- Методология взаимодействия для выравнивания виртуального с реальным

Содержание
- 2. Содержание Постановка проблемы позиционирования Исследование актуальности и нахождение решения Анализ нового решения позиционирования (а) теоретическая часть
- 3. Роботоассистированная хирургия Позиционирование с помощью лазерного наведения
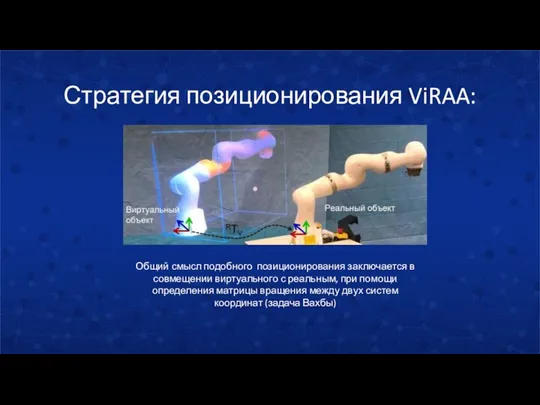
- 4. Стратегия позиционирования ViRAA: Общий смысл подобного позиционирования заключается в совмещении виртуального с реальным, при помощи определения
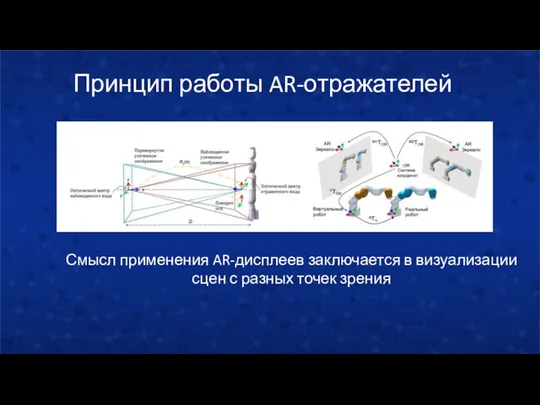
- 5. Принцип работы AR-отражателей Смысл применения AR-дисплеев заключается в визуализации сцен с разных точек зрения
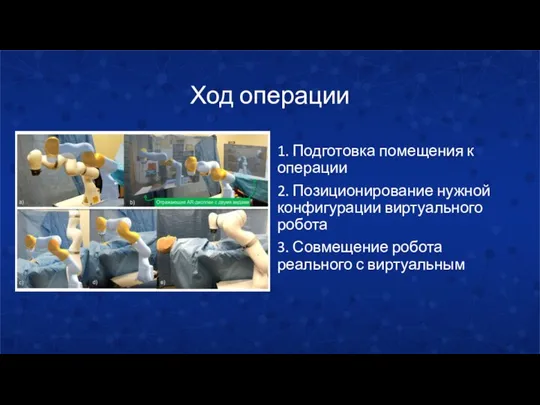
- 6. Ход операции 1. Подготовка помещения к операции 2. Позиционирование нужной конфигурации виртуального робота 3. Совмещение робота
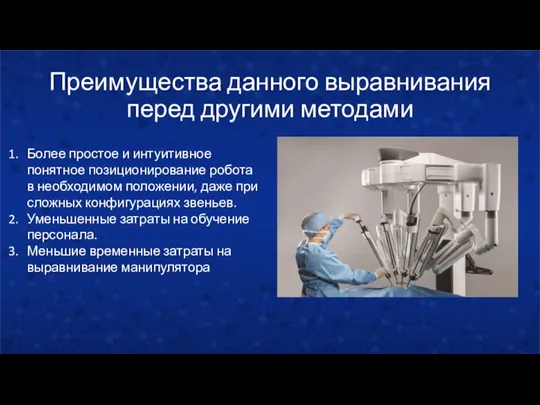
- 7. Преимущества данного выравнивания перед другими методами Более простое и интуитивное понятное позиционирование робота в необходимом положении,
- 8. Необходимое оборудование Очки дополненной реальности Робот манипулятор KUKA
- 9. Заключение
- 11. Скачать презентацию
Слайд 2Содержание
Постановка проблемы позиционирования
Исследование актуальности и нахождение решения
Анализ нового решения позиционирования
(а)
Содержание
Постановка проблемы позиционирования
Исследование актуальности и нахождение решения
Анализ нового решения позиционирования
(а)
Слайд 3Роботоассистированная хирургия
Позиционирование с помощью лазерного наведения
Роботоассистированная хирургия
Позиционирование с помощью лазерного наведения

Слайд 4Стратегия позиционирования ViRAA:
Общий смысл подобного позиционирования заключается в совмещении виртуального с реальным,
Стратегия позиционирования ViRAA:
Общий смысл подобного позиционирования заключается в совмещении виртуального с реальным,
Слайд 5Принцип работы AR-отражателей
Смысл применения AR-дисплеев заключается в визуализации сцен с разных точек
Принцип работы AR-отражателей
Смысл применения AR-дисплеев заключается в визуализации сцен с разных точек
Слайд 6Ход операции
1. Подготовка помещения к операции
2. Позиционирование нужной конфигурации виртуального робота
3. Совмещение
Ход операции
1. Подготовка помещения к операции
2. Позиционирование нужной конфигурации виртуального робота
3. Совмещение
Слайд 7Преимущества данного выравнивания перед другими методами
Более простое и интуитивное понятное позиционирование робота
Преимущества данного выравнивания перед другими методами
Более простое и интуитивное понятное позиционирование робота
Слайд 8Необходимое оборудование
