- Линейные дискретные системы с постоянными параметрами. Лекция 6

Содержание
- 2. 1. Понятие линейной дискретной системы с постоянными параметрами. Дискретный фильтр (система) — это произвольная система обработки
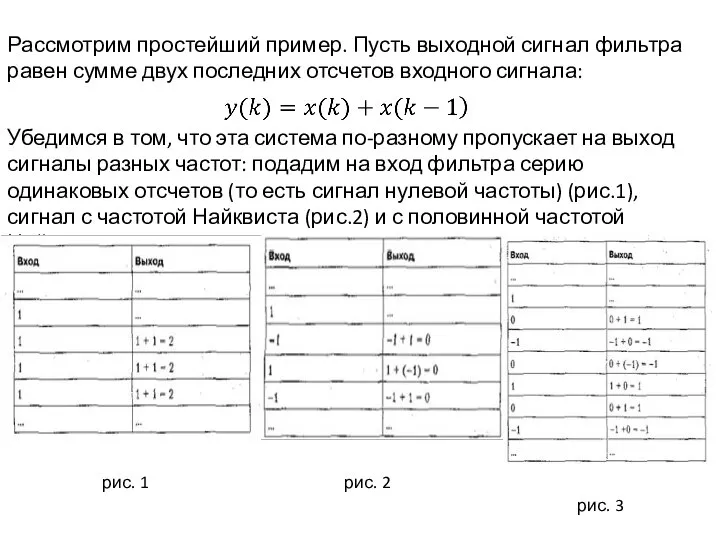
- 3. Рассмотрим простейший пример. Пусть выходной сигнал фильтра равен сумме двух последних отсчетов входного сигнала: Убедимся в
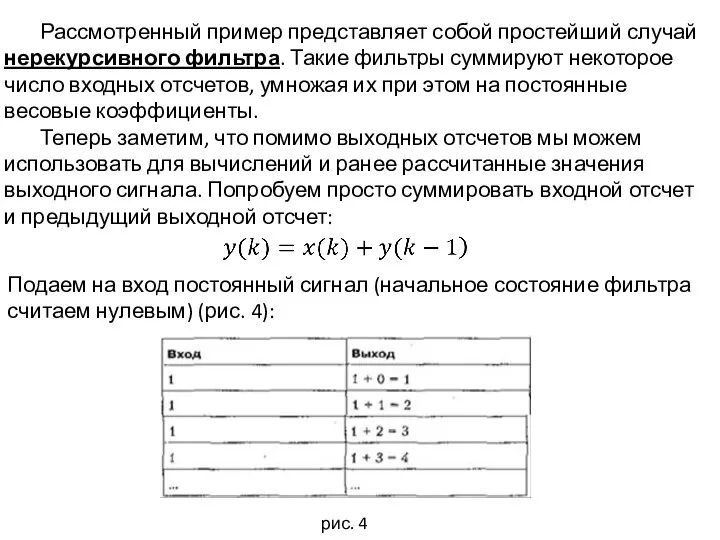
- 4. Рассмотренный пример представляет собой простейший случай нерекурсивного фильтра. Такие фильтры суммируют некоторое число входных отсчетов, умножая
- 5. Выходной сигнал будет линейно нарастать, что рано или поздно приведет к переполнению разрядной сетки вычислительного устройства.
