- Слайды_РСО_Т5_Зан_40_гз_Аппаратная_машина_МРПМК

Содержание
- 2. УЧЕБНАЯ ЛИТЕРАТУРА 2 1. Костюков В.И. «Метеорологическое обеспечение ракетных войск и артиллерии»: учебник. – СПб: ВАУ,
- 3. УЧЕБНЫЕ ВОПРОСЫ 3 Назначение, технические характеристики, состав, устройство и работа аппаратной машины. Описание и работа составных
- 4. ПИСЬМЕННЫЙ ОПРОС 4 1 ВАРИАНТ Состав радиопеленгационного комплекса РПМК-1 «Улыбка». Режимы работы РПМК-1. Состав расчета межвидового
- 5. 1 УЧЕБНЫЙ ВОПРОС 5 НАЗНАЧЕНИЕ, ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ, СОСТАВ, УСТРОЙСТВО И РАБОТА АППАРАТНОЙ МАШИНЫ
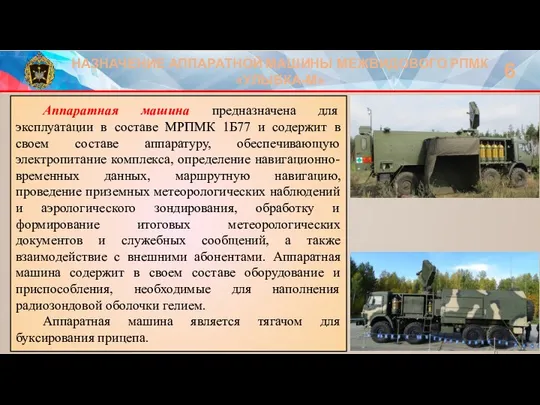
- 6. НАЗНАЧЕНИЕ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 6 Аппаратная машина предназначена для эксплуатации в составе МРПМК 1Б77
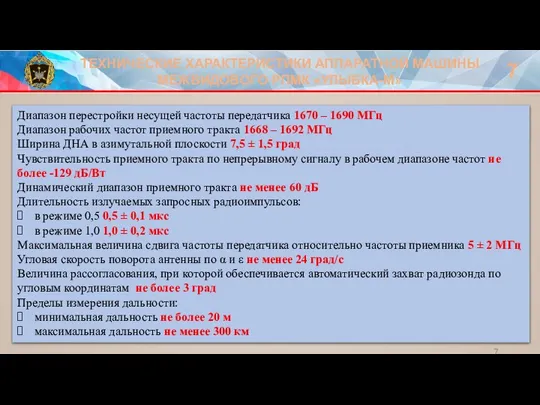
- 7. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 7 Диапазон перестройки несущей частоты передатчика 1670 – 1690
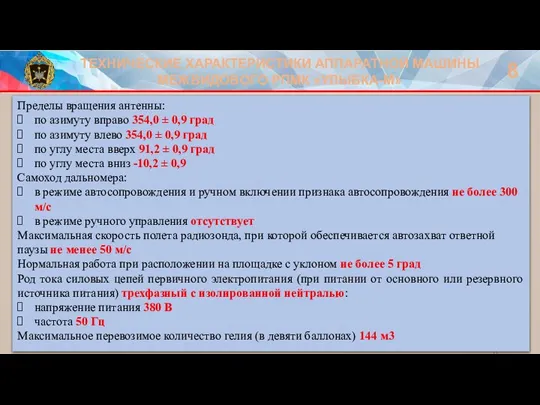
- 8. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 8 Пределы вращения антенны: по азимуту вправо 354,0 ±
