- Программное обеспечение конроллеров. Алгоблоки

Содержание
- 2. Правила: 1. любой алгоритм можно помещать в любой алгоблок 2. один и тот же алгоритм можно
- 3. Конфигурирование В процессе конфигурирования для каждого входа каждого алгоблока задается источник сигнала. Каждый вход алгоблока может
- 4. Вход считается связанным, если он соединен с входами какого-либо алгоблока, в противном случае вход считается свободным.
- 5. Отличие между константами и коэффициентами заключается в возможности их изменения: константы могут устанавливать и изменять только
- 6. Т.е. задача конфигурирования сводится к след. 3-х операциям: 1. определяется, должен ли каждый вход алгоблока быть
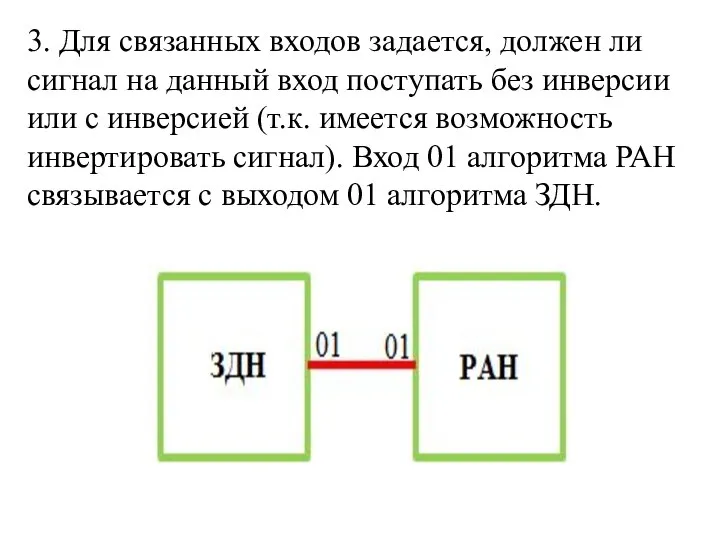
- 7. 3. Для связанных входов задается, должен ли сигнал на данный вход поступать без инверсии или с
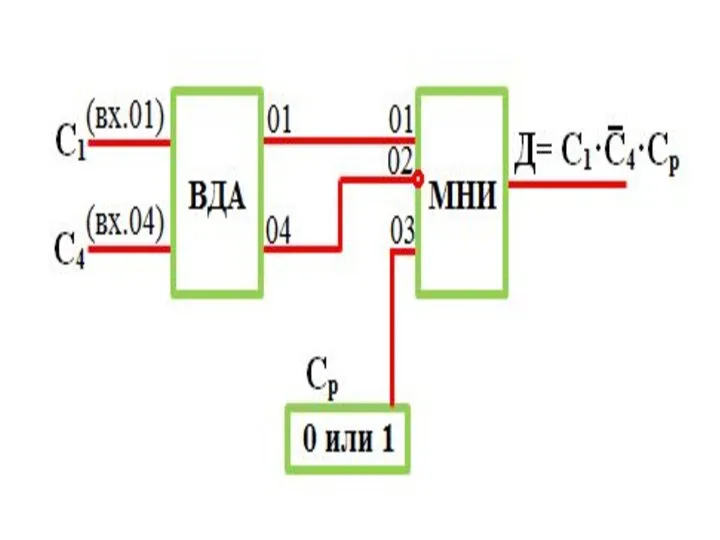
- 8. Для подключения к дискретным входам контроллера используется алгоритм ВДА (ввод дискретных сигналов гр. А). Входы 01
- 10. Аналоговые сигналы формируются на выходе таких алгоритмов как регуляторы, сумматоры, задатчики, интеграторы и т.д. Несмотря на
- 11. Это позволяет например, складывать два числа, каждое из которых равно 90% и на выходе сумматора получать
- 12. Обратный счет и безударность При решении задач автоматического регулирования возникает необходимость включать, выключать или переключать контур
- 13. В контроллере можно реализовать два вида балансировки – статическую и динамическую. При статической балансировке отслеживаемый сигнал
- 14. Вид балансировки зависит от используемых алгоритмов. Так интегратор выключает статическую балансировку, алгоритм задания – любую из
- 15. Если цепочка алгоритмов, содержащая алгоритмы (т.е. алгоритмы, способные отслеживать и запоминать начальные условия) отключена и сигнал
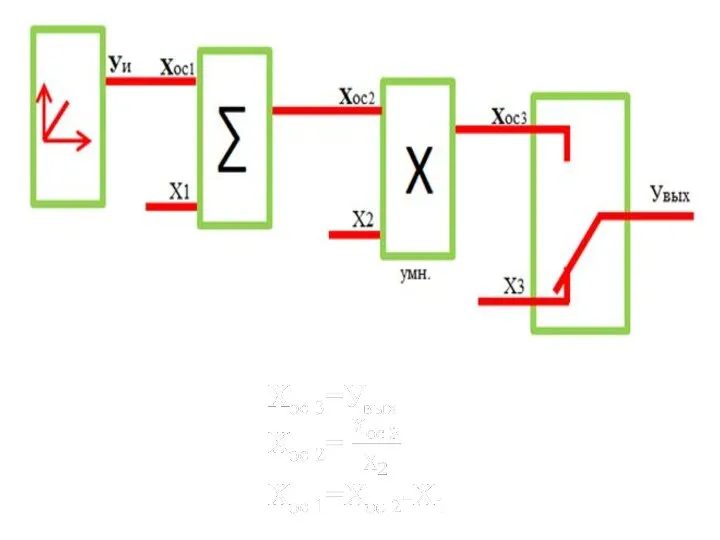
