- Управляющие процессы и их формализованное описание

Содержание
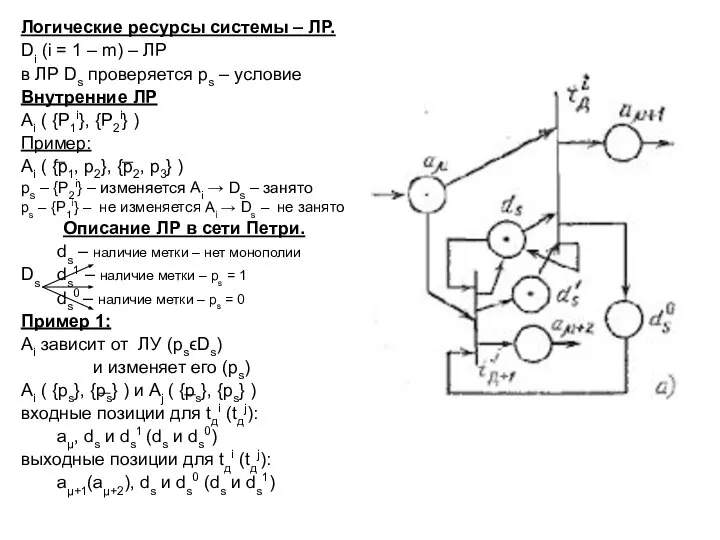
- 2. Логические ресурсы системы – ЛР. Di (i = 1 – m) – ЛР в ЛР Ds
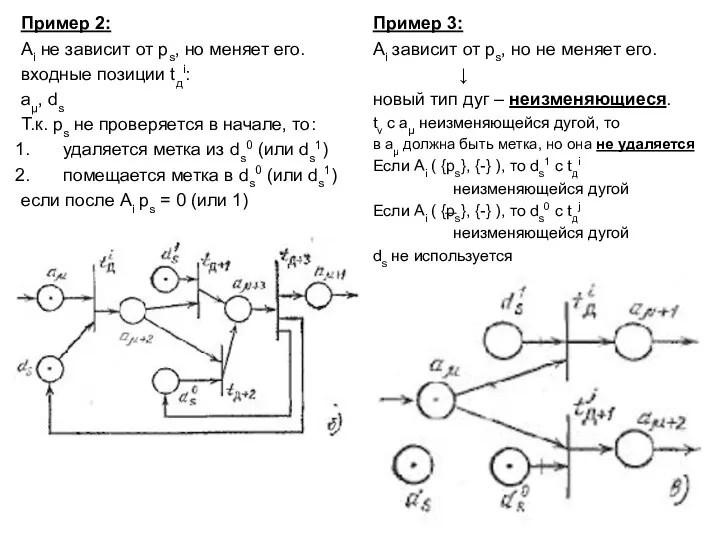
- 3. Пример 2: Ai не зависит от ps, но меняет его. входные позиции tдi: aµ, ds Т.к.
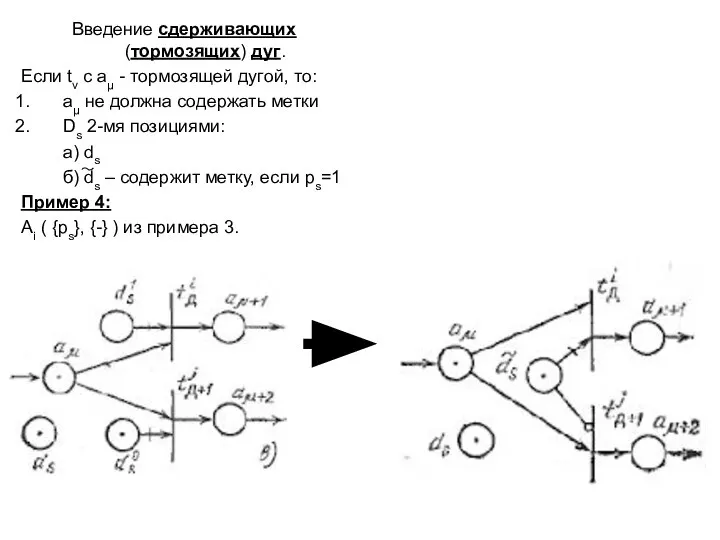
- 4. Введение сдерживающих (тормозящих) дуг. Если tv c aµ - тормозящей дугой, то: aµ не должна содержать
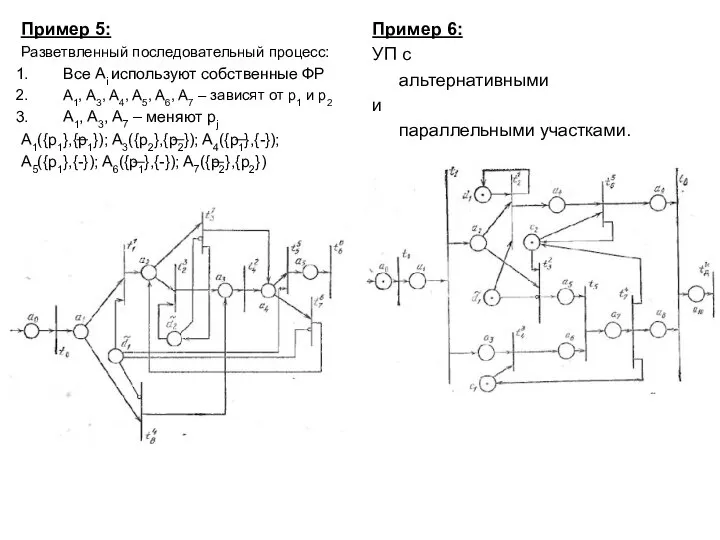
