- Подстановки, оптимизация и решение дифференциальных уравнений (задача Коши)

Содержание
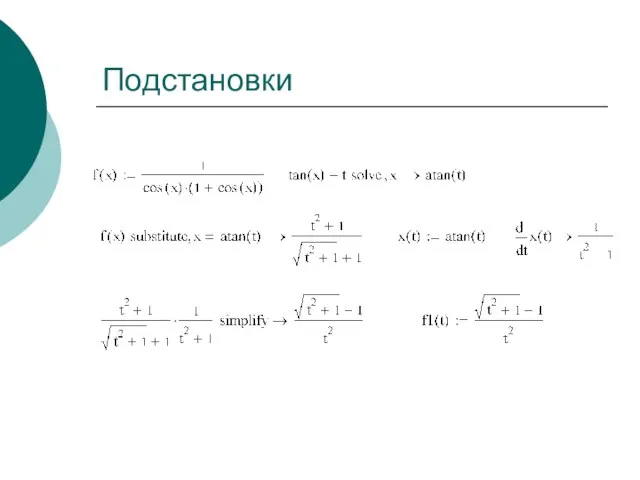
- 2. Подстановки
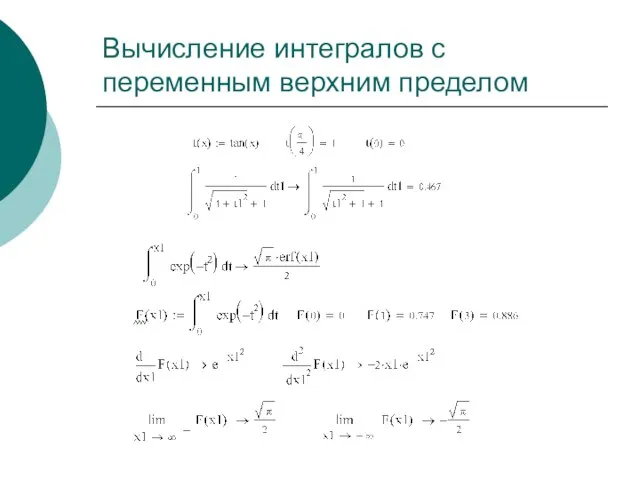
- 3. Вычисление интегралов с переменным верхним пределом
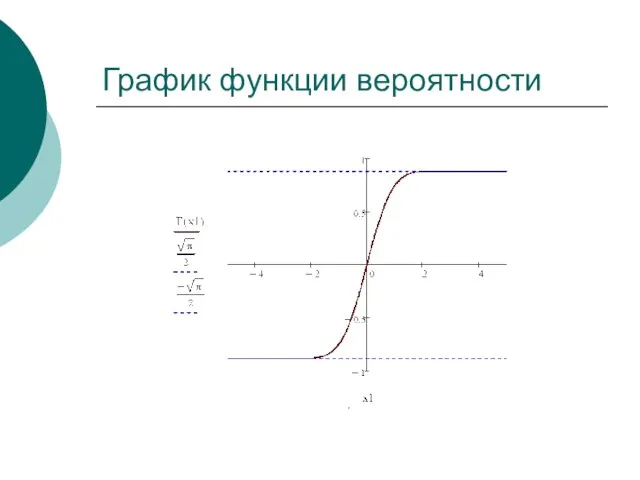
- 4. График функции вероятности
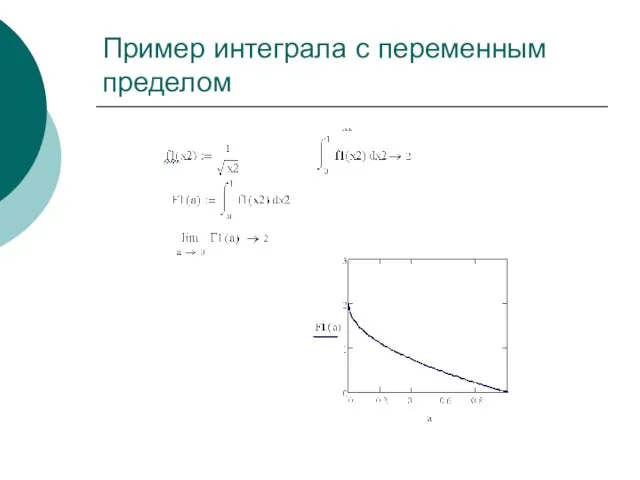
- 5. Пример интеграла с переменным пределом
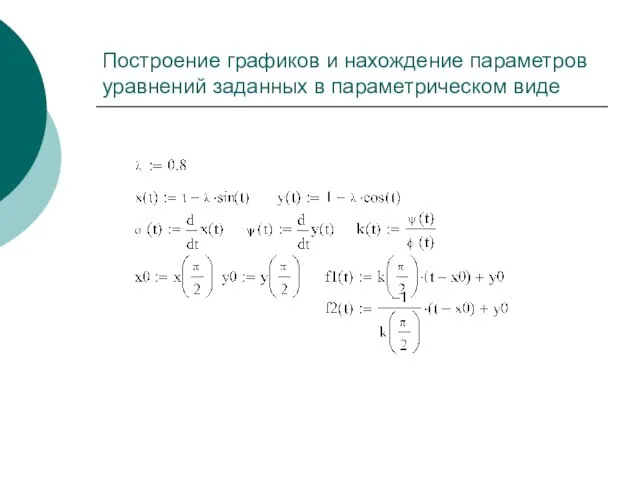
- 6. Построение графиков и нахождение параметров уравнений заданных в параметрическом виде
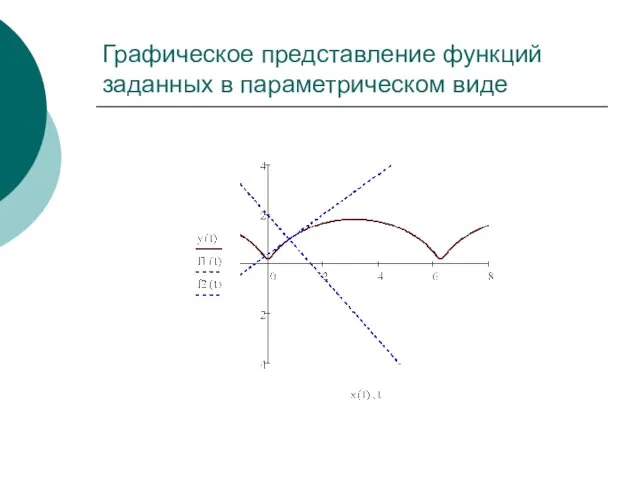
- 7. Графическое представление функций заданных в параметрическом виде
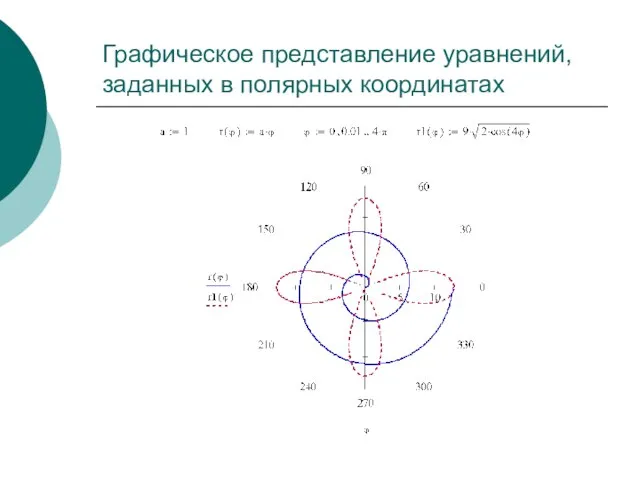
- 8. Графическое представление уравнений, заданных в полярных координатах
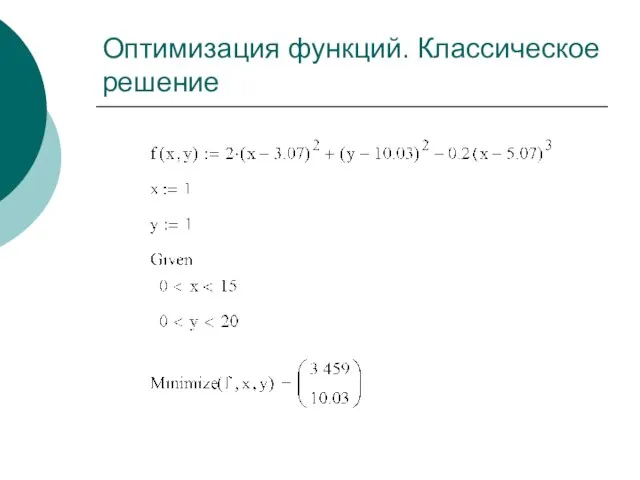
- 9. Оптимизация функций. Классическое решение
- 10. График поверхности оптимизации
- 11. Контурный график заданной функции оптимизации
- 12. Построение графиков функций в полярных координатах
- 13. Второй (матричный) способ построения графика поверхности
- 14. Контурный график поверхности
- 15. Нахождение целевой функции
- 16. Нахождение локального минимума
- 17. Максимум двумерного гауссиана
- 18. Нахождение корней функций одной переменной
- 19. Решение задачи безусловной оптимизации Р е ш е н и е з а д а ч
- 20. Нахождение стационарных точек
- 21. Построение матрицы Гессе
- 22. Построение матрицы Гессе (продолжение). Проверка 1 стационарной точки на экстремум
- 23. Проверка матрицей Гессе второй стационарной точки на экстремум
- 24. Подтверждение правильности нахождения точки минимума
- 25. Построение графика функции и её контурного графика
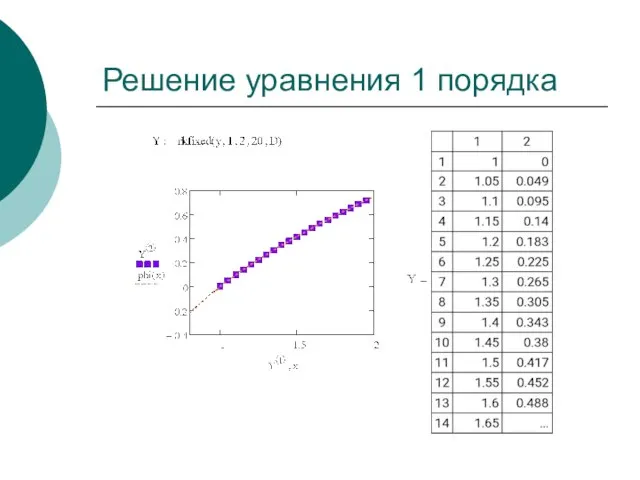
- 26. Решение дифференциальных уравнений 1 и 2 –го порядка Диф уравнение имеет вид: y’ = (1+x*y)/x^2, y(1)
- 27. Решение уравнения 1 порядка
