- Латоша_презентація

Содержание
- 2. Актуальність роботи Дорожньо-транспортні пригоди є однією з найпоширеніших причин смерті в усьому світі, і щорічно 1,25
- 3. Аналіз світового ринку щодо навігацій руху Світовий ринок навігації (обладнання та послуги) станом на 2014 р.
- 4. Огляд методів аналізу пішохідного руху Дії людини можна представити за допомогою різних візуальних методів, а саме:
- 5. Огляд методів аналізу пішохідного руху Є рішення це комплексне використання методів. Наприклад, RGB+D. Тепер питання полягає
- 6. Дії, траєкторія руху людей Рисунок 5 – Траєкторії суглобів скелета при ходьбі Поза, Р, є n
- 7. Прогнозування траєкторії руху Рисунок 6 – Прогнозування наміру пішохідного переходу на основі CNN та RNN
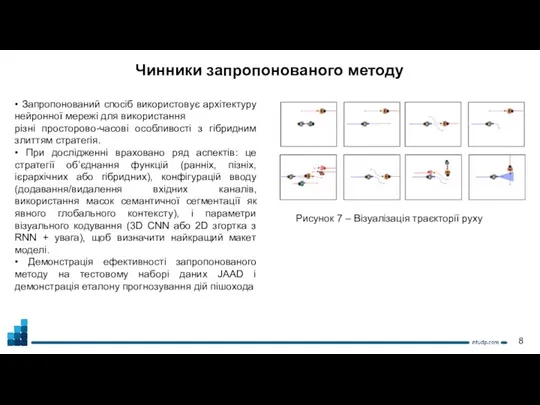
- 8. Чинники запропонованого методу • Запропонований спосіб використовує архітектуру нейронної мережі для використання різні просторово-часові особливості з
- 9. Тестові набори даних Рисунок 8 – Тестові дані Експерименти проводились на тестових наборах даних JAAD.
- 10. Експерименти Рисунок 9 – Результат прогнозування Ми порівняли запропонований метод з моделлю PCPA.
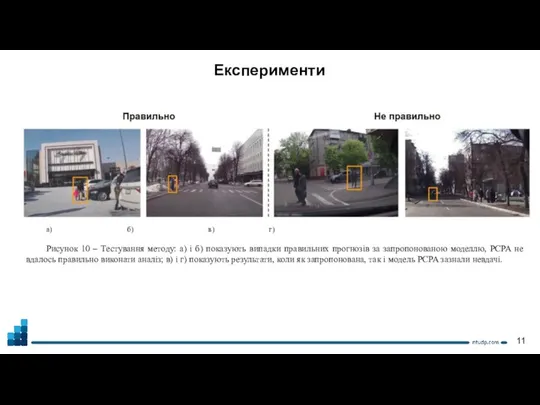
- 11. Експерименти а) б) в) г) Рисунок 10 – Тестування методу: a) і б) показують випадки правильних
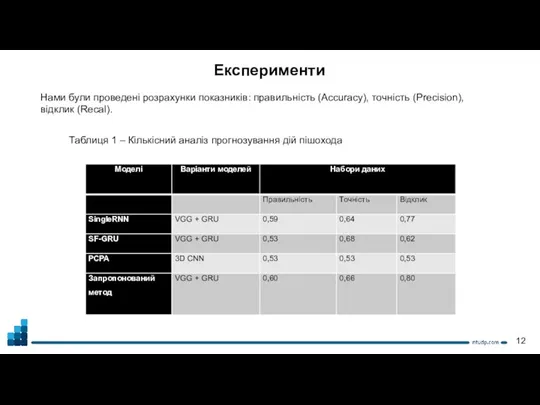
- 12. Експерименти Нами були проведені розрахунки показників: правильність (Accuracy), точність (Precision), відклик (Recal). Таблиця 1 – Кількісний
- 13. Висновки Провели аналіз світового ринку щодо використання систем навігацій. Провели аналіз існуючих методів прогнозування рухів пішоходів.
- 15. Скачать презентацию
Слайд 2Актуальність роботи
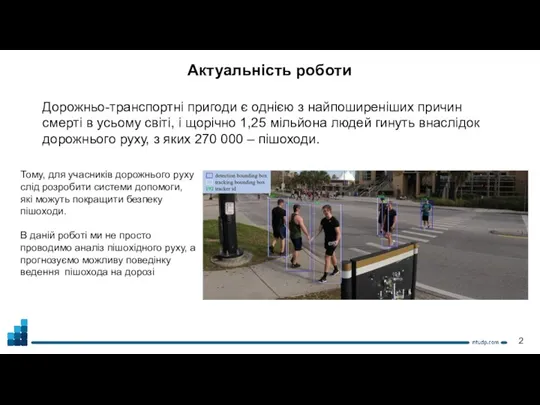
Дорожньо-транспортні пригоди є однією з найпоширеніших причин смерті в усьому світі,
Актуальність роботи
Дорожньо-транспортні пригоди є однією з найпоширеніших причин смерті в усьому світі,
Слайд 3Аналіз світового ринку щодо навігацій руху
Світовий ринок навігації (обладнання та послуги)
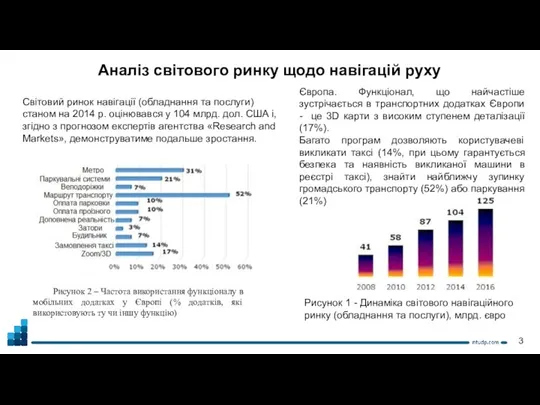
Аналіз світового ринку щодо навігацій руху
Світовий ринок навігації (обладнання та послуги)
Слайд 4Огляд методів аналізу пішохідного руху
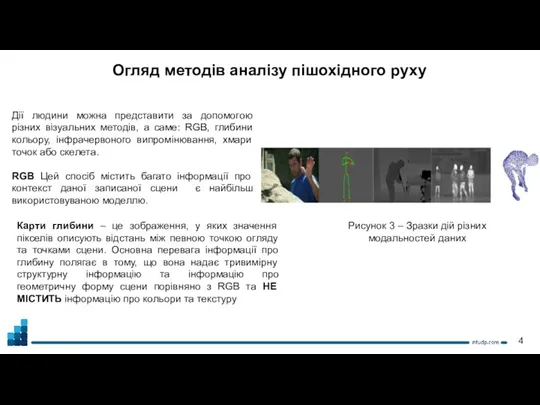
Дії людини можна представити за допомогою різних
Огляд методів аналізу пішохідного руху
Дії людини можна представити за допомогою різних
Слайд 5Огляд методів аналізу пішохідного руху
Є рішення це комплексне використання методів. Наприклад,
Огляд методів аналізу пішохідного руху
Є рішення це комплексне використання методів. Наприклад,