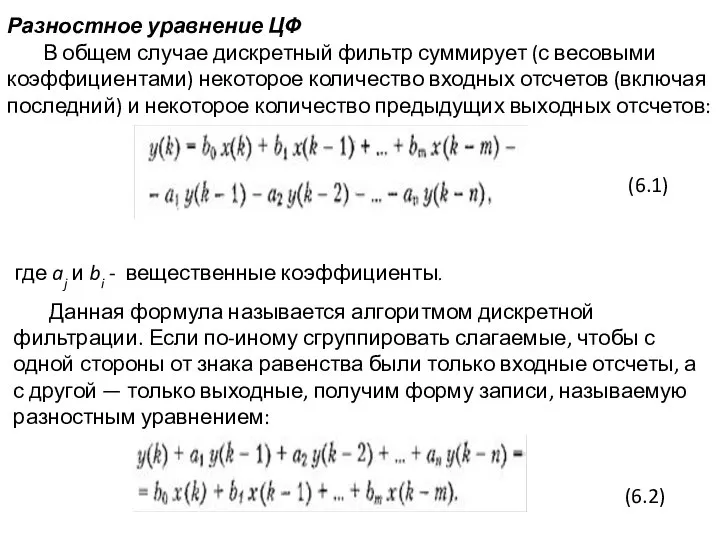
- 6. Разностное уравнение ЦФ В общем случае дискретный фильтр суммирует (с весовыми коэффициентами) некоторое количество входных отсчетов
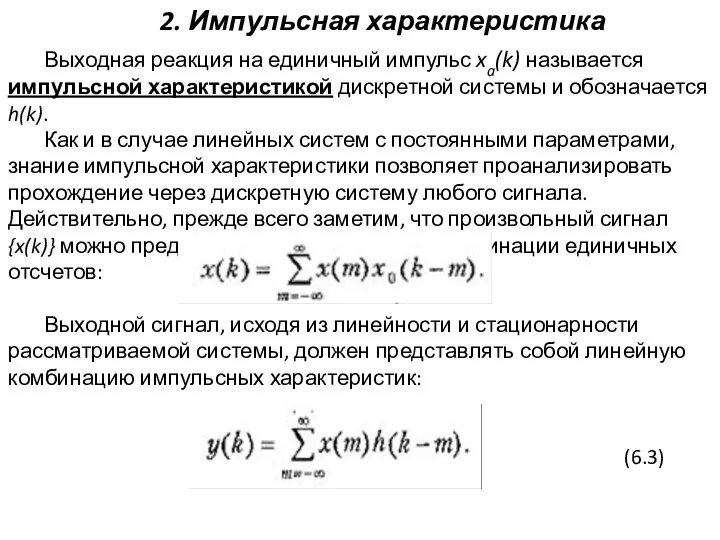
- 7. 2. Импульсная характеристика Выходная реакция на единичный импульс xa(k) называется импульсной характеристикой дискретной системы и обозначается
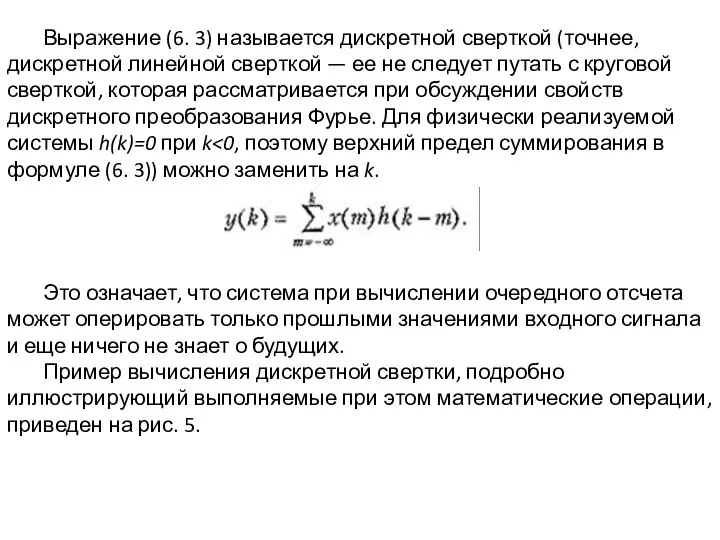
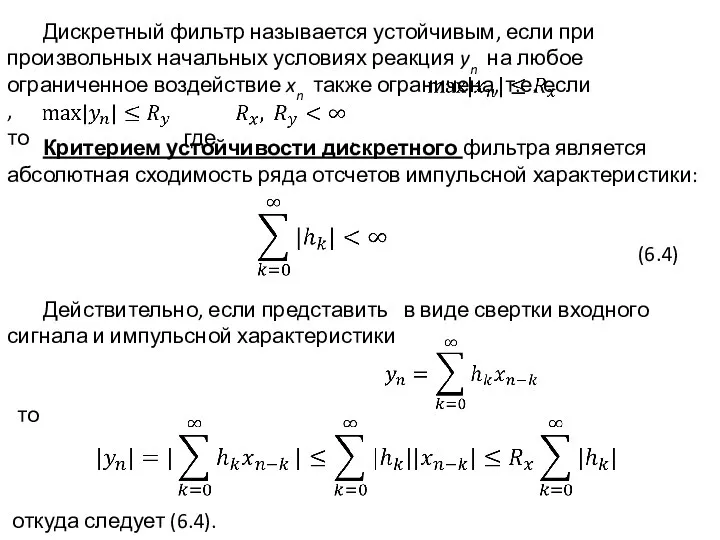
- 8. Выражение (6. 3) называется дискретной сверткой (точнее, дискретной линейной сверткой — ее не следует путать с
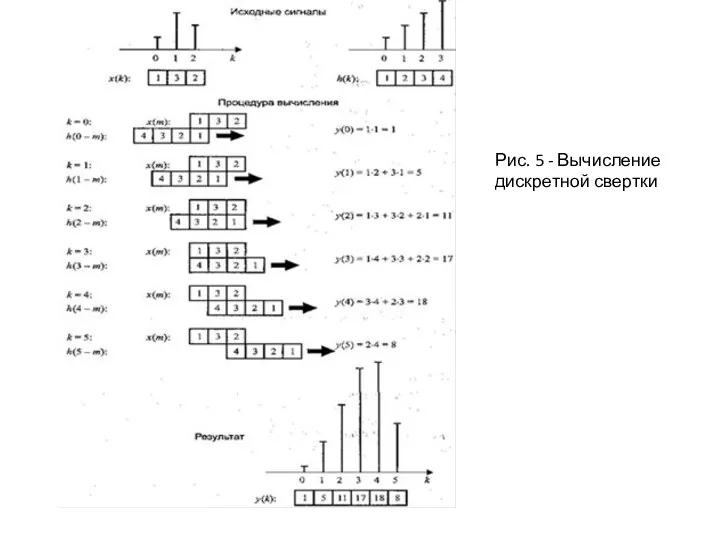
- 9. Рис. 5 - Вычисление дискретной свертки
- 10. Как для любой дискретной системы для дискретного фильтра справедливо выражение дискретной свертки где yn – отсчеты