- 28. Решение однородного уравнения 2 порядка Уравнение второго порядка имеет вид: xy’’-(x+1)y’-2(x-1)y=0. Строим вектор-столбец начальных условий и
- 29. Решение дифуравнения 2 порядка методом Рунге-Кутта
- 30. Классическое решение диф. Уравнений с использованием функции Odesolve(x, xend)
- 31. График восстановленной функции и её производной
- 32. Решение системы двух дифуравнений первого порядка с начальными условиями. 5. Исследовать поведение системы, моделирующей двухмодовый режим
- 33. Порядок решения и графики временной эволюции амплитуд
- 34. Фазовый портрет системы Наблюдается устойчивый фокус, соответствующий стабилизации мод и переход их в положение с другой
- 35. Числовой формат вывода Значение амплитуд в зависимости от времени задается в виде матрицы, состоящей из трех
- 36. Решение дифуравнений в пакете Mathematica v. 7. DSolve[{x*y''[x]-(x+1)*y'[x]-2*(x)*y[x]==0,y[1]==e^2,y'[1]==2*e^2},y[x],x]
- 37. График полученной функции
- 38. Решение системы дифуравнений первого порядка в пакете Mathematica v.7
- 39. Построение фазового портрета с помощью параметрического графика
- 40. Временная эволюция мод с начальными параметрами а, в, с, alfa
- 41. Задание новых параметров задачи
- 42. Фазовый портрет системы при слабом взаимодействии мод
- 43. Временная эволюция амплитуд Наблюдается более медленное развитие неустойчивости, вызванное взаимодействием мод
- 44. Динамика взаимодействия мод в устойчивом режиме Задание новых параметров системы
- 45. Фазовый портрет системы в устойчивом режиме Наблюдается устойчивый фокус
- 46. Дифуравнения, обеспечивающие устойчивое развитие системы
- 47. Фазовый портрет системы в режиме устойчивого взаимодействия мод Наблюдается быстрая эволюция систмы к устойчивому состоянию с
- 48. Взаимодействие приводит к переходу системы в устойчивое состояние с изменением энергии мод
- 49. Решение дифуравнения первого порядка методом Рунге –Кутта -4
