- Презентация на тему Система координат в пространстве

Содержание
- 2. Вспомним, как определяется координатная(числовая) прямая. Изображаем произвольную прямую; х 0 1 М а Тогда любой точке
- 3. А теперь, что мы подразумеваем под координатной плоскостью. у х 0 1 1 М а b
- 4. x y z 0 1 Ox ⊥ Oy ⊥ Oz Ox – ось абсцисс Oy –
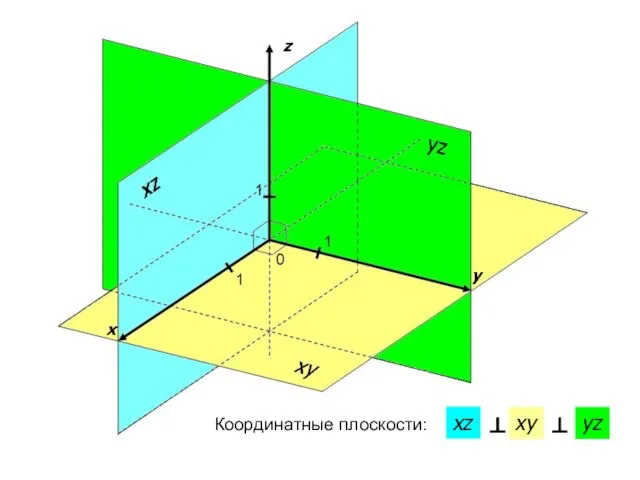
- 5. x y z 0 1 1 1 Координатные плоскости: Oxz Oxy Oyz
- 6. Координатные плоскости: xz ⊥ xy ⊥ yz
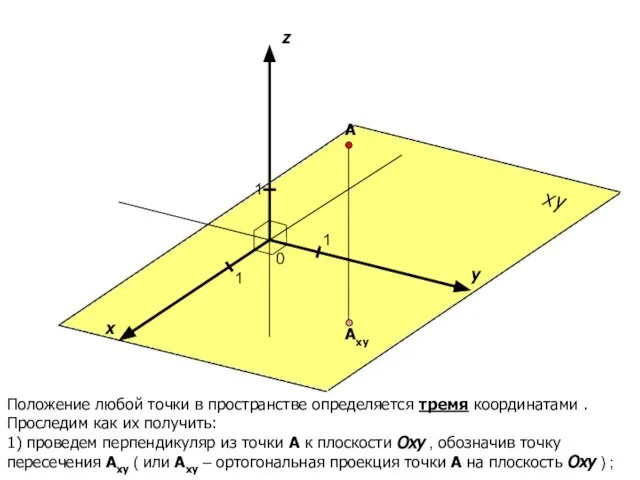
- 7. Положение любой точки в пространстве определяется тремя координатами . Проследим как их получить: 1) проведем перпендикуляр
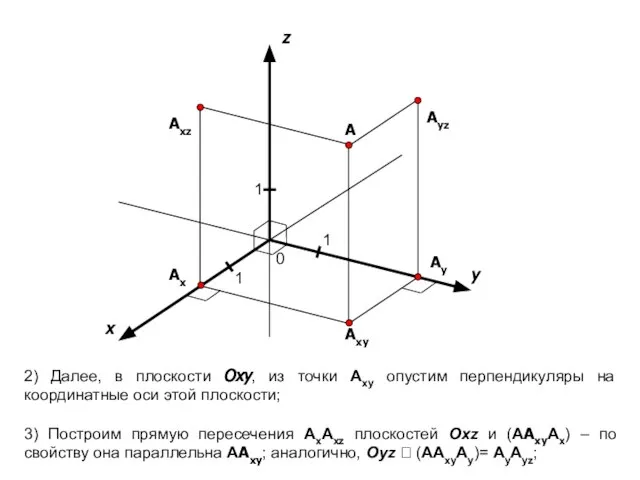