- 5. Пример 5: Разветвленный последовательный процесс: Все Ai используют собственные ФР A1, A3, A4, A5, A6, A7
- 6. Обобщенная сеть Петри для описания неавтономного управляющего процесса.
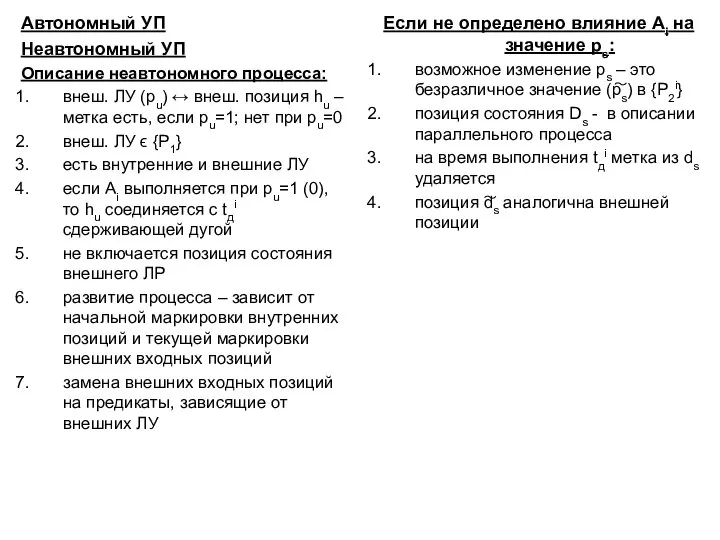
- 7. Автономный УП Неавтономный УП Описание неавтономного процесса: внеш. ЛУ (pu) ↔ внеш. позиция hu – метка
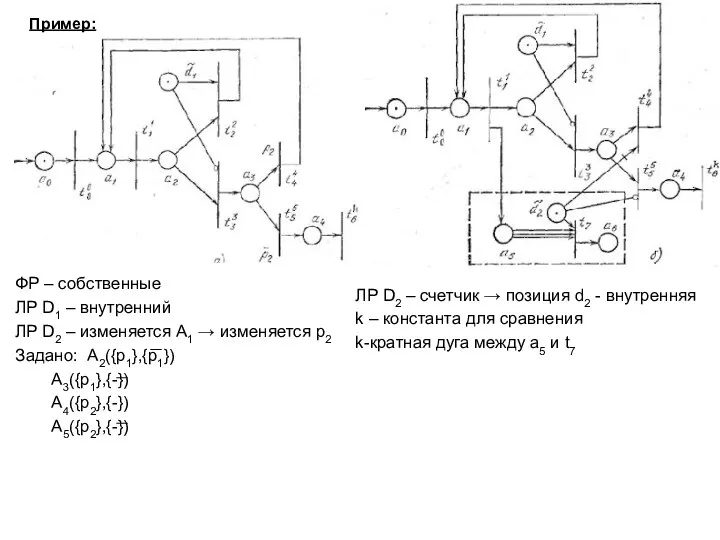
- 8. Пример: ФР – собственные ЛР D1 – внутренний ЛР D2 – изменяется A1 → изменяется p2
- 10. Скачать презентацию
Слайд 3Пример 2:
Ai не зависит от ps, но меняет его.