- 50. График точного решения
- 51. Решение неоднородного дифуравнения второго порядка Задача 4
- 52. Аппроксимация эмпирических данных в пакете Maple 12 > X := [1, 2, 3, 4, 5, 6,
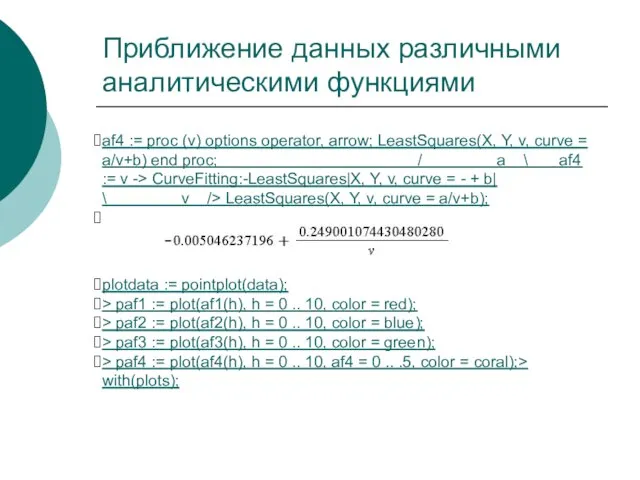
- 53. Приближение данных различными аналитическими функциями af4 := proc (v) options operator, arrow; LeastSquares(X, Y, v, curve
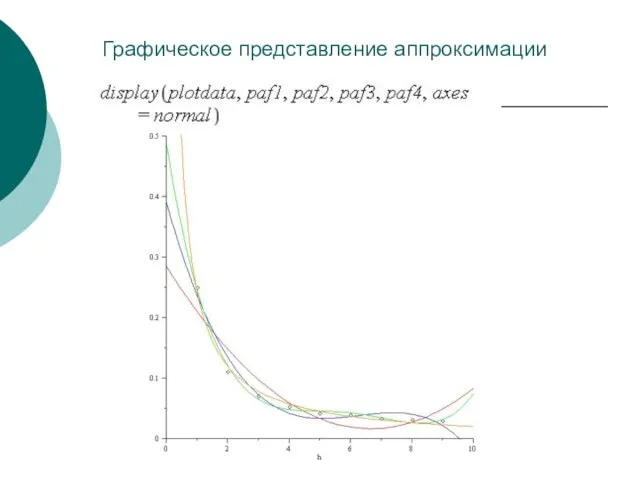
- 54. Графическое представление аппроксимации
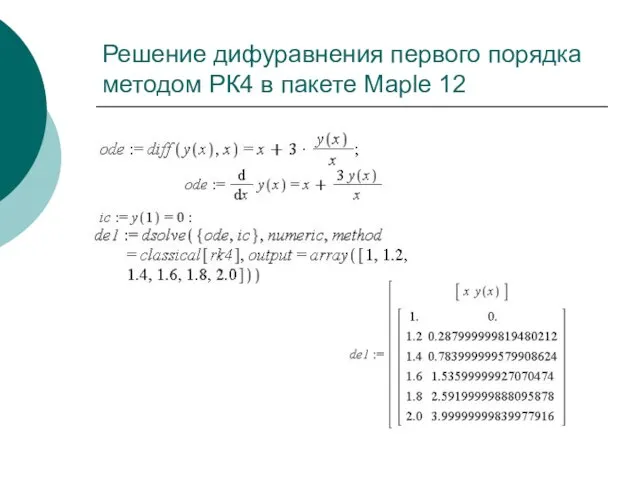
- 55. Решение дифуравнения первого порядка методом РК4 в пакете Maple 12
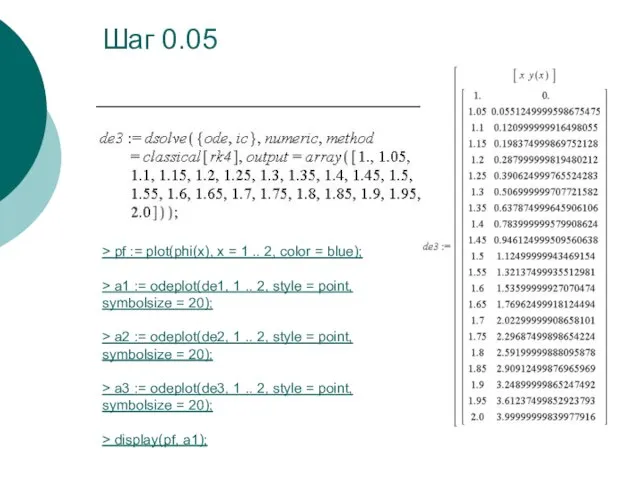
- 56. Шаг 0.05 > pf := plot(phi(x), x = 1 .. 2, color = blue); > a1
- 57. Нахождение функции с шагом 0.2 и 0.4
- 58. Численное решение ДУ методом РК с шагом 0.02
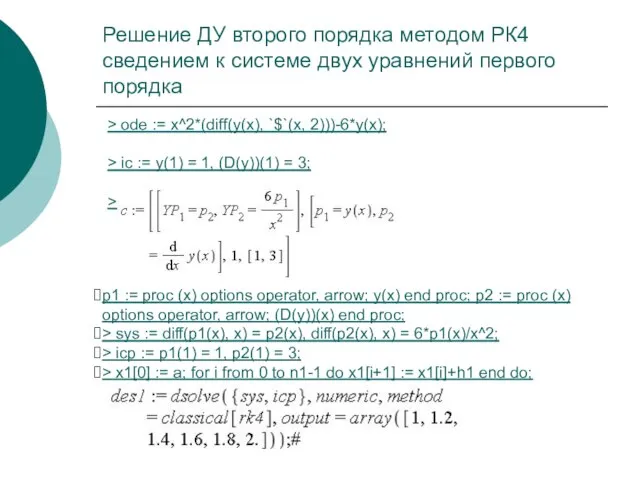
- 59. Решение ДУ второго порядка методом РК4 сведением к системе двух уравнений первого порядка > ode :=
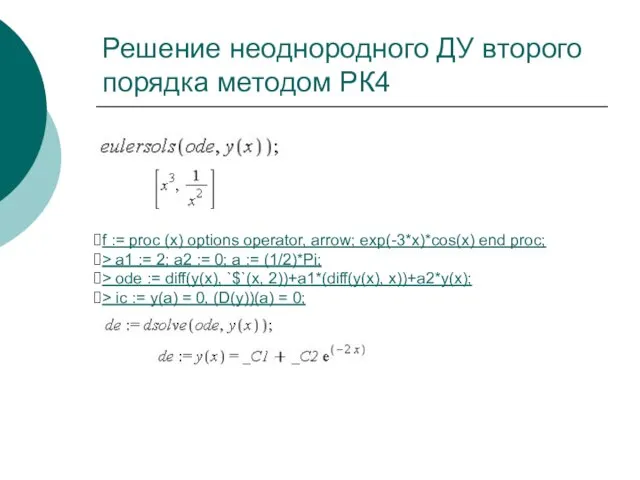
- 60. Решение неоднородного ДУ второго порядка методом РК4 f := proc (x) options operator, arrow; exp(-3*x)*cos(x) end
- 61. Решение ДУ, графическое представление > den := dsolve({ic, ode = f(x)}, y(x), numeric); > odeplot(den, 0
- 62. Решение системы ДУ первого порядка. Режимы эволюции мод restart;> ode1 := diff(x1(t), t) = (a-b*x2(t))*x1(t)-alpha*x1(t)^2; >
- 63. Фазовый портрет системы
- 65. Скачать презентацию
Слайд 3Вычисление интегралов с переменным верхним пределом
Вычисление интегралов с переменным верхним пределом
Слайд 4График функции вероятности
График функции вероятности
Слайд 5Пример интеграла с переменным пределом
Пример интеграла с переменным пределом
Слайд 6Построение графиков и нахождение параметров уравнений заданных в параметрическом виде
Построение графиков и нахождение параметров уравнений заданных в параметрическом виде
Слайд 7Графическое представление функций заданных в параметрическом виде