- 8. x y 1 1 A Ayz Axz Axy Ax Ay z 1 2) Далее, в плоскости
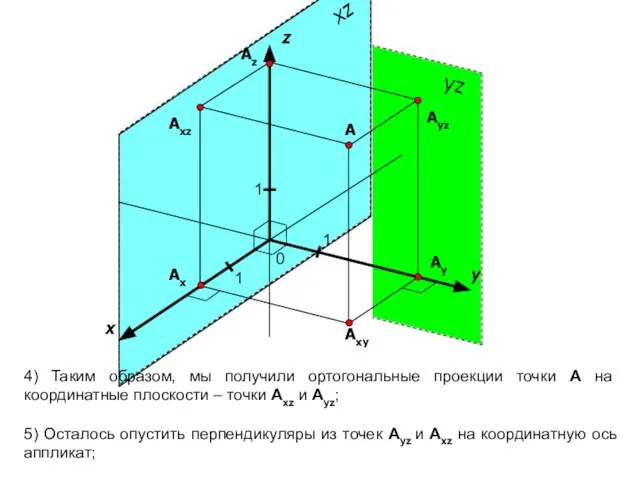
- 9. x y 1 1 A Ayz Axz Axy Ax Ay z 1 4) Таким образом, мы
- 10. x y 0 1 1 1 A Ayz Axz Axy Ax Az Ay z Тогда, AAx
- 11. x y 0 1 1 1 A Ayz Axz Axy Ax Az Ay z Координаты точки
- 12. 1 x y z 0 1 1 2 3 2 Пример 1. Изобразить точки A(1; 2;
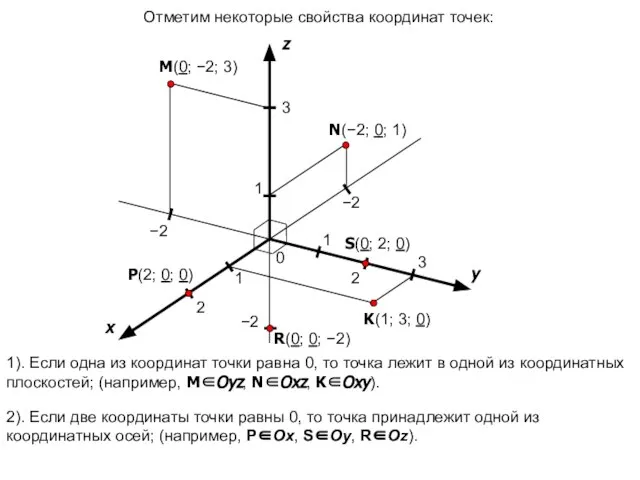
- 13. x y z 0 1 1 A 1 2 3 2 A(1; 2; 3) B −2
- 14. 1). Если одна из координат точки равна 0, то точка лежит в одной из координатных плоскостей;
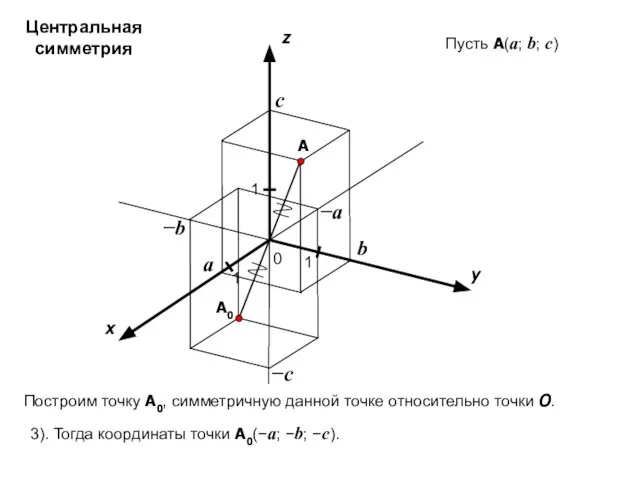
- 15. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −a
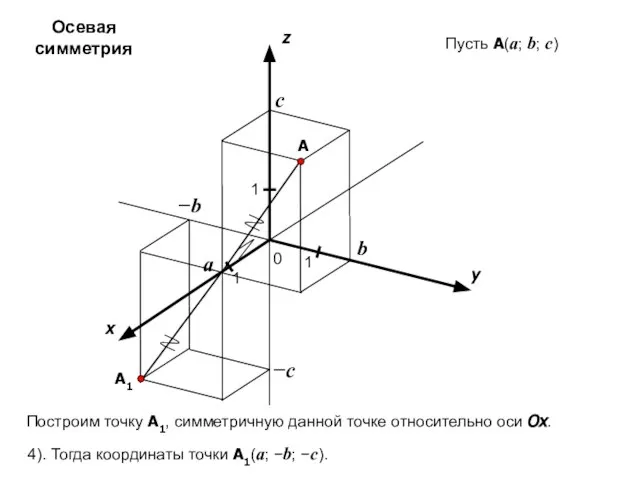
- 16. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −c
