- Элементы линейной алгебры и геометрии выпуклых множеств

Содержание
- 2. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ Определение 1.3. Точка множества называется внутренней, если существует окрестность
- 3. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ Определение 1.6. Точка множества называется угловой или крайней, если
- 4. ОПРЕДЕЛЕНИЕ ВЫПУКЛОГО МНОГОГРАННИКА Определение 1.8. Выпуклое замкнутое множество точек пространства (плоскости), имеющее конечное число угловых точек,
- 5. ОПРЕДЕЛЕНИЕ БАЗИСНОГО РЕШЕНИЯ Определение 1.9. Любые m переменных системы n линейных уравнений 1.18 называются базисными, если
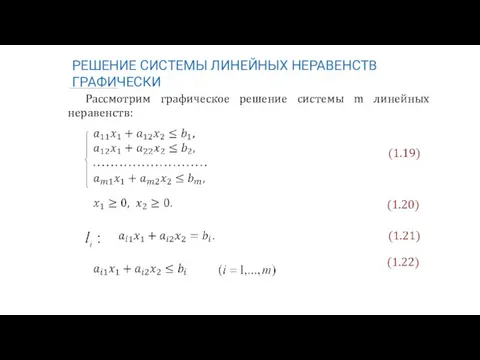
- 6. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ Рассмотрим графическое решение системы m линейных неравенств:
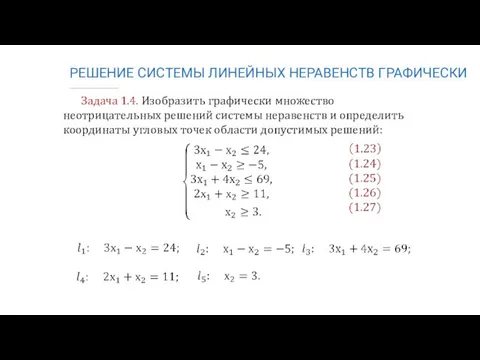
- 7. Задача 1.4. Изобразить графически множество неотрицательных решений системы неравенств и определить координаты угловых точек области допустимых
- 8. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
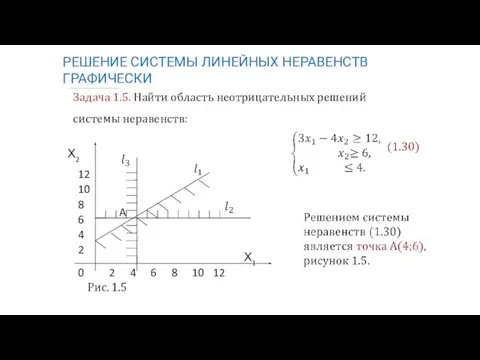
- 9. Задача 1.5. Найти область неотрицательных решений системы неравенств: РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
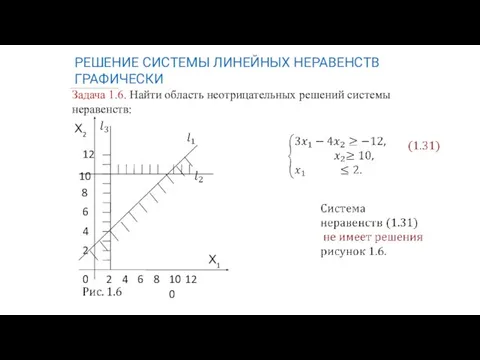
- 10. Задача 1.6. Найти область неотрицательных решений системы неравенств: РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
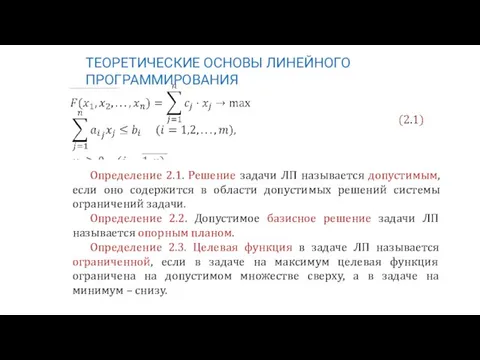
- 11. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ Определение 2.1. Решение задачи ЛП называется допустимым, если оно содержится в области
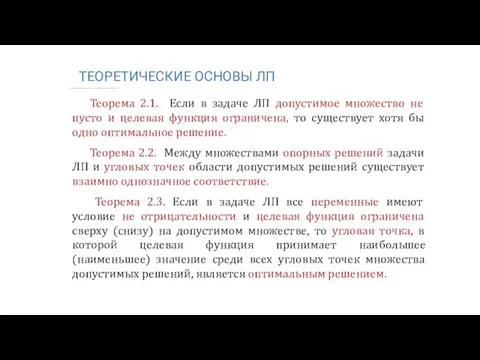
- 12. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛП Теорема 2.1. Если в задаче ЛП допустимое множество не пусто и целевая функция
- 13. ГРАФИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
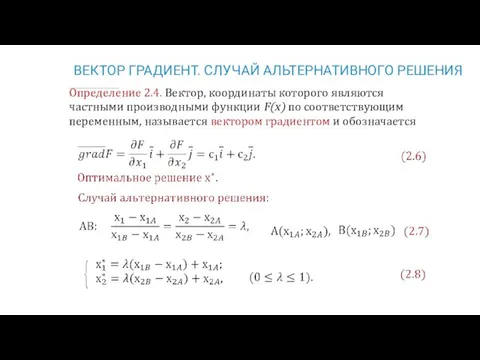
- 14. ВЕКТОР ГРАДИЕНТ. СЛУЧАЙ АЛЬТЕРНАТИВНОГО РЕШЕНИЯ Определение 2.4. Вектор, координаты которого являются частными производными функции F(x) по