Графическое представление функций заданных в параметрическом виде
Слайд 8Графическое представление уравнений, заданных в полярных координатах
Графическое представление уравнений, заданных в полярных координатах
Слайд 9Оптимизация функций. Классическое решение
Оптимизация функций. Классическое решение
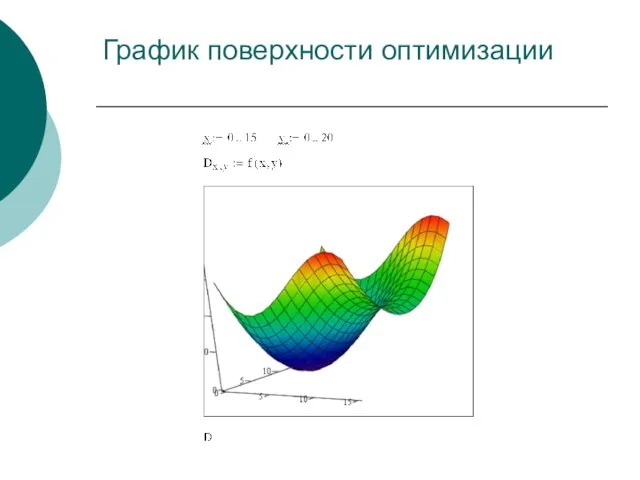
Слайд 10График поверхности оптимизации
График поверхности оптимизации
Слайд 11Контурный график заданной функции оптимизации
Контурный график заданной функции оптимизации

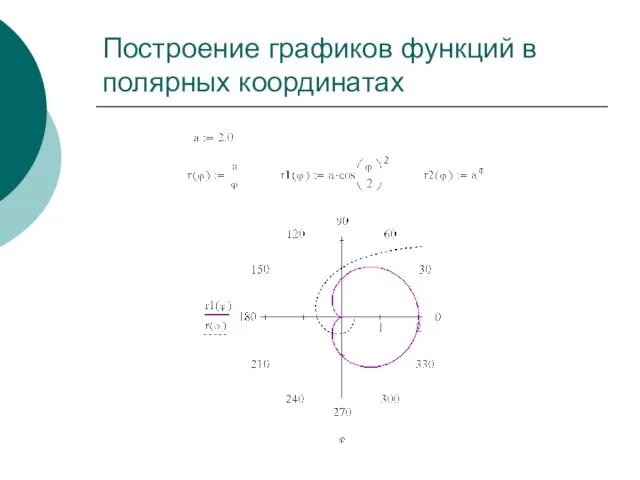
Слайд 12Построение графиков функций в полярных координатах
Построение графиков функций в полярных координатах
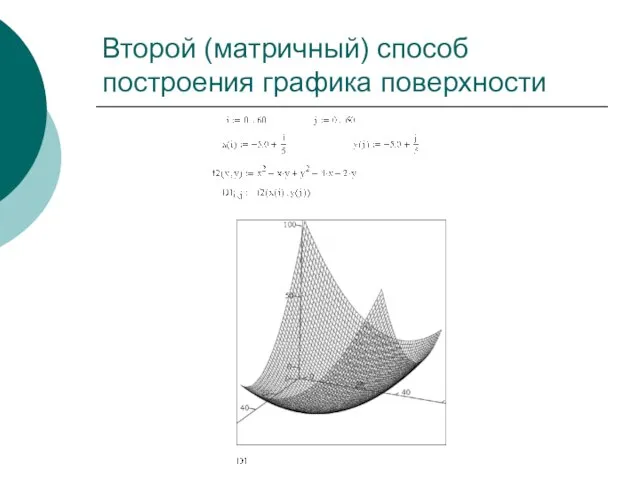
Слайд 13Второй (матричный) способ построения графика поверхности
Второй (матричный) способ построения графика поверхности
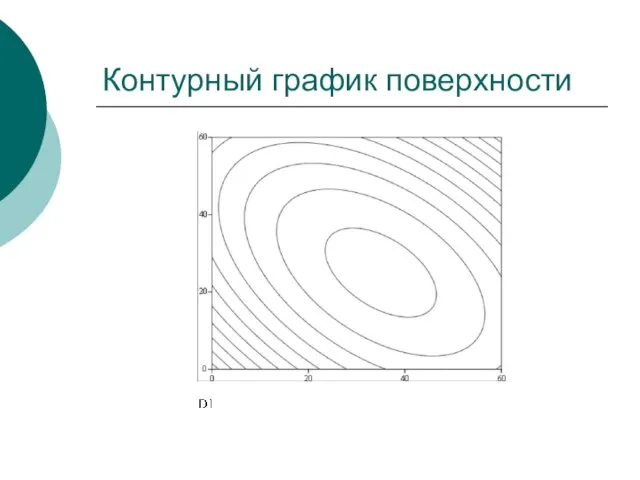
Слайд 14Контурный график поверхности
Контурный график поверхности
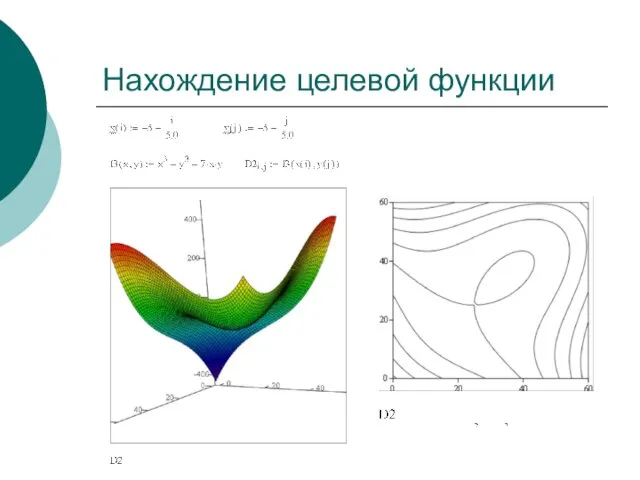
Слайд 15Нахождение целевой функции
Нахождение целевой функции
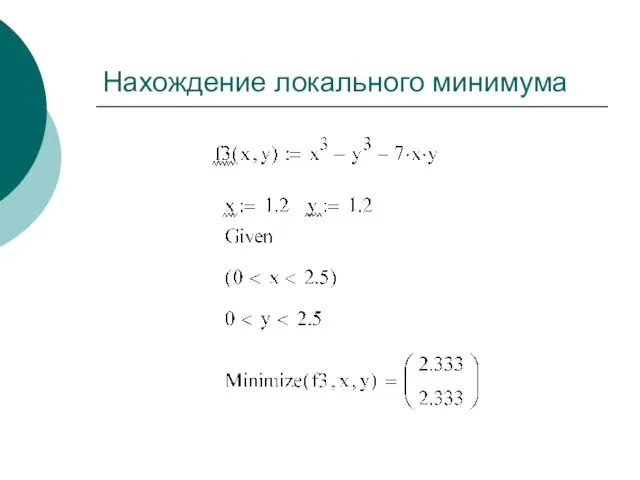
Слайд 16Нахождение локального минимума
Нахождение локального минимума
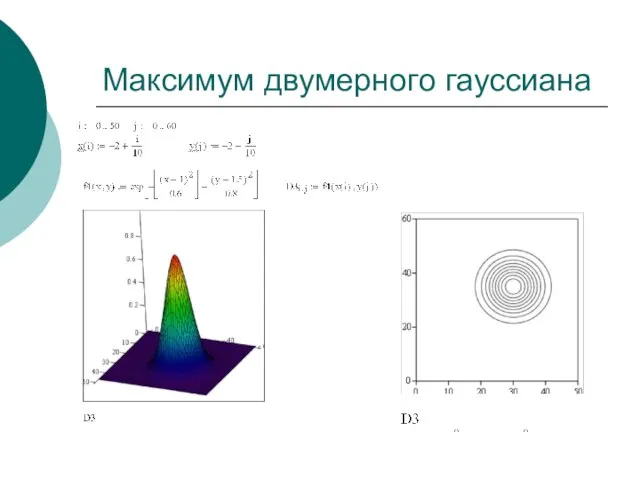
Слайд 17Максимум двумерного гауссиана
Максимум двумерного гауссиана
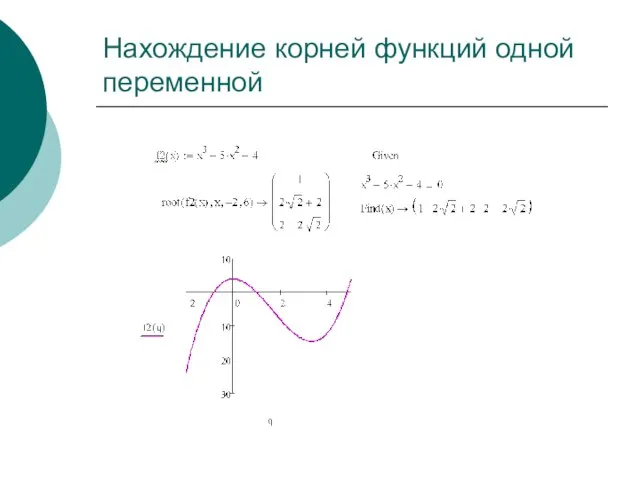
Слайд 18Нахождение корней функций одной переменной
Нахождение корней функций одной переменной
Слайд 19Решение задачи безусловной оптимизации
Р е ш е н и е з
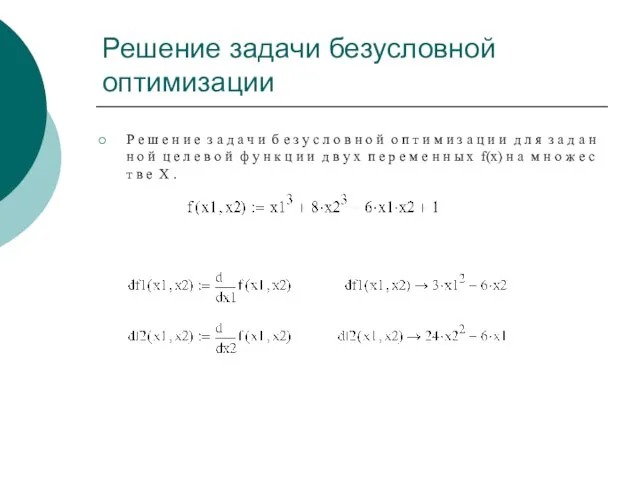
Решение задачи безусловной оптимизации
Р е ш е н и е з
Слайд 20Нахождение стационарных точек
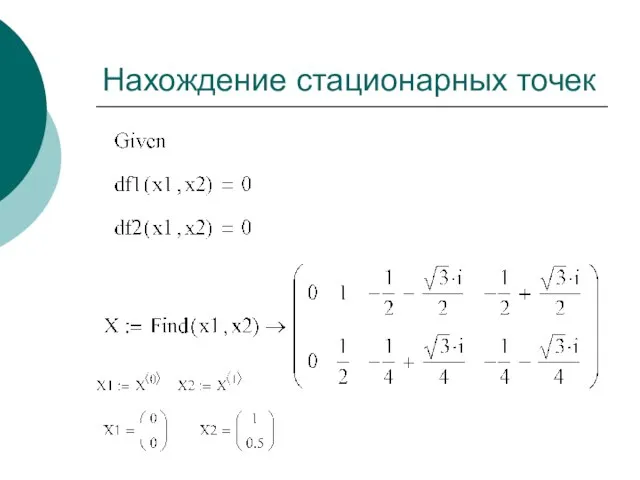
Нахождение стационарных точек
Слайд 21Построение матрицы Гессе
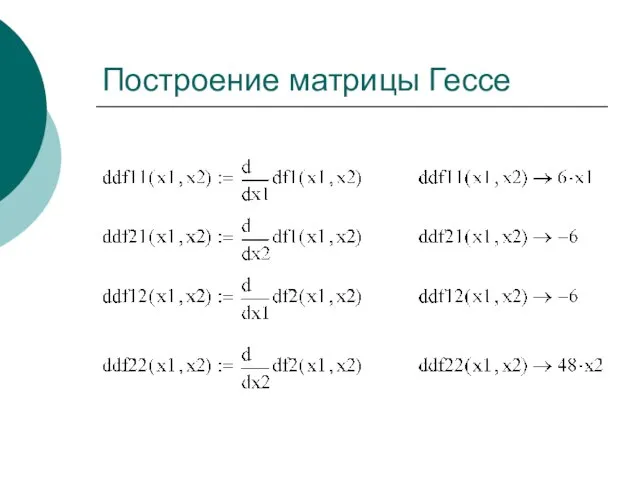
Построение матрицы Гессе
Слайд 22Построение матрицы Гессе (продолжение). Проверка 1 стационарной точки на экстремум
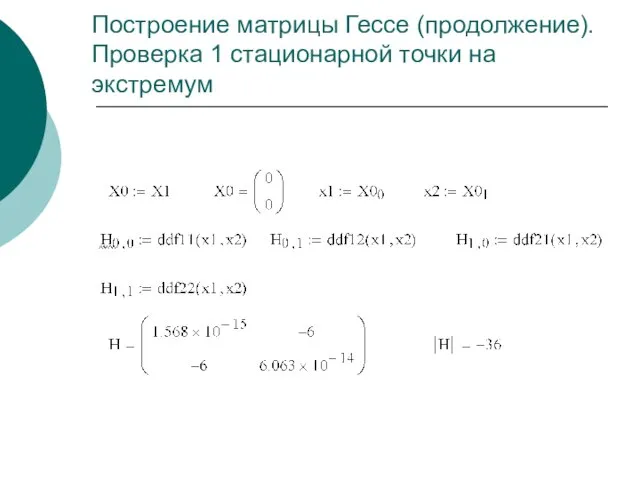