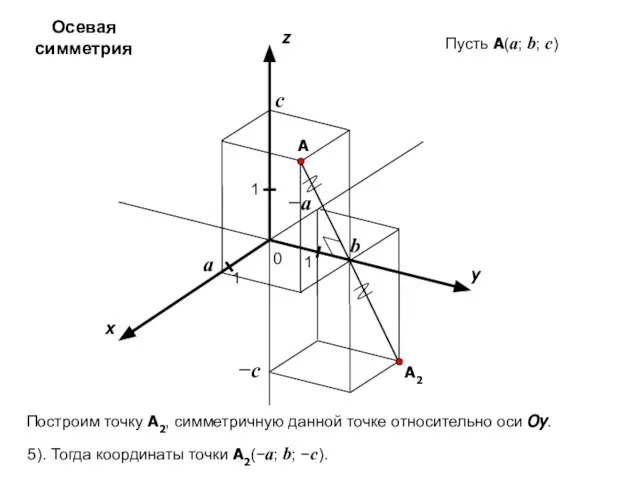
- 17. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −c
- 18. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −a
- 19. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −c
- 20. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) −b
- 21. x y z 0 1 1 A 1 a b c Пусть A(a; b; c) A6
- 22. x y 0 1 1 A z 1 Расстояние между точками A(x1; y1; z1) и B(x2;
- 24. Скачать презентацию
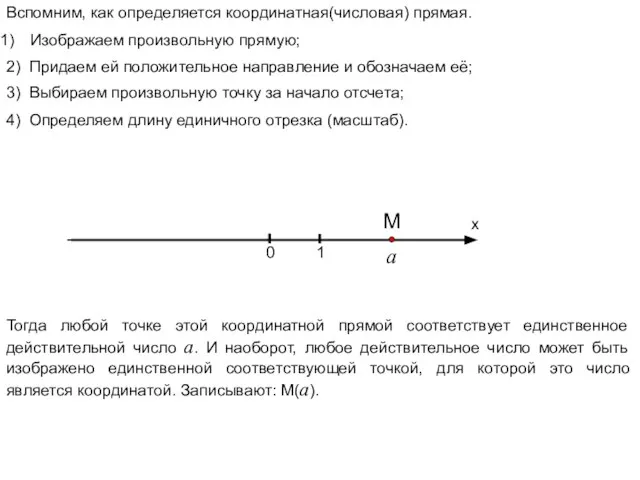
Слайд 2Вспомним, как определяется координатная(числовая) прямая.
Изображаем произвольную прямую;
х
0
1
М
а
Тогда любой точке этой координатной прямой
Вспомним, как определяется координатная(числовая) прямая.
