- Теория динамических систем

Содержание
- 2. ДС Под динамической системой понимают любой процесс или объект, для которого характерно: однозначно определенное состояние как
- 4. Число степеней свободы – наименьшее число независимых величин (координат), необходимых для однозначного определения состояния системы. Фазовое
- 5. Одномерное и двумерное фазовое пространство
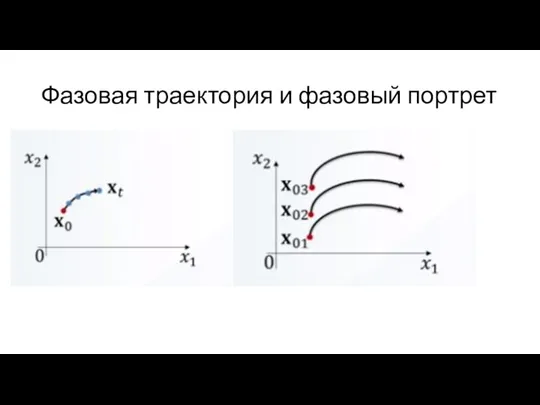
- 6. Фазовая траектория и фазовый портрет
- 7. Формальное определение динамической системы фазовое пространство Х, образующее полное метрическое пространство; множество моментов времени Т; оператор
- 8. Классификация динамических систем с непрерывным временем (континуальные системы), т.е. системы, которые задаются дифференциальными уравнениями: ẋ =
- 9. Классификация динамических систем - нелинейные: Et (x + x') ≠ Et (x) + Et (x') автономные,
- 10. Классификация динамических систем детерминированные – это все рассмотренные выше системы, когда нет шумов, случайных слагаемых. случайные
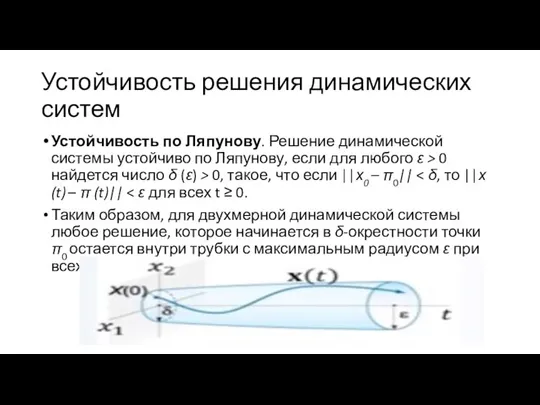
- 11. Устойчивость решения динамических систем Устойчивость по Ляпунову. Решение динамической системы устойчиво по Ляпунову, если для любого
- 12. Устойчивость решения динамических систем Асимптотическая устойчивость. Если решение динамической системы устойчиво не только по Ляпунову, но
- 13. Устойчивость решения динамических систем Экспоненциальная устойчивость. Если решение динамической системы устойчиво не только по Ляпунову, но
- 14. Одномерные динамические системы Одномерные динамические системы – это динамические системы на прямой или динамические системы с
- 15. 1. Аналитический подход решения задачи Коши Формулировка задачи Коши: известен закон эволюции и начальное состояние системы,
- 16. 2. Численное решение задачи Коши это численный эксперимент, применение численных методов. Однако не всегда удается получить
- 17. 3. Качественный анализ или метод фазовых траекторий Позволяет по заданному закону эволюции получить фазовый портрет. Применим
- 18. Качественный анализ динамических систем Задача Коши в рамках качественного анализа формулируется следующим образом. Входные данные: ẋt
