- Момент силы относительно точки О

Содержание
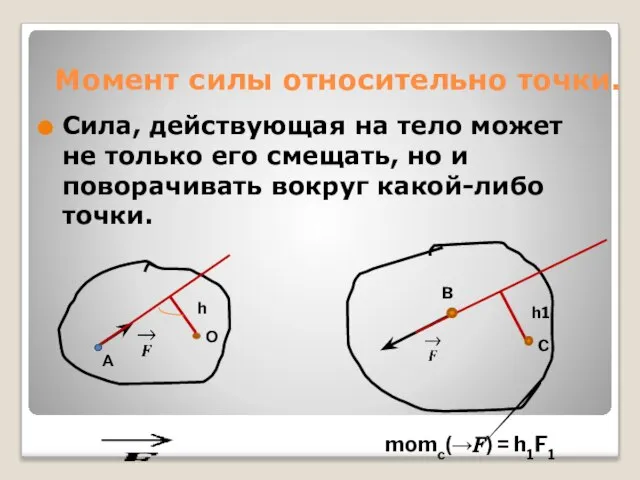
- 2. Момент силы относительно точки. Сила, действующая на тело может не только его смещать, но и поворачивать
- 3. Моментом силы F относительно центра О называется величина, равная произведению силы на кратчайшее расстояние от точки
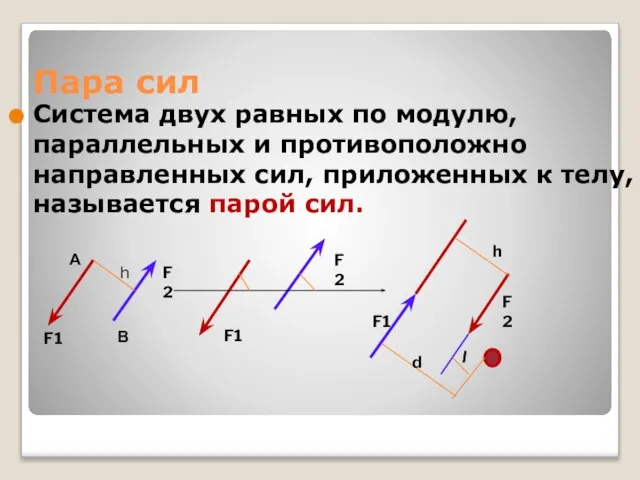
- 4. Пара сил Система двух равных по модулю, параллельных и противоположно направленных сил, приложенных к телу, называется
- 5. Момент пары сил Плечом пары сил называется кратчайшее расстояние между линиями действия сил, составляющих пару. Моментом
- 6. Свойства пары сил
- 7. Контрольные вопросы 1. Что такое сила? 2. Какие силы называются уравновешивающими? 3. Что называется равнодействующей силой?
- 8. Плоская произвольная система сил На твердое тело действует произвольная система сил F1, F2, F3 (рис.1.17,а). Приложим
- 9. Х У
- 10. Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И система пар сил с моментами
- 11. В результате приведения всех сил к точке, определяем, что Произвольную плоскую систему сил можно заменить одной
- 12. Точка О – называется центром приведения. Вектор R – главный вектор не зависит от центра приведения.
- 14. Скачать презентацию
Слайд 3Моментом силы F относительно центра О называется величина, равная произведению силы на
Моментом силы F относительно центра О называется величина, равная произведению силы на
Слайд 4Пара сил
Система двух равных по модулю, параллельных и противоположно направленных сил, приложенных
Пара сил
Система двух равных по модулю, параллельных и противоположно направленных сил, приложенных
Слайд 5Момент пары сил
Плечом пары сил называется кратчайшее расстояние между линиями действия сил,
Момент пары сил
Плечом пары сил называется кратчайшее расстояние между линиями действия сил,
Слайд 6Свойства пары сил
Свойства пары сил
Слайд 7Контрольные вопросы
1. Что такое сила?
2. Какие силы называются уравновешивающими?
3. Что называется равнодействующей
Контрольные вопросы
1. Что такое сила?
2. Какие силы называются уравновешивающими?