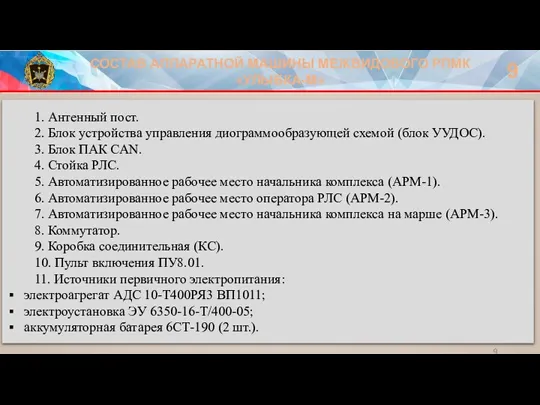
- 9. СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 9 1. Антенный пост. 2. Блок устройства управления диограммообразующей схемой
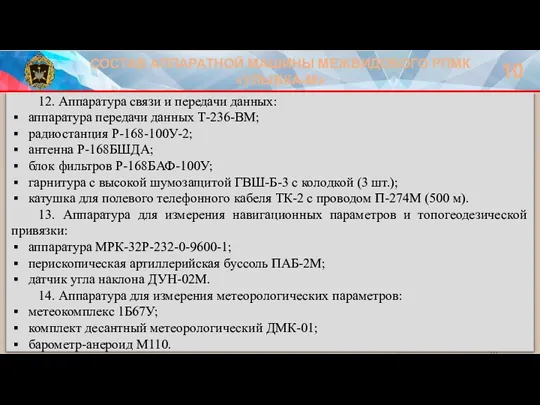
- 10. СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 10 12. Аппаратура связи и передачи данных: аппаратура передачи данных
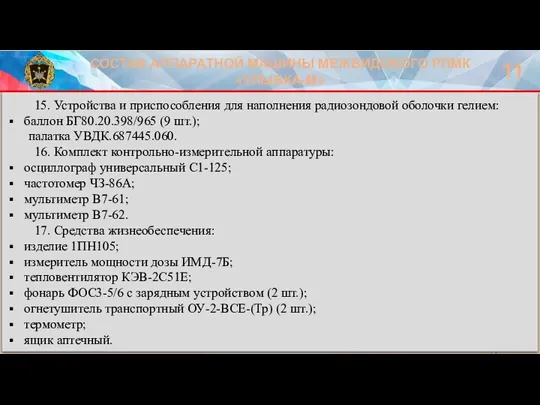
- 11. СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 11 15. Устройства и приспособления для наполнения радиозондовой оболочки гелием:
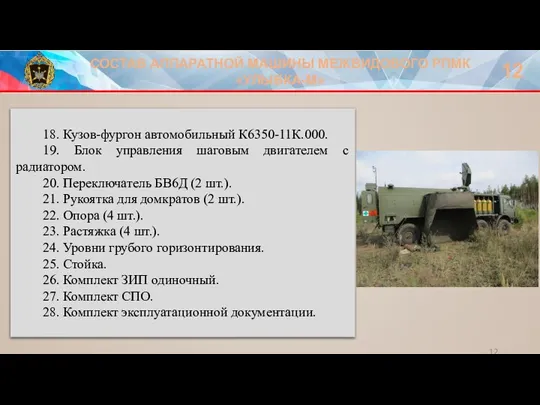
- 12. СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 12 18. Кузов-фургон автомобильный К6350-11К.000. 19. Блок управления шаговым двигателем
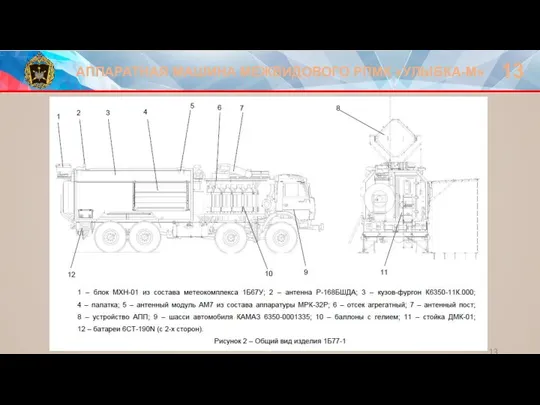
- 13. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 13
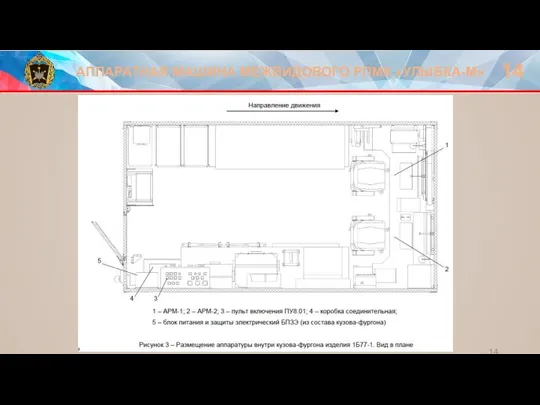
- 14. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 14
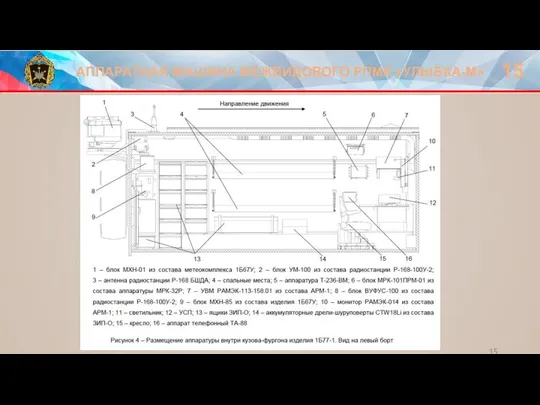
- 15. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 15
