- Векторный способ задания движения

Содержание
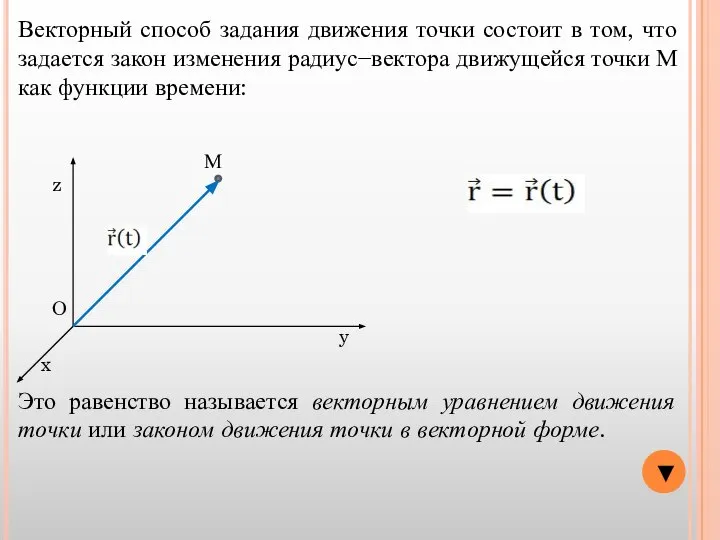
- 2. Векторный способ задания движения точки состоит в том, что задается закон изменения радиус−вектора движущейся точки М
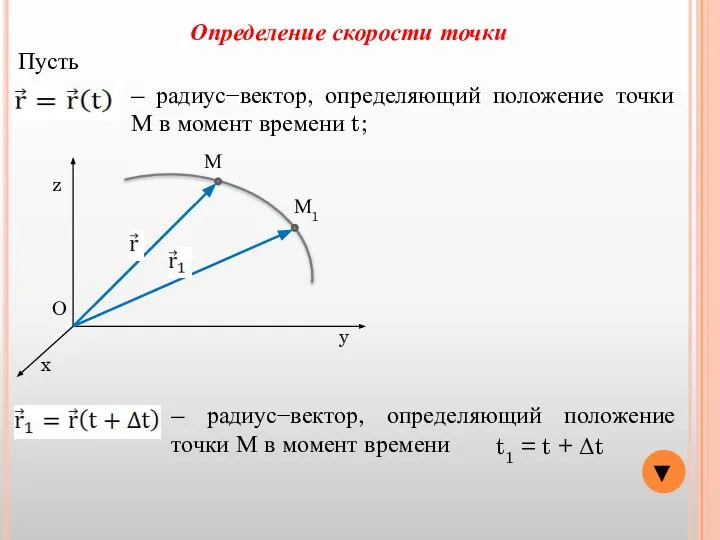
- 3. Пусть x y z О М ▼ Определение скорости точки – радиус−вектор, определяющий положение точки М
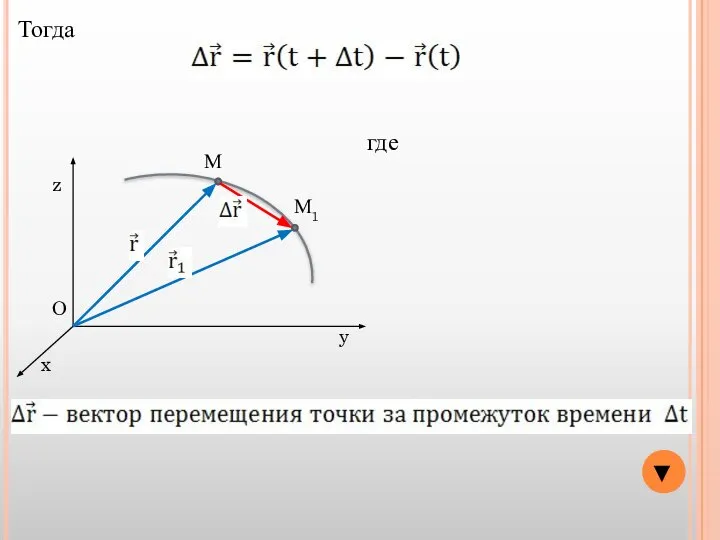
- 4. x y z О М ▼ М1 Тогда где
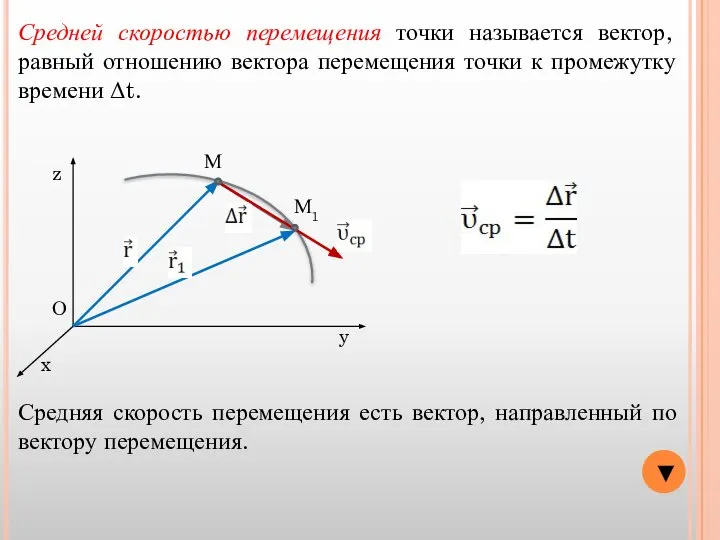
- 5. x y z О М М1 ▼ Средней скоростью перемещения точки называется вектор, равный отношению вектора
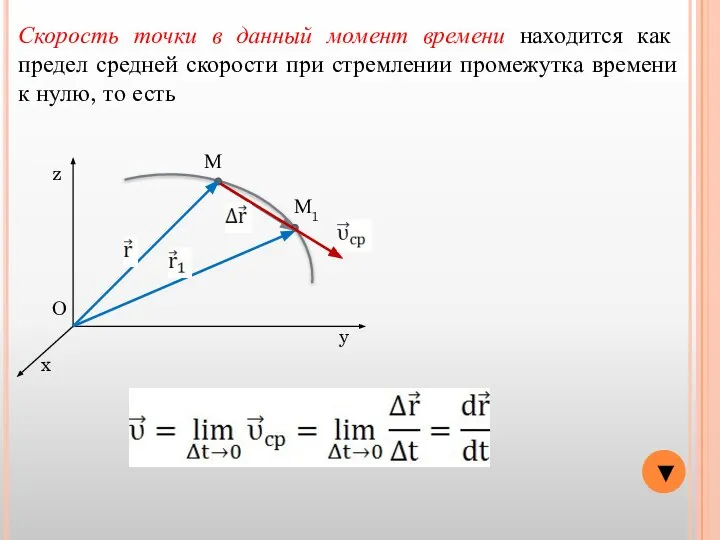
- 6. x y z О М М1 ▼ Скорость точки в данный момент времени находится как предел
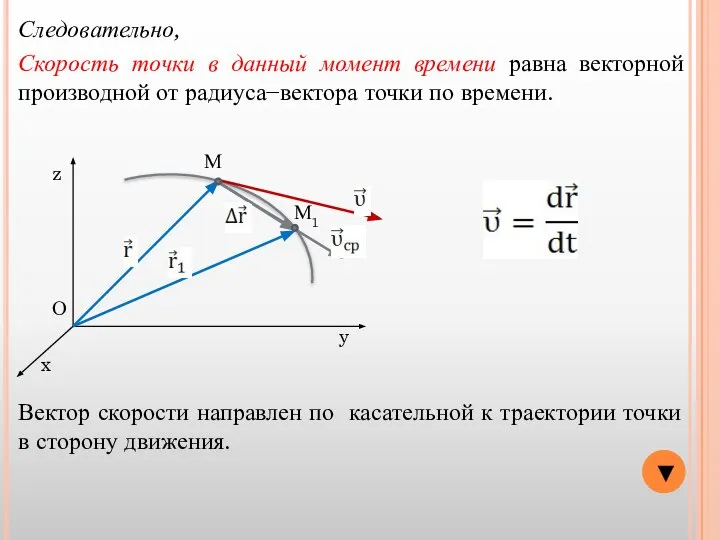
- 7. x y z О М М1 ▼ Следовательно, Скорость точки в данный момент времени равна векторной
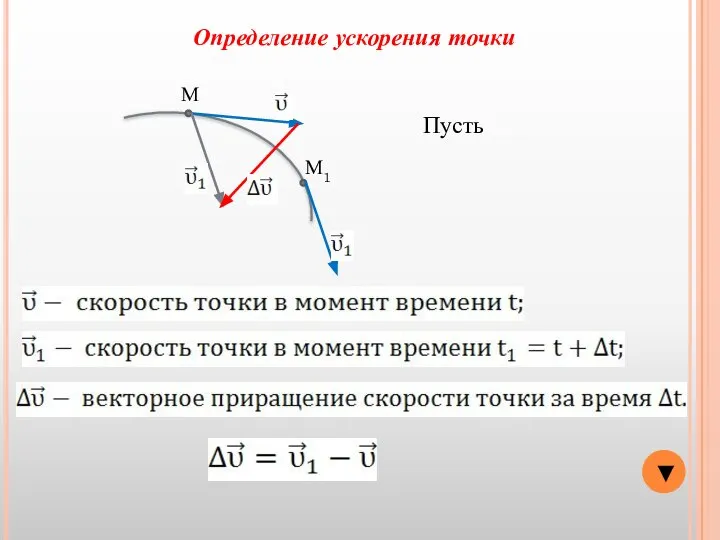
- 8. Определение ускорения точки Пусть М М1 ▼
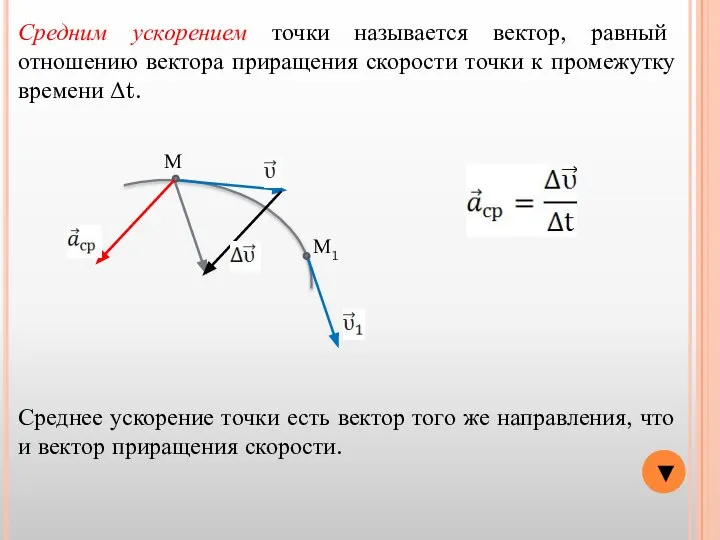
- 9. М М1 ▼ Средним ускорением точки называется вектор, равный отношению вектора приращения скорости точки к промежутку
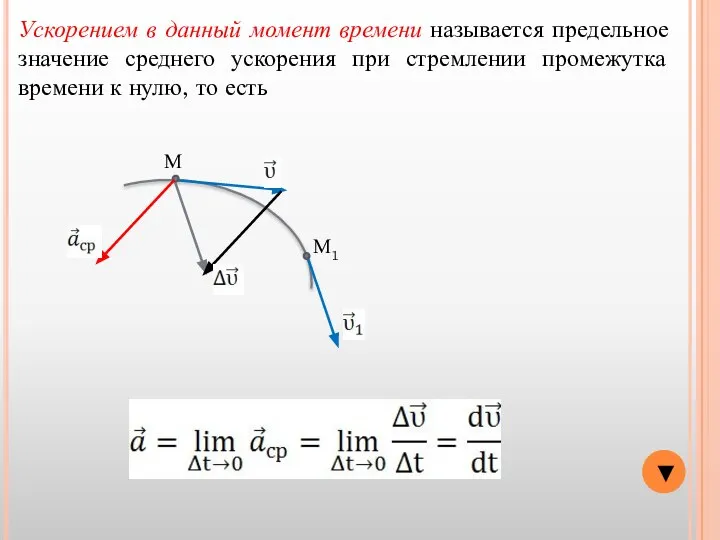