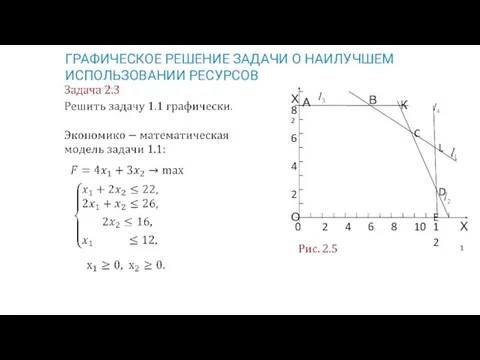
- 15. ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ
- 16. ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ :
- 17. АНАЛИЗ ВЛИЯНИЯ ПРАВОЙ ЧАСТИ АКТИВНЫХ ОГРАНИЧЕНИЙ НА ОПТИМАЛЬНОЕ РЕШЕНИЕ :
- 18. АНАЛИЗ МОДЕЛЕЙ НА ЧУВСТВИТЕЛЬНОСТЬ. В рамках анализа модели на чувствительность выявляется чувствительность оптимального решения к определенным
- 20. Скачать презентацию
Слайд 2ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ
Определение 1.3. Точка множества называется внутренней,
ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ
Определение 1.3. Точка множества называется внутренней,
Слайд 3ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ
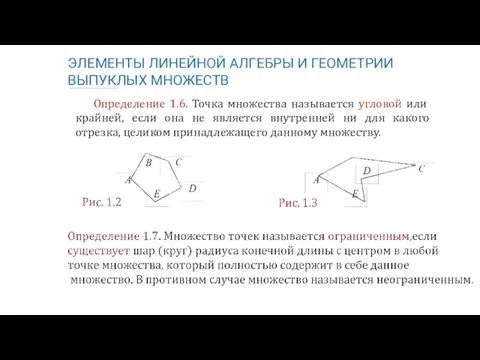
Определение 1.6. Точка множества называется угловой
ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ И ГЕОМЕТРИИ ВЫПУКЛЫХ МНОЖЕСТВ
Определение 1.6. Точка множества называется угловой
Слайд 4ОПРЕДЕЛЕНИЕ ВЫПУКЛОГО МНОГОГРАННИКА
Определение 1.8. Выпуклое замкнутое множество точек пространства (плоскости), имеющее конечное
ОПРЕДЕЛЕНИЕ ВЫПУКЛОГО МНОГОГРАННИКА
Определение 1.8. Выпуклое замкнутое множество точек пространства (плоскости), имеющее конечное
Слайд 5ОПРЕДЕЛЕНИЕ БАЗИСНОГО РЕШЕНИЯ
Определение 1.9. Любые m переменных системы n линейных уравнений 1.18
ОПРЕДЕЛЕНИЕ БАЗИСНОГО РЕШЕНИЯ
Определение 1.9. Любые m переменных системы n линейных уравнений 1.18
Слайд 6РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Рассмотрим графическое решение системы m линейных неравенств:
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Рассмотрим графическое решение системы m линейных неравенств:
Слайд 7Задача 1.4. Изобразить графически множество неотрицательных решений системы неравенств и определить координаты
Задача 1.4. Изобразить графически множество неотрицательных решений системы неравенств и определить координаты
Слайд 8
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ