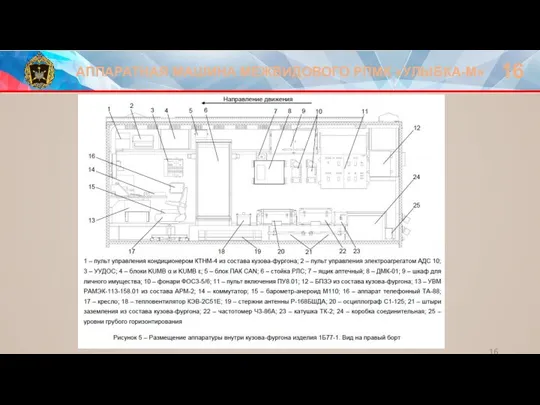
- 16. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 16
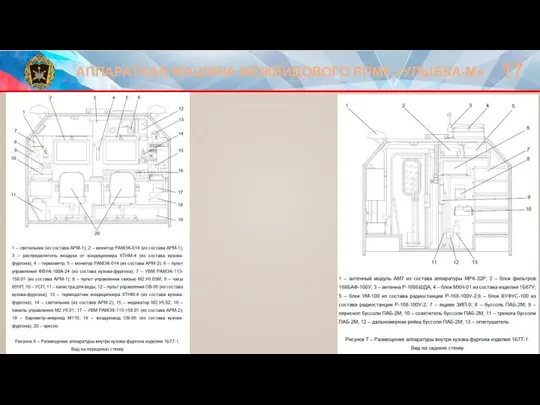
- 17. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 17
- 18. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 18 Основными функциональными системами аппаратной машины являются: передающая система; приемная система;
- 19. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 19 Передающая система предназначена для выработки в радиолокационном режиме зондирования атмосферы
- 20. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 20 Система управления антенной предназначена для: преобразования и выдачи в СПО
- 21. АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М» 21 Система связи и передачи данных обеспечивает возможность обмена телекодовой и/или
- 22. 2 УЧЕБНЫЙ ВОПРОС 22 ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
- 23. АНТЕННЫЙ ПОСТ 23 Антенный пост предназначен для размещения антенно-приемо-передающего устройства с возможностью изменения его пространственного положения.