- 10. М М1 ▼ Ускорением в данный момент времени называется предельное значение среднего ускорения при стремлении промежутка
- 12. Скачать презентацию
Слайд 3Пусть
x
y
z
О
М
▼
Определение скорости точки
– радиус−вектор, определяющий положение точки М в момент времени t;
Пусть
x
y
z
О
М
▼
Определение скорости точки
– радиус−вектор, определяющий положение точки М в момент времени t;
Слайд 4x
y
z
О
М
▼
М1
Тогда
где
x
y
z
О
М
▼
М1
Тогда
где
Слайд 5x
y
z
О
М
М1
▼
Средней скоростью перемещения точки называется вектор, равный отношению вектора перемещения точки к
x
y
z
О
М
М1
▼
Средней скоростью перемещения точки называется вектор, равный отношению вектора перемещения точки к
Слайд 6x
y
z
О
М
М1
▼
Скорость точки в данный момент времени находится как предел средней скорости при
x
y
z
О
М
М1
▼
Скорость точки в данный момент времени находится как предел средней скорости при
Слайд 7x
y
z
О
М
М1
▼
Следовательно,
Скорость точки в данный момент времени равна векторной производной от радиуса−вектора точки
x
y
z
О
М
М1
▼
Следовательно,
Скорость точки в данный момент времени равна векторной производной от радиуса−вектора точки