3. Что называется равнодействующей
Слайд 8Плоская произвольная система сил
На твердое тело действует произвольная система сил F1, F2,
Плоская произвольная система сил
На твердое тело действует произвольная система сил F1, F2,
Слайд 9Х
У
Х
У
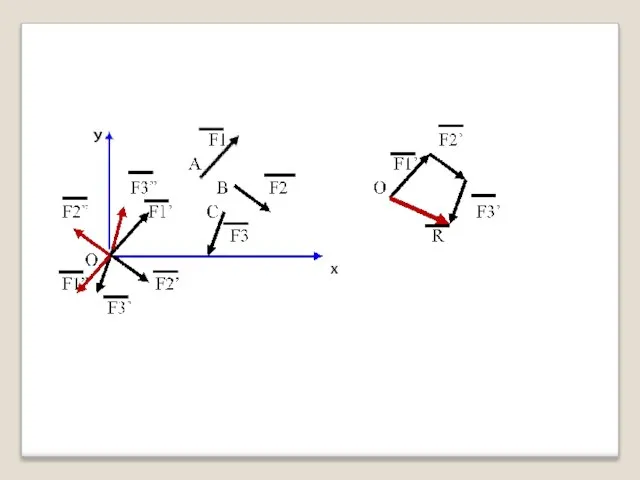
Слайд 10Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И система
Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И система
Слайд 11В результате приведения всех сил к точке, определяем, что Произвольную плоскую систему
В результате приведения всех сил к точке, определяем, что Произвольную плоскую систему
Слайд 12Точка О – называется центром приведения.
Вектор R – главный вектор не зависит
Точка О – называется центром приведения.
Вектор R – главный вектор не зависит
 Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Поворот. Типы вращений
Поворот. Типы вращений Многоугольники
Многоугольники Индивидуальный проект на тему Золотое сечение в природе
Индивидуальный проект на тему Золотое сечение в природе Правильный многогранник
Правильный многогранник Решение дифференциальных уравнений первого порядка
Решение дифференциальных уравнений первого порядка Презентация на тему Ознакомление с различными способами деления суммы на число
Презентация на тему Ознакомление с различными способами деления суммы на число  Теорема Пифагора
Теорема Пифагора Задачи для всех-всех-всех
Задачи для всех-всех-всех Тела вращения
Тела вращения Понятие композиции отношений. Виды отношений
Понятие композиции отношений. Виды отношений Коэффициент. Числовой коэффициент
Коэффициент. Числовой коэффициент Статистика. Занятие 5
Статистика. Занятие 5 Поможем Айболиту
Поможем Айболиту Можно ли без шаблона разметить круг?
Можно ли без шаблона разметить круг? Мой кабинет – моя лаборатория Презентацию подготовила заведующая школьным кабинетом математики №14 Ларионова Татьяна Ивановна.
Мой кабинет – моя лаборатория Презентацию подготовила заведующая школьным кабинетом математики №14 Ларионова Татьяна Ивановна. Решение показательных уравнений
Решение показательных уравнений Тригонометрический круг
Тригонометрический круг Построение графиков тригонометрических функций
Построение графиков тригонометрических функций Умножение двузначных чисел
Умножение двузначных чисел Элементы теории вероятности в практических задачах
Элементы теории вероятности в практических задачах Тригонометрический круг
Тригонометрический круг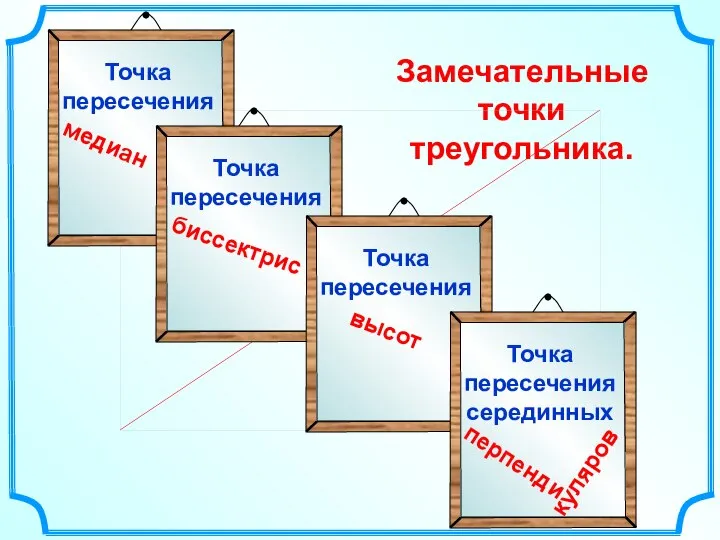 Замечательные точки треугольника
Замечательные точки треугольника Začíname s rovnicami. Riešenie jednoduchých rovníc
Začíname s rovnicami. Riešenie jednoduchých rovníc Последние цифры степеней
Последние цифры степеней Násobíme a delíme s Mimoňmi
Násobíme a delíme s Mimoňmi Квадратный корень
Квадратный корень Системы уравнений
Системы уравнений