- 11. 3. Устойчивость дискретных систем При отсутствии входного сигнала в дискретной системе могут существовать свободные колебания. Их
- 12. Дискретный фильтр называется устойчивым, если при произвольных начальных условиях реакция yn на любое ограниченное воздействие xn
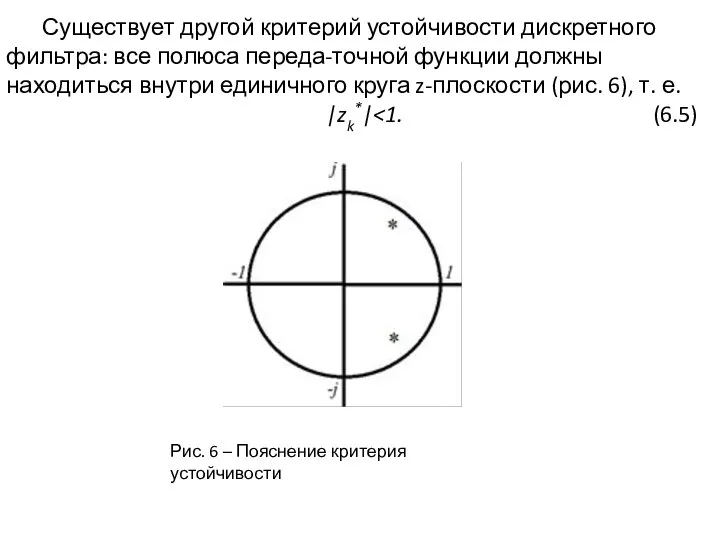
- 13. Существует другой критерий устойчивости дискретного фильтра: все полюса переда-точной функции должны находиться внутри единичного круга z-плоскости
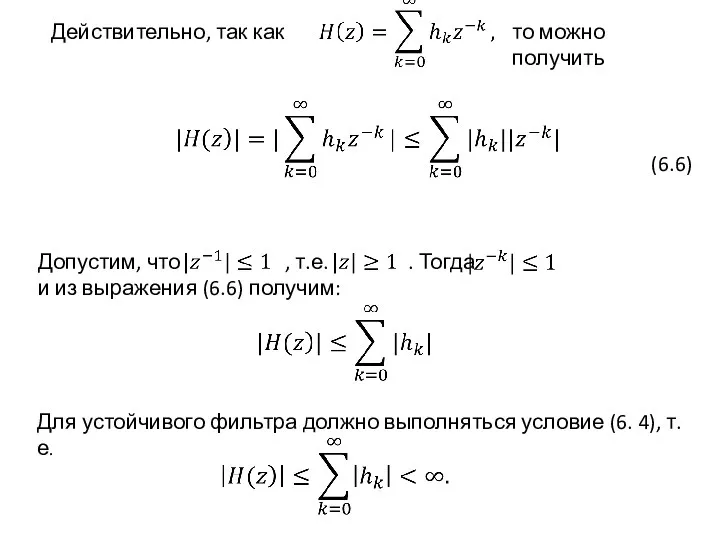
- 14. Действительно, так как то можно получить (6.6) Допустим, что , т.е. . Тогда и из выражения
- 16. Скачать презентацию
Слайд 21. Понятие линейной дискретной системы с постоянными параметрами.