Слайд 8Определение ускорения точки
Пусть
М
М1
▼
Определение ускорения точки
Пусть
М
М1
▼
Слайд 9М
М1
▼
Средним ускорением точки называется вектор, равный отношению вектора приращения скорости точки к
М
М1
▼
Средним ускорением точки называется вектор, равный отношению вектора приращения скорости точки к
Слайд 10М
М1
▼
Ускорением в данный момент времени называется предельное значение среднего ускорения при стремлении
М
М1
▼
Ускорением в данный момент времени называется предельное значение среднего ускорения при стремлении
 Окружающие нас тела называются физическими телами. Строение вещества. Молекула
Окружающие нас тела называются физическими телами. Строение вещества. Молекула Задача №16 Магнитная пушка
Задача №16 Магнитная пушка Радуга
Радуга Ультразвуковой контроль (УЗК)
Ультразвуковой контроль (УЗК) Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Потенциальная энергия заряженного тела в однородном электростатическом поле
Потенциальная энергия заряженного тела в однородном электростатическом поле ИК-спектроскопия
ИК-спектроскопия Магнитное поле и его характеристики
Магнитное поле и его характеристики Классификация и описание основных спектроскопических методов исследования поверхности и наноструктур. Лекция 1
Классификация и описание основных спектроскопических методов исследования поверхности и наноструктур. Лекция 1 Закон всемирного тяготения
Закон всемирного тяготения Управление параметрами излучения мультиферроиковой структуры электрическим полем
Управление параметрами излучения мультиферроиковой структуры электрическим полем Система термической стабилизации масла в системе смазки подшипников скольжения
Система термической стабилизации масла в системе смазки подшипников скольжения Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. Лекция № 3
Проводники в электростатическом поле. Конденсаторы. Энергия электрического поля. Лекция № 3 Развитие навыков смыслового чтения на уроках физики
Развитие навыков смыслового чтения на уроках физики Внутренняя энергия
Внутренняя энергия Меры времени, длины, тяжести
Меры времени, длины, тяжести Физика. Механика. Лекция 1-2
Физика. Механика. Лекция 1-2 Магнитные материалы и компоненты. (Лекция 6)