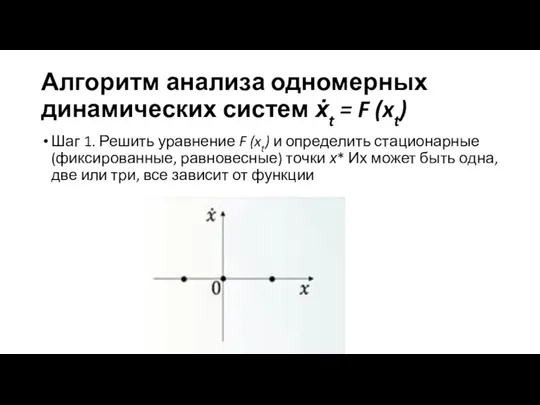
- 19. Алгоритм анализа одномерных динамических систем ẋt = F (xt) Шаг 1. Решить уравнение F (xt) и
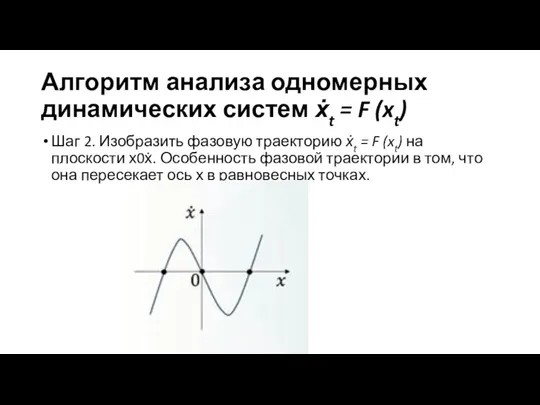
- 20. Алгоритм анализа одномерных динамических систем ẋt = F (xt) Шаг 2. Изобразить фазовую траекторию ẋt =
- 21. Алгоритм анализа одномерных динамических систем ẋt = F (xt) Шаг 3. Классифицировать стационарные точки, т е.
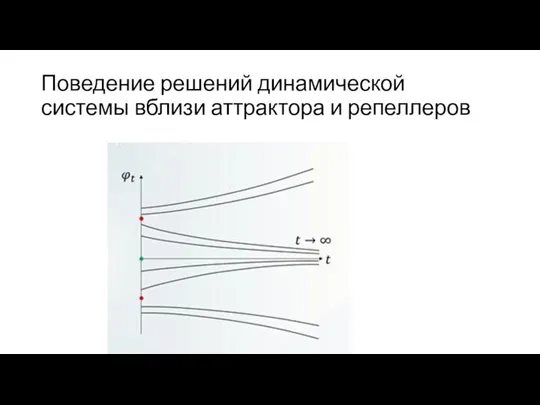
- 22. Поведение решений динамической системы вблизи аттрактора и репеллеров
- 23. Модель Т. Мальтуса Т. Мальтус – известный демограф, экономист. Он показал в своем труде «О росте
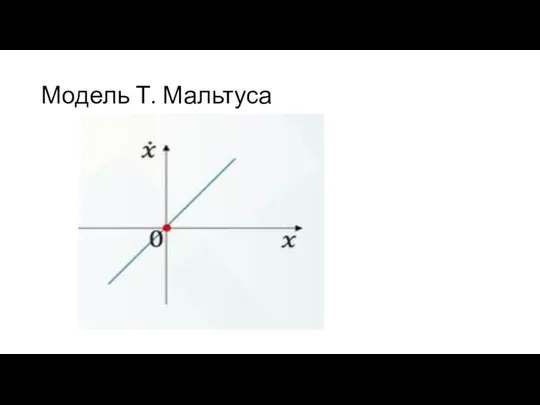
- 24. Модель Т. Мальтуса
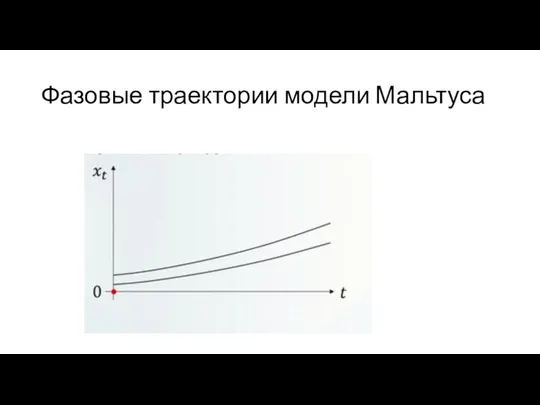
- 25. Фазовые траектории модели Мальтуса
- 26. Выводы: Во-первых, неограниченное потребление ресурса приводит к неограниченному производству продукта. В реальной ситуации этого конечно же
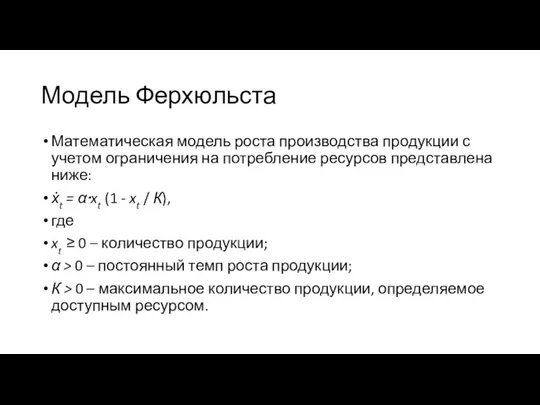
- 27. Модель Ферхюльста Математическая модель роста производства продукции с учетом ограничения на потребление ресурсов представлена ниже: ẋt
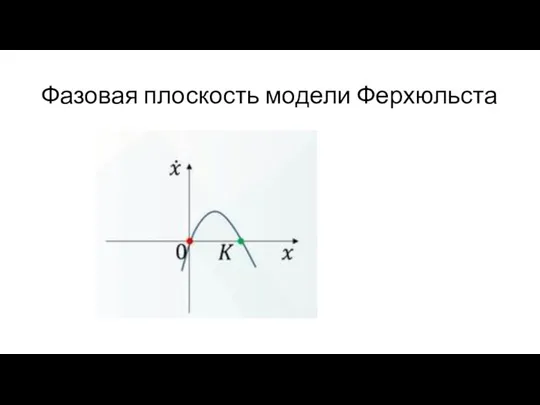
- 28. Фазовая плоскость модели Ферхюльста
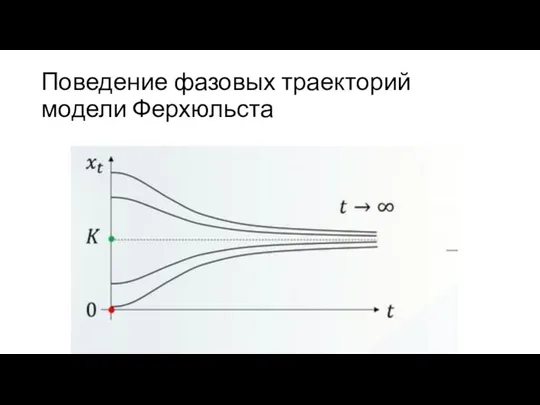
- 29. Поведение фазовых траекторий модели Ферхюльста
- 31. Скачать презентацию
Слайд 2ДС
Под динамической системой понимают любой процесс или объект, для которого характерно:
однозначно определенное
ДС
Под динамической системой понимают любой процесс или объект, для которого характерно:
однозначно определенное
Слайд 4Число степеней свободы – наименьшее число независимых величин (координат), необходимых для однозначного
Число степеней свободы – наименьшее число независимых величин (координат), необходимых для однозначного
Слайд 5Одномерное и двумерное фазовое
пространство
Одномерное и двумерное фазовое
пространство
Слайд 6Фазовая траектория и фазовый портрет
Фазовая траектория и фазовый портрет
Слайд 7Формальное определение динамической системы
фазовое пространство Х, образующее полное метрическое пространство;
множество моментов времени
Формальное определение динамической системы