Дискретный фильтр (система) —
1. Понятие линейной дискретной системы с постоянными параметрами.
Дискретный фильтр (система) —
Слайд 3Рассмотрим простейший пример. Пусть выходной сигнал фильтра равен сумме двух последних отсчетов
Рассмотрим простейший пример. Пусть выходной сигнал фильтра равен сумме двух последних отсчетов
Слайд 4 Рассмотренный пример представляет собой простейший случай нерекурсивного фильтра. Такие фильтры суммируют некоторое
Рассмотренный пример представляет собой простейший случай нерекурсивного фильтра. Такие фильтры суммируют некоторое
Слайд 5 Выходной сигнал будет линейно нарастать, что рано или поздно приведет к переполнению
Выходной сигнал будет линейно нарастать, что рано или поздно приведет к переполнению
Слайд 6Разностное уравнение ЦФ
В общем случае дискретный фильтр суммирует (с весовыми коэффициентами) некоторое
Разностное уравнение ЦФ
В общем случае дискретный фильтр суммирует (с весовыми коэффициентами) некоторое
Слайд 72. Импульсная характеристика
Выходная реакция на единичный импульс xa(k) называется импульсной характеристикой дискретной
2. Импульсная характеристика
Выходная реакция на единичный импульс xa(k) называется импульсной характеристикой дискретной
Слайд 8
Выражение (6. 3) называется дискретной сверткой (точнее, дискретной линейной сверткой — ее
Выражение (6. 3) называется дискретной сверткой (точнее, дискретной линейной сверткой — ее
Слайд 9Рис. 5 - Вычисление дискретной свертки
Рис. 5 - Вычисление дискретной свертки
Слайд 10 Как для любой дискретной системы для дискретного фильтра справедливо выражение дискретной свертки
где
Как для любой дискретной системы для дискретного фильтра справедливо выражение дискретной свертки
где
Слайд 113. Устойчивость дискретных систем
При отсутствии входного сигнала в дискретной системе могут существовать
3. Устойчивость дискретных систем
При отсутствии входного сигнала в дискретной системе могут существовать
Слайд 12 Дискретный фильтр называется устойчивым, если при произвольных начальных условиях реакция yn на
Дискретный фильтр называется устойчивым, если при произвольных начальных условиях реакция yn на
Слайд 13 Существует другой критерий устойчивости дискретного фильтра: все полюса переда-точной функции должны находиться
Существует другой критерий устойчивости дискретного фильтра: все полюса переда-точной функции должны находиться
Слайд 14 Действительно, так как
то можно получить