Изображаем произвольную прямую;
х
0
1
М
а
Тогда любой точке этой координатной прямой
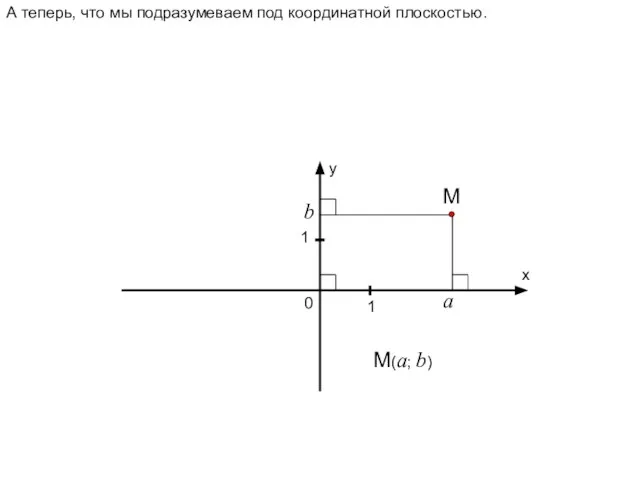
Слайд 3А теперь, что мы подразумеваем под координатной плоскостью.
у
х
0
1
1
М
а
b
M(a; b)
А теперь, что мы подразумеваем под координатной плоскостью.
у
х
0
1
1
М
а
b
M(a; b)
Слайд 4x
y
z
0
1
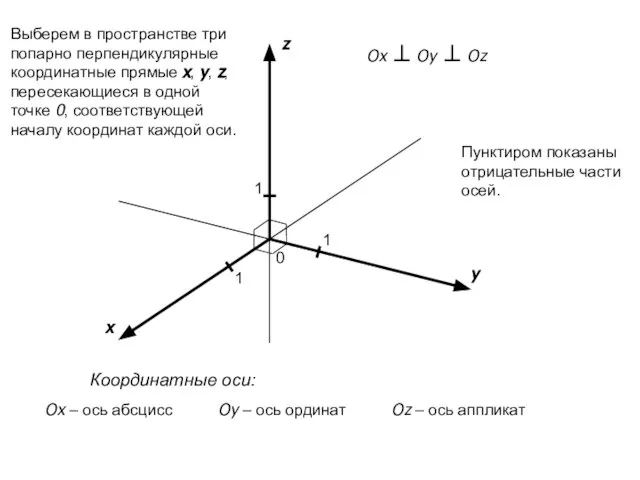
Ox ⊥ Oy ⊥ Oz
Ox – ось абсцисс
Oy – ось ординат
Oz –
x
y
z
0
1
Ox ⊥ Oy ⊥ Oz
Ox – ось абсцисс
Oy – ось ординат
Oz –
Слайд 5x
y
z
0
1
1
1
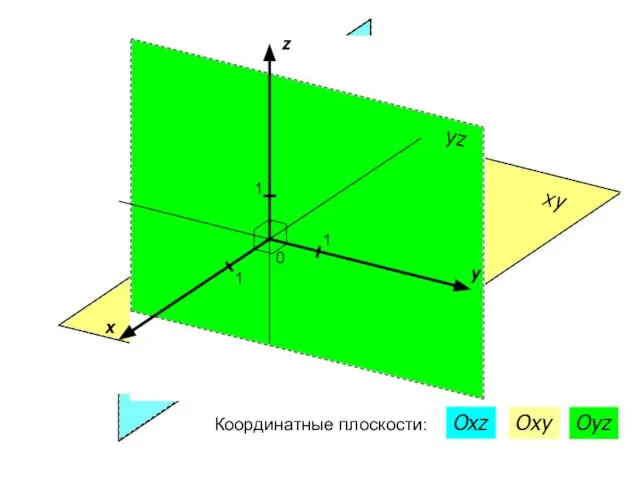
Координатные плоскости:
Oxz
Oxy
Oyz
x
y
z
0
1
1
1
Координатные плоскости:
Oxz
Oxy
Oyz
Слайд 6 Координатные плоскости:
xz
⊥
xy
⊥
yz
Координатные плоскости:
xz
⊥
xy
⊥
yz
Слайд 7Положение любой точки в пространстве определяется тремя координатами . Проследим как их
Положение любой точки в пространстве определяется тремя координатами . Проследим как их
Слайд 8x
y
1
1
A
Ayz
Axz
Axy
Ax
Ay
z
1
2) Далее, в плоскости Oxy, из точки Axy опустим перпендикуляры на координатные
x
y
1
1
A
Ayz
Axz
Axy
Ax
Ay
z
1
2) Далее, в плоскости Oxy, из точки Axy опустим перпендикуляры на координатные
Слайд 9x
y
1
1
A
Ayz
Axz
Axy
Ax
Ay
z
1