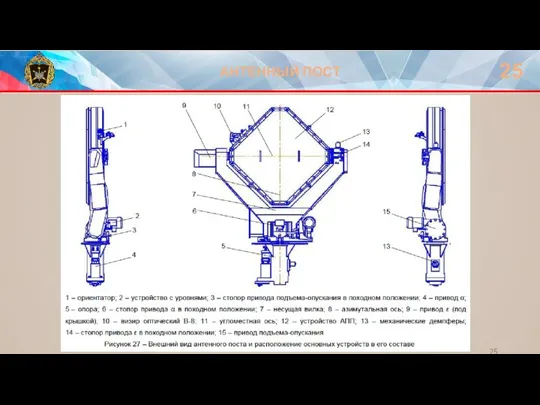
- 24. АНТЕННЫЙ ПОСТ 24 В состав антенного поста входят следующие устройства: антенно-приемо-передающее устройство; привод подъема-опускания; привод α;
- 25. АНТЕННЫЙ ПОСТ 25
- 26. АНТЕННЫЙ ПОСТ 26 Приемопередатчик СВЧ предназначен для решения следующих задач: фильтрации, усиления, преобразования по частоте и
- 27. АНТЕННЫЙ ПОСТ 27 В состав контейнера приемо-передатчика СВЧ входит с следующая аппаратура: субмодуль преобразователя частоты 400
- 28. БЛОК УСТРОЙСТВА УПРАВЛЕНИЯ ДИАГРАММООБРАЗУЮЩЕЙ СХЕМОЙ 28 Блок устройства управления диаграммообразующей схемой предназначен для вращения ДНА путем
- 29. БЛОК ПАК CAN 29 Блок ПАК CAN предназначен для управления азимутальным и/или угломестным приводами антенного поста
- 30. СТОЙКА РЛС 30 Стойка РЛС предназначена для размещения основной аппаратуры аппаратной машины, которая участвует в проведении
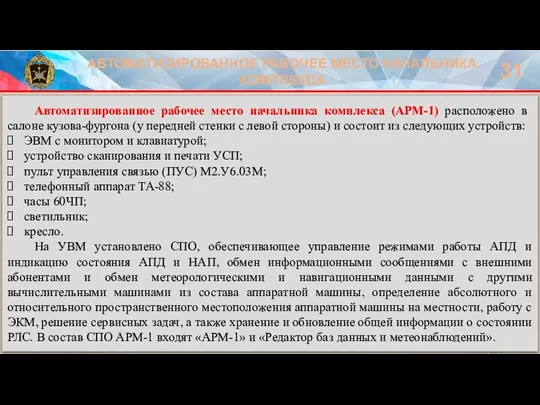
- 31. АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО НАЧАЛЬНИКА КОМПЛЕКСА 31 Автоматизированное рабочее место начальника комплекса (АРМ-1) расположено в салоне кузова-фургона
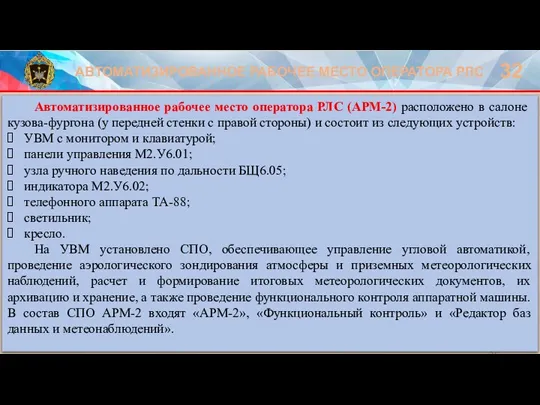
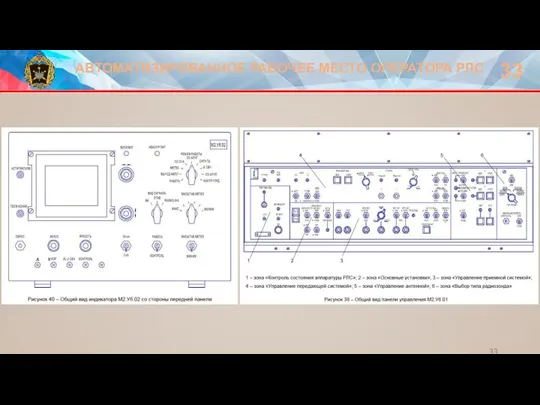
- 32. АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС 32 Автоматизированное рабочее место оператора РЛС (АРМ-2) расположено в салоне кузова-фургона
- 33. АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС 33
- 34. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 34 Автоматизированное рабочее место начальника комплекса на марше (АРМ-3)
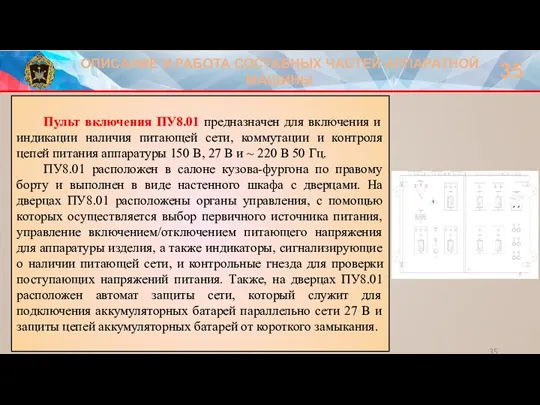
- 35. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 35 Пульт включения ПУ8.01 предназначен для включения и индикации
- 36. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 36 Источники первичного электропитания При размещении комплекса 1Б77 на
- 37. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 37 Аппаратура связи и передачи данных К аппаратуре связи
- 38. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 38 Аппаратура для измерения навигационных параметров и топогеодезической привязки
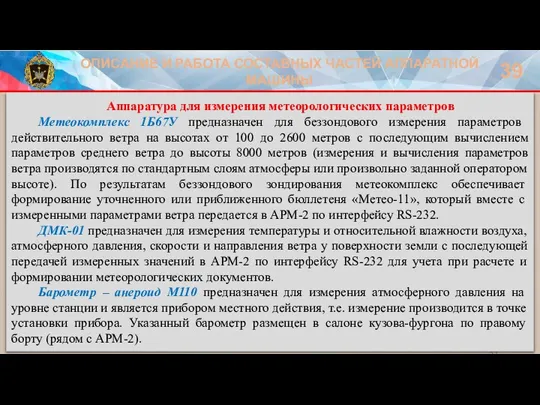
- 39. ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ 39 Аппаратура для измерения метеорологических параметров Метеокомплекс 1Б67У предназначен
- 41. Скачать презентацию
Слайд 2УЧЕБНАЯ ЛИТЕРАТУРА
2
1. Костюков В.И. «Метеорологическое обеспечение ракетных войск и артиллерии»: учебник. –