фазовое пространство Х, образующее полное метрическое пространство;
множество моментов времени
Слайд 8Классификация динамических систем
с непрерывным временем (континуальные системы), т.е. системы, которые задаются дифференциальными
Классификация динамических систем
с непрерывным временем (континуальные системы), т.е. системы, которые задаются дифференциальными
Слайд 9Классификация динамических систем
- нелинейные:
Et (x + x') ≠ Et (x) + Et
Классификация динамических систем
- нелинейные:
Et (x + x') ≠ Et (x) + Et
Слайд 10Классификация динамических систем
детерминированные – это все рассмотренные выше системы, когда нет шумов,
Классификация динамических систем
детерминированные – это все рассмотренные выше системы, когда нет шумов,
Слайд 11Устойчивость решения динамических систем
Устойчивость по Ляпунову. Решение динамической системы устойчиво по Ляпунову,
Устойчивость решения динамических систем
Устойчивость по Ляпунову. Решение динамической системы устойчиво по Ляпунову,
Слайд 12Устойчивость решения динамических систем
Асимптотическая устойчивость. Если решение динамической системы устойчиво не только
Устойчивость решения динамических систем
Асимптотическая устойчивость. Если решение динамической системы устойчиво не только
Слайд 13Устойчивость решения динамических систем
Экспоненциальная устойчивость. Если решение динамической системы устойчиво не только
Устойчивость решения динамических систем
Экспоненциальная устойчивость. Если решение динамической системы устойчиво не только
Слайд 14Одномерные динамические системы
Одномерные динамические системы – это динамические системы на прямой или
Одномерные динамические системы
Одномерные динамические системы – это динамические системы на прямой или
Слайд 151. Аналитический подход решения задачи Коши
Формулировка задачи Коши: известен закон эволюции и
1. Аналитический подход решения задачи Коши
Формулировка задачи Коши: известен закон эволюции и
Слайд 162. Численное решение задачи Коши
это численный эксперимент, применение численных методов. Однако не
2. Численное решение задачи Коши
это численный эксперимент, применение численных методов. Однако не