Слайд 6Дії, траєкторія руху людей
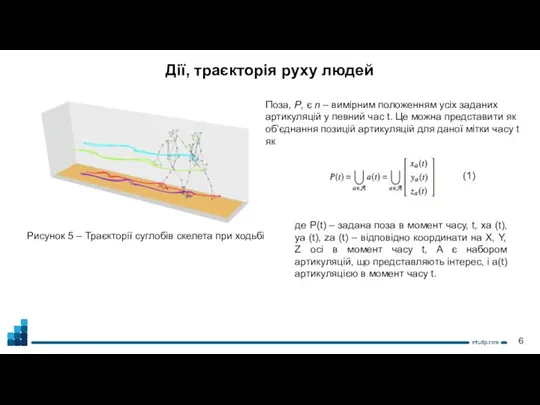
Рисунок 5 – Траєкторії суглобів скелета при ходьбі
Поза, Р,
Дії, траєкторія руху людей
Рисунок 5 – Траєкторії суглобів скелета при ходьбі
Поза, Р,
Слайд 7Прогнозування траєкторії руху
Рисунок 6 – Прогнозування наміру пішохідного переходу на основі CNN
Прогнозування траєкторії руху
Рисунок 6 – Прогнозування наміру пішохідного переходу на основі CNN

Слайд 8Чинники запропонованого методу
• Запропонований спосіб використовує архітектуру нейронної мережі для використання
різні просторово-часові
Чинники запропонованого методу
• Запропонований спосіб використовує архітектуру нейронної мережі для використання
різні просторово-часові
Слайд 9Тестові набори даних
Рисунок 8 – Тестові дані
Експерименти проводились на тестових наборах даних
Тестові набори даних
Рисунок 8 – Тестові дані
Експерименти проводились на тестових наборах даних

Слайд 10Експерименти
Рисунок 9 – Результат прогнозування
Ми порівняли запропонований метод з моделлю PCPA.
Експерименти
Рисунок 9 – Результат прогнозування
Ми порівняли запропонований метод з моделлю PCPA.