УЧЕБНАЯ ЛИТЕРАТУРА
2
1. Костюков В.И. «Метеорологическое обеспечение ракетных войск и артиллерии»: учебник. –
Слайд 3УЧЕБНЫЕ ВОПРОСЫ
3
Назначение, технические характеристики, состав, устройство и работа аппаратной машины.
Описание и работа
УЧЕБНЫЕ ВОПРОСЫ
3
Назначение, технические характеристики, состав, устройство и работа аппаратной машины.
Описание и работа
Слайд 4ПИСЬМЕННЫЙ ОПРОС
4
1 ВАРИАНТ
Состав радиопеленгационного комплекса РПМК-1 «Улыбка».
Режимы работы РПМК-1.
Состав расчета межвидового РПМК
ПИСЬМЕННЫЙ ОПРОС
4
1 ВАРИАНТ
Состав радиопеленгационного комплекса РПМК-1 «Улыбка».
Режимы работы РПМК-1.
Состав расчета межвидового РПМК
Слайд 51 УЧЕБНЫЙ ВОПРОС
5
НАЗНАЧЕНИЕ, ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ, СОСТАВ, УСТРОЙСТВО И РАБОТА АППАРАТНОЙ МАШИНЫ
1 УЧЕБНЫЙ ВОПРОС
5
НАЗНАЧЕНИЕ, ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ, СОСТАВ, УСТРОЙСТВО И РАБОТА АППАРАТНОЙ МАШИНЫ
Слайд 6НАЗНАЧЕНИЕ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
6
Аппаратная машина предназначена для эксплуатации в составе
НАЗНАЧЕНИЕ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
6
Аппаратная машина предназначена для эксплуатации в составе
Слайд 7ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
7
Диапазон перестройки несущей частоты передатчика 1670
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
7
Диапазон перестройки несущей частоты передатчика 1670
Слайд 8ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
8
Пределы вращения антенны:
по азимуту вправо 354,0
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
8
Пределы вращения антенны:
по азимуту вправо 354,0
Слайд 9СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
9
1. Антенный пост.
2. Блок устройства управления
СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
9
1. Антенный пост.
2. Блок устройства управления
Слайд 10СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
10
12. Аппаратура связи и передачи данных:
аппаратура передачи
СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
10
12. Аппаратура связи и передачи данных:
аппаратура передачи
Слайд 11СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
11
15. Устройства и приспособления для наполнения радиозондовой
СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
11
15. Устройства и приспособления для наполнения радиозондовой
Слайд 12СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
12
18. Кузов-фургон автомобильный К6350-11К.000.