Слайд 173. Качественный анализ или метод фазовых траекторий
Позволяет по заданному закону эволюции получить
3. Качественный анализ или метод фазовых траекторий
Позволяет по заданному закону эволюции получить
Слайд 18Качественный анализ динамических систем
Задача Коши в рамках качественного анализа формулируется следующим образом.
Входные
Качественный анализ динамических систем
Задача Коши в рамках качественного анализа формулируется следующим образом.
Входные
Слайд 19Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 1. Решить уравнение F (xt)
Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 1. Решить уравнение F (xt)
Слайд 20Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 2. Изобразить фазовую траекторию
Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 2. Изобразить фазовую траекторию
Слайд 21Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 3. Классифицировать стационарные точки,
Алгоритм анализа одномерных динамических систем ẋt = F (xt)
Шаг 3. Классифицировать стационарные точки,
Слайд 22Поведение решений динамической системы вблизи аттрактора и репеллеров
Поведение решений динамической системы вблизи аттрактора и репеллеров
Слайд 23Модель Т. Мальтуса
Т. Мальтус – известный демограф, экономист. Он показал в своем
Модель Т. Мальтуса
Т. Мальтус – известный демограф, экономист. Он показал в своем
Слайд 24Модель Т. Мальтуса
Модель Т. Мальтуса
Слайд 25Фазовые траектории модели Мальтуса
Фазовые траектории модели Мальтуса
Слайд 26Выводы:
Во-первых, неограниченное потребление ресурса приводит к неограниченному производству продукта. В реальной ситуации
Выводы:
Во-первых, неограниченное потребление ресурса приводит к неограниченному производству продукта. В реальной ситуации
Слайд 27Модель Ферхюльста
Математическая модель роста производства продукции с учетом ограничения на потребление ресурсов
Модель Ферхюльста
Математическая модель роста производства продукции с учетом ограничения на потребление ресурсов
Слайд 28Фазовая плоскость модели Ферхюльста
Фазовая плоскость модели Ферхюльста
Слайд 29Поведение фазовых траекторий модели Ферхюльста
Поведение фазовых траекторий модели Ферхюльста
 1_urok_ponyatie_vektora