Слайд 11Експерименти
а) б) в) г)
Рисунок 10 – Тестування методу: a) і б) показують випадки правильних прогнозів
Експерименти
а) б) в) г)
Рисунок 10 – Тестування методу: a) і б) показують випадки правильних прогнозів
Слайд 12Експерименти
Нами були проведені розрахунки показників: правильність (Accuracy), точність (Precision), відклик (Recal).
Експерименти
Нами були проведені розрахунки показників: правильність (Accuracy), точність (Precision), відклик (Recal).
Слайд 13Висновки
Провели аналіз світового ринку щодо використання систем навігацій.
Провели аналіз існуючих методів прогнозування
Висновки
Провели аналіз світового ринку щодо використання систем навігацій.
Провели аналіз існуючих методів прогнозування
 Организация детского самоуправления
Организация детского самоуправления Энергетическое машиностроение: возможности России
Энергетическое машиностроение: возможности России Компьютерные вирусы
Компьютерные вирусы Развитие образования, науки и техники в первой четверти XVIII века
Развитие образования, науки и техники в первой четверти XVIII века УПРАВЛЕНИЕ ИЗДЕРЖКАМИ, АНАЛИЗ БЕЗУБЫТОЧНОСТИ
УПРАВЛЕНИЕ ИЗДЕРЖКАМИ, АНАЛИЗ БЕЗУБЫТОЧНОСТИ Какие праздники вы любите?
Какие праздники вы любите? Фундаментальное ядро содержания общего образования
Фундаментальное ядро содержания общего образования ОЦЕНКА ВЛИЯНИЯ ИЗМЕНЕНИЯ КЛИМАТА НАЭКОЛОГО-ЭКОНОМИЧЕСКУЮ СИСТЕМУ МОНГОЛИИ
ОЦЕНКА ВЛИЯНИЯ ИЗМЕНЕНИЯ КЛИМАТА НАЭКОЛОГО-ЭКОНОМИЧЕСКУЮ СИСТЕМУ МОНГОЛИИ Формы культуры
Формы культуры Легенда о Змеиной горе
Легенда о Змеиной горе Разработка интернет-магазина женской одежды
Разработка интернет-магазина женской одежды MarcomOVDR Orp-Jauche 27,28,29,30,38,39,40,41,47,48
MarcomOVDR Orp-Jauche 27,28,29,30,38,39,40,41,47,48 2.Istoricheskieigeograficheskietipiprirodopolzovaniya
2.Istoricheskieigeograficheskietipiprirodopolzovaniya Перевод чисел из десятичной системы счисления в двоичную, восьмеричную и шестнадцатеричную
Перевод чисел из десятичной системы счисления в двоичную, восьмеричную и шестнадцатеричную Лекция 3
Лекция 3 Презентация на тему Ландшафтный дизайн
Презентация на тему Ландшафтный дизайн В царстве разделительных знаков
В царстве разделительных знаков Геометрический орнамент
Геометрический орнамент Школа-театр Мэри Поппинс
Школа-театр Мэри Поппинс 70 лет битве под Москвой
70 лет битве под Москвой Безопасность жизнедеятельности. Ответственность за несоблюдение законодательства по охране труда
Безопасность жизнедеятельности. Ответственность за несоблюдение законодательства по охране труда Рак почки. Эпидемиология, классификация, этиология, патогенез, клиническая картина
Рак почки. Эпидемиология, классификация, этиология, патогенез, клиническая картина Що спільного
Що спільного Биография и творчество Лагина Лазаря Иосифовича
Биография и творчество Лагина Лазаря Иосифовича Che tempo fa?
Che tempo fa? Совет Федерации Федерального Собрания Российской Федерации
Совет Федерации Федерального Собрания Российской Федерации МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ
МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ Алгоритмы. Способы представления алгоритмов
Алгоритмы. Способы представления алгоритмов