- 16. Следящий алгоритм отслеживает сигнал Xос, рассчитанный алгоритм, включенным после следящего алгоритма. В результате включение отключенной цепочки
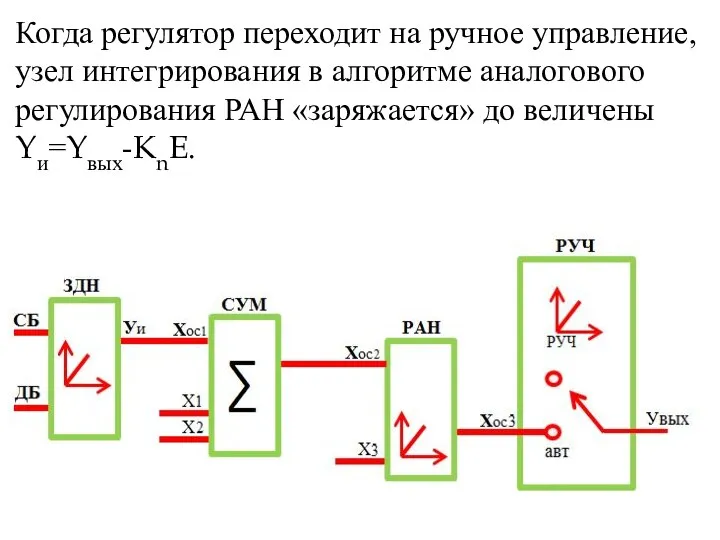
- 18. Когда регулятор переходит на ручное управление, узел интегрирования в алгоритме аналогового регулирования РАН «заряжается» до величены
- 19. Если в задатчике ЗДН балансировка отсутствует (СБ=ДБ=0), то переход на режим автоматического управления произойдет безударно, при
- 20. Если же в алгоритме ЗДН включена статическая и динамическая балансировка, то в ручном режиме не только
- 21. В этом случае после перехода на автоматический режим в первый момент установится нулевое значение рассогласования. При
- 22. Условия безударности 1. Если в отключенной цепи имеется алгоритм из группы следящих алгоритмов, который в состоянии
- 23. К группе следящих относятся алгоритмы: - аналоговые рег. РАН - имп. РИН - интегр. ИНТ -
- 24. Если на вход С поступает дискретный сигнал С=1, переключатель отключает интегратор, при этом на входе Х1
- 26. Скачать презентацию
Слайд 3Конфигурирование
В процессе конфигурирования для каждого входа каждого алгоблока задается источник сигнала. Каждый
Конфигурирование
В процессе конфигурирования для каждого входа каждого алгоблока задается источник сигнала. Каждый
Слайд 4Вход считается связанным, если он соединен с входами какого-либо алгоблока, в противном
Вход считается связанным, если он соединен с входами какого-либо алгоблока, в противном
Слайд 5Отличие между константами и коэффициентами заключается в возможности их изменения: константы могут
Отличие между константами и коэффициентами заключается в возможности их изменения: константы могут
Слайд 6Т.е. задача конфигурирования сводится к след.
3-х операциям:
1. определяется, должен ли каждый
Т.е. задача конфигурирования сводится к след.