4) Таким образом, мы получили ортогональные проекции точки A на координатные плоскости
x
y
1
1
A
Ayz
Axz
Axy
Ax
Ay
z
1
4) Таким образом, мы получили ортогональные проекции точки A на координатные плоскости
Слайд 10x
y
0
1
1
1
A
Ayz
Axz
Axy
Ax
Az
Ay
z
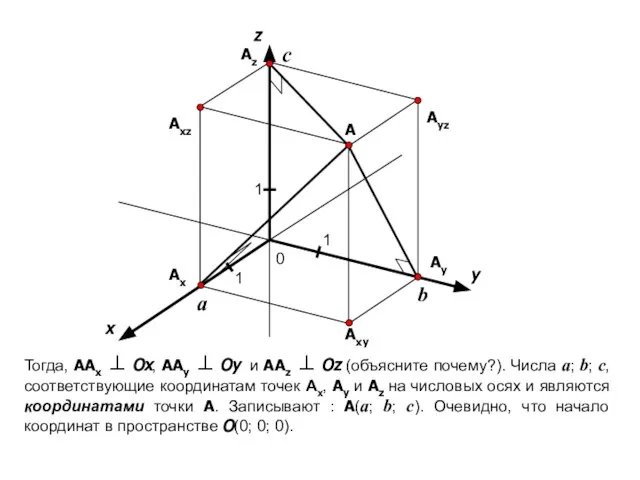
Тогда, AAx ⊥ Ox, AAy ⊥ Oy и AAz ⊥ Oz (объясните
x
y
0
1
1
1
A
Ayz
Axz
Axy
Ax
Az
Ay
z
Тогда, AAx ⊥ Ox, AAy ⊥ Oy и AAz ⊥ Oz (объясните
Слайд 11x
y
0
1
1
1
A
Ayz
Axz
Axy
Ax
Az
Ay
z
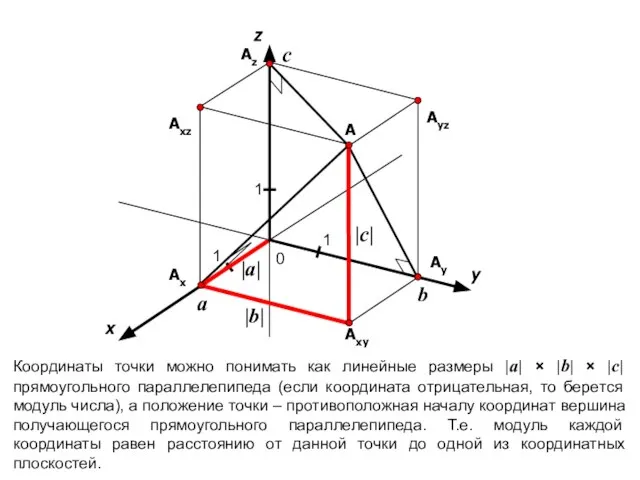
Координаты точки можно понимать как линейные размеры |a| × |b| × |c|
x
y
0
1
1
1
A
Ayz
Axz
Axy
Ax
Az
Ay
z
Координаты точки можно понимать как линейные размеры |a| × |b| × |c|
Слайд 121
x
y
z
0
1
1
2
3
2
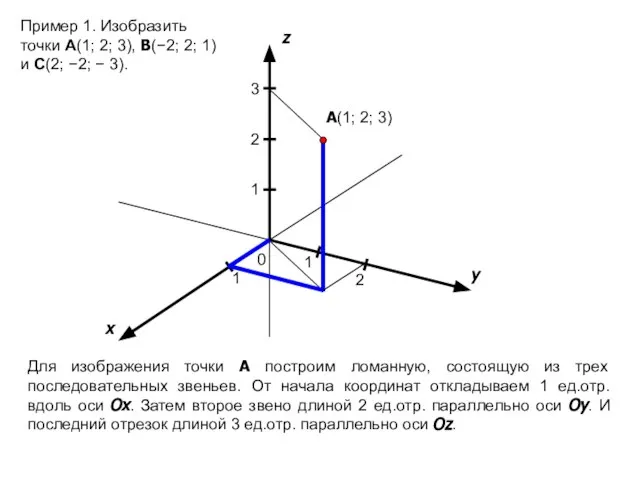
Пример 1. Изобразить точки A(1; 2; 3), B(−2; 2; 1) и C(2;
1
x
y
z
0
1
1
2
3
2
Пример 1. Изобразить точки A(1; 2; 3), B(−2; 2; 1) и C(2;
Слайд 13x
y
z
0
1
1
A
1
2
3
2
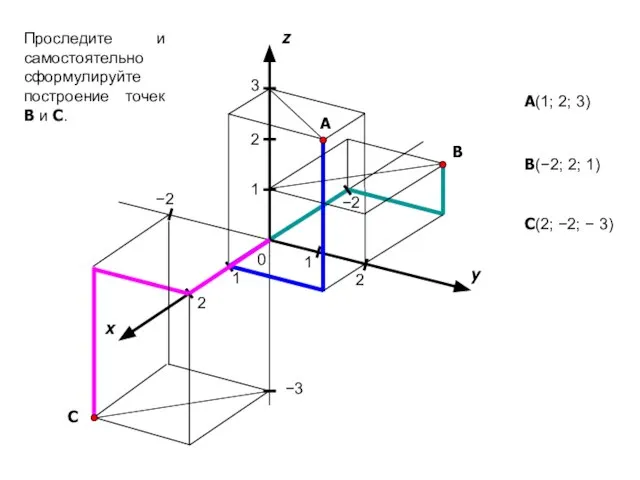
A(1; 2; 3)
B
−2
B(−2; 2; 1)
C(2; −2; − 3)
C
−2
2
−3
Проследите и самостоятельно сформулируйте построение
x
y
z
0
1
1
A
1
2
3
2
A(1; 2; 3)
B
−2
B(−2; 2; 1)
C(2; −2; − 3)
C
−2
2
−3
