Slaidy.com
Алгебра
Английский язык
Астрономия
Биология
География
Геометрия
Информатика
История
Литература
Математика
Медицина
Музыка
МХК
ОБЖ
Обществознание
Педагогика
Немецкий язык
Русский язык
Технология
Физика
Философия
Химия
Экология
Экономика
Детские презентации
Шаблоны презентаций
Разное
Культурология
Окружающий мир
Задача 3. Построить матрицу поворота
Март 10, 2021
Главная
Математика
Задача 3. Построить матрицу поворота
Содержание
2.
Скачать презентацию
Имя файла: Задача-3.-Построить-матрицу-поворота.pptx
Количество просмотров: 141
Количество скачиваний: 0
Скачать
- Предыдущая
Основы экологии и экоразвития
Следующая -
Гидрология. Физические основы гидрологических процессов
Похожие презентации
Презентация по математике "Сложение и вычитание в пределах 1000" -
Построение графиков функций с помощью геометрических преобразований
Числовые и буквенные выражения
Углы. Тест
Координатная плоскость
Презентация+ТВ+Законы+распределения
Понятие вектора. Векторы на плоскости
Првильные многоугольники
Перпендикулярные прямые
Решение задач на применение признаков равенства треугольников
Ладога в цифрах
Система пропорционирования в проектировании объектов дизайна
Логические задачи. Мастер-класс
Тақырып 2. Нарық ортасында кәсіпорынның инвестициялық іс-қимылы
Алгоритмы. Понятие и свойства алгоритмов
Тригонометрические формулы суммы и разности углов
Деление дробей. Путешествие в Китай
Матрицы и действия над ними
Свойства решений уравнения Левнера
Понятие о задачах математической статистики
Эмпирические работы. Причинность по Гренджеру
Центральные и вписанные углы. Решение задач
Подібність трикутників
Призма. Построение сечений призмы плоскостями
Геометрия Евклида
Правило параллелепипеда
Тригонометрические функции
Задачи по геометрии

 Презентация по математике "Сложение и вычитание в пределах 1000" -
Презентация по математике "Сложение и вычитание в пределах 1000" -  Построение графиков функций с помощью геометрических преобразований
Построение графиков функций с помощью геометрических преобразований Числовые и буквенные выражения
Числовые и буквенные выражения Углы. Тест
Углы. Тест Координатная плоскость
Координатная плоскость Презентация+ТВ+Законы+распределения
Презентация+ТВ+Законы+распределения Понятие вектора. Векторы на плоскости
Понятие вектора. Векторы на плоскости Првильные многоугольники
Првильные многоугольники Перпендикулярные прямые
Перпендикулярные прямые Решение задач на применение признаков равенства треугольников
Решение задач на применение признаков равенства треугольников Ладога в цифрах
Ладога в цифрах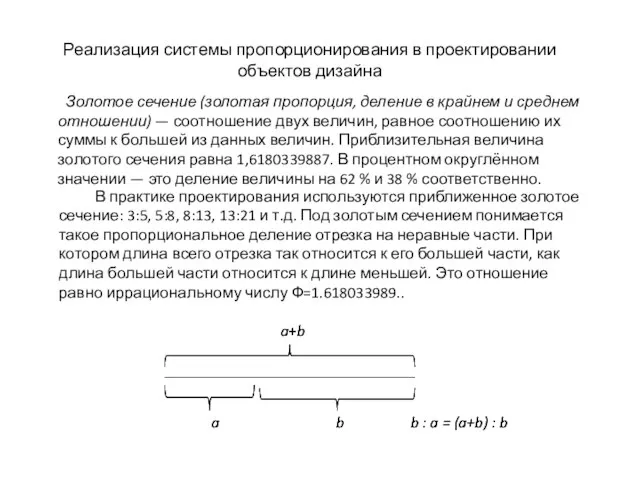 Система пропорционирования в проектировании объектов дизайна
Система пропорционирования в проектировании объектов дизайна Логические задачи. Мастер-класс
Логические задачи. Мастер-класс Тақырып 2. Нарық ортасында кәсіпорынның инвестициялық іс-қимылы
Тақырып 2. Нарық ортасында кәсіпорынның инвестициялық іс-қимылы Алгоритмы. Понятие и свойства алгоритмов
Алгоритмы. Понятие и свойства алгоритмов Тригонометрические формулы суммы и разности углов
Тригонометрические формулы суммы и разности углов Деление дробей. Путешествие в Китай
Деление дробей. Путешествие в Китай Матрицы и действия над ними
Матрицы и действия над ними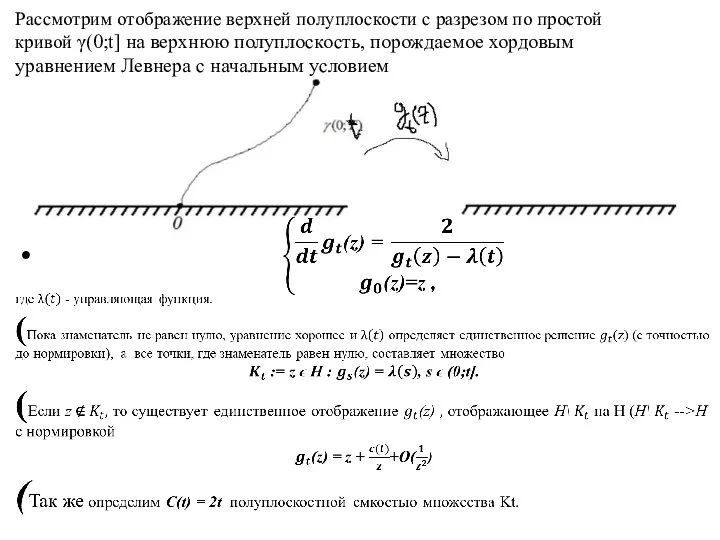 Свойства решений уравнения Левнера
Свойства решений уравнения Левнера Понятие о задачах математической статистики
Понятие о задачах математической статистики Эмпирические работы. Причинность по Гренджеру
Эмпирические работы. Причинность по Гренджеру Центральные и вписанные углы. Решение задач
Центральные и вписанные углы. Решение задач Подібність трикутників
Подібність трикутників Призма. Построение сечений призмы плоскостями
Призма. Построение сечений призмы плоскостями Геометрия Евклида
Геометрия Евклида Правило параллелепипеда
Правило параллелепипеда Тригонометрические функции
Тригонометрические функции Задачи по геометрии
Задачи по геометрии