Построение матрицы Гессе (продолжение). Проверка 1 стационарной точки на экстремум
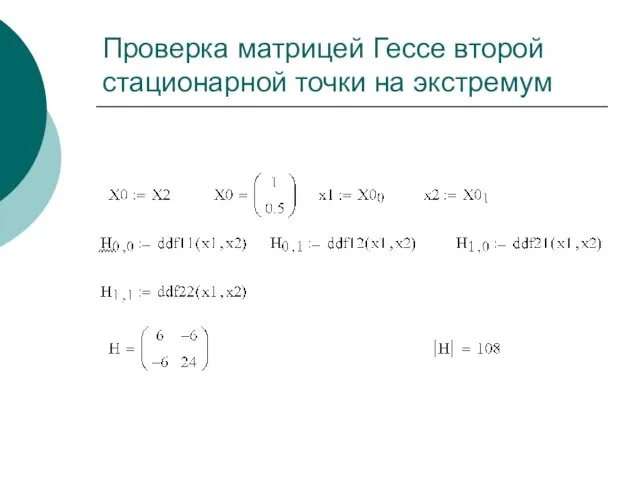
Слайд 23Проверка матрицей Гессе второй стационарной точки на экстремум
Проверка матрицей Гессе второй стационарной точки на экстремум
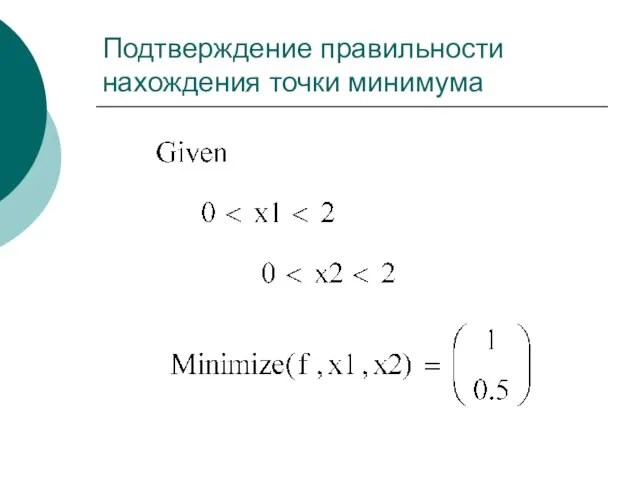
Слайд 24Подтверждение правильности нахождения точки минимума
Подтверждение правильности нахождения точки минимума
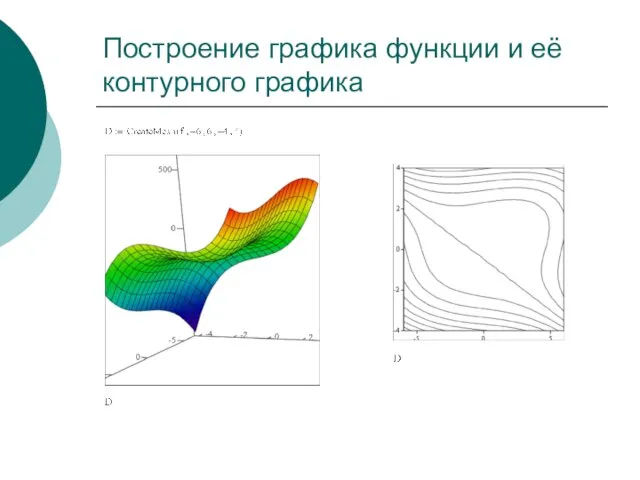
Слайд 25Построение графика функции и её контурного графика
Построение графика функции и её контурного графика
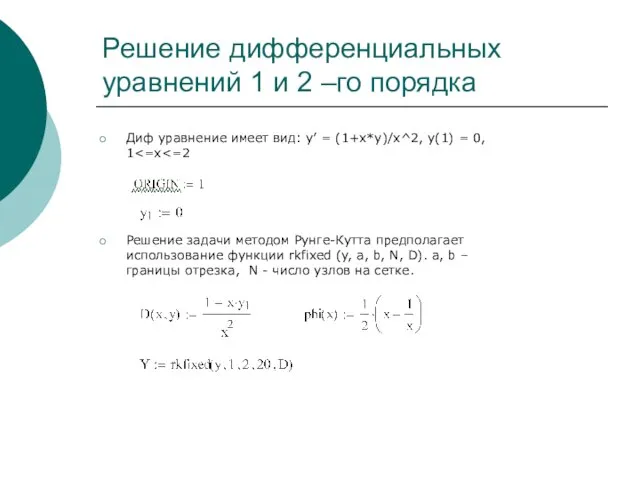
Слайд 26Решение дифференциальных уравнений 1 и 2 –го порядка
Диф уравнение имеет вид: y’
Решение дифференциальных уравнений 1 и 2 –го порядка
Диф уравнение имеет вид: y’
Слайд 27Решение уравнения 1 порядка
Решение уравнения 1 порядка
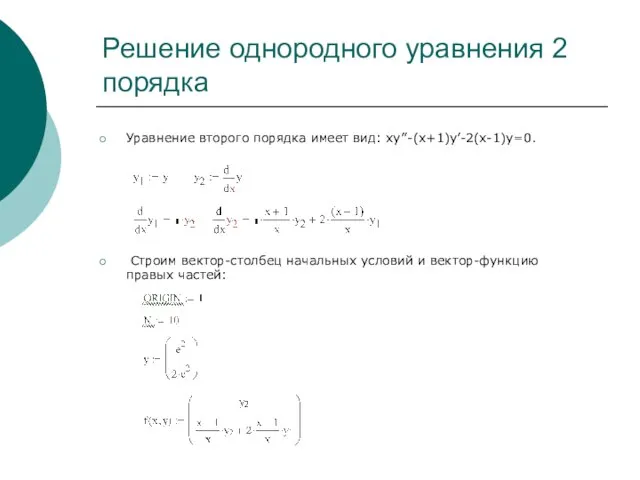
Слайд 28Решение однородного уравнения 2 порядка
Уравнение второго порядка имеет вид: xy’’-(x+1)y’-2(x-1)y=0.
Строим вектор-столбец начальных
Решение однородного уравнения 2 порядка
Уравнение второго порядка имеет вид: xy’’-(x+1)y’-2(x-1)y=0.
Строим вектор-столбец начальных
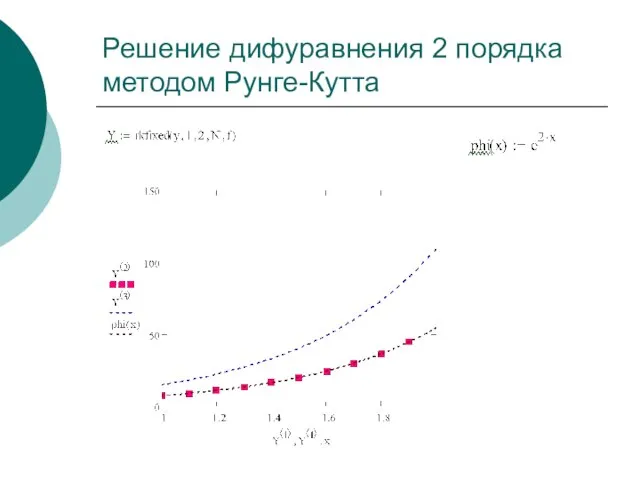
Слайд 29Решение дифуравнения 2 порядка методом Рунге-Кутта
Решение дифуравнения 2 порядка методом Рунге-Кутта
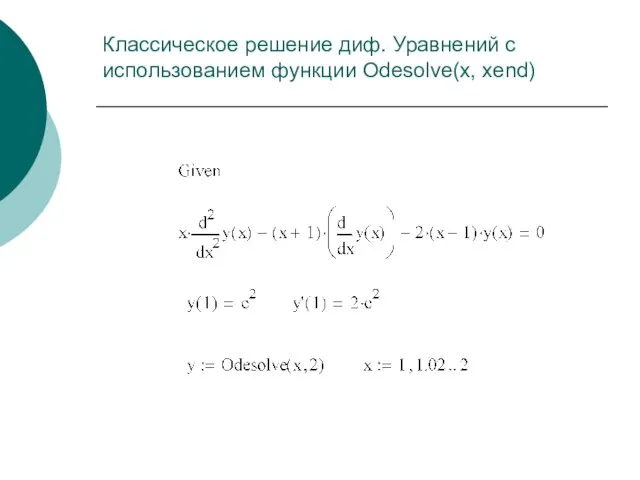
Слайд 30Классическое решение диф. Уравнений с использованием функции Odesolve(x, xend)
Классическое решение диф. Уравнений с использованием функции Odesolve(x, xend)
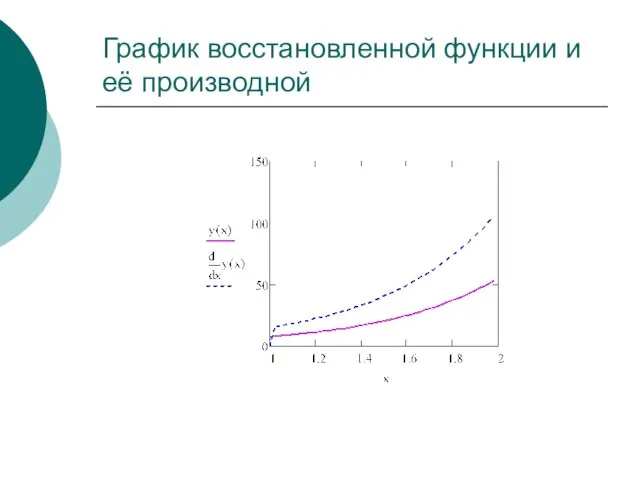
Слайд 31График восстановленной функции и её производной
График восстановленной функции и её производной
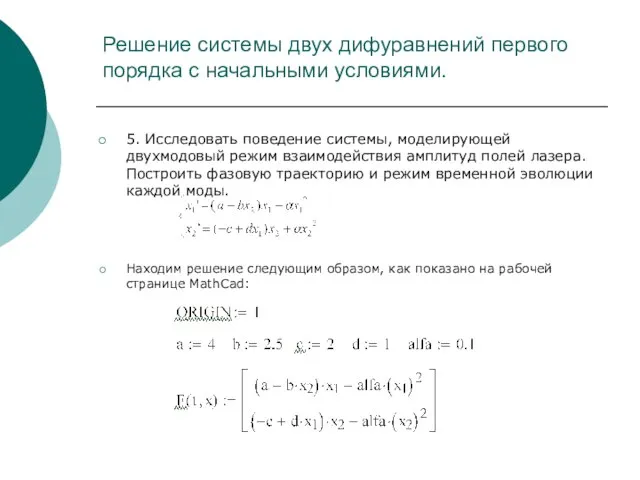
Слайд 32Решение системы двух дифуравнений первого порядка с начальными условиями.
5. Исследовать поведение системы,
Решение системы двух дифуравнений первого порядка с начальными условиями.