Магнитные материалы и компоненты. (Лекция 6)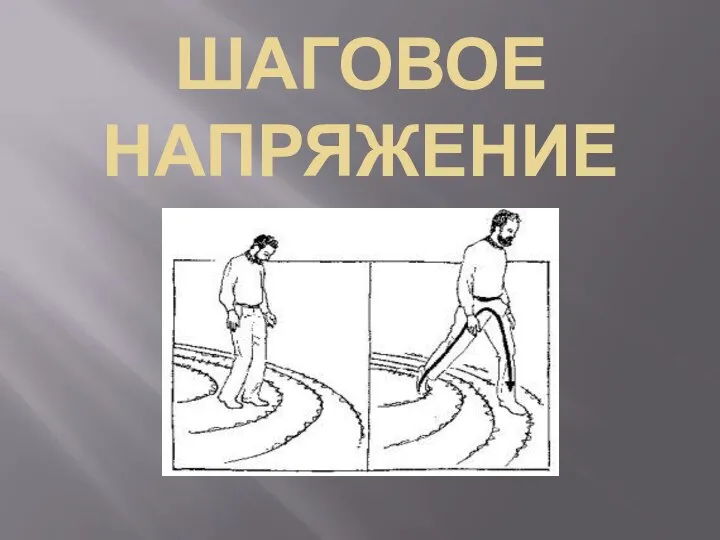 Шаговое напряжение
Шаговое напряжение Термодинамика Термодинамика (Волькенштейн-1990) Первое начало термодинамики 5.162 5.165 5.186 5.185 5.159 5.170 5.182 Второе начало терм
Термодинамика Термодинамика (Волькенштейн-1990) Первое начало термодинамики 5.162 5.165 5.186 5.185 5.159 5.170 5.182 Второе начало терм Устройство, работа, возможные неисправности системы охлаждения двигателя КамАЗ -740. ТО системы охлаждения
Устройство, работа, возможные неисправности системы охлаждения двигателя КамАЗ -740. ТО системы охлаждения маятник. волны
маятник. волны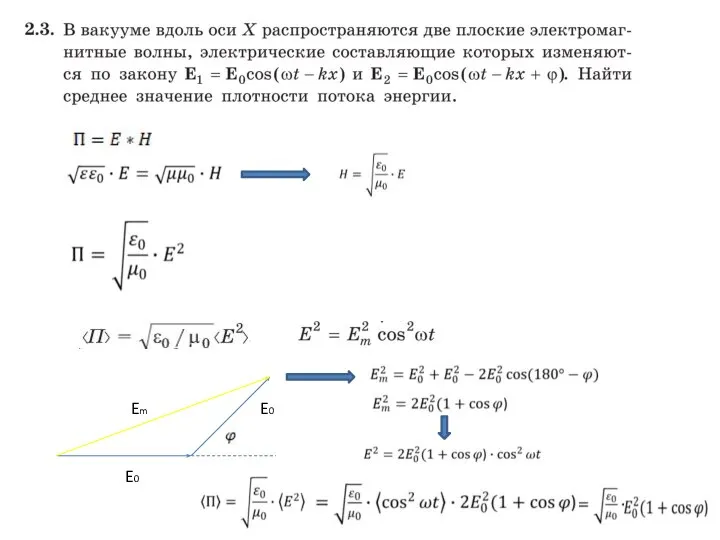 Плоские электромагнитные волны
Плоские электромагнитные волны Електричний струм
Електричний струм Последовательность операций
Последовательность операций Сила упругости. Закон Гука
Сила упругости. Закон Гука Конструкция самолета и безколлекторный двигатель
Конструкция самолета и безколлекторный двигатель Электрическая цепь и её составные части
Электрическая цепь и её составные части