1_urok_ponyatie_vektora арифметический корень (1)
арифметический корень (1) Логика, делимость. Задание №15
Логика, делимость. Задание №15 Производная функции
Производная функции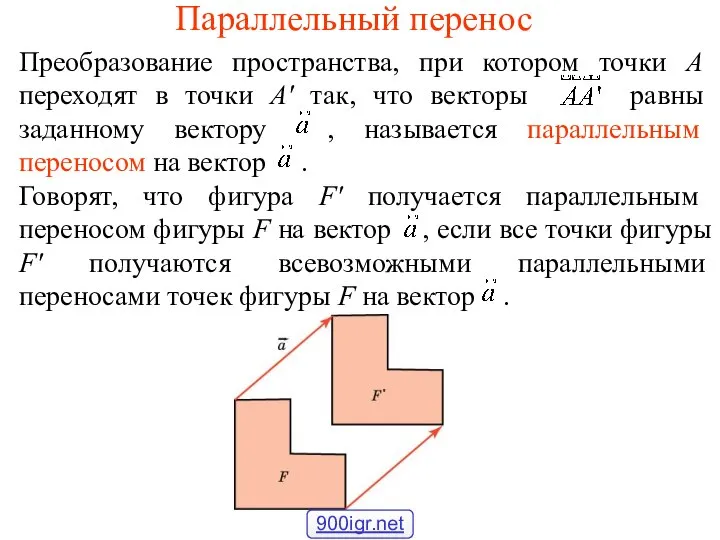 Параллельный перенос
Параллельный перенос Параллельные прямые
Параллельные прямые Математическая цепочка
Математическая цепочка Презентация на тему Конус. Сечение конуса плоскостями
Презентация на тему Конус. Сечение конуса плоскостями  Методические рекомендации по изложению темы Площади плоских фигур по геометрии в 7 - 9 классах
Методические рекомендации по изложению темы Площади плоских фигур по геометрии в 7 - 9 классах Смешанные числа (часть 2)
Смешанные числа (часть 2) Лекция №5. Основные понятия теории вероятностей и математической статистики
Лекция №5. Основные понятия теории вероятностей и математической статистики Прибавить и вычесть 4
Прибавить и вычесть 4 Презентация на тему Перпендикулярность прямой и плоскости
Презентация на тему Перпендикулярность прямой и плоскости  Презентация на тему Нумерация в пределах 1000
Презентация на тему Нумерация в пределах 1000  Расстояние между точками
Расстояние между точками Знаки: >(больше), <(меньше), =(равно)
Знаки: >(больше), <(меньше), =(равно) Архимед в XXI веке
Архимед в XXI веке Презентация на тему ГИА 2013. Модуль «Алгебра» №1
Презентация на тему ГИА 2013. Модуль «Алгебра» №1  Формула Бернулли
Формула Бернулли Статистика знает всё
Статистика знает всё Мой кабинет – моя лаборатория Презентацию подготовила заведующая школьным кабинетом математики №14 Ларионова Татьяна Ивановна.
Мой кабинет – моя лаборатория Презентацию подготовила заведующая школьным кабинетом математики №14 Ларионова Татьяна Ивановна. Правильные многоугольники
Правильные многоугольники Арифметический диктант
Арифметический диктант Знаки +, -, =. Прибавить, вычесть, получится
Знаки +, -, =. Прибавить, вычесть, получится Вычисления с многозначными числами
Вычисления с многозначными числами Плоскость и прямая в пространстве
Плоскость и прямая в пространстве Арккосинус. Решение уравнения cosx=a
Арккосинус. Решение уравнения cosx=a Неопределённый интеграл
Неопределённый интеграл