19. Блок управления шаговым
СОСТАВ АППАРАТНОЙ МАШИНЫ МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
12
18. Кузов-фургон автомобильный К6350-11К.000.
19. Блок управления шаговым
Слайд 13АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
13
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
13
Слайд 14АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
14
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
14
Слайд 15АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
15
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
15
Слайд 16АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
16
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
16
Слайд 17АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
17
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
17
Слайд 18АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
18
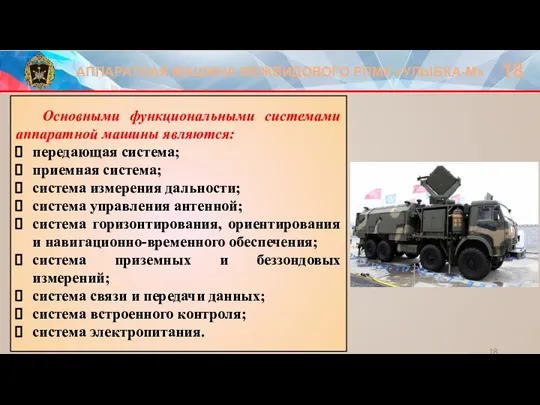
Основными функциональными системами аппаратной машины являются:
передающая система;
приемная система;
система
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
18
Основными функциональными системами аппаратной машины являются:
передающая система;
приемная система;
система
Слайд 19АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
19
Передающая система предназначена для выработки в радиолокационном режиме
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
19
Передающая система предназначена для выработки в радиолокационном режиме
Слайд 20АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
20
Система управления антенной предназначена для:
преобразования и выдачи в
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
20
Система управления антенной предназначена для:
преобразования и выдачи в
Слайд 21АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
21
Система связи и передачи данных обеспечивает возможность обмена
АППАРАТНАЯ МАШИНА МЕЖВИДОВОГО РПМК «УЛЫБКА-М»
21
Система связи и передачи данных обеспечивает возможность обмена
Слайд 222 УЧЕБНЫЙ ВОПРОС
22
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
2 УЧЕБНЫЙ ВОПРОС
22
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
Слайд 23АНТЕННЫЙ ПОСТ
23
Антенный пост предназначен для размещения антенно-приемо-передающего устройства с возможностью изменения его
АНТЕННЫЙ ПОСТ
23
Антенный пост предназначен для размещения антенно-приемо-передающего устройства с возможностью изменения его
Слайд 24АНТЕННЫЙ ПОСТ
24
В состав антенного поста входят следующие устройства:
антенно-приемо-передающее устройство;
привод подъема-опускания;
привод α;
привод ε;
концевые
АНТЕННЫЙ ПОСТ
24
В состав антенного поста входят следующие устройства:
антенно-приемо-передающее устройство;
привод подъема-опускания;
привод α;
привод ε;
концевые
Слайд 25АНТЕННЫЙ ПОСТ
25
АНТЕННЫЙ ПОСТ
25
Слайд 26АНТЕННЫЙ ПОСТ
26
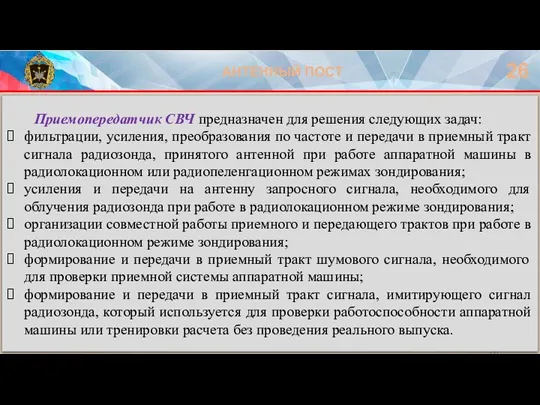