Слайд 9Задача 1.5. Найти область неотрицательных решений системы неравенств:
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Задача 1.5. Найти область неотрицательных решений системы неравенств:
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Слайд 10Задача 1.6. Найти область неотрицательных решений системы неравенств:
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Задача 1.6. Найти область неотрицательных решений системы неравенств:
РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ ГРАФИЧЕСКИ
Слайд 11ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
Определение 2.1. Решение задачи ЛП называется допустимым, если оно
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
Определение 2.1. Решение задачи ЛП называется допустимым, если оно
Слайд 12ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛП
Теорема 2.1. Если в задаче ЛП допустимое множество не пусто
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЛП
Теорема 2.1. Если в задаче ЛП допустимое множество не пусто
Слайд 13ГРАФИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
ГРАФИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ

Слайд 14ВЕКТОР ГРАДИЕНТ. СЛУЧАЙ АЛЬТЕРНАТИВНОГО РЕШЕНИЯ
Определение 2.4. Вектор, координаты которого являются частными производными
ВЕКТОР ГРАДИЕНТ. СЛУЧАЙ АЛЬТЕРНАТИВНОГО РЕШЕНИЯ
Определение 2.4. Вектор, координаты которого являются частными производными
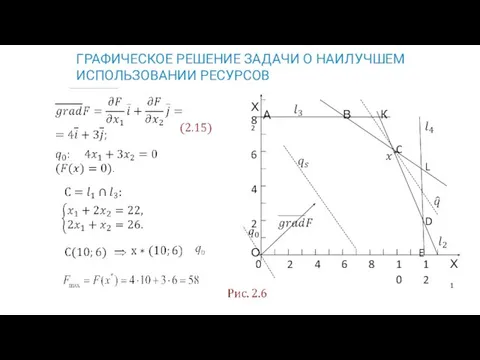
Слайд 15ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ
ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ
Слайд 16ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ
:
ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ О НАИЛУЧШЕМ ИСПОЛЬЗОВАНИИ РЕСУРСОВ
:
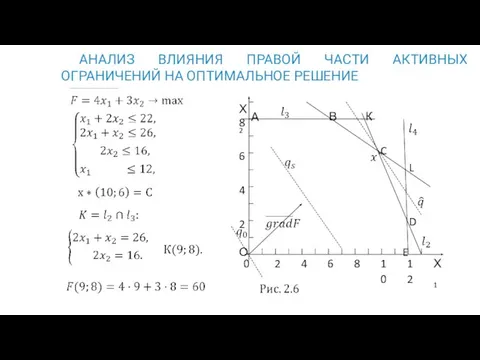
Слайд 17АНАЛИЗ ВЛИЯНИЯ ПРАВОЙ ЧАСТИ АКТИВНЫХ ОГРАНИЧЕНИЙ НА ОПТИМАЛЬНОЕ РЕШЕНИЕ
:
АНАЛИЗ ВЛИЯНИЯ ПРАВОЙ ЧАСТИ АКТИВНЫХ ОГРАНИЧЕНИЙ НА ОПТИМАЛЬНОЕ РЕШЕНИЕ
:
Слайд 18АНАЛИЗ МОДЕЛЕЙ НА ЧУВСТВИТЕЛЬНОСТЬ.