Проследите и самостоятельно сформулируйте построение
Слайд 141). Если одна из координат точки равна 0, то точка лежит в
1). Если одна из координат точки равна 0, то точка лежит в
Слайд 15x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−a
−b
−c
A0
Построим точку A0, симметричную данной точке относительно точки O.
3).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−a
−b
−c
A0
Построим точку A0, симметричную данной точке относительно точки O.
3).
Слайд 16x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
−b
A1
Построим точку A1, симметричную данной точке относительно оси Ox.
4).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
−b
A1
Построим точку A1, симметричную данной точке относительно оси Ox.
4).
Слайд 17x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
−a
A2
Построим точку A2, симметричную данной точке относительно оси Oy.
5).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
−a
A2
Построим точку A2, симметричную данной точке относительно оси Oy.
5).
Слайд 18x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−a
−b
A3
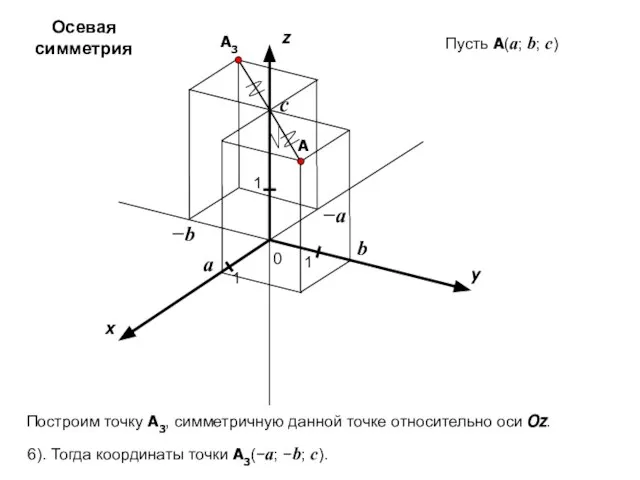
Построим точку A3, симметричную данной точке относительно оси Oz.