Приемопередатчик СВЧ предназначен для решения следующих задач:
фильтрации, усиления, преобразования по частоте
АНТЕННЫЙ ПОСТ
26
Приемопередатчик СВЧ предназначен для решения следующих задач:
фильтрации, усиления, преобразования по частоте
Слайд 27АНТЕННЫЙ ПОСТ
27
В состав контейнера приемо-передатчика СВЧ входит с следующая аппаратура:
субмодуль преобразователя частоты
АНТЕННЫЙ ПОСТ
27
В состав контейнера приемо-передатчика СВЧ входит с следующая аппаратура:
субмодуль преобразователя частоты

Слайд 28БЛОК УСТРОЙСТВА УПРАВЛЕНИЯ ДИАГРАММООБРАЗУЮЩЕЙ СХЕМОЙ
28
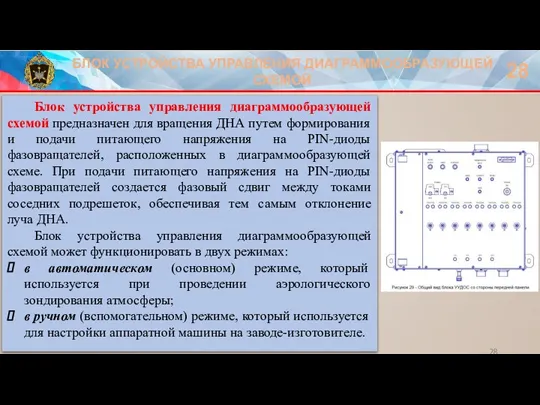
Блок устройства управления диаграммообразующей схемой предназначен для
БЛОК УСТРОЙСТВА УПРАВЛЕНИЯ ДИАГРАММООБРАЗУЮЩЕЙ СХЕМОЙ
28
Блок устройства управления диаграммообразующей схемой предназначен для
Слайд 29БЛОК ПАК CAN
29
Блок ПАК CAN предназначен для управления азимутальным и/или угломестным
БЛОК ПАК CAN
29
Блок ПАК CAN предназначен для управления азимутальным и/или угломестным
Слайд 30СТОЙКА РЛС
30
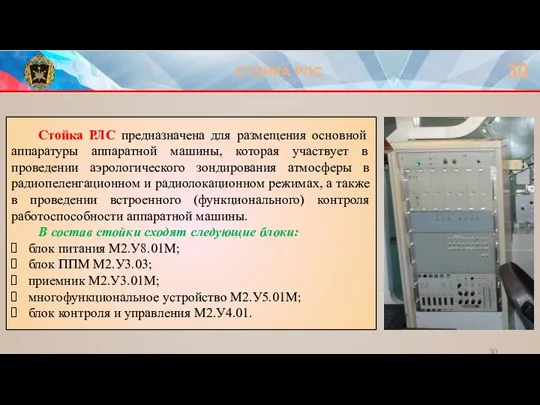
Стойка РЛС предназначена для размещения основной аппаратуры аппаратной машины, которая участвует
СТОЙКА РЛС
30
Стойка РЛС предназначена для размещения основной аппаратуры аппаратной машины, которая участвует
Слайд 31АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО НАЧАЛЬНИКА КОМПЛЕКСА
31
Автоматизированное рабочее место начальника комплекса (АРМ-1) расположено
АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО НАЧАЛЬНИКА КОМПЛЕКСА
31
Автоматизированное рабочее место начальника комплекса (АРМ-1) расположено
Слайд 32АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС
32
Автоматизированное рабочее место оператора РЛС (АРМ-2) расположено в
АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС
32
Автоматизированное рабочее место оператора РЛС (АРМ-2) расположено в
Слайд 33АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС
33
АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА РЛС
33
Слайд 34ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
34
Автоматизированное рабочее место начальника комплекса
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
34
Автоматизированное рабочее место начальника комплекса
Слайд 35ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
35
Пульт включения ПУ8.01 предназначен для
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
35
Пульт включения ПУ8.01 предназначен для
Слайд 36ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
36
Источники первичного электропитания
При размещении комплекса 1Б77
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
36
Источники первичного электропитания
При размещении комплекса 1Б77
Слайд 37ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
37
Аппаратура связи и передачи данных
К аппаратуре
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
37
Аппаратура связи и передачи данных
К аппаратуре