входные позиции tдi:
aµ, ds
Т.к.
Пример 2:
Ai не зависит от ps, но меняет его.
входные позиции tдi:
aµ, ds
Т.к.
Слайд 4Введение сдерживающих (тормозящих) дуг.
Если tv c aµ - тормозящей дугой, то:
aµ не
Введение сдерживающих (тормозящих) дуг.
Если tv c aµ - тормозящей дугой, то:
aµ не
Слайд 5Пример 5:
Разветвленный последовательный процесс:
Все Ai используют собственные ФР
A1, A3, A4, A5, A6,
Пример 5:
Разветвленный последовательный процесс:
Все Ai используют собственные ФР
A1, A3, A4, A5, A6,
Слайд 6Обобщенная сеть Петри для описания неавтономного управляющего процесса.
Обобщенная сеть Петри для описания неавтономного управляющего процесса.
Слайд 7Автономный УП
Неавтономный УП
Описание неавтономного процесса:
внеш. ЛУ (pu) ↔ внеш. позиция hu –
Автономный УП
Неавтономный УП
Описание неавтономного процесса:
внеш. ЛУ (pu) ↔ внеш. позиция hu –
Слайд 8Пример:
ФР – собственные
ЛР D1 – внутренний
ЛР D2 – изменяется A1 → изменяется
Пример:
ФР – собственные
ЛР D1 – внутренний
ЛР D2 – изменяется A1 → изменяется
 Итераторы и функциональные объекты
Итераторы и функциональные объекты Этот волшебный мир медиа. Как социальные медиа изменили нашу жизнь
Этот волшебный мир медиа. Как социальные медиа изменили нашу жизнь qazaq.info Агрегатор новостей
qazaq.info Агрегатор новостей Efficient рagerank tracking in evolving networks
Efficient рagerank tracking in evolving networks Формирование изображения на экране компьютера. 7 класс
Формирование изображения на экране компьютера. 7 класс Контрольная работа по информатике
Контрольная работа по информатике Application Stepsfor Students
Application Stepsfor Students Магистерская программа Моделирование в биотехническом приборостроении
Магистерская программа Моделирование в биотехническом приборостроении Интернет как инструмент для общения. Интернет ресурсы как способ проповеди Евангелия
Интернет как инструмент для общения. Интернет ресурсы как способ проповеди Евангелия Трудоёмкость алгоритмов
Трудоёмкость алгоритмов Транспортная задача как частный случай задач линейного программирования
Транспортная задача как частный случай задач линейного программирования Система электронных ценников на базе Е-INK технологии
Система электронных ценников на базе Е-INK технологии Основная страница сайта (системы)
Основная страница сайта (системы) Логика. Дизъюнкция
Логика. Дизъюнкция Массовая оптимизация запросов PostgreSQL – explain.sbis.ru
Массовая оптимизация запросов PostgreSQL – explain.sbis.ru Основные понятия векторной графики
Основные понятия векторной графики Электронная почта
Электронная почта informatsionnye_resursy_seti_internet
informatsionnye_resursy_seti_internet Разработка обучающего веб-сайта по корейскому языку
Разработка обучающего веб-сайта по корейскому языку Можлывості компютера
Можлывості компютера Методологии разработки ПО
Методологии разработки ПО Информация, сообщения
Информация, сообщения Онлайн-доска Padlet
Онлайн-доска Padlet Сортировка в массивах
Сортировка в массивах Основы языка Visual Basic. Синтаксис
Основы языка Visual Basic. Синтаксис Пошаговая инструкция создания сводной таблицы в excel
Пошаговая инструкция создания сводной таблицы в excel Встреча Третья. Web-дизайн против проектирования интерфейсов
Встреча Третья. Web-дизайн против проектирования интерфейсов Основы проектной деятельности
Основы проектной деятельности