6).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−a
−b
A3
Построим точку A3, симметричную данной точке относительно оси Oz.
6).
Слайд 19x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
A4
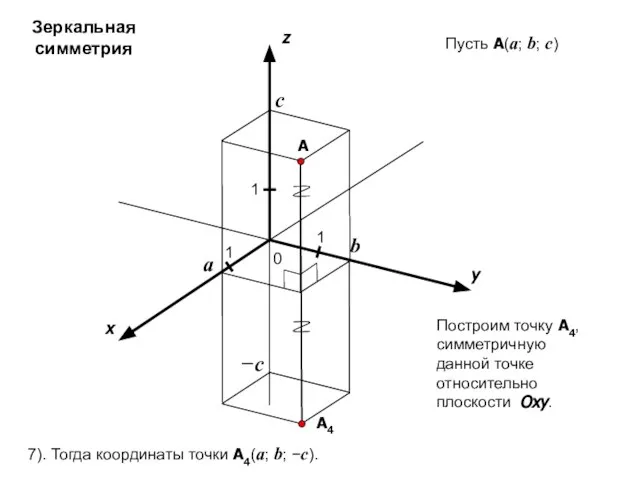
Построим точку A4, симметричную данной точке относительно плоскости Oxy.
7).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−c
A4
Построим точку A4, симметричную данной точке относительно плоскости Oxy.
7).
Слайд 20x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−b
A5
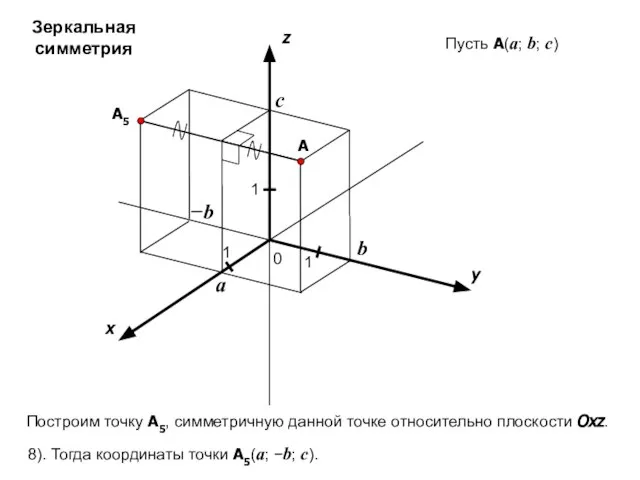
Построим точку A5, симметричную данной точке относительно плоскости Oxz.
8).
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
−b
A5
Построим точку A5, симметричную данной точке относительно плоскости Oxz.
8).
Слайд 21x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
A6
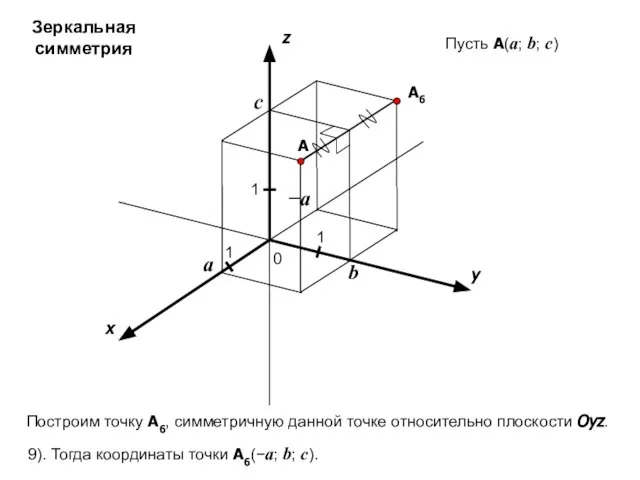
9). Тогда координаты точки A6(−a; b; c).
Зеркальная симметрия
Построим точку
x
y
z
0
1
1
A
1
a
b
c
Пусть A(a; b; c)
A6
9). Тогда координаты точки A6(−a; b; c).