5. Исследовать поведение системы,
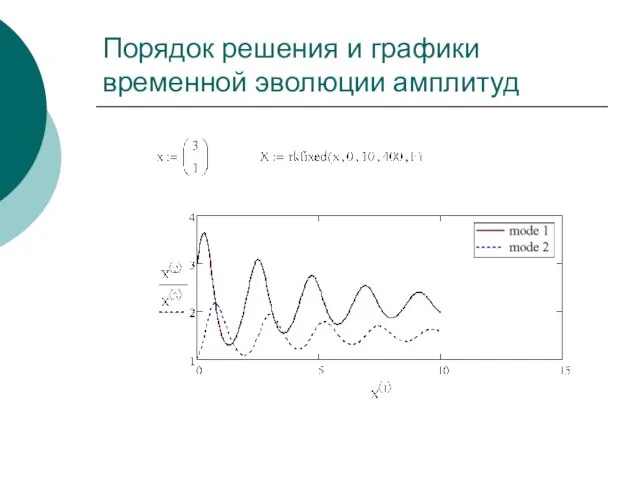
Слайд 33Порядок решения и графики временной эволюции амплитуд
Порядок решения и графики временной эволюции амплитуд
Слайд 34Фазовый портрет системы
Наблюдается устойчивый фокус, соответствующий стабилизации мод и переход их в
Фазовый портрет системы
Наблюдается устойчивый фокус, соответствующий стабилизации мод и переход их в

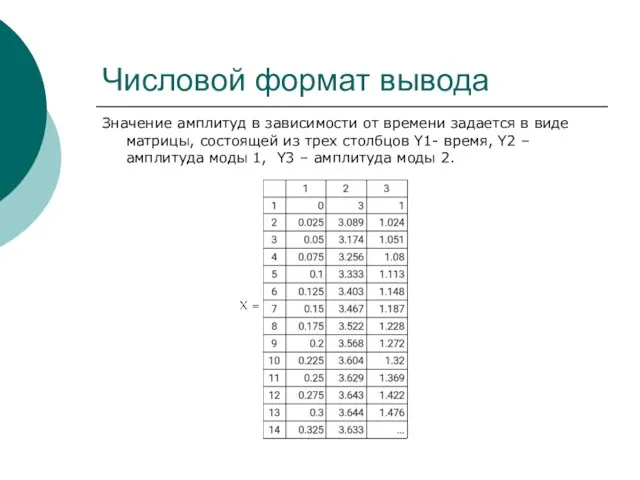
Слайд 35Числовой формат вывода
Значение амплитуд в зависимости от времени задается в виде матрицы,
Числовой формат вывода
Значение амплитуд в зависимости от времени задается в виде матрицы,
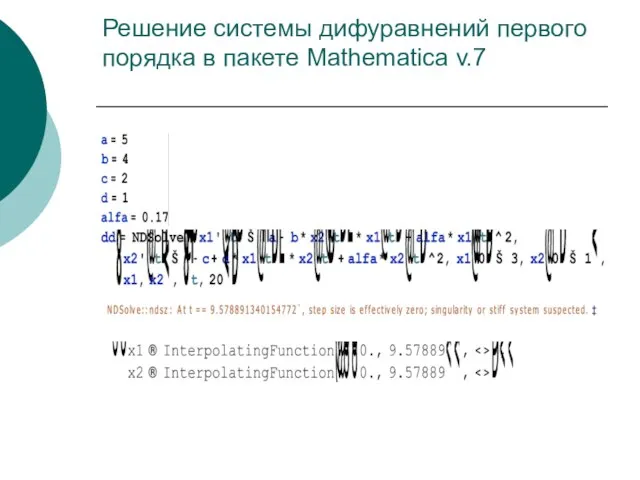
Слайд 36Решение дифуравнений в пакете Mathematica v. 7.
DSolve[{x*y''[x]-(x+1)*y'[x]-2*(x)*y[x]==0,y[1]==e^2,y'[1]==2*e^2},y[x],x]
Решение дифуравнений в пакете Mathematica v. 7.
DSolve[{x*y''[x]-(x+1)*y'[x]-2*(x)*y[x]==0,y[1]==e^2,y'[1]==2*e^2},y[x],x]
![Решение дифуравнений в пакете Mathematica v. 7. DSolve[{x*y''[x]-(x+1)*y'[x]-2*(x)*y[x]==0,y[1]==e^2,y'[1]==2*e^2},y[x],x]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/838338/slide-35.jpg)
Слайд 37График полученной функции
График полученной функции
Слайд 38Решение системы дифуравнений первого порядка в пакете Mathematica v.7
Решение системы дифуравнений первого порядка в пакете Mathematica v.7
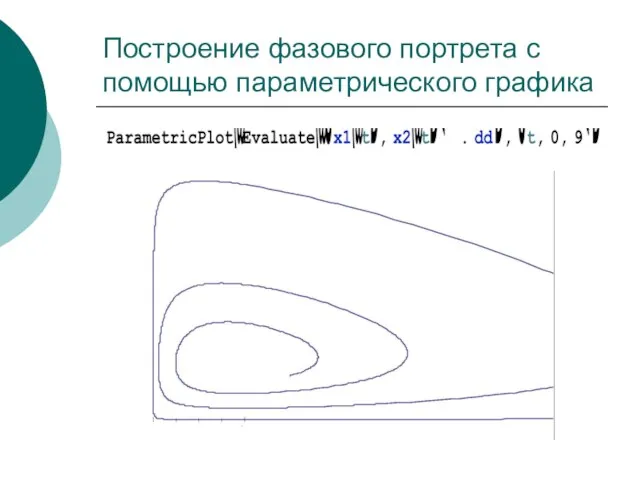
Слайд 39Построение фазового портрета с помощью параметрического графика
Построение фазового портрета с помощью параметрического графика
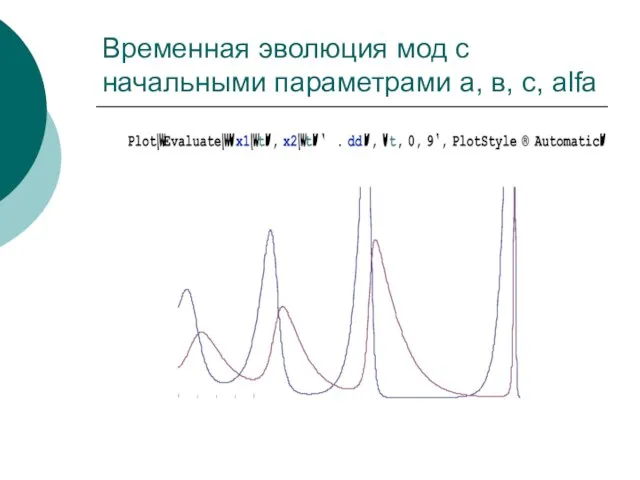
Слайд 40Временная эволюция мод с начальными параметрами а, в, с, alfa
Временная эволюция мод с начальными параметрами а, в, с, alfa
Слайд 41Задание новых параметров задачи
Задание новых параметров задачи
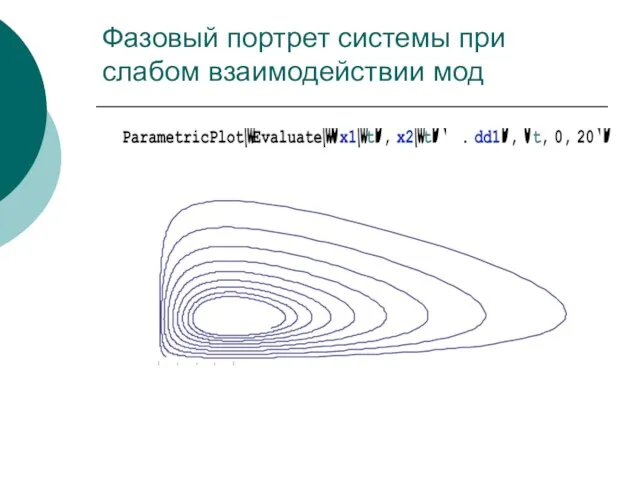
Слайд 42Фазовый портрет системы при слабом взаимодействии мод
Фазовый портрет системы при слабом взаимодействии мод
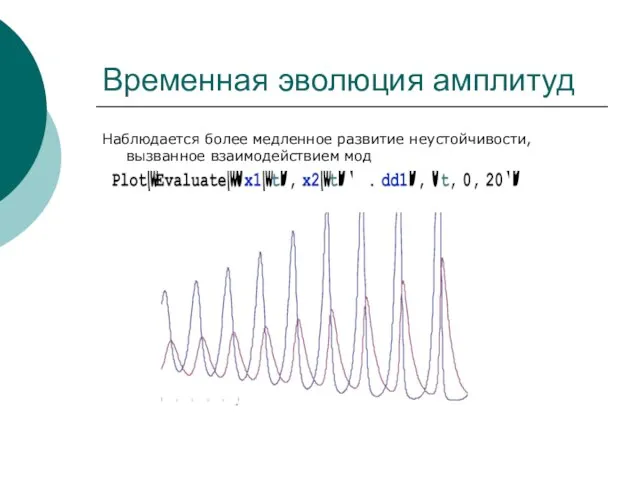
Слайд 43Временная эволюция амплитуд
Наблюдается более медленное развитие неустойчивости, вызванное взаимодействием мод
Временная эволюция амплитуд
Наблюдается более медленное развитие неустойчивости, вызванное взаимодействием мод
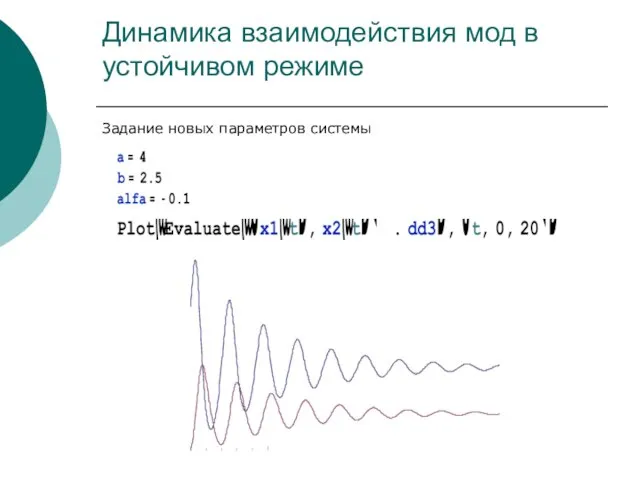
Слайд 44Динамика взаимодействия мод в устойчивом режиме
Задание новых параметров системы
Динамика взаимодействия мод в устойчивом режиме
Задание новых параметров системы
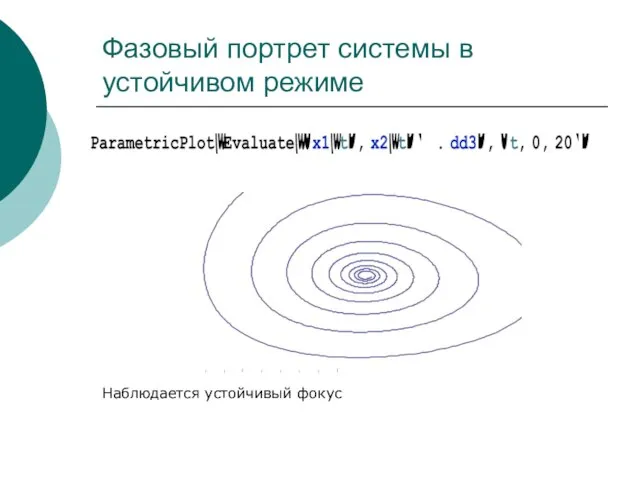
Слайд 45Фазовый портрет системы в устойчивом режиме
Наблюдается устойчивый фокус
Фазовый портрет системы в устойчивом режиме
Наблюдается устойчивый фокус