3-х операциям:
1. определяется, должен ли каждый
Слайд 73. Для связанных входов задается, должен ли сигнал на данный вход поступать
3. Для связанных входов задается, должен ли сигнал на данный вход поступать
Слайд 8Для подключения к дискретным входам контроллера используется алгоритм ВДА (ввод дискретных сигналов
Для подключения к дискретным входам контроллера используется алгоритм ВДА (ввод дискретных сигналов
Слайд 10Аналоговые сигналы формируются на выходе таких алгоритмов как регуляторы, сумматоры, задатчики, интеграторы
Аналоговые сигналы формируются на выходе таких алгоритмов как регуляторы, сумматоры, задатчики, интеграторы
Слайд 11Это позволяет например, складывать два числа, каждое из которых равно 90% и
Это позволяет например, складывать два числа, каждое из которых равно 90% и
Слайд 12Обратный счет и безударность
При решении задач автоматического регулирования возникает необходимость включать, выключать
Обратный счет и безударность
При решении задач автоматического регулирования возникает необходимость включать, выключать
Слайд 13В контроллере можно реализовать два вида балансировки – статическую и динамическую. При
В контроллере можно реализовать два вида балансировки – статическую и динамическую. При
Слайд 14Вид балансировки зависит от используемых алгоритмов. Так интегратор выключает статическую балансировку, алгоритм
Вид балансировки зависит от используемых алгоритмов. Так интегратор выключает статическую балансировку, алгоритм
Слайд 15Если цепочка алгоритмов, содержащая алгоритмы (т.е. алгоритмы, способные отслеживать и запоминать начальные
Если цепочка алгоритмов, содержащая алгоритмы (т.е. алгоритмы, способные отслеживать и запоминать начальные
Слайд 16Следящий алгоритм отслеживает сигнал Xос, рассчитанный алгоритм, включенным после следящего алгоритма. В
Следящий алгоритм отслеживает сигнал Xос, рассчитанный алгоритм, включенным после следящего алгоритма. В
Слайд 18Когда регулятор переходит на ручное управление, узел интегрирования в алгоритме аналогового регулирования
Когда регулятор переходит на ручное управление, узел интегрирования в алгоритме аналогового регулирования
Слайд 19Если в задатчике ЗДН балансировка отсутствует (СБ=ДБ=0), то переход на режим автоматического
Если в задатчике ЗДН балансировка отсутствует (СБ=ДБ=0), то переход на режим автоматического
Слайд 20Если же в алгоритме ЗДН включена статическая и динамическая балансировка, то в
Если же в алгоритме ЗДН включена статическая и динамическая балансировка, то в
Слайд 21В этом случае после перехода на автоматический режим в первый момент установится
В этом случае после перехода на автоматический режим в первый момент установится
Слайд 22Условия безударности
1. Если в отключенной цепи имеется алгоритм из группы следящих алгоритмов,
Условия безударности
1. Если в отключенной цепи имеется алгоритм из группы следящих алгоритмов,
Слайд 23К группе следящих относятся алгоритмы:
- аналоговые рег. РАН
- имп. РИН
- интегр. ИНТ
-
К группе следящих относятся алгоритмы:
- аналоговые рег. РАН
- имп. РИН
- интегр. ИНТ
-
Слайд 24Если на вход С поступает дискретный сигнал С=1, переключатель отключает интегратор, при
Если на вход С поступает дискретный сигнал С=1, переключатель отключает интегратор, при
 Структура презентации
Структура презентации Исправление документов в текущем периоде
Исправление документов в текущем периоде Услуги и службы инфокоммуникаций
Услуги и службы инфокоммуникаций Создание и настройка меню приложения
Создание и настройка меню приложения Правовое просвещение пожилых людей. Лекция-семинар: Осторожно - мошенники!
Правовое просвещение пожилых людей. Лекция-семинар: Осторожно - мошенники! Роль материаловедения в графическом дизайне
Роль материаловедения в графическом дизайне Fox on a box
Fox on a box Защита информации
Защита информации Основы геоинформационного картографирования
Основы геоинформационного картографирования 8 - Nested loops
8 - Nested loops Лекция о научных публикациях
Лекция о научных публикациях Делегаты. Лямбда выражения. События. Лекция 6
Делегаты. Лямбда выражения. События. Лекция 6 Регистрация в учебной среде ИнфоДа Moodle
Регистрация в учебной среде ИнфоДа Moodle Моделирование случайных процессов в среде табличного процессора
Моделирование случайных процессов в среде табличного процессора Анимация перемещения в программе Adobe Photoshop CC. Ключи анимации
Анимация перемещения в программе Adobe Photoshop CC. Ключи анимации Внедрение ИИ – ботов в инфраструктуру городов
Внедрение ИИ – ботов в инфраструктуру городов Полезные ресурсы. Работа в Сanva
Полезные ресурсы. Работа в Сanva IRO
IRO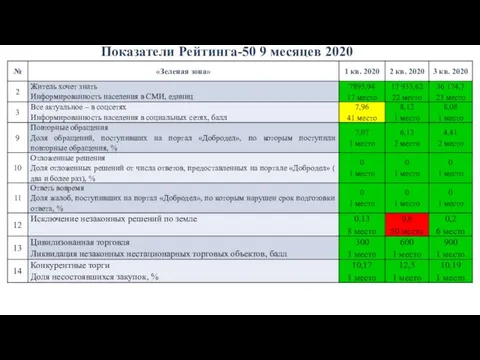 Показатели Рейтинга-50
Показатели Рейтинга-50 Новая технологическая платформа для метеообеспечения аэронавигации
Новая технологическая платформа для метеообеспечения аэронавигации ИДЗ. Алгоритм Дейкстры
ИДЗ. Алгоритм Дейкстры Работа журналиста с источниками информации
Работа журналиста с источниками информации Практическая работа Кодироваеие
Практическая работа Кодироваеие Скрин 1 на проверку
Скрин 1 на проверку Основные защитные механизмы, реализуемые в рамках различных мер и средств защиты
Основные защитные механизмы, реализуемые в рамках различных мер и средств защиты Разработка базы данных учета …
Разработка базы данных учета … Онлайн-обучение
Онлайн-обучение Основные угрозы и методы обеспечения информационной безопасности. Принципы защиты информации от несанкционированного доступа
Основные угрозы и методы обеспечения информационной безопасности. Принципы защиты информации от несанкционированного доступа