Зеркальная симметрия
Построим точку
Слайд 22x
y
0
1
1
A
z
1
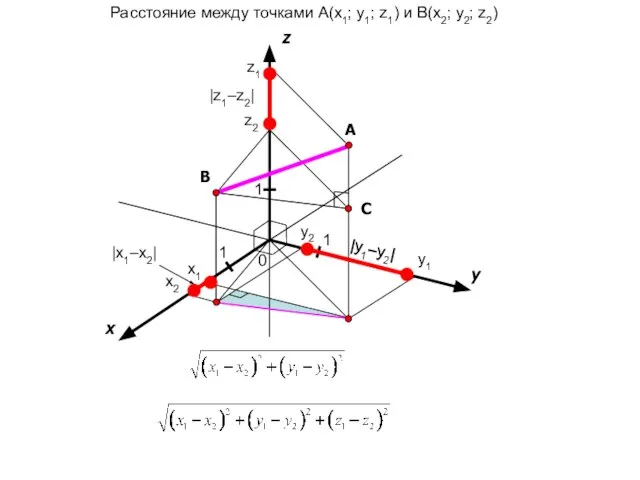
Расстояние между точками A(x1; y1; z1) и B(x2; y2; z2)
B
x1
x2
y1
y2
z1
z2
|x1–x2|
|y1–y2|
|z1–z2|
C
x
y
0
1
1
A
z
1
Расстояние между точками A(x1; y1; z1) и B(x2; y2; z2)
B
x1
x2
y1
y2
z1
z2
|x1–x2|
|y1–y2|
|z1–z2|
C
 Презентация на тему Сечения многогранников
Презентация на тему Сечения многогранников  Приближенные значения чисел. Округление чисел
Приближенные значения чисел. Округление чисел Окружность и круг. Решение задач. 7 класс
Окружность и круг. Решение задач. 7 класс Презентация на тему Математический КВН 8 класс
Презентация на тему Математический КВН 8 класс  Пересечение высот
Пересечение высот Решение уравнений (2 класс)
Решение уравнений (2 класс) Функция нескольких переменных
Функция нескольких переменных Пересечение поверхностей. Лекция 8
Пересечение поверхностей. Лекция 8 Решение текстовых задач. Устный счёт. Заселяем домики
Решение текстовых задач. Устный счёт. Заселяем домики Интегрирование заменой переменной
Интегрирование заменой переменной Понятия и свойства функции. Предел функции. Теоремы о пределах. Нахождение пределов функций
Понятия и свойства функции. Предел функции. Теоремы о пределах. Нахождение пределов функций Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ
Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ  Приёмы вычитания и сложения
Приёмы вычитания и сложения Задачи на расстояние
Задачи на расстояние Параллельность прямых и плоскостей в пространстве с решением
Параллельность прямых и плоскостей в пространстве с решением Оптимизация элементов треугольника при решении задачи Как поспорили Иван Иванович с Иваном Никифоровичем
Оптимизация элементов треугольника при решении задачи Как поспорили Иван Иванович с Иваном Никифоровичем Устный счет на уроках математики в 9 классе по подготовке к экзаменам в форме ОГЭ
Устный счет на уроках математики в 9 классе по подготовке к экзаменам в форме ОГЭ Способы построения параллельных прямых
Способы построения параллельных прямых Сведения об объеме эфирного времени, затраченного на освещение деятельности политических партий в июле 2020 года
Сведения об объеме эфирного времени, затраченного на освещение деятельности политических партий в июле 2020 года Аксонометрические проекции
Аксонометрические проекции Параллелограмм и трапеция. Урок 8
Параллелограмм и трапеция. Урок 8 Теория графов. Основные понятия. Лекция 6
Теория графов. Основные понятия. Лекция 6 Тела вращения
Тела вращения Задачи и примеры по математике
Задачи и примеры по математике Теорема Фалеса
Теорема Фалеса Луч и угол. 2 класс
Луч и угол. 2 класс Логические выражения
Логические выражения Круглые числа
Круглые числа