- Градиентные методы

Содержание
- 2. Метод градиентного спуска Суть метода градиентного спуска заключается в том, что в каждой i-й точке алгоритма
- 3. Два основных класса правил определения размера шага С фиксированным коэффициентом изменения размера шага и с оптимальным
- 4. Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага Задать координаты стартовой точки Задать значения
- 5. Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага Вычислить размер шага по формуле Sk=dk*grad
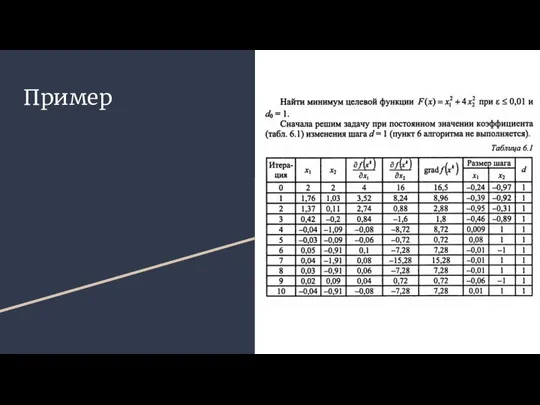
- 6. Пример
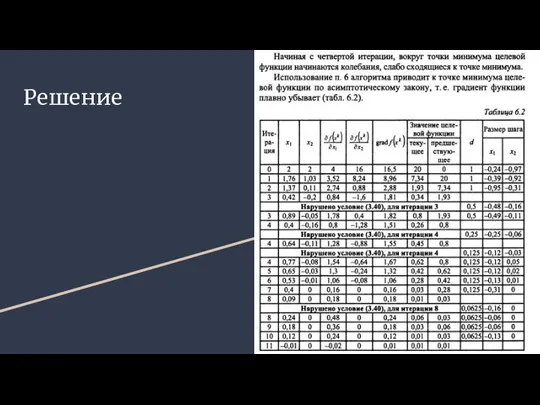
- 7. Решение
- 9. Скачать презентацию
Слайд 3Два основных класса правил определения размера шага
С фиксированным коэффициентом изменения размера шага
Два основных класса правил определения размера шага
С фиксированным коэффициентом изменения размера шага
Слайд 4 Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага
Задать
Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага
Задать
Слайд 5 Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага
Вычислить размер
Алгоритм метода градиентного спуска с использованием фиксированного коэффициента изменения шага
Вычислить размер
Слайд 6Пример
Пример
Слайд 7Решение
Решение
 Полигон частот в математической статистике
Полигон частот в математической статистике Многранники в нашей жизни
Многранники в нашей жизни Презентация на тему Производная
Презентация на тему Производная  Прямоугольные треугольники
Прямоугольные треугольники Определение неизвестного числа
Определение неизвестного числа Проверочная логарифмические неравенства и уравнение
Проверочная логарифмические неравенства и уравнение Деление одночлена на одночлен
Деление одночлена на одночлен Задание 2 по математике
Задание 2 по математике Формирование элементарных математических представлений
Формирование элементарных математических представлений Волшебная страна - Геометрия. Занятие 4
Волшебная страна - Геометрия. Занятие 4 Сосчитай-ка, угадай-ка. 4 класс
Сосчитай-ка, угадай-ка. 4 класс Дифференциальные уравнения и их применение в медицинской практике. Элементы комбинаторики. Случайные величины
Дифференциальные уравнения и их применение в медицинской практике. Элементы комбинаторики. Случайные величины Окружность. 7 класс
Окружность. 7 класс Викторина по математике Путешествие в страну Любознательных
Викторина по математике Путешествие в страну Любознательных Элементы комбинаторики. Решение простейших комбинаторных задач
Элементы комбинаторики. Решение простейших комбинаторных задач Экстремум функции. Признак постоянства функции. Исследование на экстремум
Экстремум функции. Признак постоянства функции. Исследование на экстремум Векторы плоскости
Векторы плоскости Умножение
Умножение Параллелограмм. Свойства. Признаки
Параллелограмм. Свойства. Признаки Перпендикулярность прямой и плоскости
Перпендикулярность прямой и плоскости Призма. Виды призм
Призма. Виды призм Ознакомление с понятием сантиметр
Ознакомление с понятием сантиметр Лінійне рівнянь з однією змінною. 7 клас
Лінійне рівнянь з однією змінною. 7 клас Угловые измерения. Лекция №6
Угловые измерения. Лекция №6 Задача на арифметическую прогрессию (1)
Задача на арифметическую прогрессию (1) Площадь параллелограмма
Площадь параллелограмма Презентация на тему Неравенства
Презентация на тему Неравенства  Выбор схемы измерения переменных
Выбор схемы измерения переменных