Слайд 38ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
38
Аппаратура для измерения навигационных параметров и
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
38
Аппаратура для измерения навигационных параметров и
Слайд 39ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
39
Аппаратура для измерения метеорологических параметров
Метеокомплекс 1Б67У
ОПИСАНИЕ И РАБОТА СОСТАВНЫХ ЧАСТЕЙ АППАРАТНОЙ МАШИНЫ
39
Аппаратура для измерения метеорологических параметров
Метеокомплекс 1Б67У
 Архитектура Древней Руси 11-13 вв
Архитектура Древней Руси 11-13 вв Презентация на тему Устное народное творчество
Презентация на тему Устное народное творчество  «Вселенная в алфавитном порядке»
«Вселенная в алфавитном порядке» Стресс… ( исцели себя)
Стресс… ( исцели себя)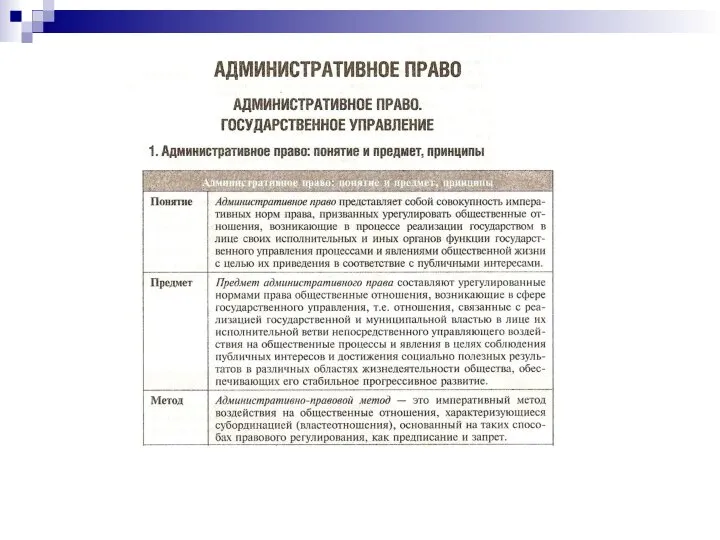 Административное право. (Тема 16)
Административное право. (Тема 16) Русские народные музыкальные инструменты
Русские народные музыкальные инструменты Проект по дисциплине Дизайн в сфере применения
Проект по дисциплине Дизайн в сфере применения مفتش المدارس
مفتش المدارس Говорите по-итальянски
Говорите по-итальянски Презентация на тему Природа Крыма
Презентация на тему Природа Крыма  Русский символизм
Русский символизм Выпускная квалификационная работа: Лимиты водоотведения на основе расчетов предельно допустимого сброса
Выпускная квалификационная работа: Лимиты водоотведения на основе расчетов предельно допустимого сброса Равновесие в классической и кейнсианской модели
Равновесие в классической и кейнсианской модели  Управляющий совет –государственно – общественный орган образования
Управляющий совет –государственно – общественный орган образования Городские общественные пространства
Городские общественные пространства Технологии художественно-прикладной обработки материалов
Технологии художественно-прикладной обработки материалов Руководство по летной эксплуатации вертолета Ми - 8. Расчет полета. Общие указания и исходные данные
Руководство по летной эксплуатации вертолета Ми - 8. Расчет полета. Общие указания и исходные данные Презентация на тему Орфограммы наречий
Презентация на тему Орфограммы наречий Проект «Парк-оберег»в ТСЖ «Север-2000»
Проект «Парк-оберег»в ТСЖ «Север-2000» Герои - односельчане
Герои - односельчане Архитектуры с параллелизмом на уровне команд
Архитектуры с параллелизмом на уровне команд Χωχαρουπα
Χωχαρουπα Организация учебно-научного сотрудничества с высшим учебным заведением
Организация учебно-научного сотрудничества с высшим учебным заведением Откуда на окнах берутся морозные узоры
Откуда на окнах берутся морозные узоры Организация научных исследований в области дошкольного образования
Организация научных исследований в области дошкольного образования Royal family
Royal family Святые земли Вологодской
Святые земли Вологодской Дорожное путешествие в КраеФест
Дорожное путешествие в КраеФест