- Робот - Снегоуборщик

Содержание
- 2. Актуальность Потребность человека минимизировать ручной труд и автоматизировать бытовые процессы; Сокращение времени на уборку снега ;
- 3. Цель: Создать Робота-Снегоуборщика Задачи: - Изучить аналоги роботов - Изучить устройства GPS навигаторов - Смоделировать проект
- 4. Существующие аналоги Робот-Снегоуборщик Omi Plow
- 5. Принцип работы Робот-Снегоуборщик будет работать по принципу шнекоротора. Для усовершенствования проекта к шнекороторной снегоуборочной машине предполагается
- 6. Принцип работы навигационной системы Робот с GPS-навигацией обладает всеми доступными возможностями системы глобального позиционирования (аббревиатура GPS).
- 7. Отечественные аналоги GPS Устройства с GPS навигацией также могут обладать системой ГЛОНАСС. Она представляет собой практически
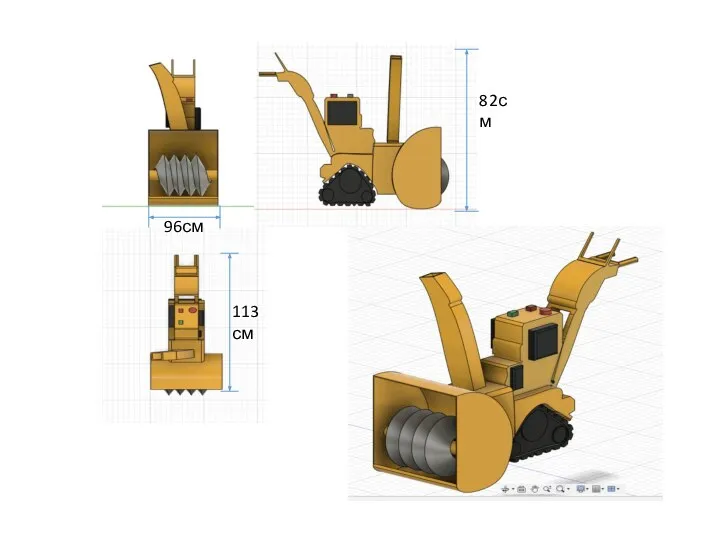
- 8. 113см 96см 82см
- 9. Устройство модели бензиновый мотор (двигатель внутреннего сгорания) Система управления c GPS Выпускной желоб Ковш Гусеничное шасси
- 11. Скачать презентацию
Слайд 2Актуальность
Потребность человека минимизировать ручной труд и автоматизировать бытовые процессы;
Сокращение времени на уборку
Актуальность
Потребность человека минимизировать ручной труд и автоматизировать бытовые процессы;
Сокращение времени на уборку
Слайд 3Цель: Создать Робота-Снегоуборщика
Задачи:
- Изучить аналоги роботов
- Изучить устройства GPS навигаторов
- Смоделировать проект
Цель: Создать Робота-Снегоуборщика
Задачи:
- Изучить аналоги роботов
- Изучить устройства GPS навигаторов
- Смоделировать проект
Слайд 4Существующие аналоги
Робот-Снегоуборщик Omi Plow
Существующие аналоги
Робот-Снегоуборщик Omi Plow

Слайд 5Принцип работы
Робот-Снегоуборщик будет работать по принципу шнекоротора. Для усовершенствования проекта к шнекороторной
Принцип работы
Робот-Снегоуборщик будет работать по принципу шнекоротора. Для усовершенствования проекта к шнекороторной
Слайд 6Принцип работы навигационной системы
Робот с GPS-навигацией обладает всеми доступными возможностями системы глобального
Принцип работы навигационной системы
Робот с GPS-навигацией обладает всеми доступными возможностями системы глобального
Слайд 7Отечественные аналоги GPS
Устройства с GPS навигацией также могут обладать системой ГЛОНАСС. Она
Отечественные аналоги GPS
Устройства с GPS навигацией также могут обладать системой ГЛОНАСС. Она
Слайд 8113см
96см
82см
113см
96см
82см
Слайд 9Устройство модели
бензиновый мотор (двигатель внутреннего сгорания)
Система управления c GPS
Выпускной желоб
Ковш
Гусеничное шасси
Шнек
Управление
Устройство модели
бензиновый мотор (двигатель внутреннего сгорания)
Система управления c GPS
Выпускной желоб
Ковш
Гусеничное шасси
Шнек
Управление