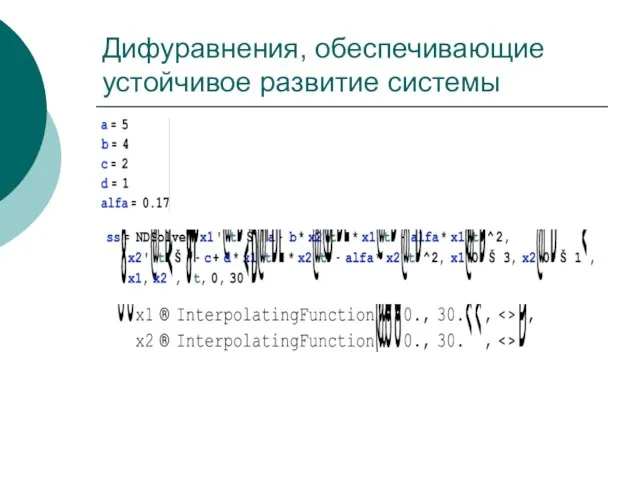
Слайд 46Дифуравнения, обеспечивающие устойчивое развитие системы
Дифуравнения, обеспечивающие устойчивое развитие системы
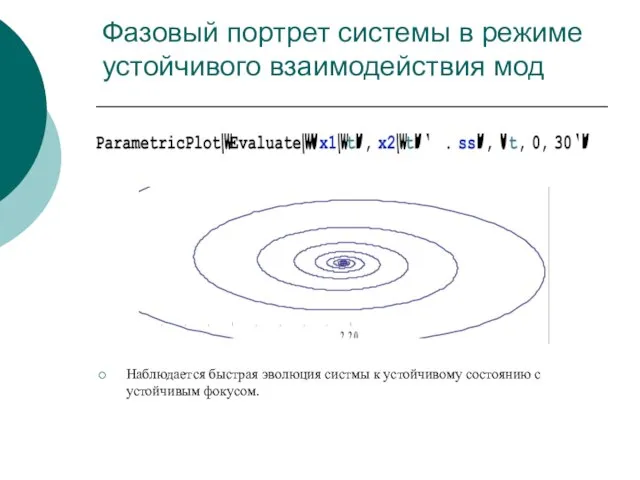
Слайд 47Фазовый портрет системы в режиме устойчивого взаимодействия мод
Наблюдается быстрая эволюция систмы
Фазовый портрет системы в режиме устойчивого взаимодействия мод
Наблюдается быстрая эволюция систмы
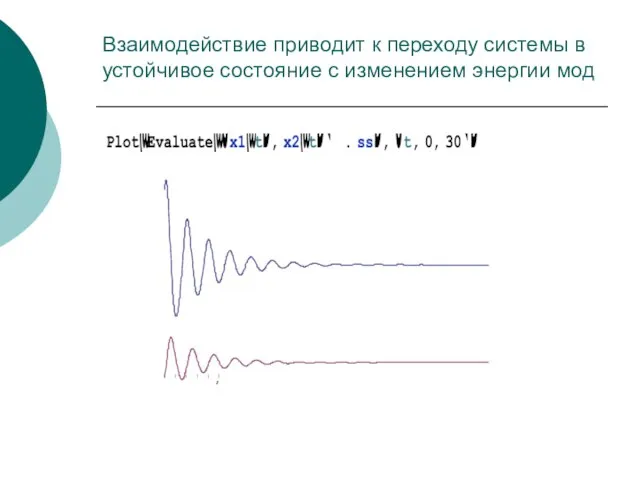
Слайд 48Взаимодействие приводит к переходу системы в устойчивое состояние с изменением энергии мод
Взаимодействие приводит к переходу системы в устойчивое состояние с изменением энергии мод
Слайд 49Решение дифуравнения первого порядка методом Рунге –Кутта -4
Решение дифуравнения первого порядка методом Рунге –Кутта -4
Слайд 50График точного решения
График точного решения
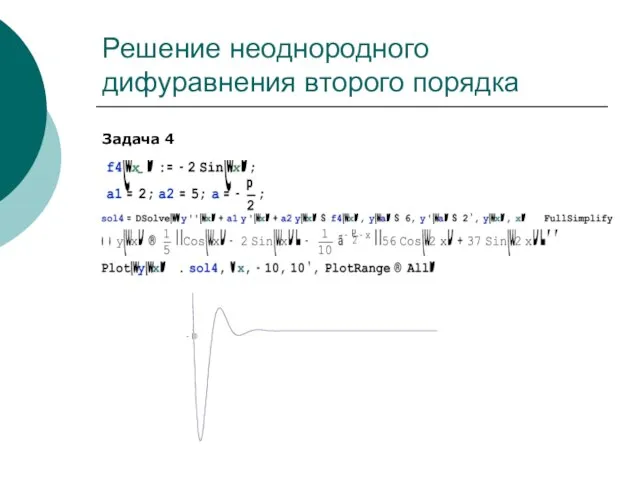
Слайд 51Решение неоднородного дифуравнения второго порядка
Задача 4
Решение неоднородного дифуравнения второго порядка
Задача 4
Слайд 52Аппроксимация эмпирических данных в пакете Maple 12
> X := [1, 2, 3,
Аппроксимация эмпирических данных в пакете Maple 12
> X := [1, 2, 3,
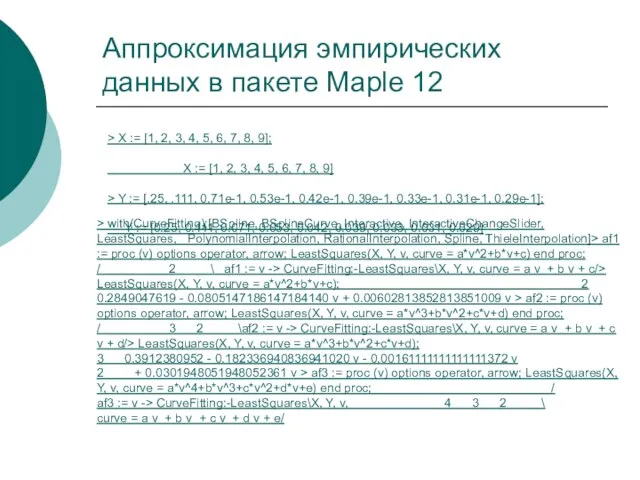
Слайд 53Приближение данных различными аналитическими функциями
af4 := proc (v) options operator, arrow; LeastSquares(X,
Приближение данных различными аналитическими функциями
af4 := proc (v) options operator, arrow; LeastSquares(X,
Слайд 54Графическое представление аппроксимации
Графическое представление аппроксимации
Слайд 55Решение дифуравнения первого порядка методом РК4 в пакете Maple 12
Решение дифуравнения первого порядка методом РК4 в пакете Maple 12
Слайд 56Шаг 0.05
> pf := plot(phi(x), x = 1 .. 2, color =
Шаг 0.05
> pf := plot(phi(x), x = 1 .. 2, color =
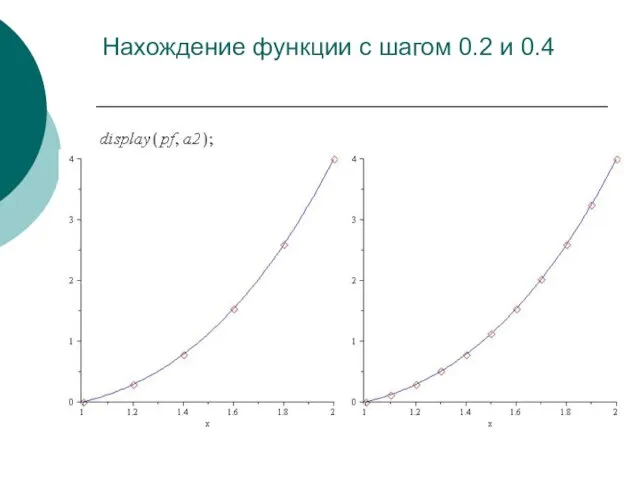
Слайд 57Нахождение функции с шагом 0.2 и 0.4
Нахождение функции с шагом 0.2 и 0.4
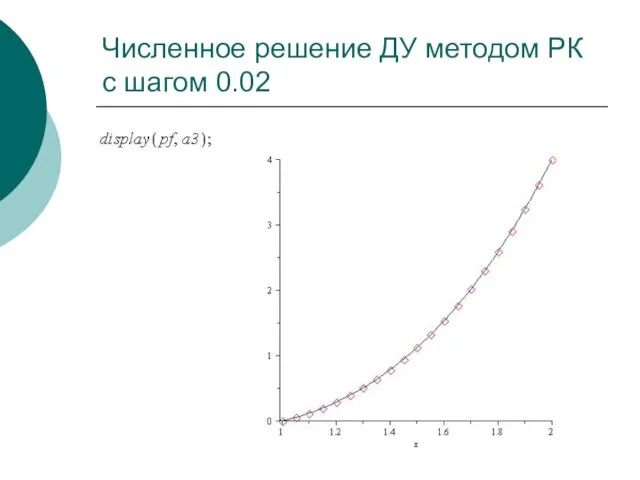
Слайд 58Численное решение ДУ методом РК с шагом 0.02
Численное решение ДУ методом РК с шагом 0.02
Слайд 59Решение ДУ второго порядка методом РК4 сведением к системе двух уравнений первого
Решение ДУ второго порядка методом РК4 сведением к системе двух уравнений первого
Слайд 60Решение неоднородного ДУ второго порядка методом РК4
f := proc (x) options operator,
Решение неоднородного ДУ второго порядка методом РК4
f := proc (x) options operator,
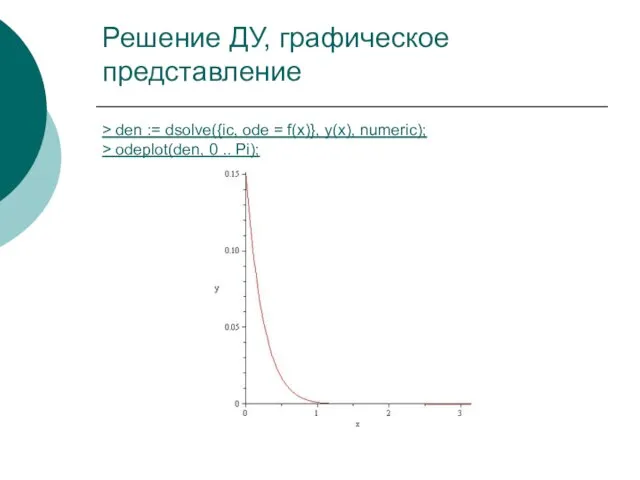
Слайд 61Решение ДУ, графическое представление
> den := dsolve({ic, ode = f(x)}, y(x), numeric);
>
Решение ДУ, графическое представление
> den := dsolve({ic, ode = f(x)}, y(x), numeric);
>
