вопросы:
Ответьте на вопросы: Нейропсихологический подход к коррекции пространственных представлений
Нейропсихологический подход к коррекции пространственных представлений Презентация на тему Поездка в автобусе, троллейбусе, трамвае
Презентация на тему Поездка в автобусе, троллейбусе, трамвае Части слова. Корень
Части слова. Корень Буквы И и Е в приставках НЕ - и НИ - отрицательных наречий
Буквы И и Е в приставках НЕ - и НИ - отрицательных наречий Состав и структура активов АИФов и ПИФов
Состав и структура активов АИФов и ПИФов Умный сад
Умный сад Снимаю с вас задачу по ведению группы за 4900 рублей в месяц
Снимаю с вас задачу по ведению группы за 4900 рублей в месяц Учет и планирование расходов авиакомпании
Учет и планирование расходов авиакомпании Показатели инновационной деятельности
Показатели инновационной деятельности Десятичные дроби. Десятичная запись дробных чисел
Десятичные дроби. Десятичная запись дробных чисел Государственный бюджет. План доходов и расходов государства
Государственный бюджет. План доходов и расходов государства «Налоговое планирование»
«Налоговое планирование» Производственная практика в ООО Авиа- тур 45
Производственная практика в ООО Авиа- тур 45