(6.6)
Допустим, что , т.е. . Тогда
Действительно, так как
то можно получить
(6.6)
Допустим, что , т.е. . Тогда
 Действительный анализ. Глава 2. Измеримые множества
Действительный анализ. Глава 2. Измеримые множества Фракталы
Фракталы Решение задач по теме: Четырехугольники
Решение задач по теме: Четырехугольники Тригонометрические формулы. Диктант
Тригонометрические формулы. Диктант Теория вероятностей и математическая статистика. Лекция 6 ТВ
Теория вероятностей и математическая статистика. Лекция 6 ТВ Корни натуральной степени из числа и их свойства
Корни натуральной степени из числа и их свойства Сочетания. Задачи
Сочетания. Задачи Многоугольник тетраэдр
Многоугольник тетраэдр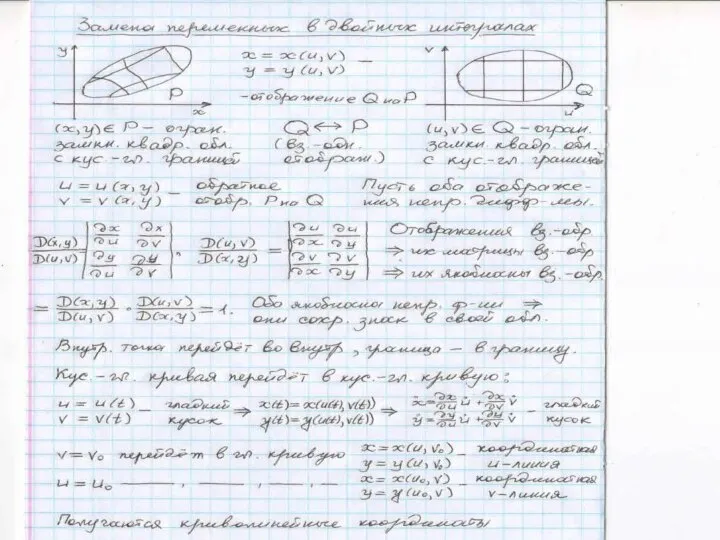 Замена переменных в двойных интегралах
Замена переменных в двойных интегралах Математика. Разминка
Математика. Разминка Пример проектирования цифрового устройства
Пример проектирования цифрового устройства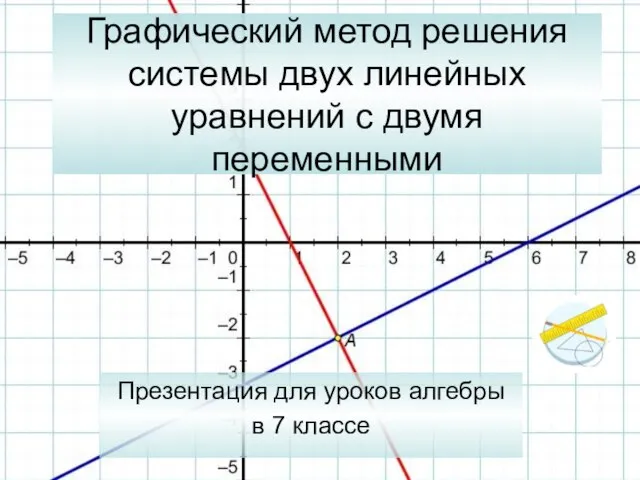 Презентация на тему Графический метод решения систем
Презентация на тему Графический метод решения систем  Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Простейшие задачи в координатах
Простейшие задачи в координатах Дробные числительные
Дробные числительные Величины. Объём
Величины. Объём Линейная функция. Работа по графику
Линейная функция. Работа по графику Уравнения с двумя переменными
Уравнения с двумя переменными Теоремы сложения и умножения вероятностей
Теоремы сложения и умножения вероятностей Трапеция
Трапеция ОГЭ 2020-21. Задание №9. Найдите корень уравнения
ОГЭ 2020-21. Задание №9. Найдите корень уравнения Проекции вектора на оси координат
Проекции вектора на оси координат Алгебра логики при решении практических задач
Алгебра логики при решении практических задач Перпендикулярности прямой и плоскости
Перпендикулярности прямой и плоскости Подготовка к ОГЭ по геометрии (9 класс)
Подготовка к ОГЭ по геометрии (9 класс) Методика изучения одномерных геометрических фигур: ломаная, многоугольники и их виды: прямоугольник, квадрат и их свойства
Методика изучения одномерных геометрических фигур: ломаная, многоугольники и их виды: прямоугольник, квадрат и их свойства Интегрированный урок в 7 классе Грамотная геометрия - геометрия + русский язык
Интегрированный урок в 7 классе Грамотная геометрия - геометрия + русский язык Сложение и вычитание в пределах 20
Сложение и вычитание в пределах 20