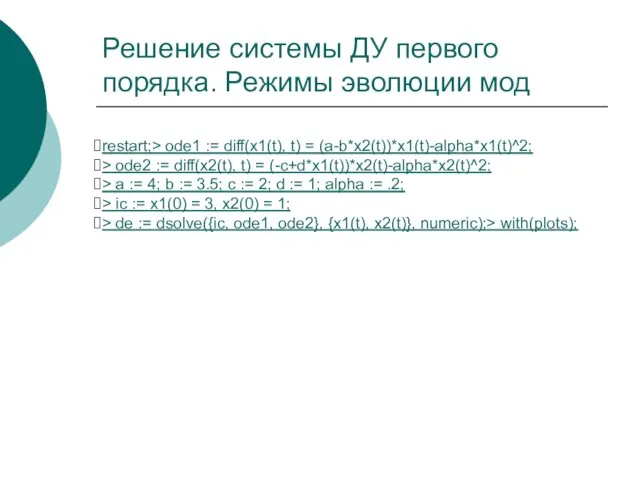
Слайд 62Решение системы ДУ первого порядка. Режимы эволюции мод
restart;> ode1 := diff(x1(t), t)
Решение системы ДУ первого порядка. Режимы эволюции мод
restart;> ode1 := diff(x1(t), t)
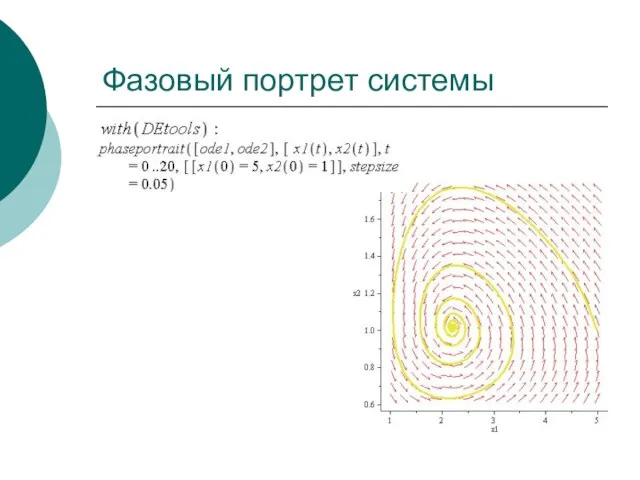
Слайд 63Фазовый портрет системы
Фазовый портрет системы
 Геометрическая прогрессия
Геометрическая прогрессия Прибавление суммы к числу
Прибавление суммы к числу Признаки равенства треугольников
Признаки равенства треугольников Решение планиметрических задач на стереометрических чертежах
Решение планиметрических задач на стереометрических чертежах Использование краеведческого материала на уроках математики
Использование краеведческого материала на уроках математики Тренажёр. Полёт бабочки. (1 класс)
Тренажёр. Полёт бабочки. (1 класс) Градусное измерение углов. Сумма углов в треугольнике. Тест
Градусное измерение углов. Сумма углов в треугольнике. Тест Примеры +7, +8, +9
Примеры +7, +8, +9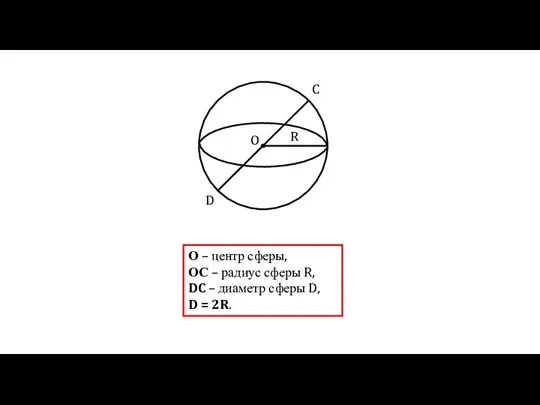 Уравнение сферы
Уравнение сферы Занимательная математика
Занимательная математика Занимательная математика
Занимательная математика Тест по теме: Углы. Параллельные прямые. Перпендикулярные прямые
Тест по теме: Углы. Параллельные прямые. Перпендикулярные прямые Высоты треугольников
Высоты треугольников Практическое применение подобия треугольников
Практическое применение подобия треугольников Применение технологий Веб 2.0 на уроках математики
Применение технологий Веб 2.0 на уроках математики Прямоугольник
Прямоугольник Задачи. Самостоятельная работа
Задачи. Самостоятельная работа Живая планета!
Живая планета! Треугольник. Повторение. Задачи на проверку истинности утверждений
Треугольник. Повторение. Задачи на проверку истинности утверждений Предел последовательности. Практическая работа № 24
Предел последовательности. Практическая работа № 24 Иррациональные уравнения. Основы школьного курса математики
Иррациональные уравнения. Основы школьного курса математики Презентация на тему Окружность, ее центр и радиус
Презентация на тему Окружность, ее центр и радиус  Развёртка параллелепипеда, куба, треугольной и четырёхугольной пирамиды. 5 класс
Развёртка параллелепипеда, куба, треугольной и четырёхугольной пирамиды. 5 класс Математика. Лекция 7. Приложения производной
Математика. Лекция 7. Приложения производной Показательные неравенства
Показательные неравенства Метод удвоения медианы
Метод удвоения медианы Полет на планету чисел. Открытый урок
Полет на планету чисел. Открытый урок Деление десятичной дроби на натуральное число
Деление десятичной дроби на натуральное число