В рамках анализа модели на чувствительность выявляется чувствительность
АНАЛИЗ МОДЕЛЕЙ НА ЧУВСТВИТЕЛЬНОСТЬ.
В рамках анализа модели на чувствительность выявляется чувствительность
 Решение функции
Решение функции Устные упражнения. Площади различных фигур
Устные упражнения. Площади различных фигур Случаи вычитания 18 -
Случаи вычитания 18 - Человек трудолюбивый – самый счастливый– самый
Человек трудолюбивый – самый счастливый– самый Признаки равенства треугольников
Признаки равенства треугольников Тела вращения
Тела вращения Решение простейших тригонометрических уравнений с помощью единичной окружности
Решение простейших тригонометрических уравнений с помощью единичной окружности Прямоугольная система координат в пространстве
Прямоугольная система координат в пространстве Предельные теоремы теории вероятностей и её практические применения
Предельные теоремы теории вероятностей и её практические применения Лекции ТФКП
Лекции ТФКП Математическая викторина В гостях у мудрой совы 2 класс
Математическая викторина В гостях у мудрой совы 2 класс Одночлен. 7 класс
Одночлен. 7 класс Пирамида. Элементы пирамиды
Пирамида. Элементы пирамиды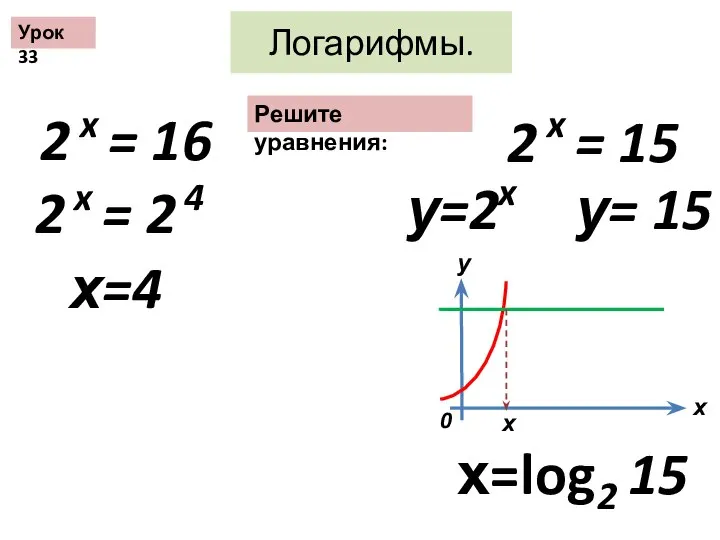 Логарифмы
Логарифмы Методы общения линейных уравнений с тремя неизвестными
Методы общения линейных уравнений с тремя неизвестными Возникновение первых математических понятий
Возникновение первых математических понятий Преобразование логарифмических выражений
Преобразование логарифмических выражений Перпендикулярные прямые
Перпендикулярные прямые Сфера и шар
Сфера и шар Площади четырехугольников
Площади четырехугольников математика
математика Презентация на тему Геометрические преобразования в пространстве
Презентация на тему Геометрические преобразования в пространстве  Мифы о Николае Ивановиче Лобачевском и его геометрии
Мифы о Николае Ивановиче Лобачевском и его геометрии Перпендикулярные прямые
Перпендикулярные прямые Десятичные и натуральные логарифмы
Десятичные и натуральные логарифмы Симметрия в пространстве. Уравнение Сферы
Симметрия в пространстве. Уравнение Сферы Разметка прямоугольника по угольнику
Разметка прямоугольника по угольнику Тригонометрические уравнения
Тригонометрические уравнения