Очки дополненной реальности
Робот манипулятор KUKA
Необходимое оборудование
Очки дополненной реальности
Робот манипулятор KUKA
Слайд 9Заключение
Заключение
 powerpoint_day_10_powerpoint_challenge_-_copy_0
powerpoint_day_10_powerpoint_challenge_-_copy_0 Образы крестьян в картинах русских художников
Образы крестьян в картинах русских художников Оборонительные сооружения Кёнигсберга
Оборонительные сооружения Кёнигсберга 20171224_muzykalnyy_geograficheskiy_kaleydoskop
20171224_muzykalnyy_geograficheskiy_kaleydoskop программа развития гоу цо № 1444
программа развития гоу цо № 1444 ОГП тема 3
ОГП тема 3 Графический дизайн
Графический дизайн О безопасности сельскохозяйственных и лесохозяйственных тракторов и прицепов к ним
О безопасности сельскохозяйственных и лесохозяйственных тракторов и прицепов к ним Marathon Technologies
Marathon Technologies Уолт Дисней
Уолт Дисней Холокост
Холокост Совершенствование эксплуатации МПП с модернизацией пропашного культиватора
Совершенствование эксплуатации МПП с модернизацией пропашного культиватора Курочка Ряба
Курочка Ряба Я - гражданин России. Кудрявцев Александр
Я - гражданин России. Кудрявцев Александр Исследовательская деятельность на уроках русского языка и литературы как важнейшее условие раскрытия внутреннего потенциала обу
Исследовательская деятельность на уроках русского языка и литературы как важнейшее условие раскрытия внутреннего потенциала обу Рынок труда
Рынок труда Герой нашего времени история создания
Герой нашего времени история создания Заседание комитета по ЖКХ
Заседание комитета по ЖКХ Решение задач Итоговое занятие 5 класс
Решение задач Итоговое занятие 5 класс Современные подходы в работе с семьей
Современные подходы в работе с семьей Правила выполнения рабочей документации автоматизации технологических процессов
Правила выполнения рабочей документации автоматизации технологических процессов Андрей Платонович Платонов
Андрей Платонович Платонов Влияние компьютера на организм человека
Влияние компьютера на организм человека Rol_oporno-dvigatelnogo_apparata_v_vypolnenii_fizicheskikh_uprazhneniy_1
Rol_oporno-dvigatelnogo_apparata_v_vypolnenii_fizicheskikh_uprazhneniy_1 Гіпсова ліпнина, ковані вироби, каміни
Гіпсова ліпнина, ковані вироби, каміни Разработка ассортиментной линейки потребительского гардероба на основе принципов кастомайзинга
Разработка ассортиментной линейки потребительского гардероба на основе принципов кастомайзинга Проблемы в управлении финансами на современных предприятиях и способы их решения
Проблемы в управлении финансами на современных предприятиях и способы их решения Ракутин Сергей UMI.CMS
Ракутин Сергей UMI.CMS