 Презентация на тему Теплопроводность
Презентация на тему Теплопроводность  Движение тел. Материальная точка
Движение тел. Материальная точка Презентация на тему: Термодинамика
Презентация на тему: Термодинамика Альтернативные источники энергии
Альтернативные источники энергии Закон Джоуля-Ленца
Закон Джоуля-Ленца Виды излучений. Источники света
Виды излучений. Источники света Техническая механика. Статика. Основные понятия и аксиомы статики
Техническая механика. Статика. Основные понятия и аксиомы статики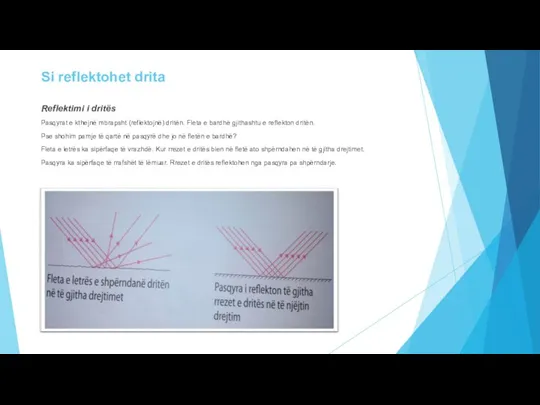 Reflektimi i drites
Reflektimi i drites Механика: кинематика
Механика: кинематика Презентация на тему Электродинамика
Презентация на тему Электродинамика  Решение задач по теме Законы Ньютона. 9 класс
Решение задач по теме Законы Ньютона. 9 класс Энергия связи ядра. Ядерные реакции
Энергия связи ядра. Ядерные реакции Презентация на тему Статика
Презентация на тему Статика  Тепловые двигатели
Тепловые двигатели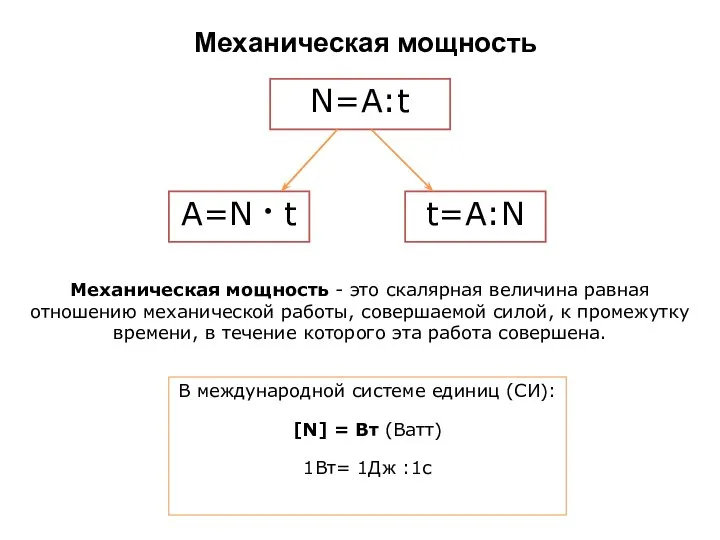 Механическая мощность
Механическая мощность Раскачивание мостов. Процесс синхронизации
Раскачивание мостов. Процесс синхронизации Проект: Кошкина радость
Проект: Кошкина радость Презентация на тему Сила тяжести и вес
Презентация на тему Сила тяжести и вес  КПД нагревателя
КПД нагревателя Презентация на тему Колебания
Презентация на тему Колебания  Гамма- излучение
Гамма- излучение Решение задач. Сила Ампера
Решение задач. Сила Ампера Сила трения
Сила трения Гальваномагнитные свойства тонких пленок висмута, легированных оловом, в интервале температуры 77-300 К
Гальваномагнитные свойства тонких пленок висмута, легированных оловом, в интервале температуры 77-300 К Здравствуй, физика!
Здравствуй, физика! Движение по окружности
Движение по окружности Дисперсия, интерференция, дифракция света
Дисперсия, интерференция, дифракция света Улитка или архимедов винт
Улитка или архимедов винт